C语言实现惯导更新算法(机械编排)
news2026/2/12 17:37:02

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/428695.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
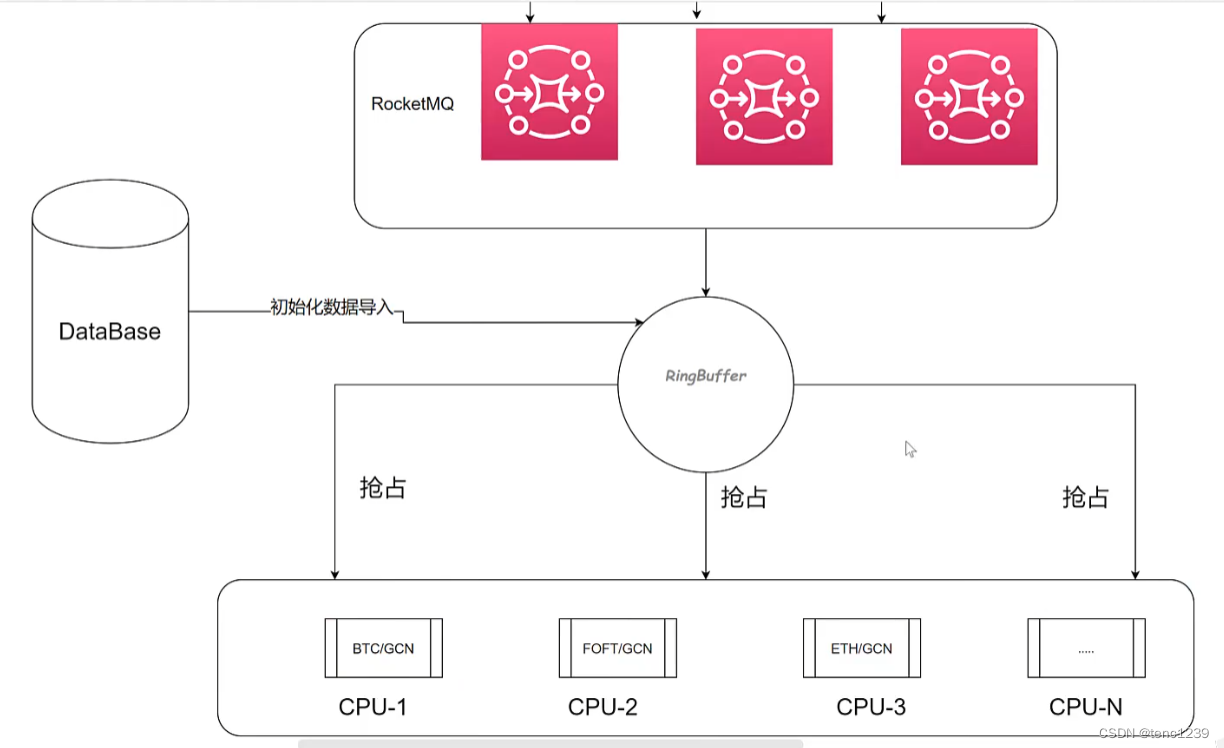
coinex02// 撮合引擎 RingBuffer Disruptor的构建与使用
