本文默认卷积的输入输出数据格式为NHWC。
1x1卷积


输入shape为[N, H, W, C] , filter为[Hf, Wf, Ci, Co]
FH, FW都为1,直接把输入shape reshape为[N, H * W, C], filter reshape为[[Hf * Wf * Ci, Co],然后进行矩阵乘得到[N, H * W, Co],再reshape为卷积的output shape即可。
kernel shape=strides卷积
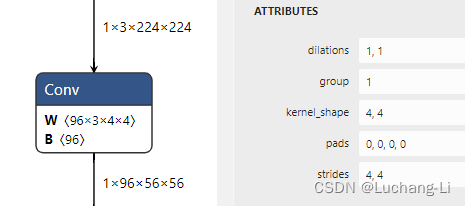
跟1x1卷积类似,这种卷积特点是每次卷积计算的输入数据块之间没有重叠,可以结合transpose简单处理为矩阵乘:
假设输入格式为[N, H, W, C],可以重新解释为[N, H1*H0, W1*W0, C], H0,W0即为kernel_shape大小,H1和W1为卷积输出的图像宽度,而filter的格式为[Hf, Wf, Ci, Co]
把卷积输入从[N, H1*H0, W1*W0, C] reshape和transpose转换为[N,H1*W1,H0*W0*C],然后与filter的[Hf*Wf*Ci, Co]做矩阵乘即可,得到输出为[N, Ho*Wo, Co],reshape为卷积输出的shape即可。
显式矩阵乘卷积(explicit GEMM convolution)
也叫做Im2Col或者im2row。这需要把卷积拆分为Im2Col和矩阵乘两个算子。
Im2Col思想非常简单,也就是把输入每次filter覆盖的FH*FW*Ci的那部分数据展开成为一行,作为矩阵乘的K,而filter的Co作为矩阵乘的N。
而输入数据整个Hi*Wi的图像宽度要计算Ho*Wo次卷积计算,因此作为矩阵乘的M部分,因此,输入数据经过Im2Col后变成[N, Ho*Wo, FH*FW*Ci]的tensor,而卷积的filter reshape为[FH*FW*Ci, Co]的tensor,两个做矩阵乘得到[N, Ho*Wo, Co],再Reshape一下即可作为卷积的输出。
这个方法的一个巨大的缺点是Im2Col之后的临时数据相比卷积的输入有巨大的提升,导致会占用大量的内存,特别是stride=1的情况。比如kernel_shape为3x3,stride=1,那么Im2Col后的张量数据为卷积输入的9倍。
隐式矩阵乘卷积(implicit GEMM convolution)
与Im2Col方法一样,但是不需要把卷积拆分为两个独立的Im2Col和矩阵乘两个部分,而是在矩阵乘计算的数据读取时,采用特定的数据读取方法,实现im2col。
implicit GEMM方法更偏好输入数据格式为NC1HWC0, 其中输入的C=C1*C0,C0通常为4,8,16等。
具体计算方法参考
卷积:从推理引擎优化和硬件优化角度理解 - 知乎
The Indirect Convolution Algorithm

Winograd卷积
这种方法虽然只能处理几种比较特定kernel shape和stride的场景,但性能通常比Im2Col方法更好。Winograd通过input 和weight transform把卷积转换为矩阵乘计算,最后再通过output transform得到卷积结果,具体原理参考:
Winograd算法实现卷积原理_winograd卷积_Luchang-Li的博客-CSDN博客
winograd卷积实践_Luchang-Li的博客-CSDN博客
Ref
卷积:从推理引擎优化和硬件优化角度理解 - 知乎
OpenPPL 中的卷积优化技巧 - 知乎
The Indirect Convolution Algorithm