电机在工业控制中的地位不言而喻,所以对电机模型的了解是我们理解各种算法的基础。这篇博客帮大家整理总结。张力控制离不开电机控制,有关张力控制的详细内容请参看下面的文章链接:
PLC张力控制(开环闭环算法分析)_张力控制算法_RXXW_Dor的博客-CSDN博客里工业控制张力控制无处不在,也衍生出很多张力控制专用控制器,磁粉制动器等,本篇博客主要讨论PLC的张力控制相关应用和算法,关于绕线机的绕线算法,大家可以参看专栏的另一篇文章,这里不再赘述,链接地址如下:SMART 200PLC绕线机控制应用(时基控制算法)_RXXW_Dor的博客-CSDN博客绕线机PLC控制应用涉及到编码器的速度采集和高速计数,相关内容可以参看如下博客PLC通过编码器反馈值计算速度的推荐做法(算法解析+ST代码)_RXXW_Dor的博客-CSDN博客_编码器计算速度程序实例。https://blog.csdn.net/m0_46143730/article/details/126898196
电机控制中的2个重要变量:
电机控制中的2个重要变量(速度和转矩)_RXXW_Dor的博客-CSDN博客电机控制的其它相关内容,大家可以参看专栏的系列文章,链接如下:运动控制系统(伺服3环)_运动控制三环控制周期_RXXW_Dor的博客-CSDN博客1 、这篇作为运动控制系列的第一篇吧,后续慢慢更新关于PLC的运动控制。https://blog.csdn.net/m0_46143730/article/details/129310417
1、电机机械系统
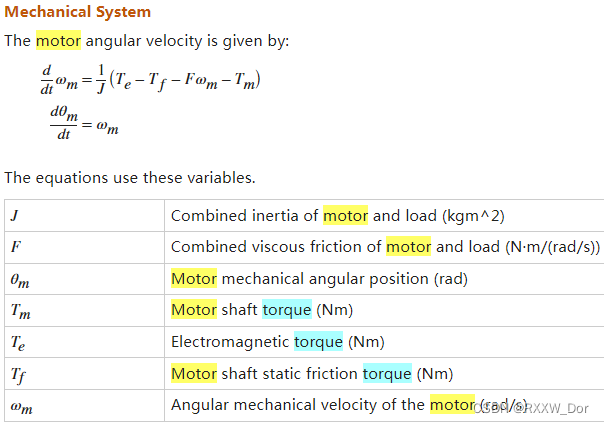
上面这幅图是MATLAB官网上对感应电机机械系统的描述(动力学微分方程),下面带大家一起简单分析下:
1、Tf---Motor shaft static friction torque (Nm);电机轴静摩擦扭矩(这个参数其实非常复杂,世界性难题,静摩擦扭矩的产生大家可以看分析力学、哈密顿力学、拉格朗日力学的相关书籍)。
2、Tm---负载折合到电机轴端的扭矩 单位:Nm;
3、ωm---电机轴角速度 单位 rad/s;(可以通过电机轴端编码器测量、无PG时采用观测器预估)
4、θm---Motor mechanical angular position (rad) 电机机械角位置 单位:弧度rad;
5、F---Combined viscous friction of motor and load (N·m/(rad/s)) 电机和负载的组合组合粘性摩擦力;
6、J---Combined inertia of motor and load (kgm^2) 电机和负载的组合惯量;
从上面的动力学微分方程可以看出,转矩模式时电机的速度由动力学方程描述。转矩模式时,速度和位置环都是开环状态,通常我们都需要对速度进行限幅,防止负载突然丢失的飞车情况发生。一般伺服在空载时,转矩10% 速度可以上到1000rpm左右,这时的转矩刚好对抗电机转子摩擦转矩。
2、电磁转矩计算方程

转矩模式的本质是控制电流(所以内环也叫电流环)。电流的计算有park和clark变换,clark变换的博途PLC计算仿真(只是理解算法,PLC计算没有任何其它意义),可以参看下面这篇文章:
如何用博途PLC完成Clark变换仿真(含Simulink仿真)_RXXW_Dor的博客-CSDN博客Clark变换需要实现静止的三坐标到静止2坐标的变换,实现a-b-c坐标系到alpha-belta坐标系的变换,这是Clark变换的定义。我们先看下Clark变换在Simulink里的实现过程,之后在博途PLC里我们编写一个Clark变换的FC,再在博途示波器里观察变换波形。本篇博客只是抛转引玉,提供另一个思路让大家体会不同的学习方法。博途PLC里的Clark变换仿真,学习意义大于实际应用。因为大部分Clark变换都是在嵌入式或者DSP上完成。https://blog.csdn.net/m0_46143730/article/details/128709088未完.




![[ROC-RK3399-PC Pro] 手把手教你移植主线Buildroot(基于2023.02-rc3版本)](https://img-blog.csdnimg.cn/a4a420ba60fb4a618bb8ea1b3a9e4f53.png)


![[计算机组成原理(唐朔飞 第2版)]第三章 系统总线(学习复习笔记)](https://img-blog.csdnimg.cn/a79ef94d6a4c4fe984f1428eee44cb0c.png)