踩坑记录
1、如果SD卡曾经
做过系统盘(比如说:作为树莓派的系统盘),那么要把系统盘的分区合并成一个(这个网上有很多教程),并重新格式化,否则实验会失败。
2、并不是买回来的新的SD卡就一定能用(并不是说用读卡器插在电脑上能够正常读写,就表示一定能够实验成功),买过几张卡,确实有不能用的,导致改bug搞了一下午没有成功。
3、可以先运行一下IDF提供的SD卡示例,判断是否能够挂载文件系统成功(如果能够正常读取卡信息就表示成功了)。
说明:实验没有采用lv_fs_if作为一个组件的移植方式,可能与网上的资料稍有不同。
移植过程
说明:本实验是在该实验点击这里的基础上进行的。
1、打开小齿轮(SDK Configureation editor)找到3rd Party Libraries,选中File sysytem on top of FatFS,修改下面为83(ASCII中的‘S’),下面是读取使用的缓冲区大小。
2、创建新的小组件(ctrl+shift+p ESP-IDF:创建新的ESP-IDF组件命名为sd_card(可自行更改)),在include文件夹中创建sd_card.h文件,include文件夹之外创建sd_card.c和CMakeLists.txt文件。三个文件的内容如下。(sd_card组件代码内容是由sd卡示例文件sdspi示例项目修改而来,可直接使用下面文件,也可以自己去更改。)

//*************************************sd_card.h文件内容******************************************
#ifndef _SD_CARD_H
#define _SD_CARD_H
#ifdef __cplusplus
extern "C" {
#endif
#include <string.h>
#include <sys/unistd.h>
#include <sys/stat.h>
#include "esp_vfs_fat.h"
#include "sdmmc_cmd.h"
#include "esp_err.h"
static const char *TAG = "TFCARD";
#define MOUNT_POINT "/sdcard"
#define SPI_DMA_CHAN 1
// Pin assignments can be set in menuconfig, see "SD SPI Example Configuration" menu.
// You can also change the pin assignments here by changing the following 4 lines.
#define PIN_NUM_MISO 19
#define PIN_NUM_MOSI 23
#define PIN_NUM_CLK 18
#define PIN_NUM_CS 5
esp_err_t sd_init();
#ifdef __cplusplus
} /*extern "C"*/
#endif
#endif
//************************************sd_card.c文件内容*******************************************
#include "sd_card.h"
sdmmc_card_t *card;
esp_err_t sd_init()
{
esp_err_t ret;
// Options for mounting the filesystem.
// If format_if_mount_failed is set to true, SD card will be partitioned and
// formatted in case when mounting fails.
esp_vfs_fat_sdmmc_mount_config_t mount_config = {
.format_if_mount_failed = false,
.max_files = 5,
.allocation_unit_size = 16 * 1024
};
const char mount_point[] = MOUNT_POINT;
ESP_LOGI(TAG, "Initializing SD card");
// Use settings defined above to initialize SD card and mount FAT filesystem.
// Note: esp_vfs_fat_sdmmc/sdspi_mount is all-in-one convenience functions.
// Please check its source code and implement error recovery when developing
// production applications.
ESP_LOGI(TAG, "Using SPI peripheral");
sdmmc_host_t host = SDSPI_HOST_DEFAULT();
host.slot = VSPI_HOST;
spi_bus_config_t bus_cfg = {
.mosi_io_num = PIN_NUM_MOSI,
.miso_io_num = PIN_NUM_MISO,
.sclk_io_num = PIN_NUM_CLK,
.quadwp_io_num = -1,
.quadhd_io_num = -1,
.max_transfer_sz = 4*1024*sizeof(uint8_t),
};
ret = spi_bus_initialize(host.slot, &bus_cfg, host.slot);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Failed to initialize bus.");
return;
}
// This initializes the slot without card detect (CD) and write protect (WP) signals.
