2.1
功能要求及性能指标
2.1.1
功能要求
(
1
)具备方位和俯仰两轴运动的能力;
(2)方位轴可实现预置、周扫和扇扫功能;
(3)俯仰轴可实现预置功能。
2.1.2
性能指标
(
1
)运动范围:方位转动范围为 ,俯仰转动范围为 ;
(2)角速度:方位最大角速度为
100º/s
,俯仰最大角速度为
40º/s
;
(3)角加速度:方位最大角加速度为
90º/s
2
;
(4)静态定位误差:
0.1º
(最大值);
(5)角分辨率:
0.01º
;
(6)系统供电:电压为
27V
,启动电流为
6A
,工作电流为
2.5A
;
(7)电气接口:采用
RS-422
传输协议,上位机下发频率为
100Hz
,控制器上传
频率为
200Hz
,波特率采用
115200bps
;
(8)环境适应性:温度范围为
−40
℃
60
℃,湿度范围为
10% 90%
,高度大于
3000m
,冲击为
25g
(
11ms
);
(9)具有故障反馈、过压保护、过流保护和上电自检功能。
2.2
机载雷达伺服控制系统总体方案
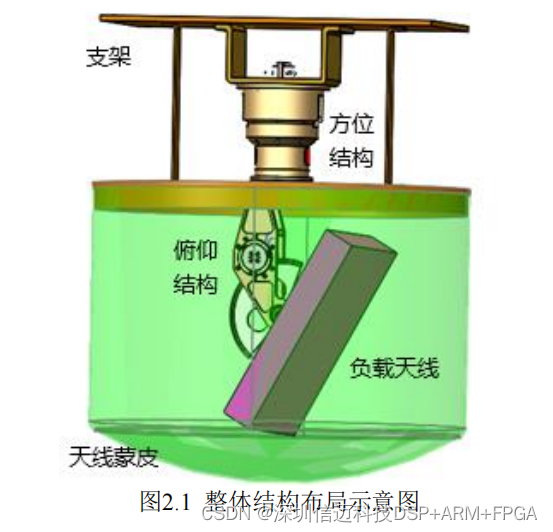
图
2.1
给出了机载雷达伺服控制系统的整体结构布局示意图。其中上半部分为
方位部分,位于支架和飞机蒙皮之间,方位圆筒内布置有旋转关节、汇流环、方位
电机和方位角度编码器等元部件。下半部分为俯仰部分,位于天线罩内,布置有天
线、俯仰电机和俯仰编码器等元部件。
机载雷达伺服控制系统可以划分为控制单元、驱动单元和伺服机构。其中控制单
元是实现伺服控制功能的关键部分,为本文重点设计内容;驱动单元主要实现功率放
大和电流采样闭环功能;伺服机构则承载负载天线实现各种功能。系统的总体方案设
计如图
2.2
所示:
图
2.2
中的控制单元是系统核心,采用
DSP+FPGA
的组合作为控制处理器。其
中
DSP
主要用于实现各种控制算法;
FPGA
主要用于数据接口,既能通过
XINTF
接
口与
DSP 进行数据交换,又能够生成外围电路的控制时序,完成数据采集和发送等
操作。该组合能够充分发挥两种芯片的优势,既保证了时序的稳定,又能够提高控制
算法的处理速度。
驱动单元主要由方位轴和俯仰轴驱动器构成,能够将控制单元提供的控制信号进
行功率放大,驱动电机转动。驱动器具有过温、过压和过流保护功能以及故障报警功
能。
伺服机构是控制系统的执行机构,在控制单元和驱动单元的控制下完成指定的功
能。伺服机构除了搭载天线负载外,还安装有电机、角度编码器、汇流环、轴承和配
重块等部件。
2.3
控制单元硬件电路设计
2.3.1
电路总体设计
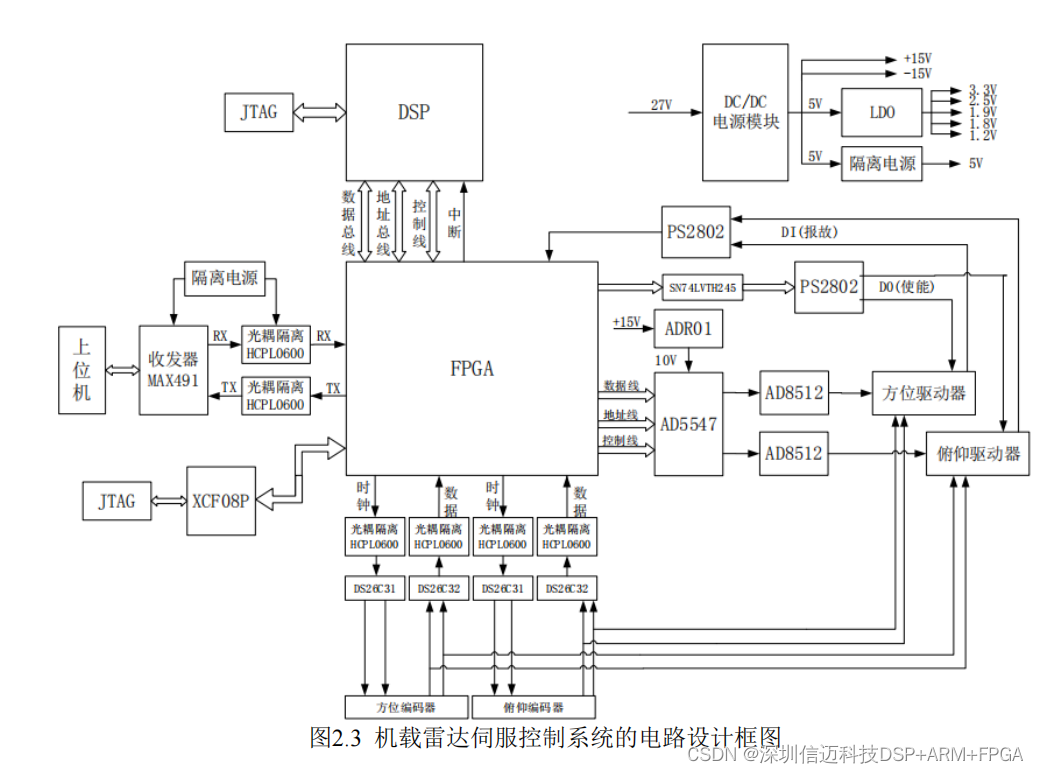
在该伺服控制系统中,控制单元为重点设计对象,控制单元的电路设计方案如图
2.3
所示。
如图
2.3
所示,控制处理器使用
DSP+FPGA
组合,其中
DSP
主要实现控制算法,
同时能通过
XINTF
接口与
FPGA
进行数据交换。
FPGA 主要用于实现外围电路的控
制时序。由于
FPGA
掉电后会复位,因此添加配置芯片
XCF08P
对
FPGA
进行程序
下载。其余电路介绍如下:
(
1
)图
2.3
中左侧为上位通信接口电路,采用全双工收发器
MAX491
和光电隔
离芯片
HCPL0600
共同实现。为了隔离上位通信线缆引入的噪声干扰,使用隔离电源
为该接口电路供电。
(2)图
2.3
中下方为
SSI
接口电路,用于采集方位轴和俯仰轴角度编码器的数
据。光电隔离芯片
HCPL0600
可以隔离干扰,同时可实现电平转换。
DS26C31
芯片
可将
FPGA
输出的单端时钟信号转换为差分信号,
DS26C32
芯片可将编码器回传的
差分角度信号转换为单端信号。编码器回传的角度数据需要提供给驱动器,实现闭环
功能。
(3)图
2.3
中右侧为驱动控制电路,主要包括
DI/DO
接口电路和
DA
接口电路。
其中
DI
电路用于接收驱动器输出的故障报警信号,
DO
电路用于输出驱动器使能和
模式选择信号。
DI/DO
电路均选用光电隔离芯片
PS2802
来实现,
DO
电路添加了
SN74LVTH245
芯片来增强驱动能力。
DA
接口电路则将
DSP
计算得到的控制指令转
换为电压信号,并输出至驱动器。
DA
接口电路主要由
D/A
转换芯片
AD5547
、运放
AD8512
和基准源
ADR01
构成。
(4)图
2.3
中右上部分为电源电路,
DC/DC
电源模块将外部输入的
27V
直流电
压转换为
5V
和
±15V
电压。其中
5V
电压用于数字电路,并通过各种
LDO
芯片转换
为不同的电压;
±15V
电压用于模拟电路,为
DA
接口电路的运放和基准源供电。
2.3.2
负载力矩估算
负载力矩是电机和驱动器选型的关键参数,由于机载雷达会受到振动和冲击的影
响,故在计算负载力矩时需要留有一定的余量。需要计算的负载力矩有三个:惯性力
矩、摩擦力矩和不平衡力矩。
2.3.4
控制芯片选型
控制单元采用
DSP+FPGA
的处理器组合,
DSP
的型号为
TMS320F28335
,
FPGA
的型号为
XC4VLX-15
。


![[测试猿课堂]接口自动化软件测试Requests模块从0到精通 一篇搞定](https://img-blog.csdnimg.cn/img_convert/09f102e2b01929c07082ec7bc620b04a.jpeg)






![[Java]面向对象高级篇](https://img-blog.csdnimg.cn/fdacd94b6b564c7d8a7c7a8df5f933e1.png)