文章目录
- 前言-什么是通讯?
- 一、CAN是什么?
- 二、CAN的应用示例
- CAN网络细分
- 三、CAN发展历史
- 四、汽车网络汇总
- 总结
前言-什么是通讯?
“通讯是两个或两个以上参与者之间交换信息的有意识活动,目的是通过符号和语义规范的共享系统来发送或接收信息。
通讯的基本步骤包括通讯意图的形成,信息的组成,信息的编码,信号的发送,信号的接收,信息的解码以及最终的信息解释,
这一系列步骤也称之为协议。”
一、CAN是什么?
CAN 是 控制器局域网Controller Area Network 的缩写(以下称为 CAN),是 International Organization for Standardization国际标准化的串行通信协议。随着电子、汽车工程技术的发展,出于对安全性、经济性、舒适性等的考虑,各种各样的电子控制系统ECU被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个 LAN,进行大量数据的高速通信”的需要,1986 年德国Bosch(博世)公司开发出面向汽车的 CAN 通信协议。此后,CAN 通过 ISO11898 及 ISO11519 进行了标准化,现在世界上几乎所有汽车制造商都在使用。
传统汽车的电器系统中各个模块之间采用点对点的通信方式
大量的接线和连接,造成重量,复杂性,潜在的故障和额外的成本。
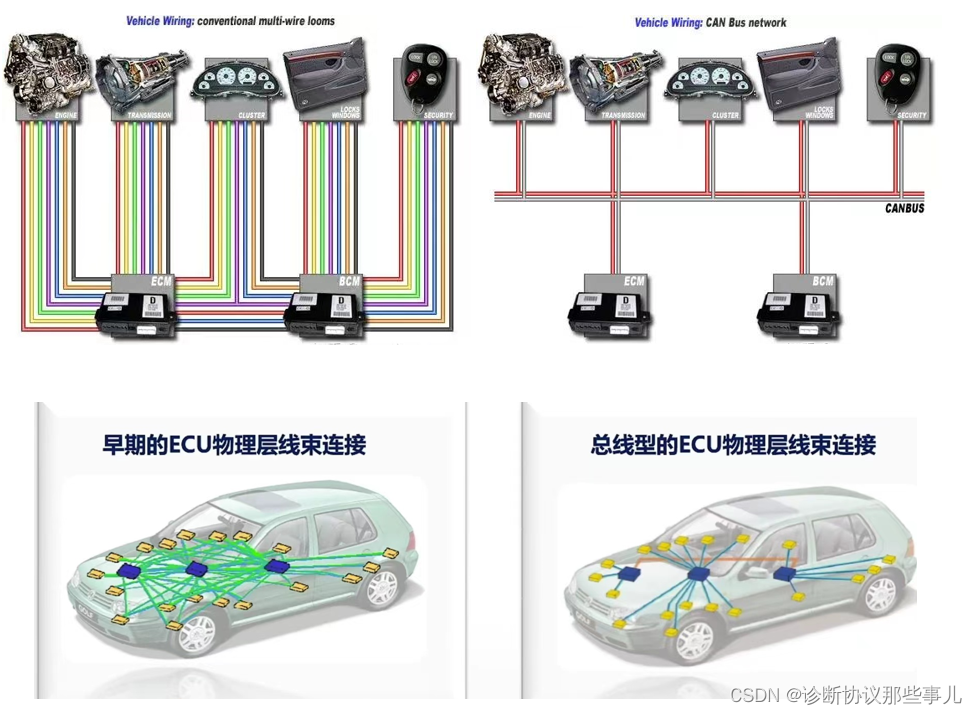
注:Electronic Control Unit电子控制单元简称ECU,是汽车中控制某个具体功能的模块。
常见的ECU比如:ABS(防抱死系统)、 TCU(Transmision Control Unit)自动变速箱控制单元、EMS(引擎管理系统)、ESP(Electronic Stability Program)车身电子稳定控制系统、BMS(Battery Management System)电池管理系统等。