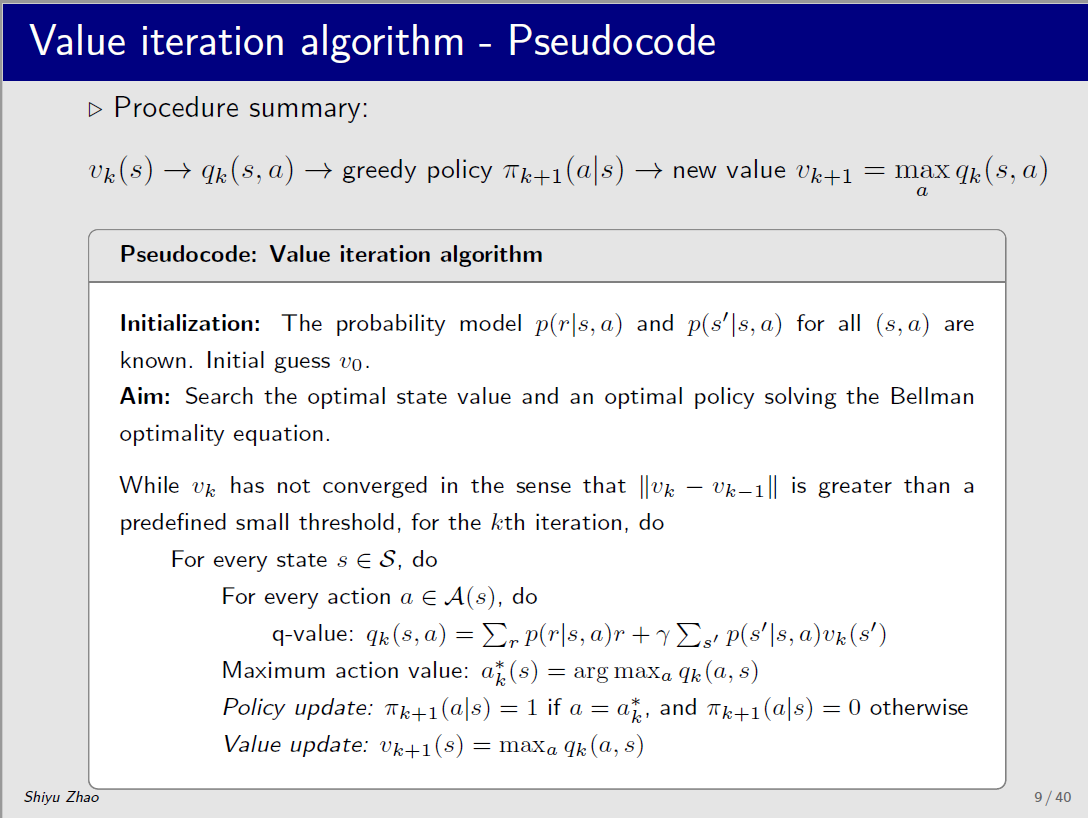
Value Iteration Algorithm
其算法思想是: 在每一个状态s下,
之迭代算法流程如下:
初始化状态价值state value,即对每个状态的价值都赋一个初始值,一般是0
计算每一个状态-动作对的 动作价值函数,通常通过创建一个二维表格,称为q表格
对每个状态s,最优策略
a
∗
=
arg max
a
q
(
s
,
a
)
a^*=\argmax_a q(s,a)
a∗=argmaxaq(s,a)
策略更新:
π
(
a
∣
s
)
=
1
\pi(a \mid s)=1
π(a∣s)=1 if
a
=
a
∗
a=a^*
a=a∗
价值更新:
policy update:
π
k
+
1
(
s
)
=
arg
max
π
∑
a
π
(
a
∣
s
)
(
∑
r
p
(
r
∣
s
,
a
)
r
+
γ
∑
s
′
p
(
s
′
∣
s
,
a
)
v
k
(
s
′
)
)
⏟
q
k
(
s
,
a
)
,
s
∈
S
\pi_{k+1}(s)=\arg \max _{\pi} \sum_{a} \pi(a \mid s) \underbrace{\left(\sum_{r} p(r \mid s, a) r+\gamma \sum_{s^{\prime}} p\left(s^{\prime} \mid s, a\right) v_{k}\left(s^{\prime}\right)\right)}_{q_{k}(s, a)}, \quad s \in \mathcal{S}
πk+1(s)=argπmaxa∑π(a∣s)qk(s,a)
(r∑p(r∣s,a)r+γs′∑p(s′∣s,a)vk(s′)),s∈S
value update
v
k
+
1
(
s
)
=
∑
a
π
k
+
1
(
a
∣
s
)
(
∑
r
p
(
r
∣
s
,
a
)
r
+
γ
∑
s
′
p
(
s
′
∣
s
,
a
)
v
k
(
s
′
)
)
⏟
q
k
(
s
,
a
)
,
s
∈
S
v_{k+1}(s)=\sum_{a} \pi_{k+1}(a \mid s) \underbrace{\left(\sum_{r} p(r \mid s, a) r+\gamma \sum_{s^{\prime}} p\left(s^{\prime} \mid s, a\right) v_{k}\left(s^{\prime}\right)\right)}_{q_{k}(s, a)}, \quad s \in \mathcal{S}
vk+1(s)=a∑πk+1(a∣s)qk(s,a)
(r∑p(r∣s,a)r+γs′∑p(s′∣s,a)vk(s′)),s∈S
