深度学习训练营
- 原文链接
- 前言
- 0.导入需要的包以及基本配置
- 1.基本组件
- 1.1 autopad
- 1.2 Conv
- DWConv模块
- 1.3TransformerLayer模块
- 1.4 Bottleneck和BottleneckCSP
- Bottleneck模型结构
- 1.5 CrossConv模块
- 1.6 C3模块
- 基于C3的改进
- 1.7SPP
- 1.8Focus模块
- 1.9 Concat模块
- 1.10 Contract和Expand
- 1.11 拓展补充
- 2.重要内容
- 2.1 非极大抑制(NMS)
- DetectMultiBackend
- 2.2 AutoShape
- 2.3 Detections
- 2.4 Photo
- 2.5 Classify
- 参考内容
原文链接
- 🍨 本文为🔗365天深度学习训练营 中的学习记录博客
- 🍦 参考文章:365天深度学习训练营-第P1周:实现mnist手写数字识别
- 🍖 原作者:K同学啊|接辅导、项目定制
Yolov5之common.py文件解读
- 原文链接
- 前言
- 0.导入需要的包以及基本配置
- 1.基本组件
- 1.1 autopad
- 1.2 Conv
- DWConv模块
- 1.3TransformerLayer模块
- 1.4 Bottleneck和BottleneckCSP
- Bottleneck模型结构
- 1.5 CrossConv模块
- 1.6 C3模块
- 基于C3的改进
- 1.7SPP
- 1.8Focus模块
- 1.9 Concat模块
- 1.10 Contract和Expand
- 1.11 拓展补充
- 2.重要内容
- 2.1 非极大抑制(NMS)
- DetectMultiBackend
- 2.2 AutoShape
- 2.3 Detections
- 2.4 Photo
- 2.5 Classify
- 参考内容
前言
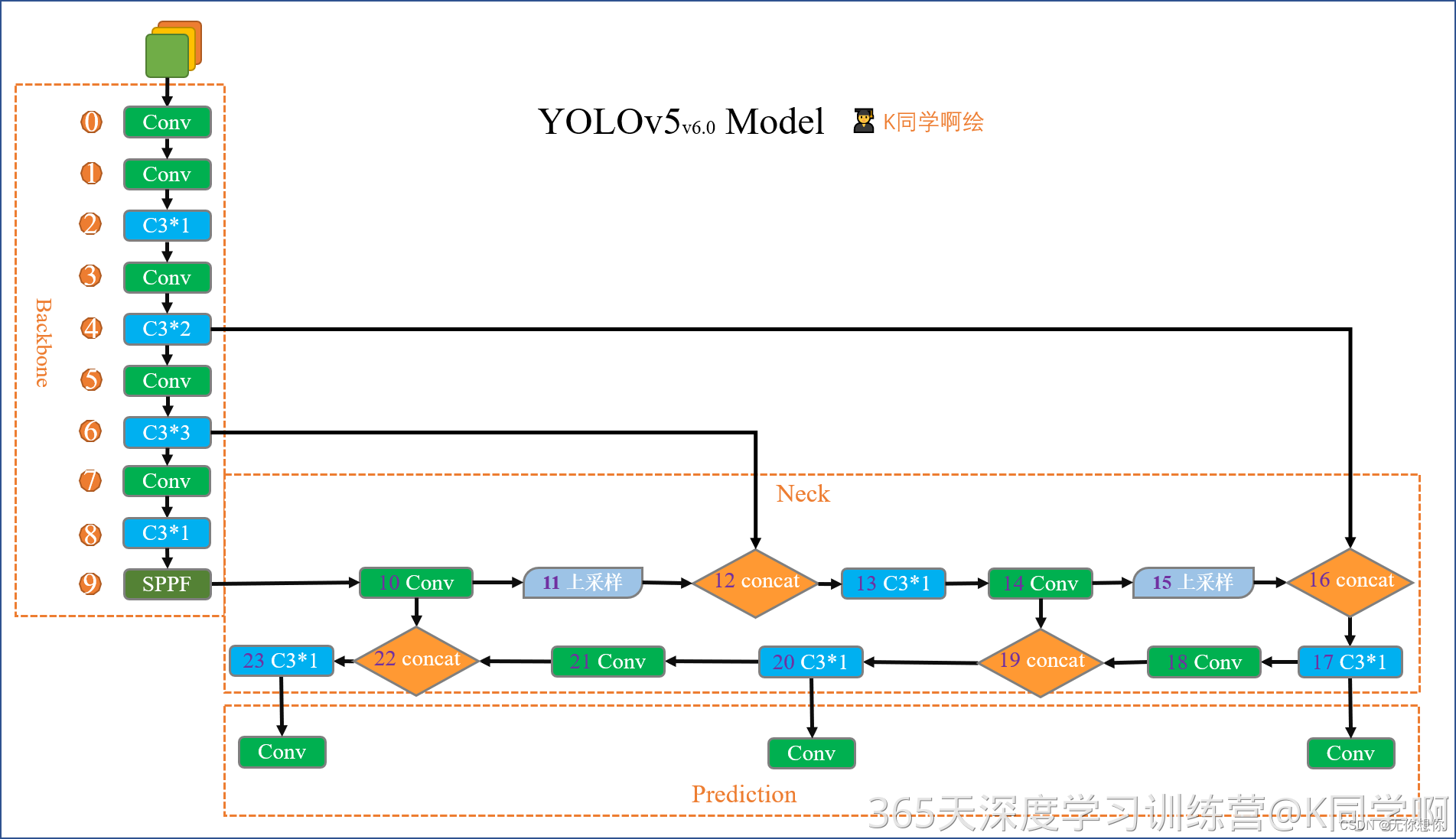
文件所在位置为D:\yolov5-master\yolov5-master\models\common.py
该文件是实现yolo算法各个模块的地方,由于yolov5版本的问题,官网上会实时更新,所以不同的模块会出现不同的版本
0.导入需要的包以及基本配置
import ast #抽象语法树
import contextlib #处理上下文管理器和with语句的使用程序
import json #数据交换格式
import math #包含数学函数的模块
import platform #获取操作系统信息模块
import warnings #避免报错出现问题
import zipfile #解压模块
from collections import OrderedDict, namedtuple
from copy import copy #数据拷贝模块
from pathlib import Path #Path将str转换成Path对象
from urllib.parse import urlparse
import cv2 #检查常见的模块
import numpy as np #numpy数组操作模块
import pandas as pd #panda数组操作模块
import requests #HTTP客户端库
import torch #pytorch深度学习框架
import torch.nn as nn #为神经网络设计的模块化接口
from IPython.display import display #显示图片
from PIL import Image #图片基础操作使用模块
from torch.cuda import amp #混合精度训练模块
from utils import TryExcept
from utils.dataloaders import exif_transpose, letterbox
from utils.general import (LOGGER, ROOT, Profile, check_requirements, check_suffix, check_version, colorstr,
increment_path, is_notebook, make_divisible, non_max_suppression, scale_boxes, xywh2xyxy,
xyxy2xywh, yaml_load)
from utils.plots import Annotator, colors, save_one_box
from utils.torch_utils import copy_attr, smart_inference_mode
1.基本组件
1.1 autopad
该模块根据输入的卷积核计算卷积模块所需的pad值,将会应用到Conv函数和Classify函数中
参数解释:
- k表示卷积核当中的kernel_size
- p表示自动计算需要的pad值(0填充)
def autopad(k, p=None, d=1): # kernel, padding, dilation
# Pad to 'same' shape outputs
if d > 1:
k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k] # actual kernel-size
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad 自动计算pad数
return p
v5当中只有两种卷积:
- 下采样卷积conv3*3 s=2 p=k//2=1
- features size 不变卷积conv1*1 s=1 p=k//2=1
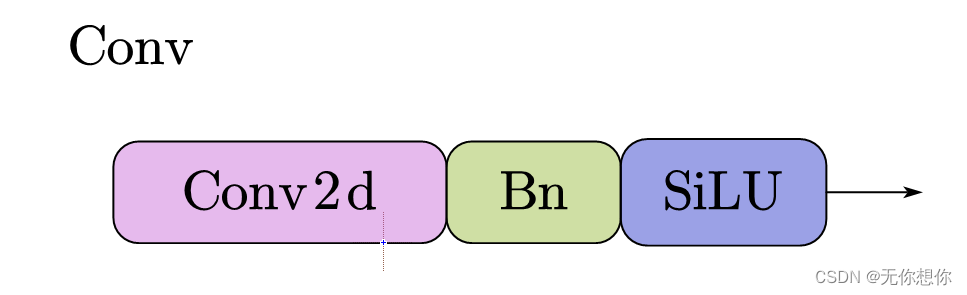
1.2 Conv
该函数为整个网络当中最基础的组件,由以下几个部分组成
Conv代码如下:
class Conv(nn.Module):
# Standard convolution with args(ch_in, ch_out, kernel, stride, padding, groups, dilation, activation)
"""
参数解释:
c1:输入的channel值
c2:输出的channel值
K:Kernel_size
s:卷积的stride步距
p:padding 利用autopad自动计算pad的padding数
g:group数=1就是普通卷积,>1就是深度可分离卷积
act:激活函数类型,True是SiLU()/Switch
False就是不使用激活函数
"""
default_act = nn.SiLU() # default activation
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True):
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
return self.act(self.bn(self.conv(x)))
def forward_fuse(self, x):
"""
融合conv+bn加快推理,用于测试和验证阶段
"""
return self.act(self.conv(x))
在接下来的多个模块当中(Focus,C3,SPP)都会进行调用该模块
DWConv模块
是由一个两部分卷积组成的网络,主要是为了降低卷积运算过程当中运算参数量
第一部分depthwiseconv是一个分通道的卷积