目录 0. 课程视频地址
0.1 撮合引擎课程
0.1 RocketMQ安装
0.3 RocketMQ搭建成功后登录
1. docker 配置rocketmq
2 逻辑树 : 构建RingBuffer -> 使用RingBuffer
2.1 生产者往RingBuffer中放数据 Disruptor把数据推给消费者cpu
2.2 RingBuffer, Disruptor的创建 ->…
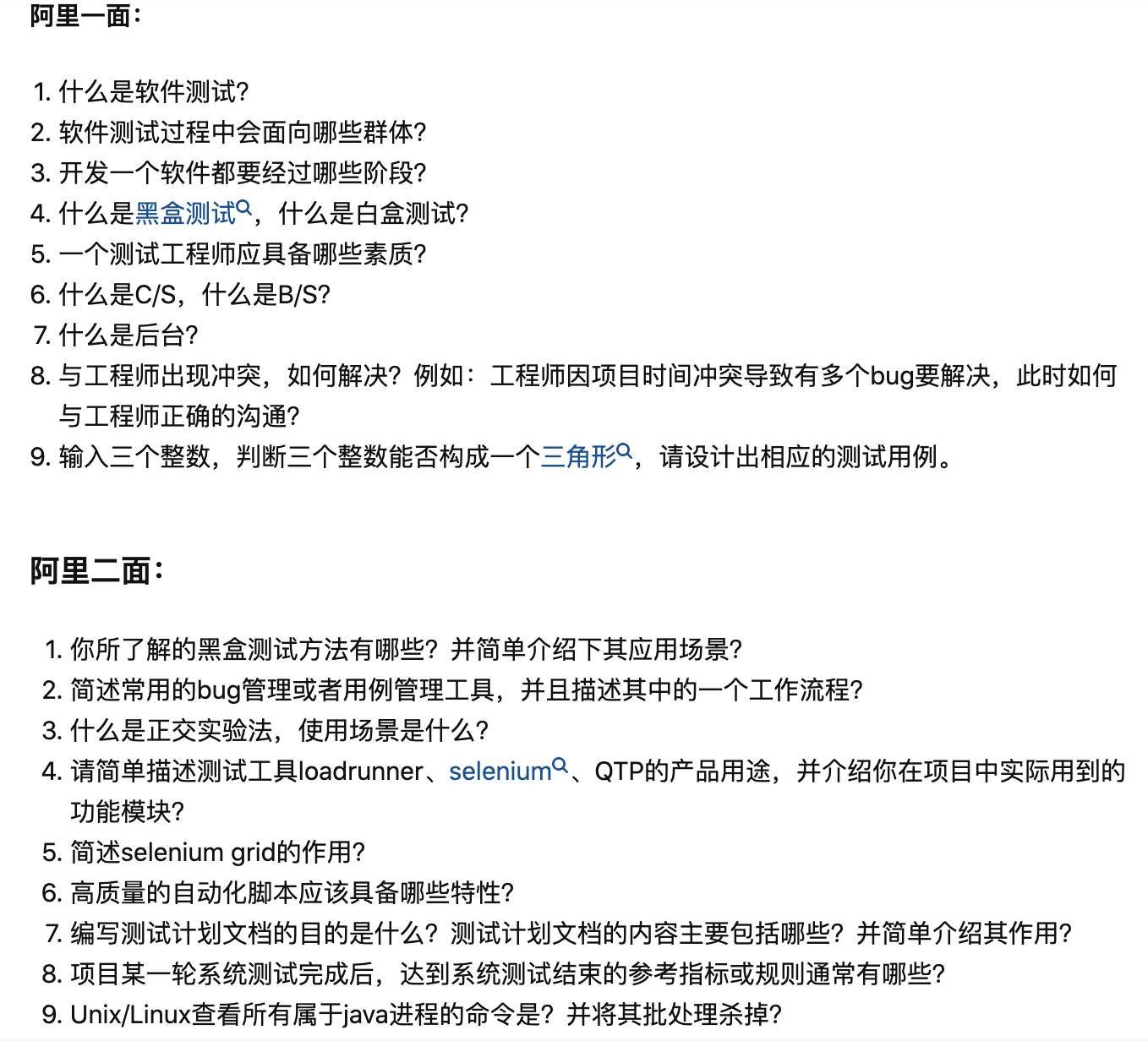
麻了,别再为难测试工程师了...