// Modify slot_config.gpio_cd and slot_config.gpio_wp if your board has these signals.
sdspi_device_config_t slot_config = SDSPI_DEVICE_CONFIG_DEFAULT();
slot_config.gpio_cs = PIN_NUM_CS;
slot_config.host_id = host.slot;
ESP_LOGI(TAG, "Mounting filesystem");
ret = esp_vfs_fat_sdspi_mount(mount_point, &host, &slot_config, &mount_config, &card);
if (ret != ESP_OK) {
if (ret == ESP_FAIL) {
ESP_LOGE(TAG, "Failed to mount filesystem. "
"If you want the card to be formatted, set the CONFIG_EXAMPLE_FORMAT_IF_MOUNT_FAILED menuconfig option.");
} else {
ESP_LOGE(TAG, "Failed to initialize the card (%s). "
"Make sure SD card lines have pull-up resistors in place.", esp_err_to_name(ret));
}
return ESP_FAIL;
}
ESP_LOGI(TAG, "Filesystem mounted");
// Card has been initialized, print its properties
sdmmc_card_print_info(stdout, card);
return ESP_OK;
}
//******************************CMakeLists.txt文件内容*******************************************
idf_component_register(
SRCS "sd_card.c"
INCLUDE_DIRS "include"
REQUIRES fatfs)
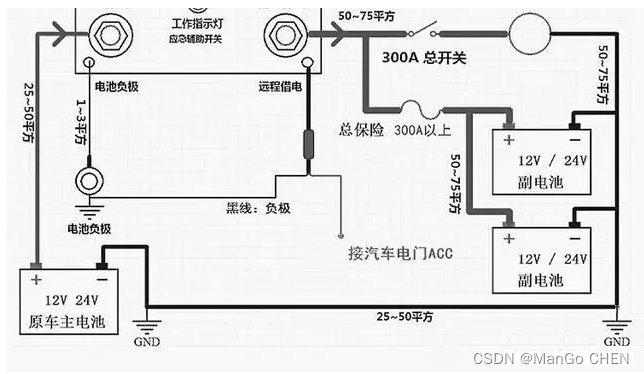
3、SD卡接线方式,如果想节省一个引脚,可将CS引脚直接接地。接线方式与安信可esp-cam模组相同,原理图参考
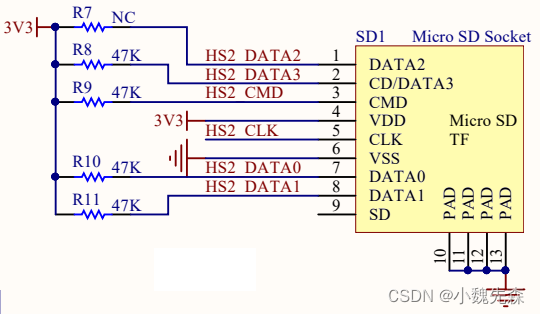
| ESP32引脚 | SD卡引脚 |
|---|---|
| 19 | MISO |
| 23 | MOSI |
| 18 | CLK |
| 5 | CS |
4、因为LVGL要使用文件系统和初始化SD卡,所以
LVGL要依赖fatfs和sd_card组件。打开lvgl–>env_support–>cmake–>esp.cmake文件,在第45行位置添加依赖(REQUIRES后面的内容),添加后的依赖如下:
idf_component_register(SRCS ${SOURCES} ${EXAMPLE_SOURCES} ${DEMO_SOURCES}
