一、CAN协议介绍
1、简介
CAN是控制器局域网络(Controller Area Network, CAN)的简称,是一种能够实现分布式实时控制的串行通信网络。
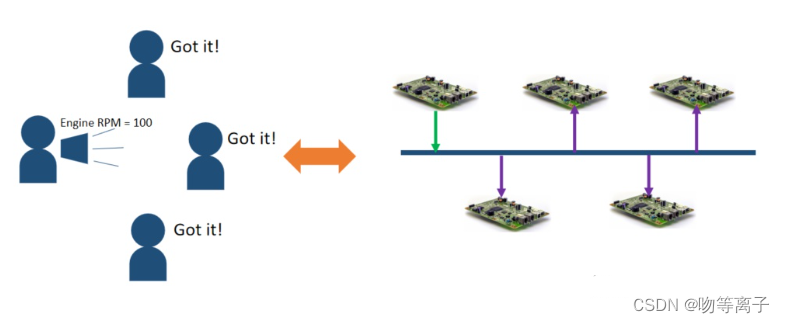
其实可以简单把CAN通信理解成开一场电话会议,当一个人讲话时其他人就听(广播),当多个人同时讲话时则根据一定规则来决定谁先讲话谁后讲话(仲裁)。
在这场会议中,讲话人会确认听话人是否成功接收信息,如果说话人传递的信息有误,听话人会及时指出错误。
 优点:
优点:
- 速度高:传输速度最高到1Mbps(CAN-FD和CAN-XL分别可以达到2 Mbit/s和10 Mbit/s。),通信距离最远到10km,无损位仲裁机制,多主结构。近些年来,CAN控制器价格越来越低。
- 低成本:多主通信模式,大幅减少单点通信线束成本。
- 高集成:CAN总线系统允许在所有ECUs上进行集中错误诊断和配置。
- 可靠性:具有错误侦听的自我诊断功能,通信可靠信较高。
- 高效率:可以通过id对消息进行优先级排序,以便最高优先