<STM32>STM32CubeMX-CAN通信(扫描读取数据方式)(5)
本节主要讲解CAN通信的功能,主要采用扫面检测接收数据的方式;
CAN的详细解说可参考《STM32F4XXX中文参考手册》,资料有详细的讲解和说明,文档可跟作者联系索取,或百度搜索也可。
本系列教程同类文章包括以下:
1、<STM32>STM32CubeMX-基础工程创建及LED灯控制 (1)
2、<STM32>STM32CubeMX-工程创建及定时器控制LED灯闪烁(2)
3、<STM32>STM32CubeMX-串口收发通信(结束标识“\r\n”)(3)
4、<STM32>STM32CubeMX-ADC采集(软件触发单通道)(4)
话不多说,开始写代码吧。。
一、打开STM32CubeMX选择对应的芯片型号,后进入开发界面
1、双击“STM32CubeMX”软件打开,打开后如下图所示,选择红色框1;

选择后可能会更新,等待更新完成即可,如下图:

2、选择开发芯片,作者本例程的芯片是STM32F407ZET6,读者根据自己使用的开发板芯片选择即可。操作如下:
按照下图步骤:
步骤1:输入开发使用的芯片型号,作者这里输入:STM32F407ZE,就会在步骤2显示芯片的具体型号;
步骤2:选择具体使用的芯片型号,选中后会高亮;
步骤3:点击“Start Project”,开始进入工程图形配置界面。

二、图形界面配置
由于采集的ADC数据需要查看,所以本例程采用的是通过串口输出采集的数据,输出到电脑端的串口调试助手。
所以除了基本的时钟、晶振等一些配置,还包含串口配置和ADC配置。
1、配置晶振
步骤1:选择“Pinout&Configuration”;
步骤2:选择“System Core”;
步骤3:选择“RCC”;
步骤4、5:选项下拉选择“Crystal/Ceramic Resonator”
下拉选项说明:
Crystal/Ceramic Resonator:晶体/陶瓷晶振,一般使用的都是这个
BYPASS Clock Source:旁路时钟源

2、配置DEBUG和SYS
步骤1:选择“Pinout&Configuration”;
步骤2:选择“System Core”;
步骤3:选择“SYS”;
步骤4:选择“Serial Wire”;
此选项是下载调试的方式选择,有很多种,包括SWD、JTAG等方式。
步骤5:选择“Sys Tick”;
此选项是HAL时基的选择,有滴答定时器,和其它定时器1、2、3、4、5…,这里选择SysTick滴答定时器。

3、配置调试输出串口1
步骤1:选择“Pinout&Configuration”;
步骤2:选择“Connectivity”;
步骤3:选择“USART1”;
步骤4:选择“Asynchronous”;
此下拉选项有多种选择,分别如下:
Asynchronous:异步通信
Synchronous:同步通信
Single Wire(Half-Duplex):半双工
Multiprocessor Communication:多处理器通信
lrDA:红外数据
LIN:局域网互联
SmartCard:智能卡
步骤5:选择“NVIC Settings”->然后勾选中断使能。
选项卡“Parameter Settings”是设置串口的参数
Basic Parameters->Baud Rate:设置波特率,默认115200,可不修改;
Basic Parameters->Word Length:字长,默认“8Bits”,默认即可;
Basic Parameters->Parity:奇偶校验,默认选择"None"无校验;默认即可;
Basic Parameters->Stop Bits:停止位,默认1,默认即可;
Advanced Parameters->Data Direction:数据方向,默认“Receive and Transmit”可接收发送,默认即可;
Advanced Parameters->Over Sampling:过采样长度,默认“16 Samples”16个采样,默认即可;
选项卡“NVIC Settings”是设置中断使能-勾选对应的中断信号源即可,本工程只勾选“USART1 global interrupt”;
选项卡“DMA Settings”是设置串口DMA通道的,可添加DMA,在本工程,不使用。
其它选项卡无需设置。