各个ECU直接通过车载网络进行通信。
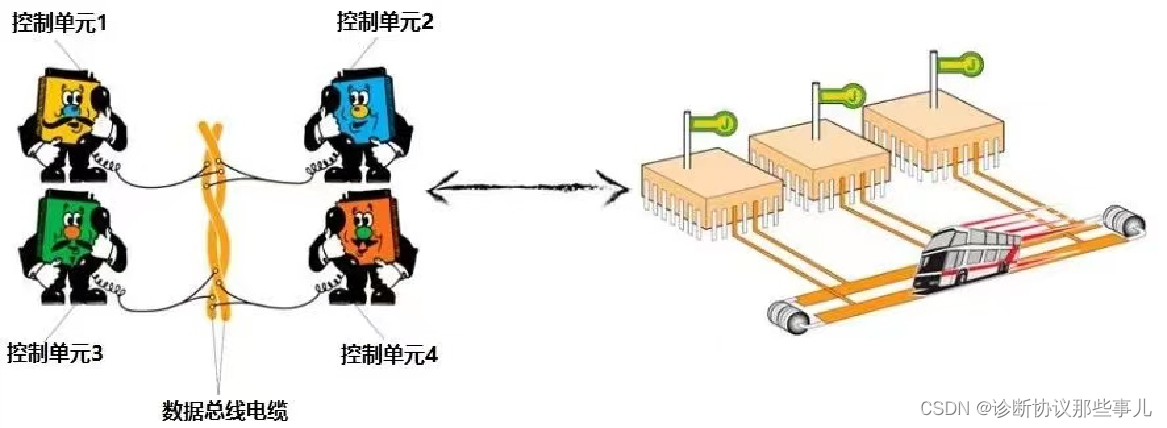
CAN通讯的数据传输方式类似于电话或视频会议,如下图。一个人(控制单元)发送其数据,将其输入网络,而其他人“共同收听”该数据。其中一部分人对此数据很有趣,因此接收它,另一部分人可能对该特定数据不感兴趣并将其丢弃。
二、CAN的应用示例
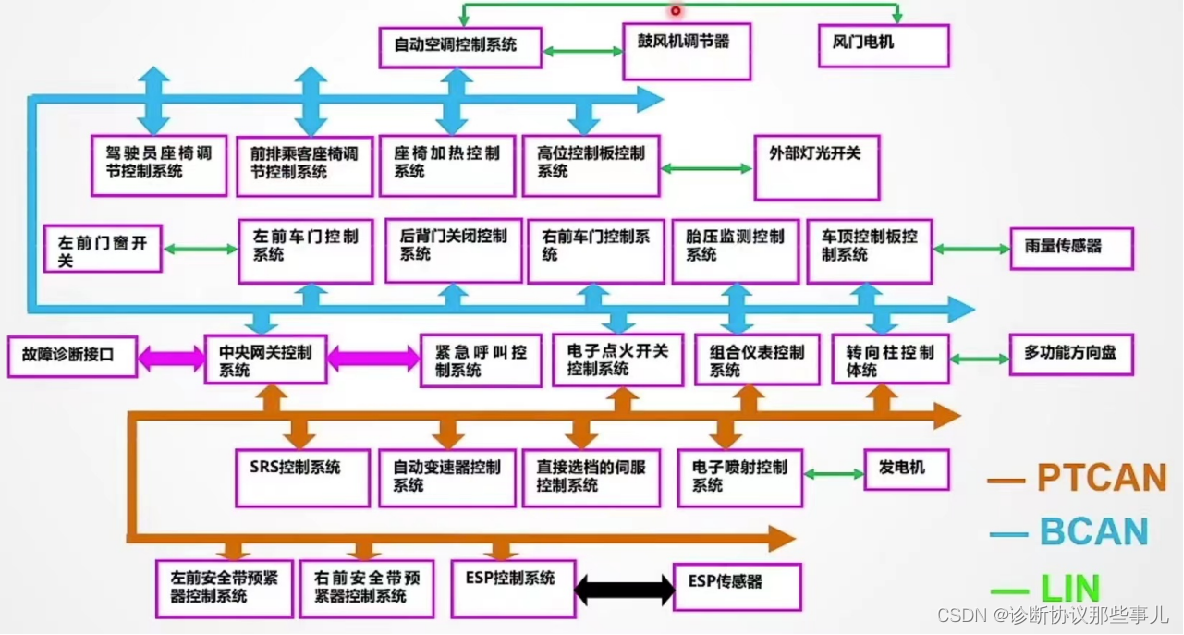
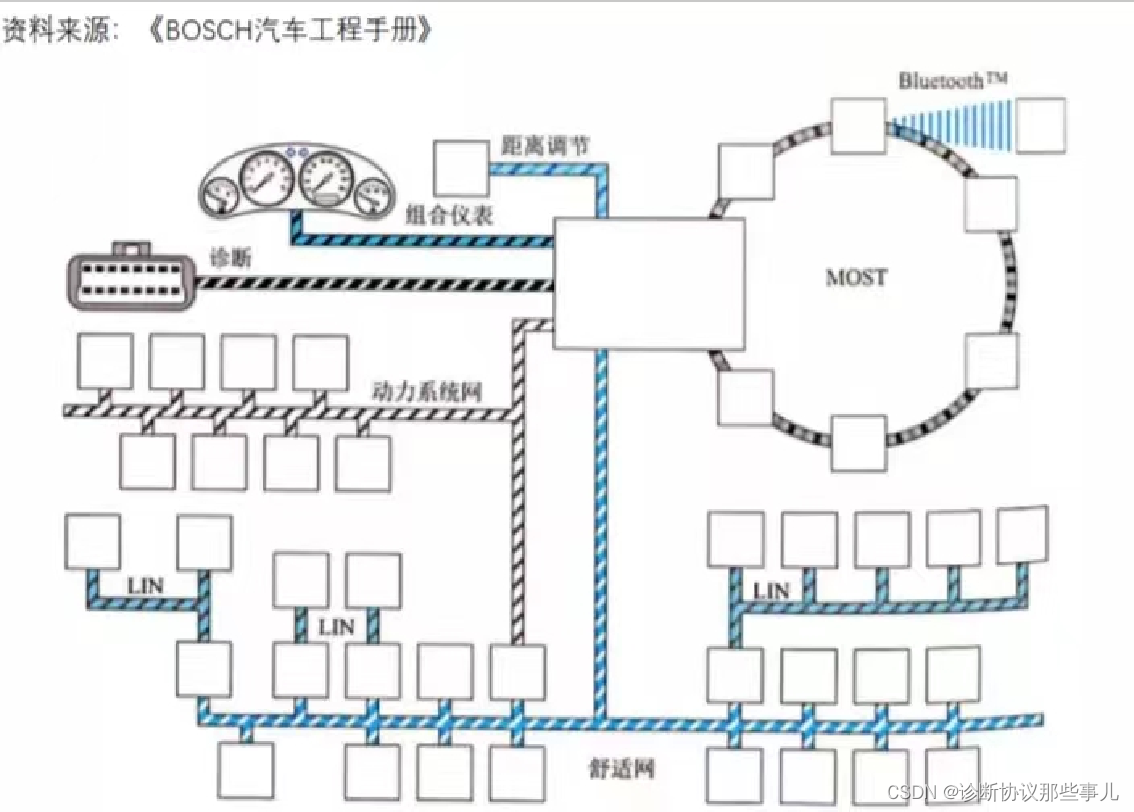
CAN网络细分
按照用途可分为动力CAN网络、车身CAN网络、诊断CAN网络……
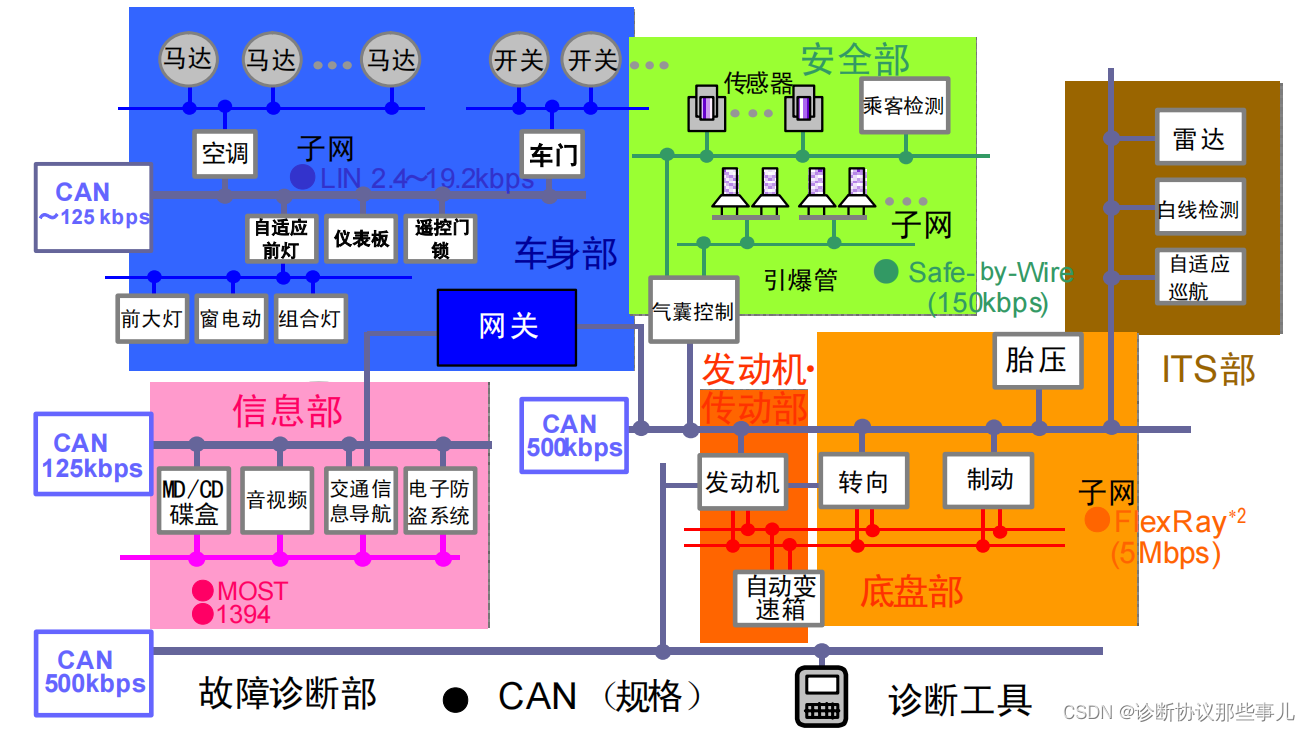
来源BOSCH汽车工程手册
三、CAN发展历史