前言
有不少技术友在测试群里讨论,近期的面试越来越难了,要背的八股文越来越多了,考察得越来越细,越来越底层,明摆着就是想让我们徒手造航母嘛!实在是太为难我们这些测试工程师了。
这不,为了帮大家节约时…
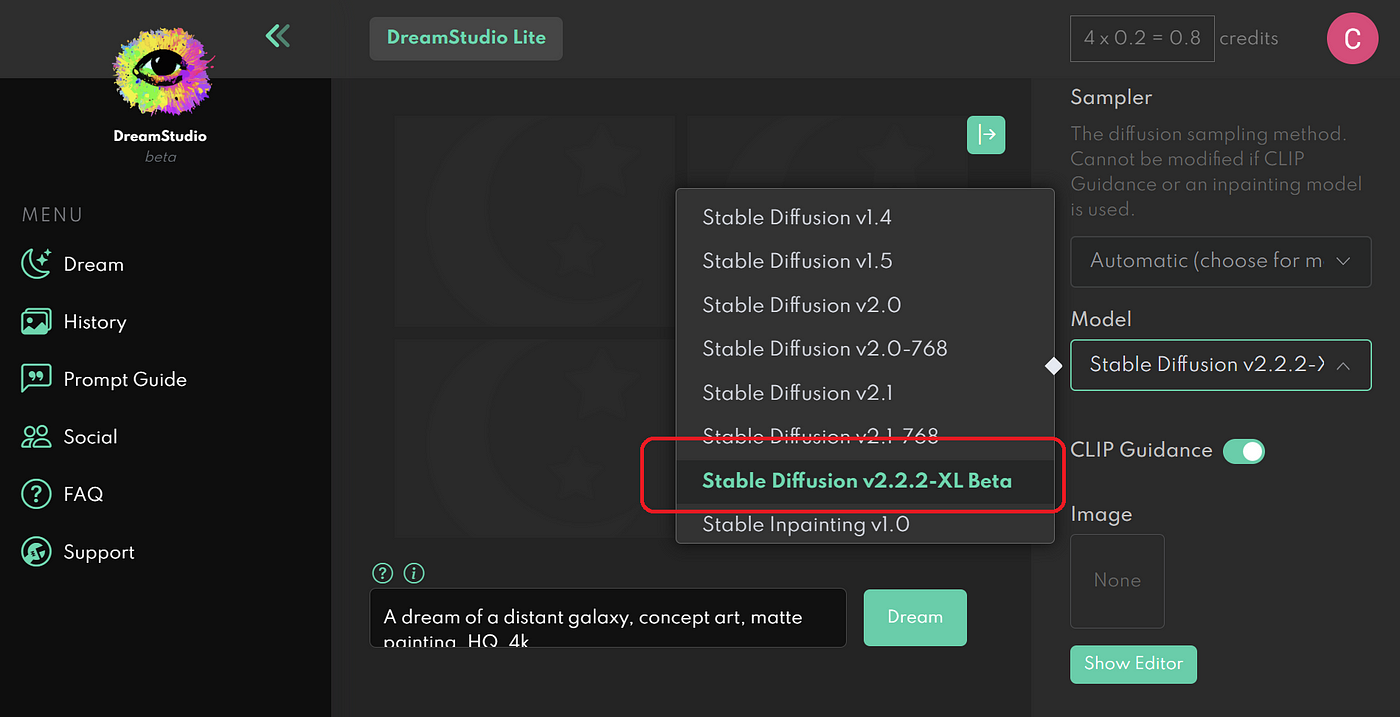
Stable Diffusion XL:更快,更强
Stable Diffusion XL:更快,更强
今天,Stability AI 的创始人兼首席执行官 Emad Mostaque 发推宣布,Stable Diffusion XL 进入公测阶段。
核心信息总结起来有2点:
“XL”不是新模型的官方名称,Stability …
计算机图形学——游戏方向 第一章 计算机图形学概述
计算机图形学——游戏方向 第一章 计算机图形学概述前言第一章 计算机图形学概述1.为什么设计专业要学习计算机图形学?计算机图形学与计算机视觉等领域的关系计算机图形学基础自学体系2.计算机图形学的辨析3.计算机图形(学)的发展历史1951:N…
〖Python网络爬虫实战⑭〗- BeautifulSoup详讲
订阅:新手可以订阅我的其他专栏。免费阶段订阅量1000python项目实战 Python编程基础教程系列(零基础小白搬砖逆袭) 说明:本专栏持续更新中,目前专栏免费订阅,在转为付费专栏前订阅本专栏的,可以免费订阅付费…
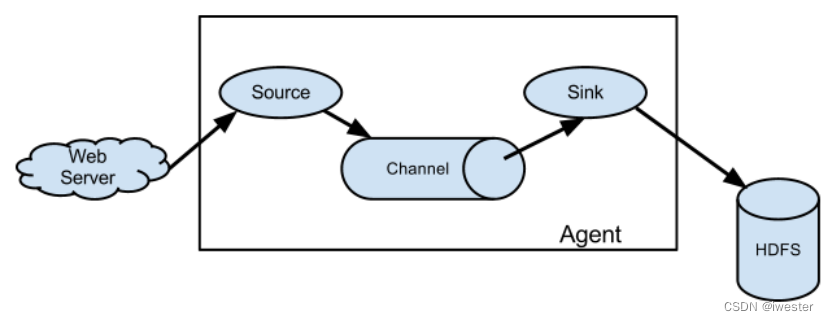
Flume系列:Flume Source使用
目录
