《我的第一本算法书》读书笔记
作者:宫崎修一 石田保辉
◆ 1-3 数组
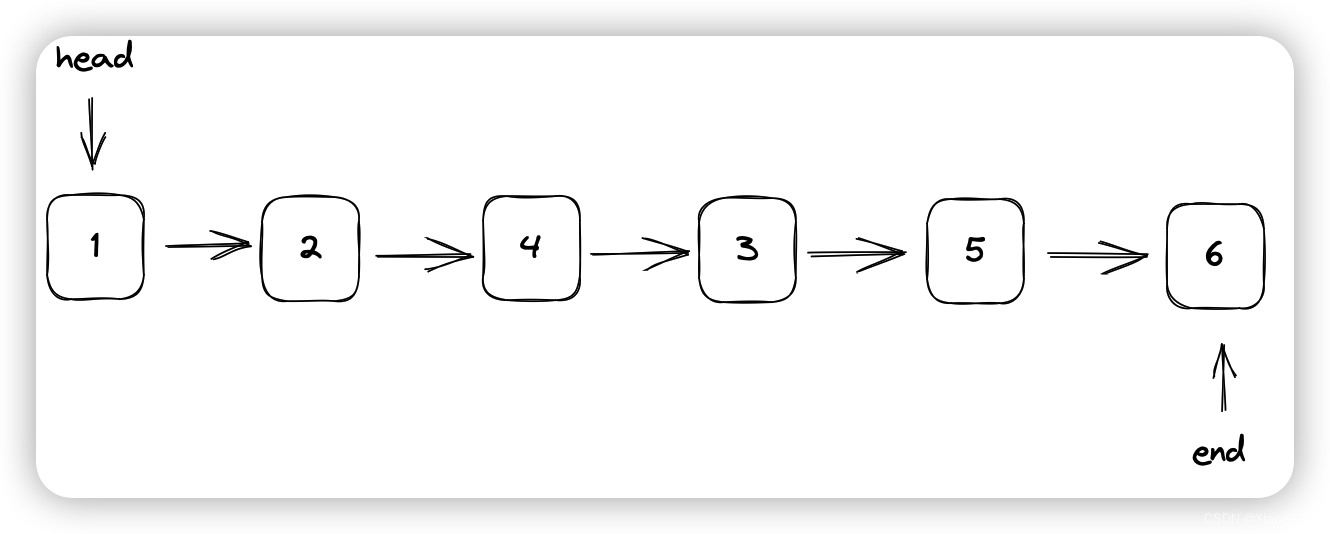
在链表和数组中,数据都是线性地排成一列。在链表中访问数据较为复杂,添加和删除数据较为简单;而在数组中访问数据比较简单,添加和删除数据却比较复杂。
◆ 1-6 哈希表
在存储数据的过程中,如果发生冲突,可以利用链表在已有数据的后面插入新数据来解决冲突。这种方法被称为“链地址法”。除了链地址法以外,还有几种解决冲突的方法。其中,应用较为广泛的是“开放地址法”。这种方法是指当冲突发生时,立刻计算出一个候补地址(数组上的位置)并将数据存进去。如果仍然有冲突,便继续计算下一个候补地址,直到有空地址为止。可以通过多次使用哈希函数或“线性探测法”等方法计算候补地址。
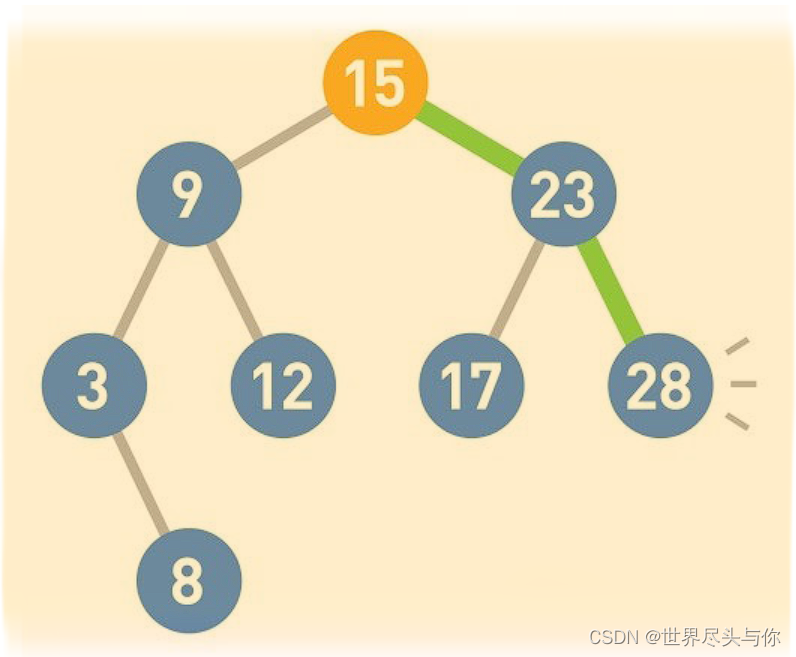
◆ 1-8 二叉查找树
二叉查找树有两个性质。第一个是每个结点的值均大于其左子树上任意一个结点的值。
第二个是每个结点的值均小于其右子树上任意一个结点的值。

根据这两个性质可以得到以下结论。首先,二叉查找树的最小结点要从顶端开始,往其左下的末端寻找。此处最小值为3。

反过来,二叉查找树的最大结点要从顶端开始,往其右下的末端寻找。此处最大值为28。
◆ 2-7 快速排序
快速排序是一种“分治法”。它将原本的问题分成两个子问题(比基准值小的数和比基准值大的数),然后再分别解决这两个问题。子问题,也就是子序列完成排序后,再像一开始说明的那样,把他们合并成一个序列,那么对原始序列的排序也就完成了。
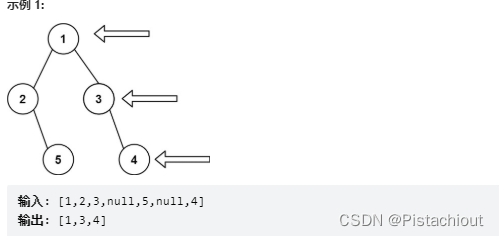
◆ 4-2 广度优先搜索
广度优先搜索的特征为从起点开始,由近及远进行广泛的搜索。因此,目标顶点离起点越近,搜索结束得就越快。
◆ 4-3 深度优先搜索