因为这里的
π
k
+
1
\pi_{k+1}
πk+1是贪婪方法,所以上式可以简化成:
v
k
+
1
(
s
)
=
max
a
q
k
(
a
,
s
)
v_{k+1}(s)=\max_a q_k(a,s)
vk+1(s)=amaxqk(a,s)
步骤1:更新策略,求
π
k
+
1
\pi_{k+1}
πk+1
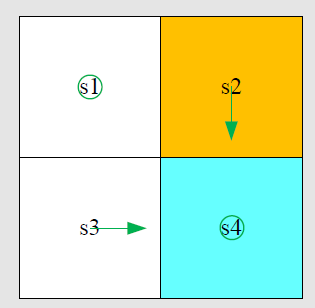
一个例子
下图是一个例子,如何在一个2*2网格世界中,找到任何一个网格到蓝色方格的最短路径,即寻找最优策略pi。
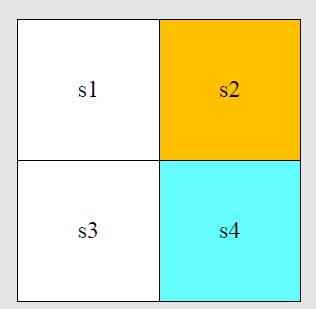
状态空间
S
=
{
s
i
}
i
=
1
4
S=\{s_i\}_{i=1}^4
S={si}i=14;
动作空间
A
=
{
a
i
}
i
=
1
5
A=\{a_i\}_{i=1}^5
A={ai}i=15,
a
1
a_1
a1(向上移动),
a
2
a_2
a2(向右移动),
a
3
a_3
a3(向下移动),
a
4
a_4
a4(向左移动),
a
5
a_5
a5(原地不动);
奖励为:
r
b
o
u
n
d
a
r
y
=
r
f
o
r
b
i
d
d
e
n
=
−
1
,
r
t
a
r
g
e
t
=
1
r_{boundary}=r_{forbidden}=-1,r_{target}=1
rboundary=rforbidden=−1,rtarget=1;
折扣率
γ
=
0.9
\gamma=0.9
γ=0.9
手推求解
初始化所有
v
(
s
i
)
=
0
,
i
=
1
,
2
,
3
,
4
v(s_i)=0,i=1,2,3,4
v(si)=0,i=1,2,3,4
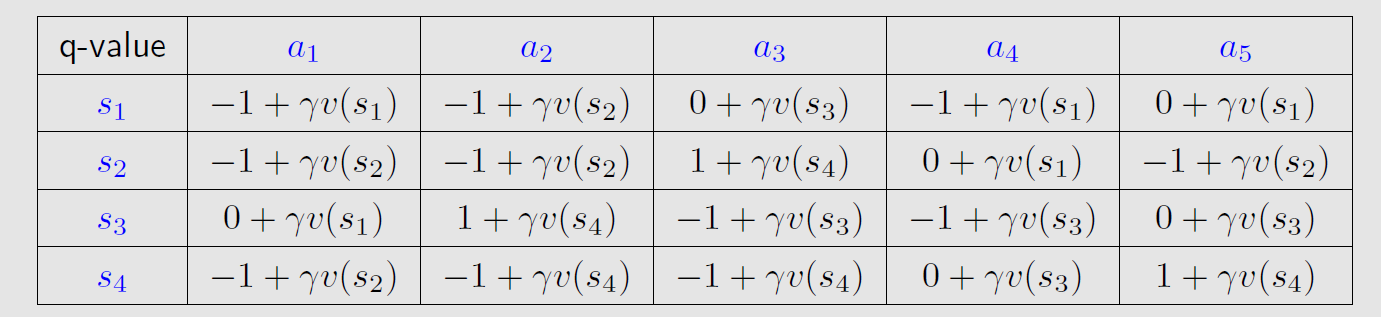
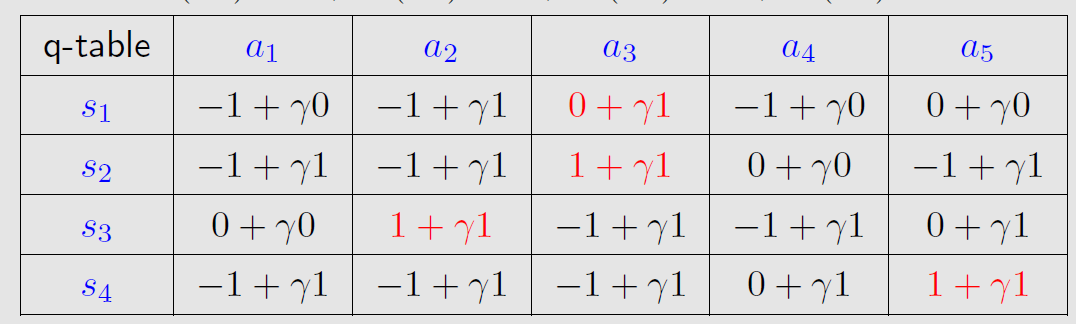
初始化q表格,根据动作价值函数
q
(
s
,
a
)
q(s,a)
q(s,a)表达式写出q表格如下:
第1轮迭代:
令
v
0
(
s
1
)
=
v
0
(
s
2
)
=
v
0
(
s
3
)
=
v
0
(
s
4
)
=
0
v_0(s_1)=v_0(s_2)=v_0(s_3)=v_0(s_4)=0
v0(s1)=v0(s2)=v0(s3)=v0(s4)=0,将
v
0
(
s
i
)
v_0(s_i)
v0(si)带入刚才的q表格,有:
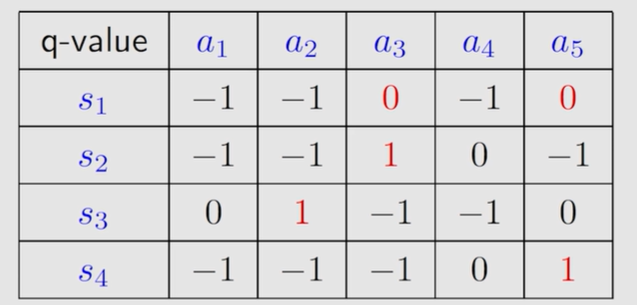
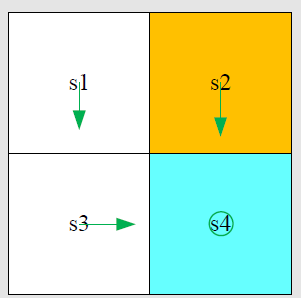
有了上方表格,可以进行Policy update,并将该策略绘制出来:
π
1
(
a
5
∣
s
1
)
=
1
\pi_1(a_5 \mid s_1)=1
π1(a5∣s1)=1
π
1
(
a
3
∣
s
2
)
=
1
\pi_1(a_3 \mid s_2)=1
π1(a3∣s2)=1
π
1
(
a
2
∣
s
3
)
=
1
\pi_1(a_2 \mid s_3)=1
π1(a2∣s3)=1
π
1
(
a
5
∣
s
4
)
=
1
\pi_1(a_5 \mid s_4)=1
π1(a5∣s4)=1
有了策略可以进行Value update:
v
1
(
s
1
)
=
0
v_1(s_1)=0
v1(s1)=0
v
1
(
s
2
)
=
1
v_1(s_2)=1
v1(s2)=1
v
1
(
s
3
)
=
1
v_1(s_3)=1
v1(s3)=1
v
1
(
s
4
)
=
0
v_1(s_4)=0
v1(s4)=0
继续迭代k=1,将
v
1
(
s
i
)
v_1(s_i)
v1(si)的值,带入q表格中:
有了上方表格,可以进行Policy update,并将该策略表示出来:
π
2
(
a
3
∣
s
1
)
=
1
\pi_2(a_3 \mid s_1)=1
π2(a3∣s1)=1
π
2
(
a
3
∣
s
2
)
=
1
\pi_2(a_3 \mid s_2)=1
π2(a3∣s2)=1
π
2
(
a
2
∣
s
3
)
=
1
\pi_2(a_2 \mid s_3)=1
π2(a2∣s3)=1
π
2
(
a
5
∣
s
4
)
=
1
\pi_2(a_5 \mid s_4)=1
π2(a5∣s4)=1
有了策略可以进行Value update:
v
2
(
s
1
)
=
γ
1
=
0.9
v_2(s_1)=\gamma1=0.9
v2(s1)=γ1=0.9
v
2
(
s
2
)
=
1
+
γ
=
1.9
v_2(s_2)=1+\gamma=1.9
v2(s2)=1+γ=1.9
v
2
(
s
3
)
=
1
+
γ
=
1.9
v_2(s_3)=1+\gamma=1.9
v2(s3)=1+γ=1.9
v
2
(
s
4
)
=
1
+
γ
=
1.9
v_2(s_4)=1+\gamma=1.9
v2(s4)=1+γ=1.9
此时,肉眼观察,已经得出最优策略。在编程时,则需要继续迭代k=2,3,…,直至 ∣ ∣ v k − v k + 1 ∣ ∣ < ε , ε → 0 ||v_k-v_{k+1}||<\varepsilon,\varepsilon \to 0 ∣∣vk−vk+1∣∣<ε,ε→0
2 编程求解
定义网格世界GridWorld如下图,求解每个状态的价值函数。
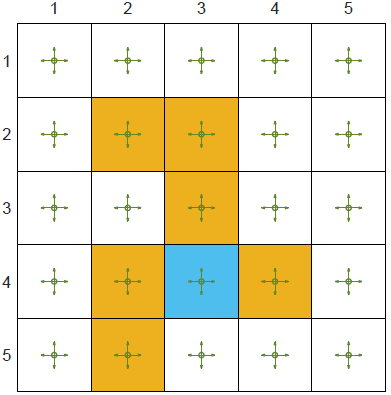