Apache Hadoop生态-目录汇总-持续更新 1:taildir source
2:kafka source
3:exec source(tail -F)
4:netcat source(采集端口)
5:spoolDir读取目录文件…

Axios请求(对ajax的二次封装)——Axios API、Axios实例、请求配置、Axios响应结构
axios起步——介绍和使用基本用例post请求场景复现核心干货axios APIaxios(config)axios(url[,config])请求方式别名axios实例创建一个axios实例axios.create([config])实例方法axios请求配置axios响应结构场景复现
最近学习与前端相关的小程序时,接触了异步请求ap…

医学图像配准 (Medical Image Registration)
目录
Classification
Transformation Registration Algorithms
Landmark Based
Surfaced Based
Voxel Intensity Based
Information Theory Based
Registration using basis functions
Registration using splines
Other Physics Based Registration
Optimization
V…

OctoClock CDA 2990
CDA 2990 CDA 2990为时钟和PPS分发设备,支持外部一路时钟和PPS输入,最高支持8路时钟和PPS输出。同时CDA 2990可选配带GPS模块版本,可外接GPS天线,支持通过GPS锁定时钟和PPS信号输出。CDA 2990主要用于多台USRP设备进行同步。
CDA…
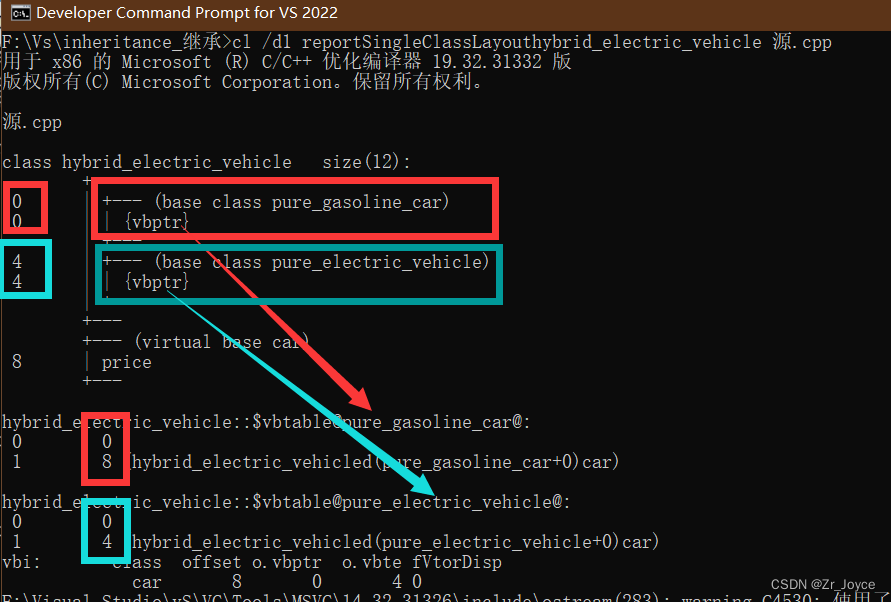
C++之 继承 (inheritance)
目录
启示
一、基本语法
二、继承的方式
三种:
公共基础 / 保护继承 / 私有继承
三、继承中的对象模型
①父类中所有非静态成员属性都会继承给子类
②而私有成员属性同样继承过去,但是被编译器隐藏,因此无法访问
四、继承中构造和析…

2023年,送你一份最新的后端架构师知识图谱
这是一个能让你成为架构师的文章,请耐心读完。
为什么写这个 前几天心血来潮搜了下《后端架构师》的技术图谱。发现最新最火的文章更新时间还停留在5年前。最新的技术体系并没有罗列在内。而且文章的颗粒度特别细,是从数据结构和常用算法开始的。这是典…
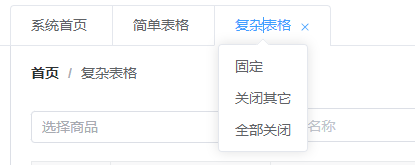
【加餐 2】Tab 标签页管理
【加餐 2】Tab 标签页管理
对于管理系统,经常需要开启多个标签页,但是每次都需要手动去关闭,很麻烦,所以就有了这个功能,可以一键关闭所有标签页,或者关闭除当前标签页外的所有标签页,对于重要的标签页,可以进行固定至前列,方便下次快速打开。
一、实现效果
实现效…

论文浅尝 | 利用知识图谱增强的Transformer进行跨领域方面抽取