class DWConv(Conv):
# Depth-wise convolution
#参数的介绍已在conv当中解释
def __init__(self, c1, c2, k=1, s=1, d=1, act=True): # ch_in, ch_out, kernel, stride, dilation, activation
super().__init__(c1, c2, k, s, g=math.gcd(c1, c2), d=d, act=act)
class DWConvTranspose2d(nn.ConvTranspose2d):
#逆卷积操作
# Depth-wise transpose convolution
def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0): # ch_in, ch_out, kernel, stride, padding, padding_out
super().__init__(c1, c2, k, s, p1, p2, groups=math.gcd(c1, c2))
1.3TransformerLayer模块
这是一个PyTorch中的类,继承自nn.Module,它是用来实验Transformer模型当中的一个层,用于自然语言处理的深度学习模型
class TransformerLayer(nn.Module):
# Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
#删除LayerNorm层以获得更好的性能
"""
参数解释
c:表示输入特征的通道数
num_heads:表示多头注意力机制的头数
self.q:query查询,这是一个全连接层
self.k:keys注意力机制当中键的矩阵,这是一个全连接层
self.v:values注意力机制当中作为值的矩阵,这是一个全连接层
self.ma:使用Pytorch预定义的Multi-head Attention
"""
def __init__(self, c, num_heads):
super().__init__()
self.q = nn.Linear(c, c, bias=False)
self.k = nn.Linear(c, c, bias=False)
self.v = nn.Linear(c, c, bias=False)
self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
self.fc1 = nn.Linear(c, c, bias=False)#全连接层,在transformer编码层中做残差链接后跟随LayerNormalization
self.fc2 = nn.Linear(c, c, bias=False)#本地连接层,被用作残差连接
def forward(self, x):
x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
x = self.fc2(self.fc1(x)) + x
return x
class TransformerBlock(nn.Module):
# Vision Transformer https://arxiv.org/abs/2010.11929
"""
由若干个编码层叠加而成
num_layers:表示block当中包含的编码层数目
"""
def __init__(self, c1, c2, num_heads, num_layers):
super().__init__()
self.conv = None
if c1 != c2:
self.conv = Conv(c1, c2)
#输入大小不等于输出大小,则用卷积来将输入通道数c1映射到c2
self.linear = nn.Linear(c2, c2) # learnable position embedding
self.tr = nn.Sequential(*(TransformerLayer(c2, num_heads) for _ in range(num_layers)))
self.c2 = c2#block输出通道数
"""
def forward用于实现前向传播
"""
def forward(self, x):
if self.conv is not None:
x = self.conv(x)
b, _, w, h = x.shape
p = x.flatten(2).permute(2, 0, 1)
return self.tr(p + self.linear(p)).permute(1, 2, 0).reshape(b, self.c2, w, h)
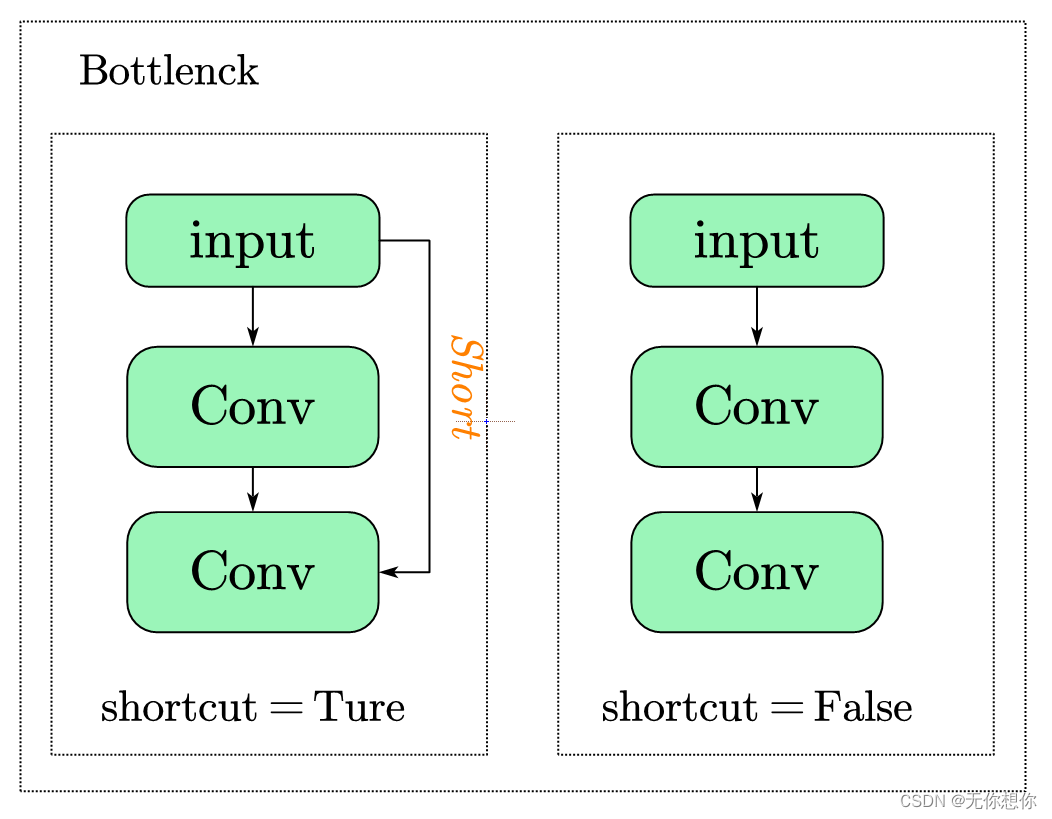
1.4 Bottleneck和BottleneckCSP
该类实现了CSP的瓶颈模块,是ResNet改进过程当中提出的一种结构
class Bottleneck(nn.Module):
# Standard bottleneck
"""
c1:表示输入通道数。
c2:表示输出通道数。
n:表示在每个CSP瓶颈中包含的标准瓶颈组数目。
shortcut:表示是否使用残差连接结构。
g:表示分组卷积(Group Convolution)的数目。
e:表示Expansion coefficient,扩张系数。
"""
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_, c2, 3, 1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x):
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
class BottleneckCSP(nn.Module):
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)
self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)
self.cv4 = Conv(2 * c_, c2, 1, 1)
self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3)
#batchNormalization作为一种正则化的方式,做到了抑制模型的过拟合
self.act = nn.SiLU()
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
#实现完整的CSP瓶颈模块当中包含n个标准瓶颈模块
def forward(self, x):#前向传播
"""
不同的卷积层进行特征提取,结果拼接,最后利用卷积层进行输出
"""
y1 = self.cv3(self.m(self.cv1(x)))
y2 = self.cv2(x)
return self.cv4(self.act(self.bn(torch.cat((y1, y2), 1))))
Bottleneck模型结构
1.5 CrossConv模块
该部分主要实现一种称为Cross Convolution Dowsample的网络层,主要的思想就是使用卷积交叉采用实现下采样
class CrossConv(nn.Module):
# Cross Convolution Downsample
def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