深度优先搜索的特征为沿着一条路径不断往下,进行深度搜索。虽然广度优先搜索和深度优先搜索在搜索顺序上有很大的差异,但是在操作步骤上却只有一点不同,那就是选择哪一个候补顶点作为下一个顶点的基准不同。广度优先搜索选择的是最早成为候补的顶点,因为顶点离起点越近就越早成为候补,所以会从离起点近的地方开始按顺序搜索;而深度优先搜索选择的则是最新成为候补的顶点,所以会一路往下,沿着新发现的路径不断深入搜索。
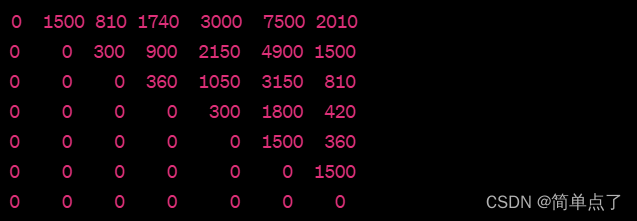
◆ 4-5 狄克斯特拉算法
比起需要对所有的边都重复计算权重和更新权重的贝尔曼-福特算法,狄克斯特拉算法多了一步选择顶点的操作,这使得它在求最短路径上更为高效。
总的来说,就是不存在负数权重时,更适合使用效率较高的狄克斯特拉算法,而存在负数权重时,即便较为耗时,也应该使用可以得到正确答案的贝尔曼-福特算法。
◆ 4-6 A*算法
如果我们能得到一些启发信息,即各个顶点到终点的大致距离(这个距离不需是准确的值)我们就能使用A算法。当然,有时这类信息是完全无法估算的,这时就不能使用A算法。
距离估算值越接近当前顶点到终点的实际值,A*算法的搜索效率也就越高;反过来,如果距离估算值与实际值相差较大,那么该算法的效率可能会比狄克斯特拉算法的还要低。如果差距再大一些,甚至可能无法得到正确答案。
◆ 5-3 哈希函数
输入相似的数据并不会导致输出的哈希值也相似。
◆ 6-2 k-means算法
k-means算法中,随着操作的不断重复,中心点的位置必定会在某处收敛
由于k-means算法需要事先确定好簇的数量,所以设定的数量如果不合理,运行的结果就可能会不符合我们的需求。
在层次聚类算法中,一开始每个数据都自成一类。也就是说,有n个数据就会形成n个簇。然后重复执行“将距离最近的两个簇合并为一个”的操作n-1次。每执行1次,簇就会减少1个。执行n-1次后,所有数据就都被分到了一个簇中。在这个过程中,每个阶段的簇的数量都不同,对应的聚类结果也不同。只要选择其中最为合理的1个结果就好。
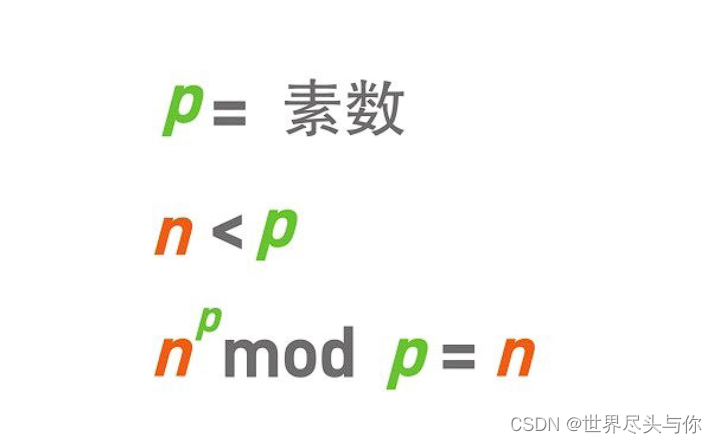
◆ 7-2 素性测试
实际上不只是5,对于任意素数p,下面的公式都是成立的。这就是“费马小定理”。根据是否满足费马小定理来判断一个数是否为素数的方法就是“费马测试”。