4、配置CAN1,使用CAN1,即PA11和PA12引脚
步骤1:选择“Pinout&Configuration”;
步骤2:选择“Connectivity”;
步骤3:选择“CAN1”;
步骤4:勾选"Activated"。
步骤5:CAN参数配置,
选项卡“Parameter Settings”是设置ADC的参数
(1)Bit Timings Parameters->Prescaler :分频系数,这里根据CAN的主频(由时钟树配置得到42Mhz),此处输入42;
(2)Bit Timings Parameters->Time Quanta in Bit Segment 1:位段 1 中的时间量,此处选择“2 Times”;
(3)Bit Timings Parameters->Time Quanta in Bit Segment 2:位段 2 中的时间量,此处选择“5 Times”;
(4)Bit Timings Parameters->ReSynchronization Jump Width:重新同步跳转宽度,此处默认选择“1 Times”即可;
以上四个参数可得到CAN通信的波特率:主频/(2+1+5)/42 =125KHz
其余参数默认即可…
选项卡“NVIC Settings”是设置中断使能,本工程全选;
其它选项卡无需设置。
步骤6:选择PA11和PA12,左击然后选择CAN_TX和CAN_RX。如下图所示。

三、配置系统时钟
步骤1:选择“Clock&Configuration”;
步骤2:外部高速晶振的大小,作者用的开发板上,外部高速晶振大小时8MHz,读者根据自己使用的开发板上的晶振大小输入对应的值即可;
步骤3:选择器选择下面园点,即选中外部晶振作为输入源;如果电路没外部晶振,可选择上面圆点,选择芯片内部高速晶振作为输入,本工程选外部输入;
步骤4:选择“PLLCLK”,就是选择倍频器PLL作为输入时钟源,如果没外部高速晶振,则选择HSI(第一个圆点);
步骤5:直接输入“168”,作为系统的主频大小。
以上修改完成后 回车,如果右提示,选择确认即可。
参考下图选择,高亮的位置都可以修改,修改后的值如下图所示:

四、工程输出配置
1、项目文件配置
步骤1:选择“Project Manager”
步骤2:选择“Project”
步骤3:输入工程名称,作者这里输入“CAN1”,表示CAN1功能的工程,一般名称体现工程的作用,可以自定义;
步骤4:点击“Browse”,选择工程存放的路径,不要包含中文;
步骤5:下拉选择“MDK-ARM”,表示用的IDE是keil;可以根据自己使用的编程软件选择,这里作者选用“MDK-ARM”;后面的“V5.27”则是软件的版本号;
步骤6:芯片的HAL库固件包,勾选后面,会自动选择,一般会自动更新到最新版本;

2、代码生成配置
步骤7:选择“Code Generator”;
步骤8:STM32Cube MCU packages and embedded software packs,STM32Cube MCU 软件包和嵌入式软件包选择,本工程选中第一条;
第一条:Copy all used libraries into the project folder:将所有使用的库复制到项目文件夹中;
第二条:Copy only the necessary library files:只复制必要的库文件;
第三条:Add necessary library files as reference in the toolchain project configuration file:在工具链项目配置文件中添加必要的库文件作为参考;
建议选中第一条,将所以的包含,避免后续开发出现遗漏的文件,方便后续功能增加,就是工程代码量会大一些;
步骤9:Generated files,生成文件,本工程选中,第一、三、四,三个选项;
第一条:Generate pripheral initalization as a pair of ‘.c/.h’ files per peripheral:将外围设备初始化生成为每个外围设备的一对“.c/.h”文件
第二条:Backup previously generated files when re-generating,重新生成时备份以前生成的文件
第三条:Keep User Code when re-generating,重新生成时保留用户代码
第四条:Delete previously generated files when not re-generated ,不重新生成时删除以前生成的文件
步骤10:点击“GENERATE CODE”

点击生成后弹出提示框,点击“Open Project”,即可打开工程。

打开后就是界面如下:
五、代码补充
1、补充串口代码
串口是为了方便测试查看ADC的采集数据,重定向了printf函数,具体操作如下:
打开“usart.c”文件,
在文件头文件引用的“/* USER CODE BEGIN 0 /” 和“ / USER CODE END 1 */ ”之间添加如下代码:
#include "stdio.h"
添加后如下图:

在末尾的“/* USER CODE BEGIN 1 /” 和“ / USER CODE END 1 */ ”之间添加如下代码:
#if 1
//#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR=(uint8_t)ch;
return ch;
}
#endif