①1983年,德国Bosch开始研究汽车网络技术
②1986年,Bosch在SAE大会正式公布CAN协议
③1987年,Intel和Philips先后推出CAN控制器芯片
④1991年,Bosch颁布CAN 2.0技术规范,CAN总线最先在Benz S系列轿车上实现
⑤1993年,ISO颁布CAN国际标准ISO-11898
⑥1994年,由CiA组织举办第一届国际CAN大会(iCC)
⑦2015年,CAN FD的 ISO标准化
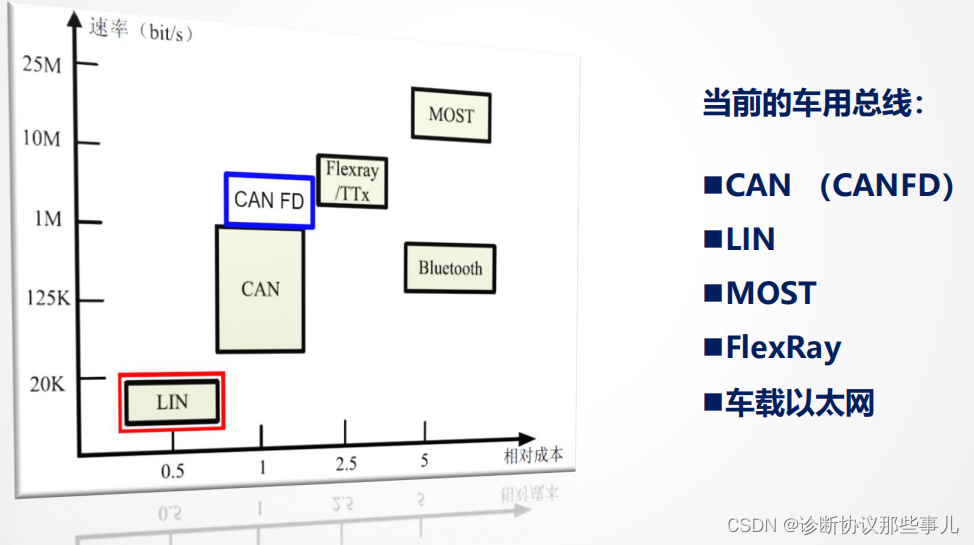
四、汽车网络汇总
总结
以上就是今天要讲的内容,欢迎大家评论,提出宝贵意见,如对您有所帮助可以点赞+收藏。
![[AI] LRTA*ls(k)搜索算法](https://img-blog.csdnimg.cn/ea974a2a0cb940728258eb4877d2502e.png#pic_center)