INCLUDE_DIRS ${LVGL_ROOT_DIR} ${LVGL_ROOT_DIR}/src ${LVGL_ROOT_DIR}/../
${LVGL_ROOT_DIR}/examples ${LVGL_ROOT_DIR}/demos
REQUIRES esp_timer
fatfs
sd_card)
5、打开
lv_fs_fatfs.c文件(路径:lvgl/src/extra/libs/fsdrv/),添加sd_card.h头文件(在第10行位置:#include "sd-card.h")。将第230行的两个DIR修改为FF_DIR。在第92行处fs_init(void)函数中调用sd_init()函数来初始化sd卡。
6、注:这种方式移植文件系统与使用lv_fs_if组件的方式不同,当调用lv_init()函数的时候,就已经初始化SD卡并且挂载了文件系统。所以对于上一次实验,不需要更改main.c的任何内容,就实现了初始化SD卡和文件系统。
测试
1、将上次实验的main.c直接拿过来。在
lv_init()之后使用vTaskDelay(pdMS_TO_TICKS(5));延时5ms,然后在初始化屏幕驱动(lvgl_driver_init();),不然可能出现花屏。
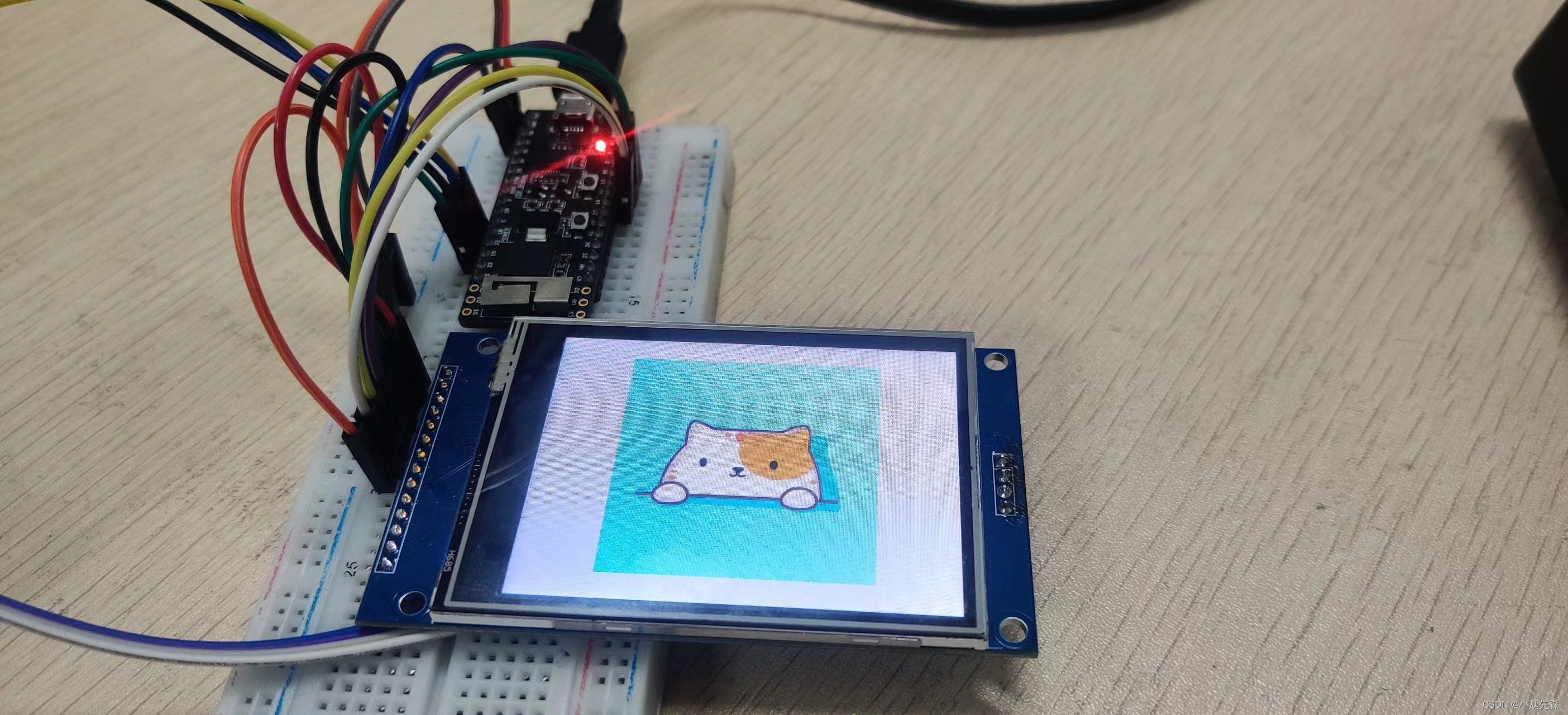
2、在阿里巴巴矢量图标库中随便下载一个200像素的小图片,并将图片在LVGL官网提供的图片转化工具Online Image Converter中生成二进制.bin文件。并将改文件存储到SD卡中pictures文件夹中。
3、使用SquareLine studio工具1.2.2版本,拖拽一个image控件放到屏幕中。像下面这样。将生成的文件放在my_ui组建中(上一实验最后有讲)。
4、在main.c的ui_init()函数之后,调用lv_img_set_src(ui_Image2,“S:pictures/xxx.bin”);其中xxx是图片的名字。运行结果如下,表明SD卡文件系统移植成功:


完整的主文件代码(main.c)如下:
#include <stdbool.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_freertos_hooks.h"
#include "freertos/semphr.h"
#include "esp_system.h"
#include "driver/gpio.h"
#include "lvgl/lvgl.h"
#include "lvgl_helpers.h"
#include <lv_demos.h>
#include <ui.h>
/*********************
* DEFINES
*********************/
#define TAG "demo"
#define LV_TICK_PERIOD_MS 1
/**********************
* STATIC PROTOTYPES
**********************/
static void lv_tick_task(void *arg);
static void guiTask(void *pvParameter);
/**********************
* APPLICATION MAIN
**********************/
void app_main() {
xTaskCreatePinnedToCore(guiTask, "gui", 4096*2, NULL, 0, NULL, 1);
}
SemaphoreHandle_t xGuiSemaphore;
static void guiTask(void *pvParameter) {
(void) pvParameter;
xGuiSemaphore = xSemaphoreCreateMutex();
lv_init();
vTaskDelay(pdMS_TO_TICKS(5));
lvgl_driver_init();
lv_color_t* buf1 = heap_caps_malloc(DISP_BUF_SIZE * sizeof(lv_color_t), MALLOC_CAP_DMA);
assert(buf1 != NULL);
static lv_color_t *buf2 = NULL;
static lv_disp_draw_buf_t disp_buf;
uint32_t size_in_px = DISP_BUF_SIZE;
lv_disp_draw_buf_init(&disp_buf, buf1, buf2, size_in_px);
lv_disp_drv_t disp_drv;
lv_disp_drv_init(&disp_drv);
disp_drv.flush_cb = disp_driver_flush;
disp_drv.draw_buf = &disp_buf;
lv_disp_drv_register(&disp_drv);
const esp_timer_create_args_t periodic_timer_args = {
.callback = &lv_tick_task,
.name = "periodic_gui"
};
esp_timer_handle_t periodic_timer;
ESP_ERROR_CHECK(esp_timer_create(&periodic_timer_args, &periodic_timer));
ESP_ERROR_CHECK(esp_timer_start_periodic(periodic_timer, LV_TICK_PERIOD_MS * 1000));
/* 在这里更换自己的UI */
ui_init();
lv_img_set_src(ui_Image2,"S:pictures/cat.bin");
while (1) {
/* Delay 1 tick (assumes FreeRTOS tick is 10ms */
vTaskDelay(pdMS_TO_TICKS(10));
/* Try to take the semaphore, call lvgl related function on success */
if (pdTRUE == xSemaphoreTake(xGuiSemaphore, portMAX_DELAY)) {
lv_task_handler();
xSemaphoreGive(xGuiSemaphore);
}
}
/* A task should NEVER return */
free(buf1);
vTaskDelete(NULL);
}
static void lv_tick_task(void *arg) {
(void) arg;
lv_tick_inc(LV_TICK_PERIOD_MS);
}