# ch_in, ch_out, kernel(核kernel的大小), stride(步长), groups, expansion, shortcut
super().__init__()
c_ = int(c2 * e) # hidden channels隐藏层的数目,也就是通过输出通道数c2和扩张系数e相乘得到中间的通道数
self.cv1 = Conv(c1, c_, (1, k), (1, s))
#使用(1, k)大小的卷积核实现行方向上的卷积,使用(1, s)大小的步长进行下采样
self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
#使用(k, 1)大小的卷积核实现列方向上的卷积,使用(s, 1)大小的步长进行下采样
self.add = shortcut and c1 == c2#残差连接
def forward(self, x):
"""
- 通过两个卷积层实现交叉卷积下采样操作。
- 如果add是True,就使用残差连接将输入张量加到输出上得到最终结果。
- 否则就直接将卷积操作的输出作为输出返回。
"""
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
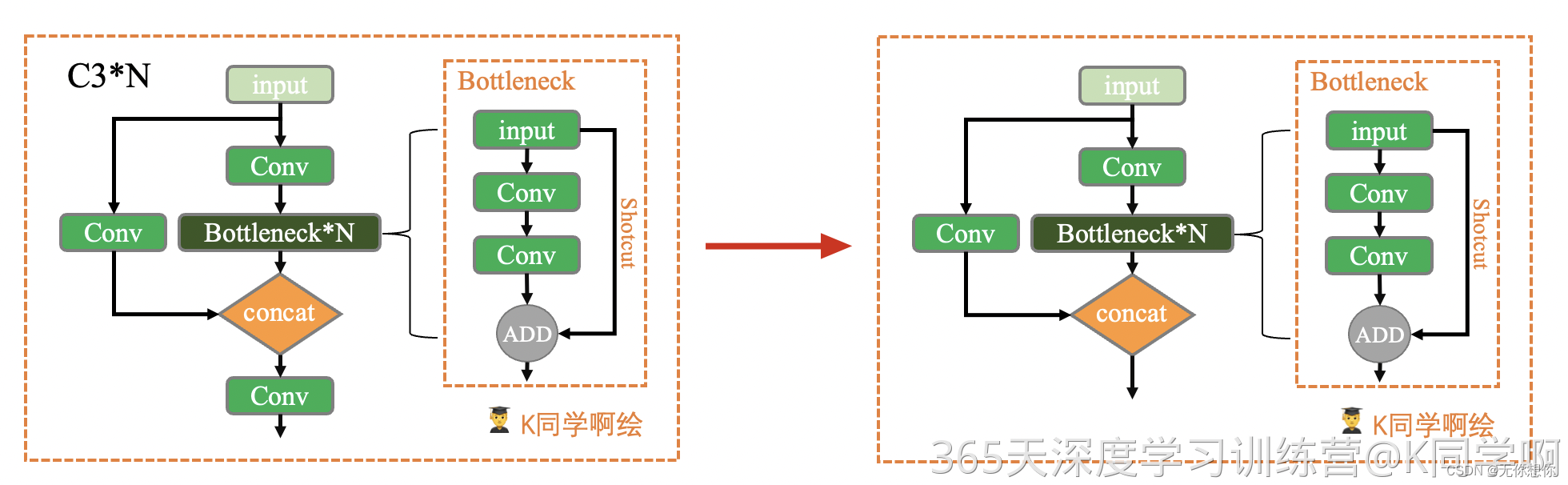
1.6 C3模块
该模块主要是一种简化版的BottleneckCSP,因为除了Bottleneck以外只有3个卷积,可以减少参数,这样的方法更加简单,快速的得到特征
class C3(nn.Module):
# CSP Bottleneck with 3 convolutions
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)#实现通道数的降维与升维
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
def forward(self, x):
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
基于C3的改进
该部分代码主要是在C3代码原有的基础上的方法改进,在原有的基础上添加cross-convolutions,SPP等
class C3x(C3):
# C3 module with cross-convolutions
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e)
self.m = nn.Sequential(*(CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)))
class C3TR(C3):
# C3 module with TransformerBlock()
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e)
self.m = TransformerBlock(c_, c_, 4, n)
class C3SPP(C3):
# C3 module with SPP()
def __init__(self, c1, c2, k=(5, 9, 13), n=1, shortcut=True, g=1, e=0.5):
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e)
self.m = SPP(c_, c_, k)
class C3Ghost(C3):
"""
在C3的情况下进行一个改进
super().__init__(c1, c2, n, shortcut, g, e)继承了C3模块的初始化方法
self.m = nn.Sequential(*(GhostBottleneck(c_, c_) for _ in range(n))):使用GhostBottleneck替换原来序列当中的标准Bottleneck
Ghost Bottleneck是一种削减卷积计算量的方法
"""
# C3 module with GhostBottleneck()
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e) # hidden channels
self.m = nn.Sequential(*(GhostBottleneck(c_, c_) for _ in range(n)))
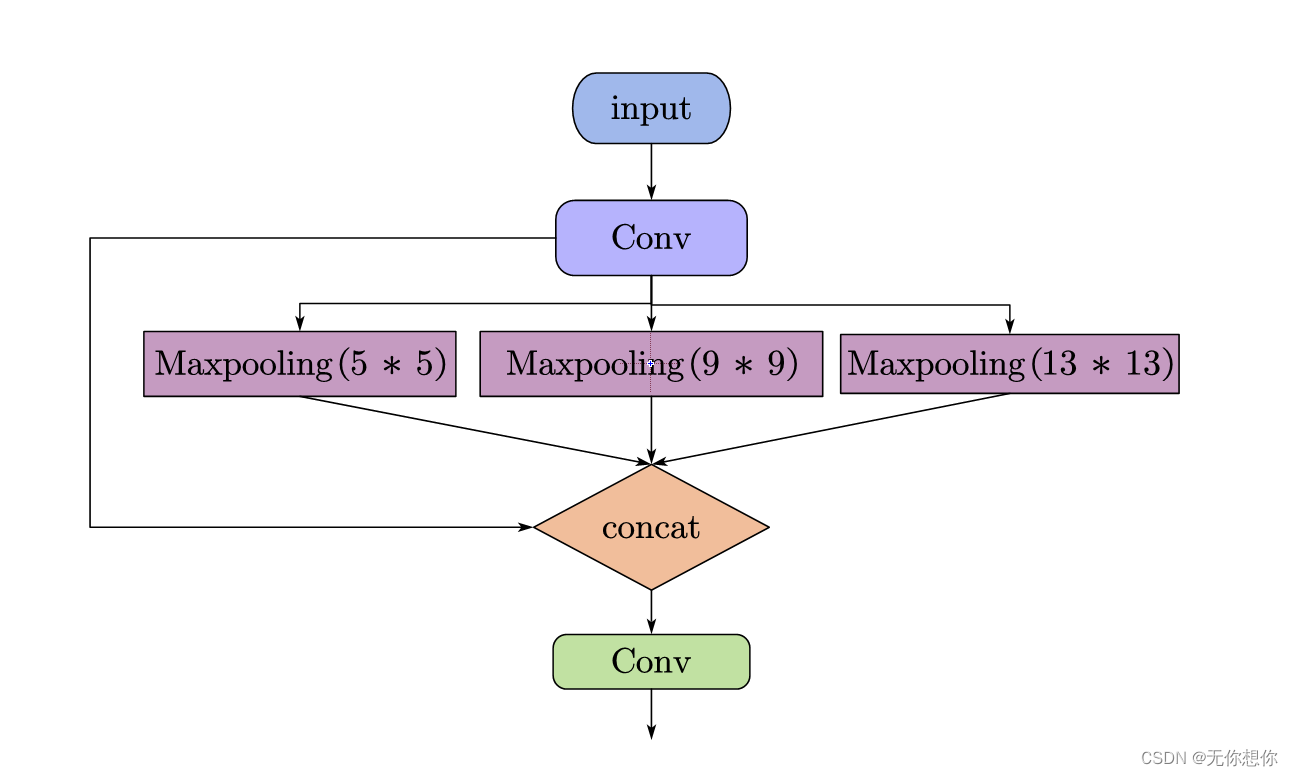
1.7SPP
空间金字塔池化(Spatial Pyramid Pooling,SPP)是目标检测算法当中对高层特征进行多尺度池化以及增加感受野的重要措施之一.
经典的空间池化模块首先将输入的卷积特征分成不同的size,然后每个size提取固定维度的特征最后将这些拼接成一个固定维度
SPP模块的具体结构如下:
class SPP(nn.Module):
# Spatial Pyramid Pooling (SPP) layer https://arxiv.org/abs/1406.4729
"""
c1:SPP模块输入channel
c2:SPP模块输出channel
k:保存三个maxpool的卷积核大小,默认为(5,9,13)
"""
def __init__(self, c1, c2, k=(5, 9, 13)):
super().__init__()
c_ = c1 // 2 # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
#一共有(len(k)+1)个输出
#使用另一个卷积层恢复通道数,并连接一个池化层进行多尺度特征提取
self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
#存储不同大小的最大池化层
def forward(self, x):#前向传播
x = self.cv1(x)
with warnings.catch_warnings():
warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
class SPPF(nn.Module):
# Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
super().__init__()
c_ = c1 // 2 # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_ * 4, c2, 1, 1)
#使用另一个卷积层恢复通道数,并将四个不同尺度的池化结果拼接在一起
self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
#用于spp的最大池化层
def forward(self, x):
x = self.cv1(x)
with warnings.catch_warnings():
warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
y1 = self.m(x)
y2 = self.m(y1)
return self.cv2(torch.cat((x, y1, y2, self.m(y2)), 1))
1.8Focus模块
目的是为了减少浮点数以及提高速度,本质就像是将图片进行切片,将输入的张量沿着宽高方向进行二次采样,然后这些子块沿着通道维度进行拼接
class Focus(nn.Module):
# Focus wh information into c-space
"""
c1:表示输入通道数。
c2:表示输出通道数。
k:表示卷积核的大小。
s:表示卷积的步长。
p:表示卷积的填充。
g:表示分组卷积(Group Convolution)的数目。
act:表示是否使用激活函数。
"""
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
super().__init__()
self.conv = Conv(c1 * 4, c2, k, s, p, g, act=act)
# self.contract = Contract(gain=2)
def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
return self.conv(torch.cat((x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]), 1))
# return self.conv(self.contract(x))
1.9 Concat模块
该函数时是将自身按照某一个维度进行concat,实现多个张量在指定维度上进行拼接,常用于合并前后两个feature map
class Concat(nn.Module):
# Concatenate a list of tensors along dimension
def __init__(self, dimension=1):
super().__init__()
self.d = dimension
def forward(self, x):
return torch.cat(x, self.d)
1.10 Contract和Expand
这两个函数用于改变feature map维度
- Contract改变输入特征的
shape,将feature map的w和h维度的数据收缩到channel维度上放大 - Expand函数改变输入特征的
shape,与Contract的操作相反
class Contract(nn.Module):
# Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
def __init__(self, gain=2):
super().__init__()
self.gain = gain
def forward(self, x):
b, c, h, w = x.size() # assert (h / s == 0) and (W / s == 0), 'Indivisible gain'
s = self.gain
x = x.view(b, c, h // s, s, w // s, s) # x(1,64,40,2,40,2)
x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
return x.view(b, c * s * s, h // s, w // s) # x(1,256,40,40)
class Expand(nn.Module):
# Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
def __init__(self, gain=2):
super().__init__()
self.gain = gain
def forward(self, x):
b, c, h, w = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
s = self.gain
x = x.view(b, s, s, c // s ** 2, h, w) # x(1,2,2,16,80,80)
x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
return x.view(b, c // s ** 2, h * s, w * s) # x(1,16,160,160)
1.11 拓展补充
这一部分主要都是和前面的内容相联系
class GhostConv(nn.Module):
# Ghost Convolution https://github.com/huawei-noah/ghostnet
def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
super().__init__()
c_ = c2 // 2 # hidden channels
self.cv1 = Conv(c1, c_, k, s, None, g, act=act)
self.cv2 = Conv(c_, c_, 5, 1, None, c_, act=act)
def forward(self, x):
y = self.cv1(x)
return torch.cat((y, self.cv2(y)), 1)
class GhostBottleneck(nn.Module):
# Ghost Bottleneck https://github.com/huawei-noah/ghostnet
def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
super().__init__()
c_ = c2 // 2
self.conv = nn.Sequential(
GhostConv(c1, c_, 1, 1), # pw
DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False), Conv(c1, c2, 1, 1,
act=False)) if s == 2 else nn.Identity()
def forward(self, x):
return self.conv(x) + self.shortcut(x)
2.重要内容
2.1 非极大抑制(NMS)
该操作主要的内容是为了在检测过程当中如果出现多个检测结果的框时应该如何尽量除去多余的检测框,这样的好处可以在检测结果当中更加清晰明了,尤其是在检测目标过多的时候十分有用
DetectMultiBackend
YOLOv5多后端类,用于各种后端上的python推理
在YOLOv5代码中,DetectMultiBackend是一个后处理类,用于对网络输出进行解析和处理。具体来说,它会对YOLOv5网络输出的约束设备框、类别和置信度三个结果张量进行解析和处理,得到最终的检测结果。
这个类的工作可以分为两个主要部分:非极大值抑制(NMS)和解码起始/结束坐标。具体来说,它首先对置信度阈值以下的检测结果进行过滤,然后根据类别置信度和框置信度计算综合得分。随后,会在同一类别内应用NMS技术,以消除重复的检测结果。最后,会在解码的坐标上进行还原,从而得到检测结果的真实位置和尺寸。
总体来说,DetectMultiBackend的作用是对YOLOv5网络的输出进行处理,得到最终的检测结果,将其借助于该类的方法返回。
class DetectMultiBackend(nn.Module):
# YOLOv5 MultiBackend class for python inference on various backends
def __init__(self, weights='yolov5s.pt', device=torch.device('cpu'), dnn=False, data=None, fp16=False, fuse=True):
# Usage:
# PyTorch: weights = *.pt
# TorchScript: *.torchscript
# ONNX Runtime: *.onnx
# ONNX OpenCV DNN: *.onnx --dnn
# OpenVINO: *_openvino_model
# CoreML: *.mlmodel
# TensorRT: *.engine
# TensorFlow SavedModel: *_saved_model
# TensorFlow GraphDef: *.pb
# TensorFlow Lite: *.tflite
# TensorFlow Edge TPU: *_edgetpu.tflite
# PaddlePaddle: *_paddle_model
from models.experimental import attempt_download, attempt_load # scoped to avoid circular import
super().__init__()
w = str(weights[0] if isinstance(weights, list) else weights)
pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs, paddle, triton = self._model_type(w)
fp16 &= pt or jit or onnx or engine # FP16
nhwc = coreml or saved_model or pb or tflite or edgetpu # BHWC formats (vs torch BCWH)
stride = 32 # default stride
cuda = torch.cuda.is_available() and device.type != 'cpu' # use CUDA
if not (pt or triton):
w = attempt_download(w) # download if not local
if pt: # PyTorch
model = attempt_load(weights if isinstance(weights, list) else w, device=device, inplace=True, fuse=fuse)
stride = max(int(model.stride.max()), 32) # model stride
names = model.module.names if hasattr(model, 'module') else model.names # get class names
model.half() if fp16 else model.float()
self.model = model # explicitly assign for to(), cpu(), cuda(), half()
elif jit: # TorchScript
LOGGER.info(f'Loading {w} for TorchScript inference...')
extra_files = {'config.txt': ''} # model metadata
model = torch.jit.load(w, _extra_files=extra_files, map_location=device)
model.half() if fp16 else model.float()
if extra_files['config.txt']: # load metadata dict
d = json.loads(extra_files['config.txt'],
object_hook=lambda d: {int(k) if k.isdigit() else k: v
for k, v in d.items()})
stride, names = int(d['stride']), d['names']
elif dnn: # ONNX OpenCV DNN
LOGGER.info(f'Loading {w} for ONNX OpenCV DNN inference...')
check_requirements('opencv-python>=4.5.4')
net = cv2.dnn.readNetFromONNX(w)
elif onnx: # ONNX Runtime
LOGGER.info(f'Loading {w} for ONNX Runtime inference...')
check_requirements(('onnx', 'onnxruntime-gpu' if cuda else 'onnxruntime'))
import onnxruntime
providers = ['CUDAExecutionProvider', 'CPUExecutionProvider'] if cuda else ['CPUExecutionProvider']
session = onnxruntime.InferenceSession(w, providers=providers)
output_names = [x.name for x in session.get_outputs()]
meta = session.get_modelmeta().custom_metadata_map # metadata
if 'stride' in meta:
stride, names = int(meta['stride']), eval(meta['names'])
elif xml: # OpenVINO
LOGGER.info(f'Loading {w} for OpenVINO inference...')
check_requirements('openvino') # requires openvino-dev: https://pypi.org/project/openvino-dev/
from openvino.runtime import Core, Layout, get_batch
ie = Core()
if not Path(w).is_file(): # if not *.xml
w = next(Path(w).glob('*.xml')) # get *.xml file from *_openvino_model dir
network = ie.read_model(model=w, weights=Path(w).with_suffix('.bin'))
if network.get_parameters()[0].get_layout().empty:
network.get_parameters()[0].set_layout(Layout('NCHW'))
batch_dim = get_batch(network)
if batch_dim.is_static:
batch_size = batch_dim.get_length()
executable_network = ie.compile_model(network, device_name='CPU') # device_name="MYRIAD" for Intel NCS2
stride, names = self._load_metadata(Path(w).with_suffix('.yaml')) # load metadata
elif engine: # TensorRT
LOGGER.info(f'Loading {w} for TensorRT inference...')
import tensorrt as trt # https://developer.nvidia.com/nvidia-tensorrt-download
check_version(trt.__version__, '7.0.0', hard=True) # require tensorrt>=7.0.0
if device.type == 'cpu':
device = torch.device('cuda:0')
Binding = namedtuple('Binding', ('name', 'dtype', 'shape', 'data', 'ptr'))
logger = trt.Logger(trt.Logger.INFO)
with open(w, 'rb') as f, trt.Runtime(logger) as runtime:
model = runtime.deserialize_cuda_engine(f.read())
context = model.create_execution_context()
bindings = OrderedDict()
output_names = []
fp16 = False # default updated below
dynamic = False
for i in range(model.num_bindings):
name = model.get_binding_name(i)
dtype = trt.nptype(model.get_binding_dtype(i))
if model.binding_is_input(i):
if -1 in tuple(model.get_binding_shape(i)): # dynamic
dynamic = True
context.set_binding_shape(i, tuple(model.get_profile_shape(0, i)[2]))
if dtype == np.float16:
fp16 = True
else: # output
output_names.append(name)
shape = tuple(context.get_binding_shape(i))
im = torch.from_numpy(np.empty(shape, dtype=dtype)).to(device)
bindings[name] = Binding(name, dtype, shape, im, int(im.data_ptr()))
binding_addrs = OrderedDict((n, d.ptr) for n, d in bindings.items())
batch_size = bindings['images'].shape[0] # if dynamic, this is instead max batch size
elif coreml: # CoreML
LOGGER.info(f'Loading {w} for CoreML inference...')
import coremltools as ct
model = ct.models.MLModel(w)
elif saved_model: # TF SavedModel
LOGGER.info(f'Loading {w} for TensorFlow SavedModel inference...')
import tensorflow as tf
keras = False # assume TF1 saved_model
model = tf.keras.models.load_model(w) if keras else tf.saved_model.load(w)
elif pb: # GraphDef https://www.tensorflow.org/guide/migrate#a_graphpb_or_graphpbtxt
LOGGER.info(f'Loading {w} for TensorFlow GraphDef inference...')
import tensorflow as tf
def wrap_frozen_graph(gd, inputs, outputs):
x = tf.compat.v1.wrap_function(lambda: tf.compat.v1.import_graph_def(gd, name=''), []) # wrapped
ge = x.graph.as_graph_element
return x.prune(tf.nest.map_structure(ge, inputs), tf.nest.map_structure(ge, outputs))
def gd_outputs(gd):
name_list, input_list = [], []
for node in gd.node: # tensorflow.core.framework.node_def_pb2.NodeDef
name_list.append(node.name)
input_list.extend(node.input)
return sorted(f'{x}:0' for x in list(set(name_list) - set(input_list)) if not x.startswith('NoOp'))
gd = tf.Graph().as_graph_def() # TF GraphDef
with open(w, 'rb') as f:
gd.ParseFromString(f.read())
frozen_func = wrap_frozen_graph(gd, inputs='x:0', outputs=gd_outputs(gd))
elif tflite or edgetpu: # https://www.tensorflow.org/lite/guide/python#install_tensorflow_lite_for_python
try: # https://coral.ai/docs/edgetpu/tflite-python/#update-existing-tf-lite-code-for-the-edge-tpu
from tflite_runtime.interpreter import Interpreter, load_delegate
except ImportError:
import tensorflow as tf
Interpreter, load_delegate = tf.lite.Interpreter, tf.lite.experimental.load_delegate,
if edgetpu: # TF Edge TPU https://coral.ai/software/#edgetpu-runtime
LOGGER.info(f'Loading {w} for TensorFlow Lite Edge TPU inference...')
delegate = {
'Linux': 'libedgetpu.so.1',
'Darwin': 'libedgetpu.1.dylib',
'Windows': 'edgetpu.dll'}[platform.system()]
interpreter = Interpreter(model_path=w, experimental_delegates=[load_delegate(delegate)])
else: # TFLite
LOGGER.info(f'Loading {w} for TensorFlow Lite inference...')
interpreter = Interpreter(model_path=w) # load TFLite model
interpreter.allocate_tensors() # allocate
input_details = interpreter.get_input_details() # inputs
output_details = interpreter.get_output_details() # outputs
# load metadata
with contextlib.suppress(zipfile.BadZipFile):
with zipfile.ZipFile(w, 'r') as model:
meta_file = model.namelist()[0]
meta = ast.literal_eval(model.read(meta_file).decode('utf-8'))
stride, names = int(meta['stride']), meta['names']
elif tfjs: # TF.js
raise NotImplementedError('ERROR: YOLOv5 TF.js inference is not supported')
elif paddle: # PaddlePaddle
LOGGER.info(f'Loading {w} for PaddlePaddle inference...')
check_requirements('paddlepaddle-gpu' if cuda else 'paddlepaddle')
import paddle.inference as pdi
if not Path(w).is_file(): # if not *.pdmodel
w = next(Path(w).rglob('*.pdmodel')) # get *.pdmodel file from *_paddle_model dir
weights = Path(w).with_suffix('.pdiparams')
config = pdi.Config(str(w), str(weights))
if cuda:
config.enable_use_gpu(memory_pool_init_size_mb=2048, device_id=0)
predictor = pdi.create_predictor(config)
input_handle = predictor.get_input_handle(predictor.get_input_names()[0])
output_names = predictor.get_output_names()
elif triton: # NVIDIA Triton Inference Server
LOGGER.info(f'Using {w} as Triton Inference Server...')
check_requirements('tritonclient[all]')
from utils.triton import TritonRemoteModel
model = TritonRemoteModel(url=w)
nhwc = model.runtime.startswith('tensorflow')
else:
raise NotImplementedError(f'ERROR: {w} is not a supported format')
# class names
if 'names' not in locals():
names = yaml_load(data)['names'] if data else {i: f'class{i}' for i in range(999)}
if names[0] == 'n01440764' and len(names) == 1000: # ImageNet
names = yaml_load(ROOT / 'data/ImageNet.yaml')['names'] # human-readable names
self.__dict__.update(locals()) # assign all variables to self
def forward(self, im, augment=False, visualize=False):
# YOLOv5 MultiBackend inference
b, ch, h, w = im.shape # batch, channel, height, width
if self.fp16 and im.dtype != torch.float16:
im = im.half() # to FP16
if self.nhwc:
im = im.permute(0, 2, 3, 1) # torch BCHW to numpy BHWC shape(1,320,192,3)
if self.pt: # PyTorch
y = self.model(im, augment=augment, visualize=visualize) if augment or visualize else self.model(im)
elif self.jit: # TorchScript
y = self.model(im)
elif self.dnn: # ONNX OpenCV DNN
im = im.cpu().numpy() # torch to numpy
self.net.setInput(im)
y = self.net.forward()
elif self.onnx: # ONNX Runtime
im = im.cpu().numpy() # torch to numpy
y = self.session.run(self.output_names, {self.session.get_inputs()[0].name: im})
elif self.xml: # OpenVINO
im = im.cpu().numpy() # FP32
y = list(self.executable_network([im]).values())
elif self.engine: # TensorRT
if self.dynamic and im.shape != self.bindings['images'].shape:
i = self.model.get_binding_index('images')
self.context.set_binding_shape(i, im.shape) # reshape if dynamic
self.bindings['images'] = self.bindings['images']._replace(shape=im.shape)
for name in self.output_names:
i = self.model.get_binding_index(name)
self.bindings[name].data.resize_(tuple(self.context.get_binding_shape(i)))
s = self.bindings['images'].shape
assert im.shape == s, f"input size {im.shape} {'>' if self.dynamic else 'not equal to'} max model size {s}"
self.binding_addrs['images'] = int(im.data_ptr())
self.context.execute_v2(list(self.binding_addrs.values()))
y = [self.bindings[x].data for x in sorted(self.output_names)]
elif self.coreml: # CoreML
im = im.cpu().numpy()
im = Image.fromarray((im[0] * 255).astype('uint8'))
# im = im.resize((192, 320), Image.ANTIALIAS)
y = self.model.predict({'image': im}) # coordinates are xywh normalized
if 'confidence' in y:
box = xywh2xyxy(y['coordinates'] * [[w, h, w, h]]) # xyxy pixels
conf, cls = y['confidence'].max(1), y['confidence'].argmax(1).astype(np.float)
y = np.concatenate((box, conf.reshape(-1, 1), cls.reshape(-1, 1)), 1)
else:
y = list(reversed(y.values())) # reversed for segmentation models (pred, proto)
elif self.paddle: # PaddlePaddle
im = im.cpu().numpy().astype(np.float32)
self.input_handle.copy_from_cpu(im)
self.predictor.run()
y = [self.predictor.get_output_handle(x).copy_to_cpu() for x in self.output_names]
elif self.triton: # NVIDIA Triton Inference Server
y = self.model(im)
else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)
im = im.cpu().numpy()
if self.saved_model: # SavedModel
y = self.model(im, training=False) if self.keras else self.model(im)
elif self.pb: # GraphDef
y = self.frozen_func(x=self.tf.constant(im))
else: # Lite or Edge TPU
input = self.input_details[0]
int8 = input['dtype'] == np.uint8 # is TFLite quantized uint8 model
if int8:
scale, zero_point = input['quantization']
im = (im / scale + zero_point).astype(np.uint8) # de-scale
self.interpreter.set_tensor(input['index'], im)
self.interpreter.invoke()
y = []
for output in self.output_details:
x = self.interpreter.get_tensor(output['index'])
if int8:
scale, zero_point = output['quantization']
x = (x.astype(np.float32) - zero_point) * scale # re-scale
y.append(x)
y = [x if isinstance(x, np.ndarray) else x.numpy() for x in y]
y[0][..., :4] *= [w, h, w, h] # xywh normalized to pixels
if isinstance(y, (list, tuple)):
return self.from_numpy(y[0]) if len(y) == 1 else [self.from_numpy(x) for x in y]
else:
return self.from_numpy(y)
def from_numpy(self, x):
return torch.from_numpy(x).to(self.device) if isinstance(x, np.ndarray) else x
def warmup(self, imgsz=(1, 3, 640, 640)):
# Warmup model by running inference once
warmup_types = self.pt, self.jit, self.onnx, self.engine, self.saved_model, self.pb, self.triton
if any(warmup_types) and (self.device.type != 'cpu' or self.triton):
im = torch.empty(*imgsz, dtype=torch.half if self.fp16 else torch.float, device=self.device) # input
for _ in range(2 if self.jit else 1): #
self.forward(im) # warmup
@staticmethod
def _model_type(p='path/to/model.pt'):
# Return model type from model path, i.e. path='path/to/model.onnx' -> type=onnx
# types = [pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs, paddle]
from export import export_formats
from utils.downloads import is_url
sf = list(export_formats().Suffix) # export suffixes
if not is_url(p, check=False):
check_suffix(p, sf) # checks
url = urlparse(p) # if url may be Triton inference server
types = [s in Path(p).name for s in sf]
types[8] &= not types[9] # tflite &= not edgetpu
triton = not any(types) and all([any(s in url.scheme for s in ['http', 'grpc']), url.netloc])
return types + [triton]
@staticmethod
def _load_metadata(f=Path('path/to/meta.yaml')):
# Load metadata from meta.yaml if it exists
if f.exists():
d = yaml_load(f)
return d['stride'], d['names'] # assign stride, names
return None, None
2.2 AutoShape
该模块是一个模型拓展块,用于给模型封装成包含前处理,推理,后处理的模块
class AutoShape(nn.Module):
# YOLOv5 input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS
conf = 0.25 # NMS confidence threshold
iou = 0.45 # NMS IoU threshold
agnostic = False # NMS class-agnostic
multi_label = False # NMS multiple labels per box
classes = None # (optional list) filter by class, i.e. = [0, 15, 16] for COCO persons, cats and dogs
max_det = 1000 # maximum number of detections per image
amp = False # Automatic Mixed Precision (AMP) inference
def __init__(self, model, verbose=True):
super().__init__()
if verbose:
LOGGER.info('Adding AutoShape... ')
copy_attr(self, model, include=('yaml', 'nc', 'hyp', 'names', 'stride', 'abc'), exclude=()) # copy attributes
self.dmb = isinstance(model, DetectMultiBackend) # DetectMultiBackend() instance
self.pt = not self.dmb or model.pt # PyTorch model
self.model = model.eval()
if self.pt:
m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()
m.inplace = False # Detect.inplace=False for safe multithread inference
m.export = True # do not output loss values
def _apply(self, fn):
# Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers
self = super()._apply(fn)
if self.pt:
m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()
m.stride = fn(m.stride)
m.grid = list(map(fn, m.grid))
if isinstance(m.anchor_grid, list):
m.anchor_grid = list(map(fn, m.anchor_grid))
return self
@smart_inference_mode()
def forward(self, ims, size=640, augment=False, profile=False):
# Inference from various sources. For size(height=640, width=1280), RGB images example inputs are:
# file: ims = 'data/images/zidane.jpg' # str or PosixPath
# URI: = 'https://ultralytics.com/images/zidane.jpg'
# OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)
# PIL: = Image.open('image.jpg') or ImageGrab.grab() # HWC x(640,1280,3)
# numpy: = np.zeros((640,1280,3)) # HWC
# torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)
# multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images
dt = (Profile(), Profile(), Profile())
with dt[0]:
if isinstance(size, int): # expand
size = (size, size)
p = next(self.model.parameters()) if self.pt else torch.empty(1, device=self.model.device) # param
autocast = self.amp and (p.device.type != 'cpu') # Automatic Mixed Precision (AMP) inference
if isinstance(ims, torch.Tensor): # torch
with amp.autocast(autocast):
return self.model(ims.to(p.device).type_as(p), augment=augment) # inference
# Pre-process
n, ims = (len(ims), list(ims)) if isinstance(ims, (list, tuple)) else (1, [ims]) # number, list of images
shape0, shape1, files = [], [], [] # image and inference shapes, filenames
for i, im in enumerate(ims):
f = f'image{i}' # filename
if isinstance(im, (str, Path)): # filename or uri
im, f = Image.open(requests.get(im, stream=True).raw if str(im).startswith('http') else im), im
im = np.asarray(exif_transpose(im))
elif isinstance(im, Image.Image): # PIL Image
im, f = np.asarray(exif_transpose(im)), getattr(im, 'filename', f) or f
files.append(Path(f).with_suffix('.jpg').name)
if im.shape[0] < 5: # image in CHW
im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)
im = im[..., :3] if im.ndim == 3 else cv2.cvtColor(im, cv2.COLOR_GRAY2BGR) # enforce 3ch input
s = im.shape[:2] # HWC
shape0.append(s) # image shape
g = max(size) / max(s) # gain
shape1.append([int(y * g) for y in s])
ims[i] = im if im.data.contiguous else np.ascontiguousarray(im) # update
shape1 = [make_divisible(x, self.stride) for x in np.array(shape1).max(0)] # inf shape
x = [letterbox(im, shape1, auto=False)[0] for im in ims] # pad
x = np.ascontiguousarray(np.array(x).transpose((0, 3, 1, 2))) # stack and BHWC to BCHW
x = torch.from_numpy(x).to(p.device).type_as(p) / 255 # uint8 to fp16/32
with amp.autocast(autocast):
# Inference
with dt[1]:
y = self.model(x, augment=augment) # forward
# Post-process
with dt[2]:
y = non_max_suppression(y if self.dmb else y[0],
self.conf,
self.iou,
self.classes,
self.agnostic,
self.multi_label,
max_det=self.max_det) # NMS
for i in range(n):
scale_boxes(shape1, y[i][:, :4], shape0[i])
return Detections(ims, y, files, dt, self.names, x.shape)
2.3 Detections
用于推理结果检测类
class Detections:
# YOLOv5 detections class for inference results
def __init__(self, ims, pred, files, times=(0, 0, 0), names=None, shape=None):
super().__init__()
d = pred[0].device # device
gn = [torch.tensor([*(im.shape[i] for i in [1, 0, 1, 0]), 1, 1], device=d) for im in ims] # normalizations
self.ims = ims # list of images as numpy arrays
self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)
self.names = names # class names
self.files = files # image filenames
self.times = times # profiling times
self.xyxy = pred # xyxy pixels
self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels
self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized
self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized
self.n = len(self.pred) # number of images (batch size)
self.t = tuple(x.t / self.n * 1E3 for x in times) # timestamps (ms)
self.s = tuple(shape) # inference BCHW shape
def _run(self, pprint=False, show=False, save=False, crop=False, render=False, labels=True, save_dir=Path('')):
s, crops = '', []
for i, (im, pred) in enumerate(zip(self.ims, self.pred)):
s += f'\nimage {i + 1}/{len(self.pred)}: {im.shape[0]}x{im.shape[1]} ' # string
if pred.shape[0]:
for c in pred[:, -1].unique():
n = (pred[:, -1] == c).sum() # detections per class
s += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
s = s.rstrip(', ')
if show or save or render or crop:
annotator = Annotator(im, example=str(self.names))
for *box, conf, cls in reversed(pred): # xyxy, confidence, class
label = f'{self.names[int(cls)]} {conf:.2f}'
if crop:
file = save_dir / 'crops' / self.names[int(cls)] / self.files[i] if save else None
crops.append({
'box': box,
'conf': conf,
'cls': cls,
'label': label,
'im': save_one_box(box, im, file=file, save=save)})
else: # all others
annotator.box_label(box, label if labels else '', color=colors(cls))
im = annotator.im
else:
s += '(no detections)'
im = Image.fromarray(im.astype(np.uint8)) if isinstance(im, np.ndarray) else im # from np
if show:
display(im) if is_notebook() else im.show(self.files[i])
if save:
f = self.files[i]
im.save(save_dir / f) # save
if i == self.n - 1:
LOGGER.info(f"Saved {self.n} image{'s' * (self.n > 1)} to {colorstr('bold', save_dir)}")
if render:
self.ims[i] = np.asarray(im)
if pprint:
s = s.lstrip('\n')
return f'{s}\nSpeed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {self.s}' % self.t
if crop:
if save:
LOGGER.info(f'Saved results to {save_dir}\n')
return crops
@TryExcept('Showing images is not supported in this environment')
def show(self, labels=True):
self._run(show=True, labels=labels) # show results
def save(self, labels=True, save_dir='runs/detect/exp', exist_ok=False):
save_dir = increment_path(save_dir, exist_ok, mkdir=True) # increment save_dir
self._run(save=True, labels=labels, save_dir=save_dir) # save results
def crop(self, save=True, save_dir='runs/detect/exp', exist_ok=False):
save_dir = increment_path(save_dir, exist_ok, mkdir=True) if save else None
return self._run(crop=True, save=save, save_dir=save_dir) # crop results
def render(self, labels=True):
self._run(render=True, labels=labels) # render results
return self.ims
def pandas(self):
# return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])
new = copy(self) # return copy
ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns
cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns
for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):
a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update
setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])
return new
def tolist(self):
# return a list of Detections objects, i.e. 'for result in results.tolist():'
r = range(self.n) # iterable
x = [Detections([self.ims[i]], [self.pred[i]], [self.files[i]], self.times, self.names, self.s) for i in r]
# for d in x:
# for k in ['ims', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:
# setattr(d, k, getattr(d, k)[0]) # pop out of list
return x
def print(self):
LOGGER.info(self.__str__())
def __len__(self): # override len(results)
return self.n
def __str__(self): # override print(results)
return self._run(pprint=True) # print results
def __repr__(self):
return f'YOLOv5 {self.__class__} instance\n' + self.__str__()
2.4 Photo
本内容实现了一个用于分割模型的YOLOv5 mask Proto模块
class Proto(nn.Module):
# YOLOv5 mask Proto module for segmentation models
"""
c1表示输入通道数。
c_表示用于生成proto的通道数。
c2表示输出分割掩模的通道数。
"""
def __init__(self, c1, c_=256, c2=32): # ch_in, number of protos, number of masks
super().__init__()
self.cv1 = Conv(c1, c_, k=3)
self.upsample = nn.Upsample(scale_factor=2, mode='nearest')
self.cv2 = Conv(c_, c_, k=3)
self.cv3 = Conv(c_, c2)
def forward(self, x):
return self.cv3(self.cv2(self.upsample(self.cv1(x))))
2.5 Classify
这是一个二级分类模块,比如说要进行车牌的识别,就需要先对车牌上的字进行识别
class Classify(nn.Module):
# YOLOv5 classification head, i.e. x(b,c1,20,20) to x(b,c2)
def __init__(self,
c1,
c2,
k=1,
s=1,
p=None,
g=1,
dropout_p=0.0): # ch_in, ch_out, kernel, stride, padding, groups, dropout probability
super().__init__()
c_ = 1280 # efficientnet_b0 size
self.conv = Conv(c1, c_, k, s, autopad(k, p), g)
self.pool = nn.AdaptiveAvgPool2d(1) # to x(b,c_,1,1)
self.drop = nn.Dropout(p=dropout_p, inplace=True)
self.linear = nn.Linear(c_, c2) # to x(b,c2)
def forward(self, x):
if isinstance(x, list):
x = torch.cat(x, 1)
return self.linear(self.drop(self.pool(self.conv(x)).flatten(1)))
参考内容
- dwconv
- 深度学习训练营Y4
- YOLOv5 源码解析 —— 卷积神经单元




![[FREERTOS] 任务的创建、删除、调度与状态](https://img-blog.csdnimg.cn/1c12348ac5f14c5aa53fceb3184c534d.png)
![浅谈[Linux搭建GitLab私有仓库,并内网穿透实现公网访问]](https://img-blog.csdnimg.cn/img_convert/4685d370be049c181d6cb66395d552c0.png)