状态空间 :
`{0: (0, 0), 1: (0, 1), 2: (0, 2), 3: (0, 3), 4: (0, 4),
5: (1, 0), 6: (1, 1), 7: (1, 2), 8: (1, 3), 9: (1, 4),
10: (2, 0), 11: (2, 1), 12: (2, 2), 13: (2, 3), 14: (2, 4),
15: (3, 0), 16: (3, 1), 17: (3, 2), 18: (3, 3), 19: (3, 4),
20: (4, 0), 21: (4, 1), 22: (4, 2), 23: (4, 3), 24: (4, 4)}`
动作空间:有5种动作,上右下左,不动
{0: '↑', 1: '→', 2: '↓', 3: '←', 4: '○'}
import numpy as np
class GridWorldEnv:
def __init__(self, isSlippery=False):
self.seed = np.random.seed(47)
self.shape = (5, 5)
self.gridWorld = np.zeros(shape=self.shape, dtype=np.int64)
self.forbiddenGrid = [(1, 1), (1, 2), (2, 2), (3, 1), (3, 3), (4, 1)]
self.targetGrid = (3, 2)
self.stateSpace = self.initStateSpace()
self.actionSpace = {0: "↑", 1: "→", 2: "↓", 3: "←", 4: "○", }
self.action_dim = len(self.actionSpace)
self.state_dim = np.prod(self.shape)
self.buildGridWorld()
self.curState = 0
print("状态空间", self.stateSpace)
print("动作空间", self.actionSpace)
print("网格世界\n", self.gridWorld)
def buildGridWorld(self):
for x in range(5):
for y in range(5):
if (x, y) in self.forbiddenGrid:
self.gridWorld[x][y] = -1
self.gridWorld[3][2] = 1
def initStateSpace(self):
stateSpace = {}
for x in range(5):
for y in range(5):