2、补充CAN1配置代码
打开can.c
补充CAN的初始化函数,补充后代码如下:
void MX_CAN1_Init(void)
{
/* USER CODE BEGIN CAN1_Init 0 */
CAN_FilterTypeDef CAN1_FilerConf;
/* USER CODE END CAN1_Init 0 */
/* USER CODE BEGIN CAN1_Init 1 */
/* USER CODE END CAN1_Init 1 */
hcan1.Instance = CAN1;
hcan1.Init.Prescaler = 42;
hcan1.Init.Mode = CAN_MODE_NORMAL;
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan1.Init.TimeSeg1 = CAN_BS1_2TQ;
hcan1.Init.TimeSeg2 = CAN_BS2_5TQ;
hcan1.Init.TimeTriggeredMode = DISABLE;
hcan1.Init.AutoBusOff = DISABLE;
hcan1.Init.AutoWakeUp = DISABLE;
hcan1.Init.AutoRetransmission = DISABLE;
hcan1.Init.ReceiveFifoLocked = DISABLE;
hcan1.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN1_Init 2 */
CAN1_FilerConf.FilterIdHigh = 0; //过滤掉不是发送给本机的数据帧//32位ID
CAN1_FilerConf.FilterIdLow = 0; //确保收到的是标准数据帧
CAN1_FilerConf.FilterMaskIdHigh = 0;//32位MASK
CAN1_FilerConf.FilterMaskIdLow = 0;//0xFFFF;
CAN1_FilerConf.FilterFIFOAssignment = CAN_FILTER_FIFO0;//过滤器0关联到FIFO0
CAN1_FilerConf.FilterBank = 0;//过滤器0
CAN1_FilerConf.FilterMode = CAN_FILTERMODE_IDMASK;//屏蔽位模式
CAN1_FilerConf.FilterScale = CAN_FILTERSCALE_32BIT;
CAN1_FilerConf.FilterActivation = ENABLE;
CAN1_FilerConf.SlaveStartFilterBank = 14;
if (HAL_CAN_ConfigFilter(&hcan1,&CAN1_FilerConf) != HAL_OK)
{
Error_Handler();
}
HAL_CAN_Start(&hcan1);
if(HAL_CAN_ActivateNotification(&hcan1,CAN_IT_RX_FIFO0_MSG_PENDING)!=HAL_OK)
{
}
/* USER CODE END CAN1_Init 2 */
}
,在末尾的“/* USER CODE BEGIN 1 /” 和“ / USER CODE END 1 */ ”之间添加如下代码:
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
CAN_RxHeaderTypeDef rxMsg;
uint8_t revData[8];
if(hcan->Instance==CAN1)
{
if(HAL_CAN_GetRxMessage(hcan,CAN_RX_FIFO0,&rxMsg,revData)==HAL_OK)
{
//数据解析
printf("接收数据如下:\r\n");
printf("标准ID:0x%08x\r\n",rxMsg.StdId);
printf("拓展ID:0x%08x\r\n",rxMsg.ExtId);
printf("数据为:0x%02x 0x%02x 0x%02x 0x%02x 0x%02x 0x%02x 0x%02x 0x%02x \r\n",revData[0],revData[1],revData[2],revData[3],revData[4],revData[5],revData[6],revData[7]);
}
}
}
/**************************************************************************************************
* @brief :CAN发送数据
* @param :
id:地址
ide:数据帧类型 CAN_ID_EXT:拓展帧 CAN_ID_STD:标准帧
pMsg:发送的数据内容
len:数据长度
* @retval :成功:0 失败:1.
* @note :none.
**************************************************************************************************/
uint8_t API_CanSendMsg(uint32_t id,uint8_t ide,uint8_t *pMsg,uint8_t len)
{
CAN_TxHeaderTypeDef pHeader;
uint32_t pTxMailbox;
uint8_t result = 0;
CAN_HandleTypeDef *pCanHandler;
HAL_StatusTypeDef CanStatus;
if(ide==CAN_ID_STD)
{
pHeader.StdId = id;//标准ID
pHeader.IDE = CAN_ID_STD;
}
else
{
pHeader.ExtId = id;
pHeader.IDE = CAN_ID_EXT;
}
pHeader.RTR = CAN_RTR_DATA;
pHeader.DLC = len>8?8:len;
pHeader.TransmitGlobalTime = DISABLE;
pCanHandler = &hcan1;
CanStatus = HAL_CAN_AddTxMessage(pCanHandler, &pHeader, pMsg, &pTxMailbox);
if(CanStatus !=HAL_OK)
{
result = 1;
}
return result;
}
添加后如下图:

打开can.h,在末尾的“/* USER CODE BEGIN Prototypes /” 和“ / USER CODE END Prototypes */ ”之间添加如下代码:
uint8_t API_CanSendMsg(uint32_t id,uint8_t ide,uint8_t *pMsg,uint8_t len); //函数声明
添加后如下图:
3、添加主函数代码
打开“main.h”文件
在文件头文件引用的“/* USER CODE BEGIN Includes /” 和“ / USER CODE END Includes */ ”之间添加如下代码:
#include "stdio.h"
添加后如下图:

打开main.c文件
主函数main添加相应代码,添加后内容如下:
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t SendData1[8]={0X01,0X02,0X03,0X04,0X05,0X06,0X07,0X08};
uint8_t SendData2[8]={0X01,0X01,0X03,0X03,0X0f,0X0f,0X0e,0X0e};
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_CAN1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
API_CanSendMsg(0x123321EE,CAN_ID_STD,SendData1,8);//发送标准数据帧
HAL_Delay(1000); //延时1000ms
API_CanSendMsg(0x123321EE,CAN_ID_EXT,SendData2,8);//发送拓展数据帧
printf("Send Data ...... \n");
}
/* USER CODE END 3 */
}
添加后如下图:

以上代码添加完成,接下来编译运行测试。
六、编译测试
1、编译,点击 编辑,确认编译无错,如果有错误,根据错误提示修改即可;
编辑,确认编译无错,如果有错误,根据错误提示修改即可;
2、选择下载方式,作者用的是STlink下载器,SWD的方式;配置参考下图选择;


3、将下载器链接开发板,然后点击 下载代码;
下载代码;
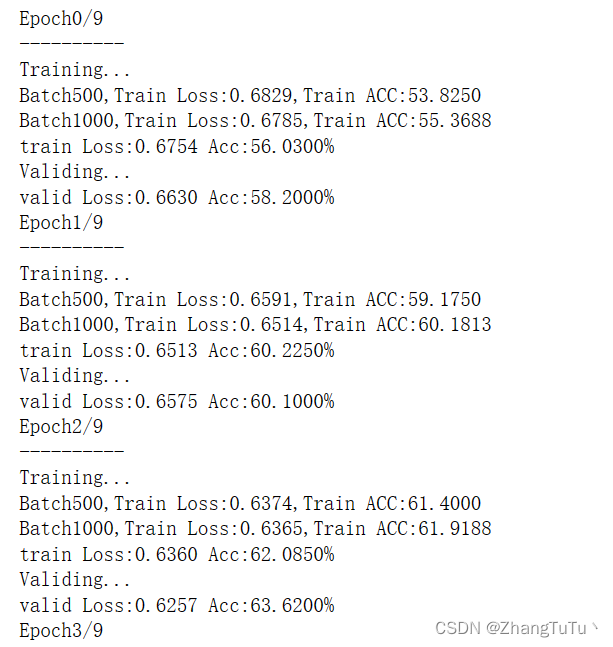
4、打开串口调试助手,选择开发板的串口号,配置串口参数和STM32配置的参数一致,然后点击“打开串口”,查看输出的内容;输入如下图所示:
5、将电路板的CAN接口连接CAN调试模块盒子,配置号CAN波特率和STM32代码一致(本工程为125KHz),打开CAN。可以看到接收输入如下图所示,可发送数据,查看串口助手输出。
七、总结
实验通过串口的输出和CAN调试软件可以看出,CAN通信收发数据正常。
以上是STM32F407ZET6开发板,验证STM32CubeMX创建CAN通信的整个流程。如有不足、遗漏之处可联系作者修改。
如有不明白,交流的地方也可联系作者。
联系方式QQ759521350



![后缀数组的应用:[Leetcode] 321.拼接最大数(困难)](https://img-blog.csdnimg.cn/c40fb687fe394dfa852ad41781d17b11.png)