笔记整理:沈小力,东南大学硕士,研究方向为知识图谱链接:https://dl.acm.org/doi/pdf/10.1145/3511808.3557275动机情感分析是自然语言处理的基础任务,它包含介绍了细粒度情感分析中的一个常见任务——基于方面的情感分…
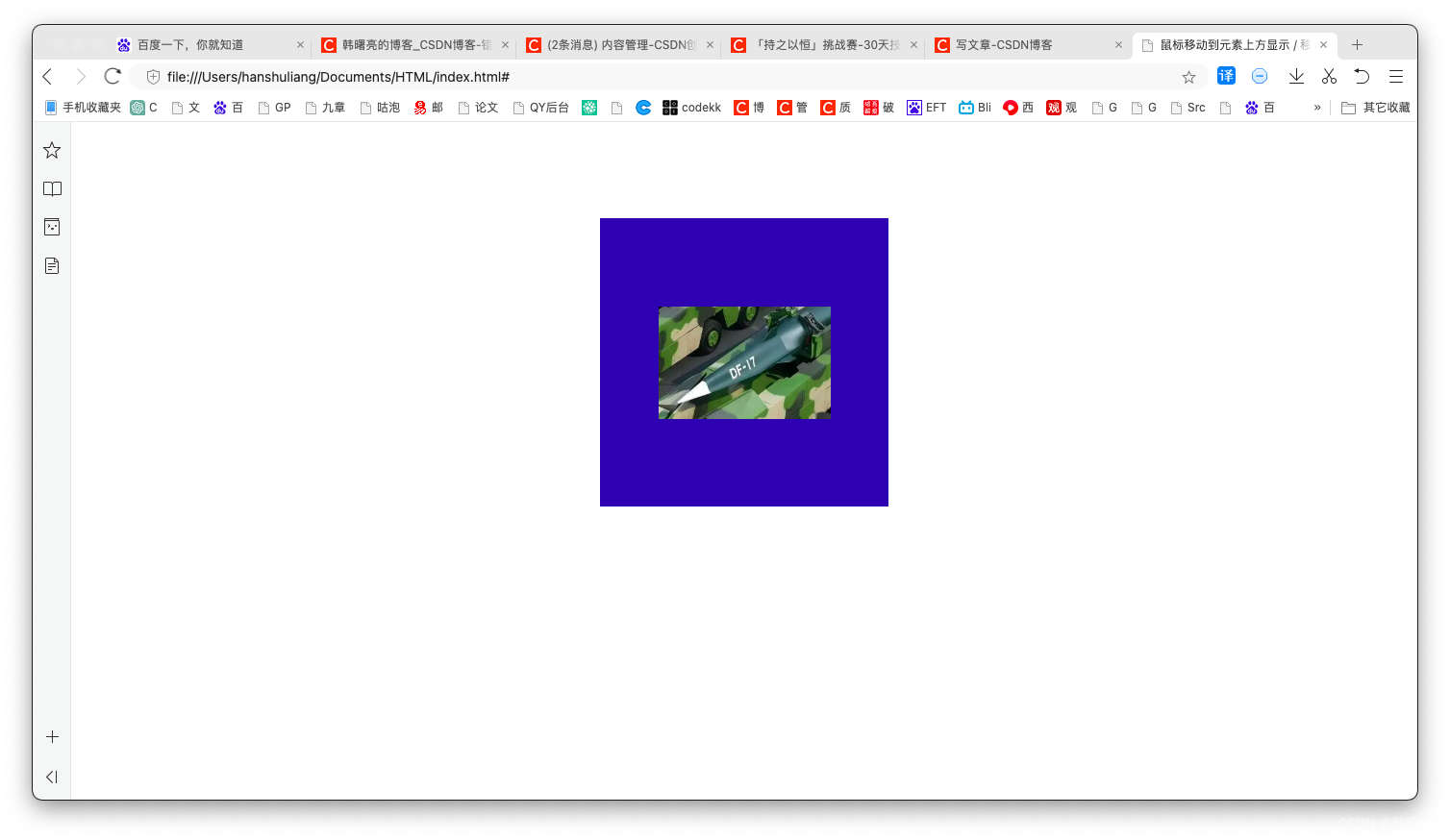
【CSS】鼠标移动到元素上方显示 / 移出盒子范围隐藏案例 ( 子绝父相 | 显示隐藏元素对象 | 鼠标经过样式设置 | 半透明遮罩设置 )
文章目录一、鼠标移动到元素上方显示 / 移出盒子范围隐藏案例要点分析1、子绝父相2、显示隐藏元素对象3、鼠标经过样式设置4、半透明遮罩设置二、代码示例一、鼠标移动到元素上方显示 / 移出盒子范围隐藏案例要点分析 1、子绝父相 这里要 在一个 div 盒子上方套一层遮罩 , 遮罩…
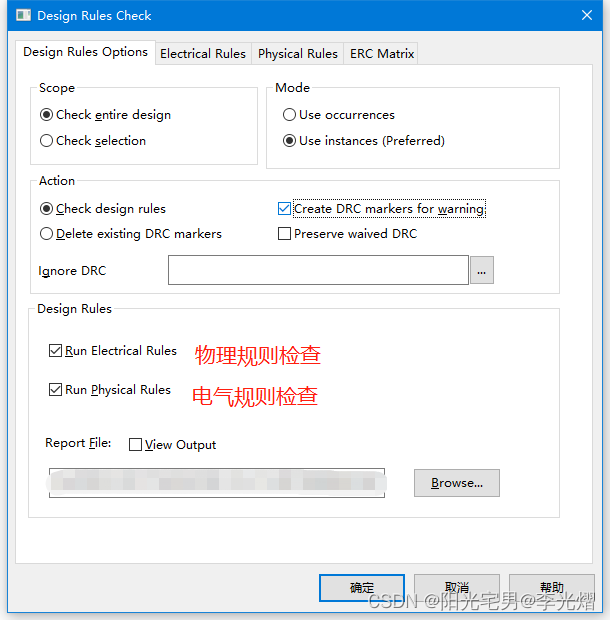
【原理图专题】OrCAD Capture 设计规则(DRC)检查
在原理图设计完成后,需要进行DRC检查,DRC检查能协助工程师快速检查原理图的物理、电气规则是否正确,能快速定位错误和原因。 DRC检查从Capture 工具栏中如下图红框所示的图标中Design Rules Check进入 进入后将打开DRC窗口,有四个选项卡。分别是Design Rules Options、Elec…
带你了解攻击与防护相关知识
目录 一、攻击篇
1.什么是恶意软件?
2.恶意软件有哪些特征?
3. 恶意软件的可分为那几类?
4. 恶意软件的免杀技术有哪些?
5. 反病毒技术有哪些?
6. 反病毒网关的工作原理是什么?…
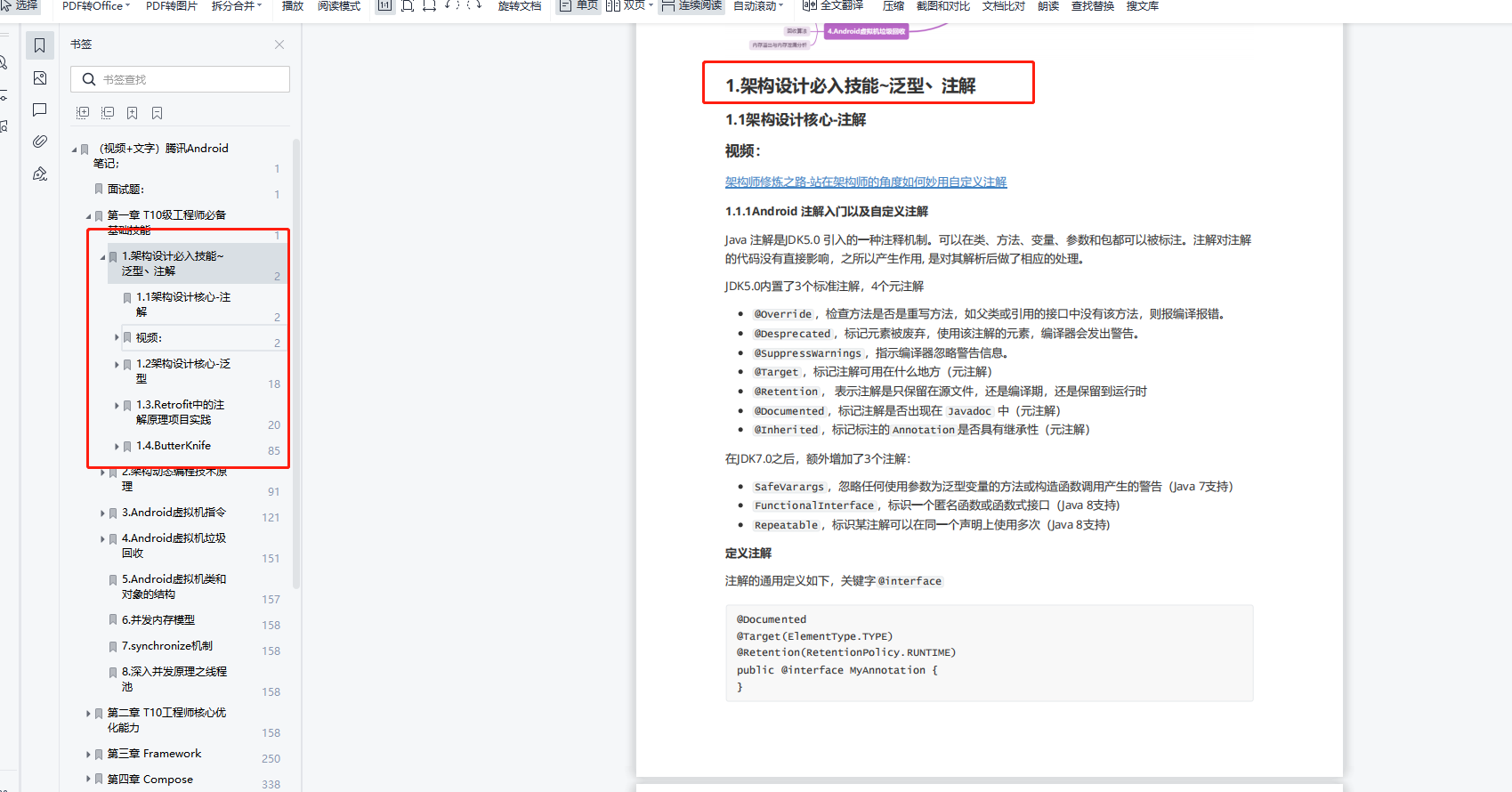
Android开发中,自定义注解的两种应用方式
java注解在Android开发中主要有两种使用方式;一种是在程序运行期间获取类的信息进行反射调用;另一种是使用注解处理,在编译期间生成相关代码,然后在运行期间通过调用这些代码来实现相关功能。
我们先了解一下注解的分类和关键字 …

前端实用js dom合集
1. 整个网页变为灰色主题,最外层加css样式:filter:grayscale(1)
黑色主题:filter:invert(1) 2.js剪辑视频片段制作gif动图:
效果:点击开始就开始录制,点击结束右边显示生成的gif动图 生成g…
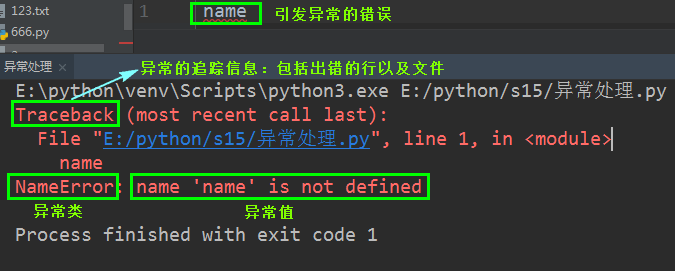
Python程序异常处理
一、什么是异常
异常就是程序运行时发生错误的信号,在程序由于某些原因出现错误的时候,若程序没有处理它,则会抛出异常,程序也的运行也会随之终止;
程序异常带来的问题:
1.程序终止,无法运行…