stateSpace[5 * x + y] = (x, y)
return stateSpace
def step(self, a):
x, y = divmod(self.curState, 5)
oldState = 5 * x + y
if a == 0: x -= 1 # 上
if a == 1: y += 1 # 右
if a == 2: x += 1 # 下
if a == 3: y -= 1 # 左
reward = 0
nextState = 5 * x + y
done = False
# 尝试越过边界,奖励-1
if (x < 0 or y < 0) or (x > 4 or y > 4):
reward = -1
nextState = oldState
self.curState = oldState
# 进入forbidden区域,奖励-10
if (x, y) in self.forbiddenGrid:
reward = -10
done = True
# 达到目标点,奖励1
if (x, y) == self.targetGrid:
reward = 1
done = True
return nextState, reward, done
def reset(self, state=None):
if state is None:
self.curState = 0
return 0
else:
self.curState = state
return state
class ValIter:
def __init__(self, env: GridWorldEnv):
self.env = env
self.policy = np.zeros(shape=self.env.state_dim, dtype=np.int64)
self.value = np.zeros(shape=self.env.state_dim, dtype=np.float64)
self.q_table = np.zeros(shape=(env.state_dim, env.action_dim))
self.trace = {"pi": [self.policy], "v": [self.value], "q_table": [self.q_table]}
def policyUpdate(self, q_table):
for s in self.env.stateSpace:
self.policy[s] = np.argmax(q_table[s])
self.trace["pi"].append(self.policy)
def valueUpdate(self, q_table):
for s in self.env.stateSpace:
self.value[s] = np.max(q_table[s])
self.trace["v"].append(self.value)
self.trace["q_table"].append(self.q_table)
def stateValFunc(self, s):
return self.value[s]
def actionValFunc(self, s, a):
self.env.reset(s)
next_state, reward, _ = self.env.step(a)
return reward + 0.9 * self.stateValFunc(next_state)
def valueIteration(self):
iter = 0
while True:
for s in self.env.stateSpace.keys():
for a in self.env.actionSpace:
self.q_table[s][a] = self.actionValFunc(s, a)
old_state_val = np.sum(self.value)
self.policyUpdate(self.q_table)
self.valueUpdate(self.q_table)
new_state_val = np.sum(self.value)
iter += 1
if np.abs(new_state_val - old_state_val) < 1e-6:
print("iter=", iter)
break
pi = self.trace["pi"][-1]
v = self.trace["v"][-1]
q_table = self.trace["q_table"][-1]
for s in self.env.stateSpace.keys():
a = pi[s]
print(self.env.actionSpace[a], end="\t")
if (s + 1) % 5 == 0:
print()
for s in self.env.stateSpace.keys():
print("%.4f" % v[s], end="\t")
if (s + 1) % 5 == 0:
print()
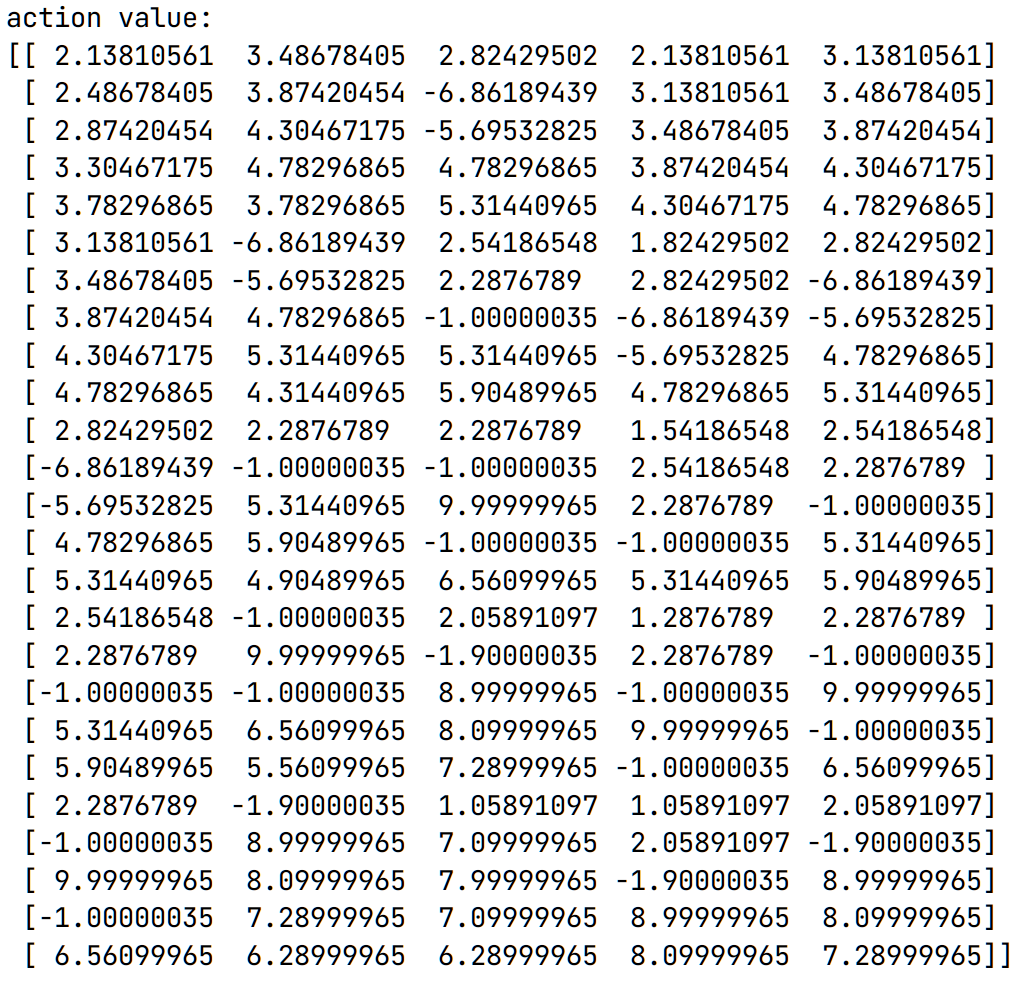
print(q_table)
if __name__ == '__main__':
env = GridWorldEnv()
valIter = ValIter(env)
valIter.valueIteration()
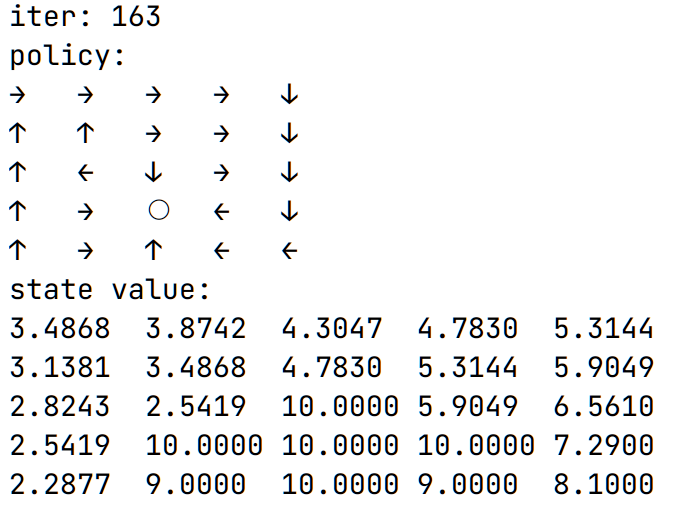
结果: