文章目录
- 01 单相半波整流电路
- 02 单相全波整流电路(子系统封装模块)
- 03 三相桥式整流电路(三相模块与示波器使用)
- 04 相控与斩控交交调压(THD计算)
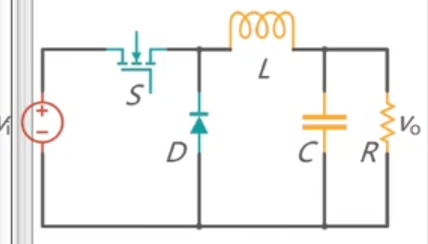
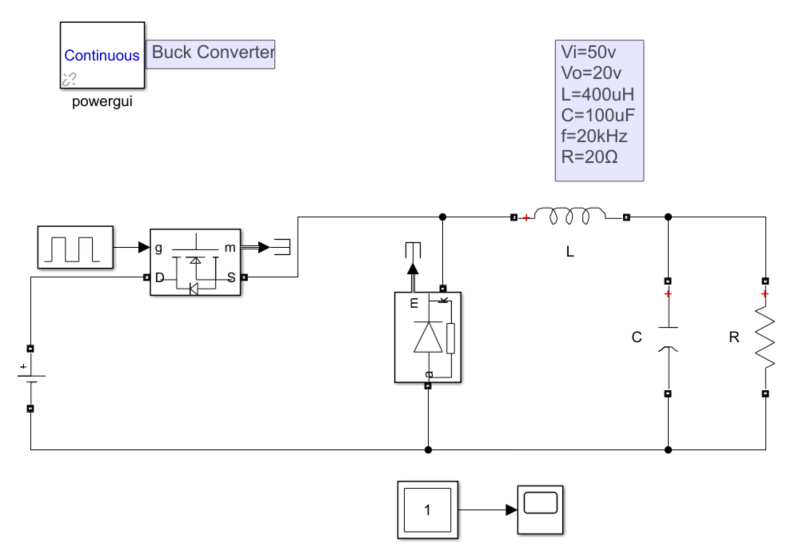
- 05 Buck电路(PWM实现与闭环反馈)
- 06 单端反激(离散系统仿真)
- 07 隔离正激(仿真嵌入式c/c++)
- 08 无源逆变器的控制
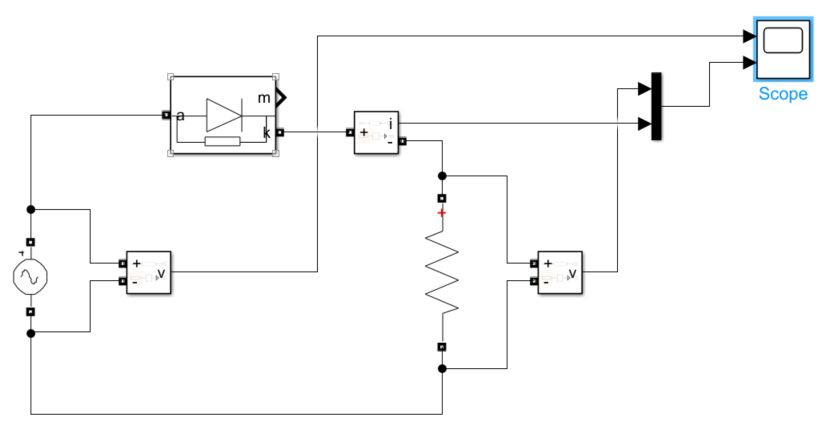
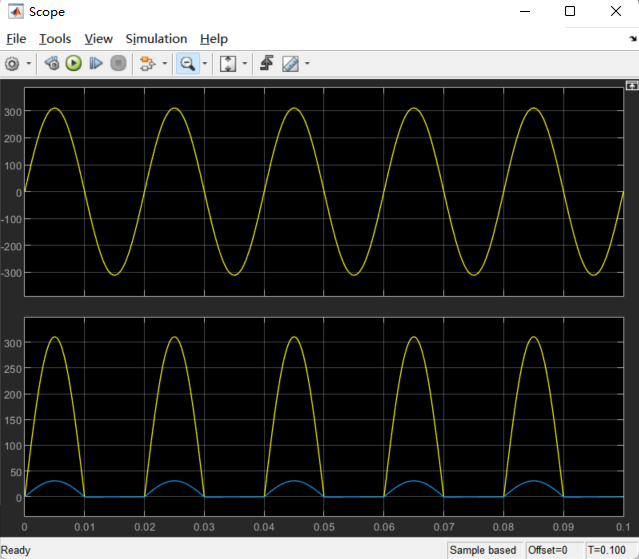
01 单相半波整流电路
搭建系统步骤
- 1、找出元器件搭建主电路并连接;
- 2、设置元器件参数;
- 3、连接测量组件;
- 4、设置仿真参数并运行
- 5、数据分析处理(作图、分析)
02 单相全波整流电路(子系统封装模块)

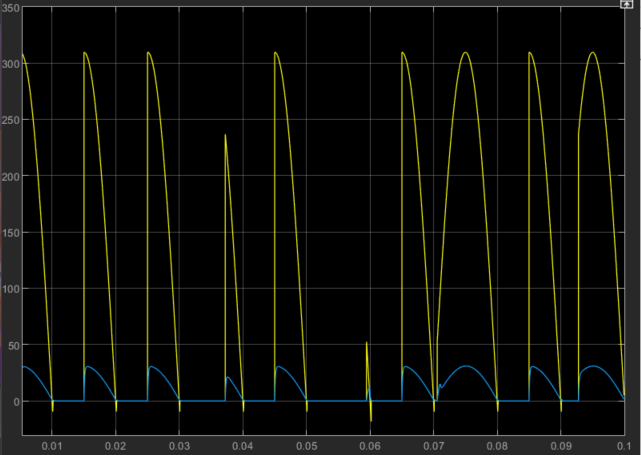
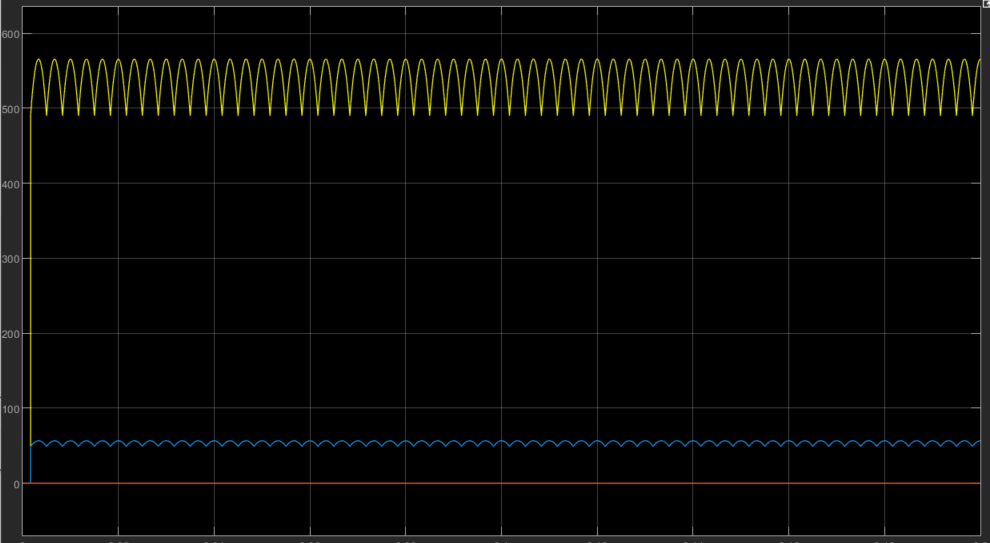
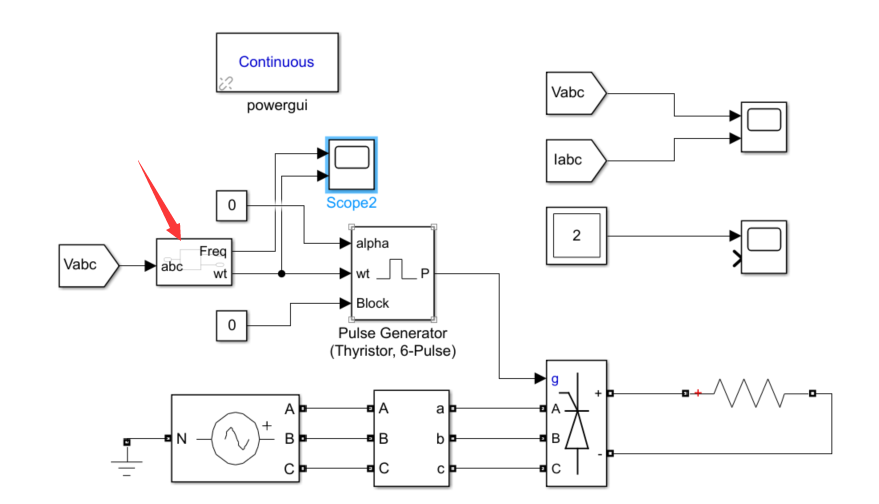
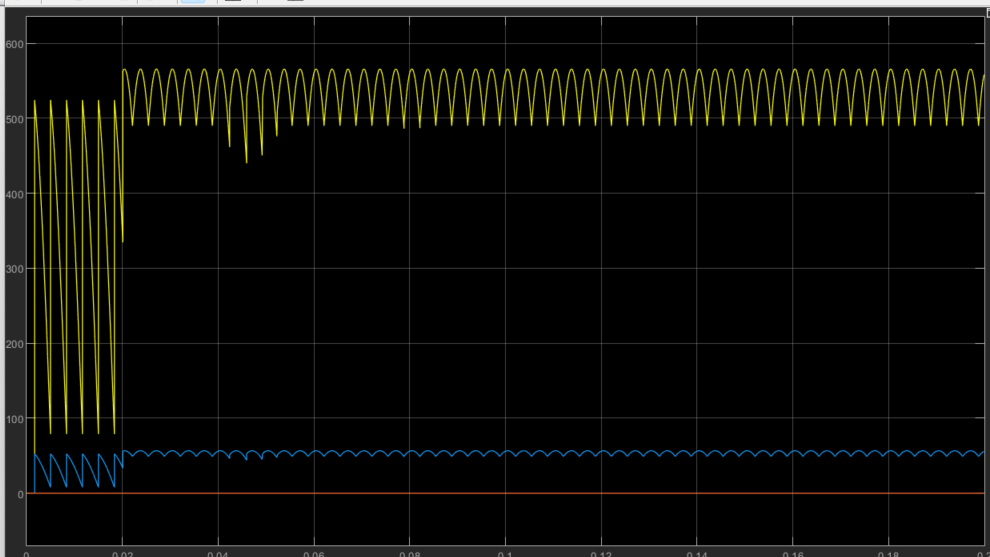
03 三相桥式整流电路(三相模块与示波器使用)
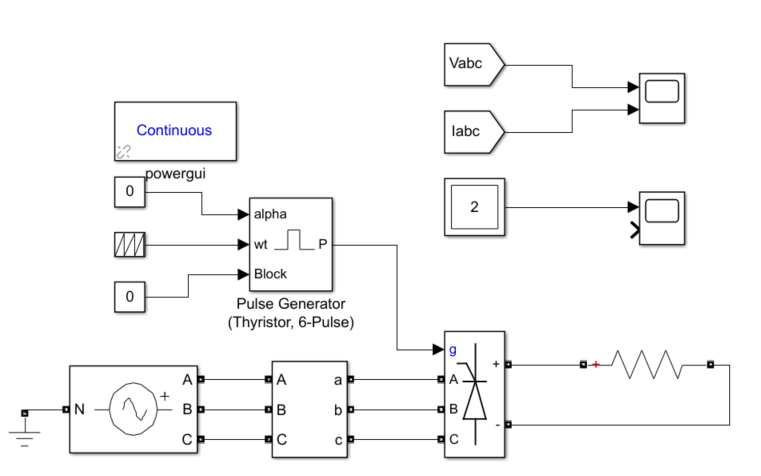
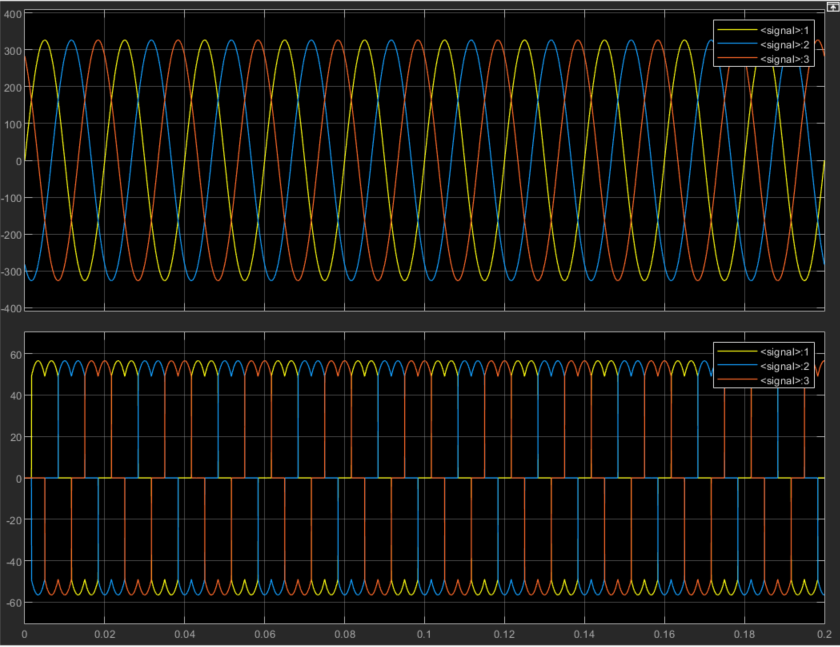
- 锁相环PLL跟踪(初始值不用管)
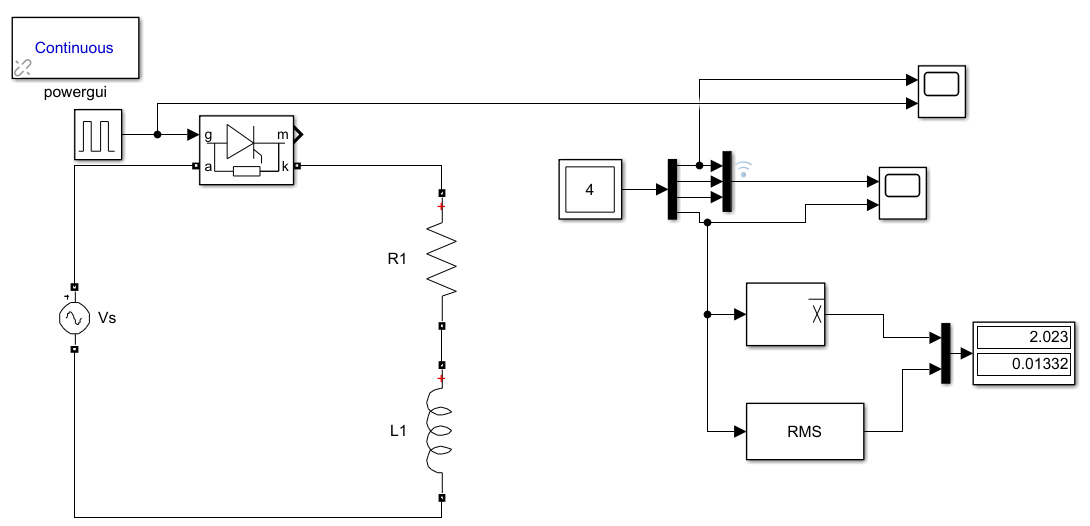
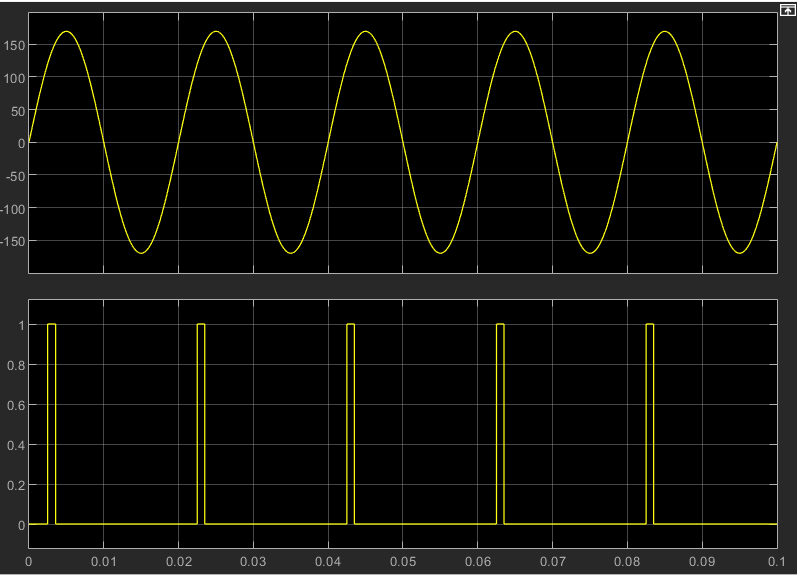
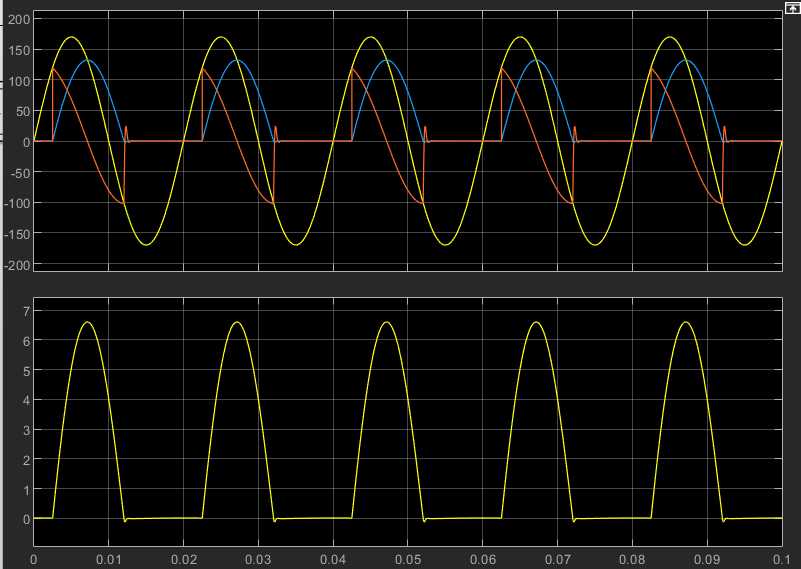
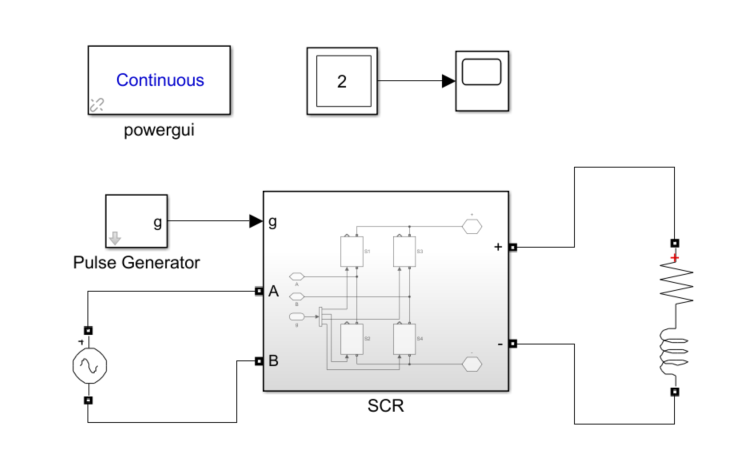
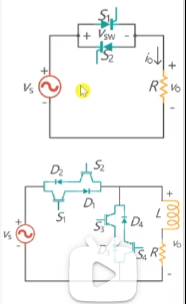
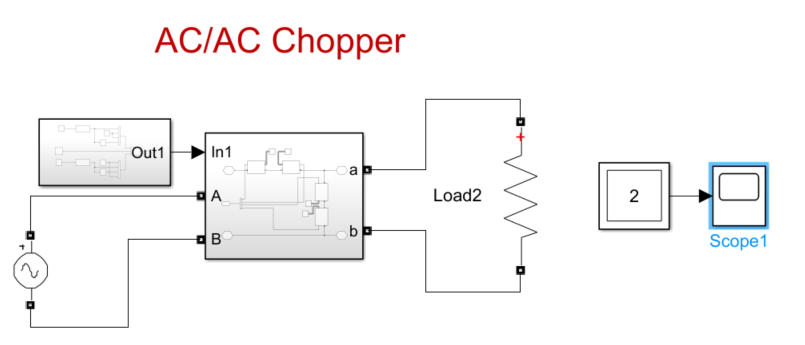
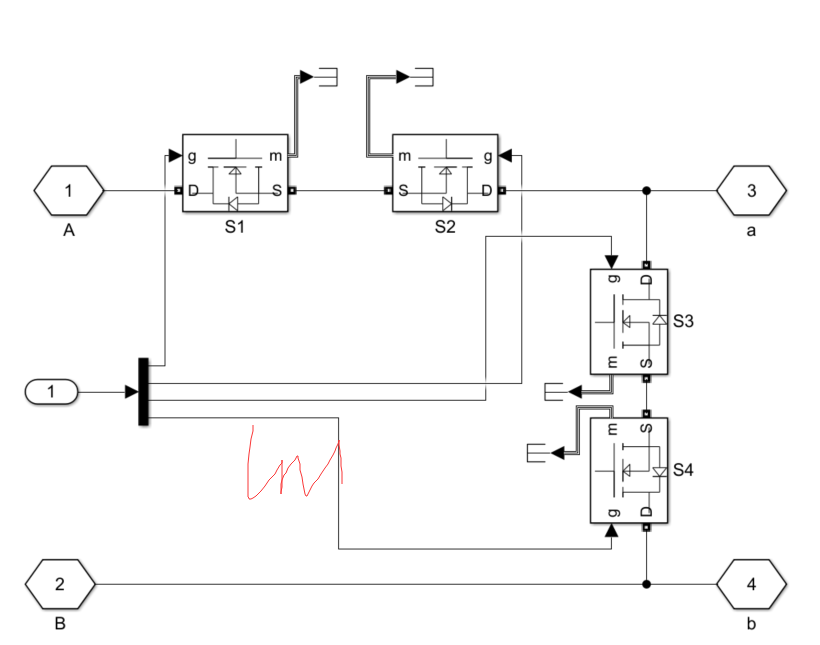
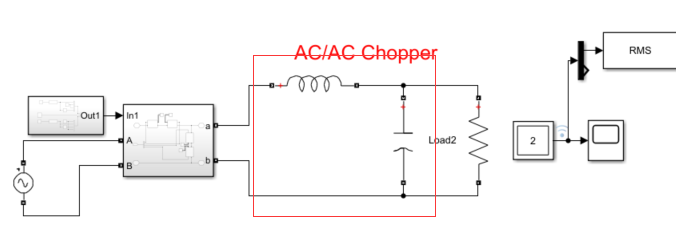
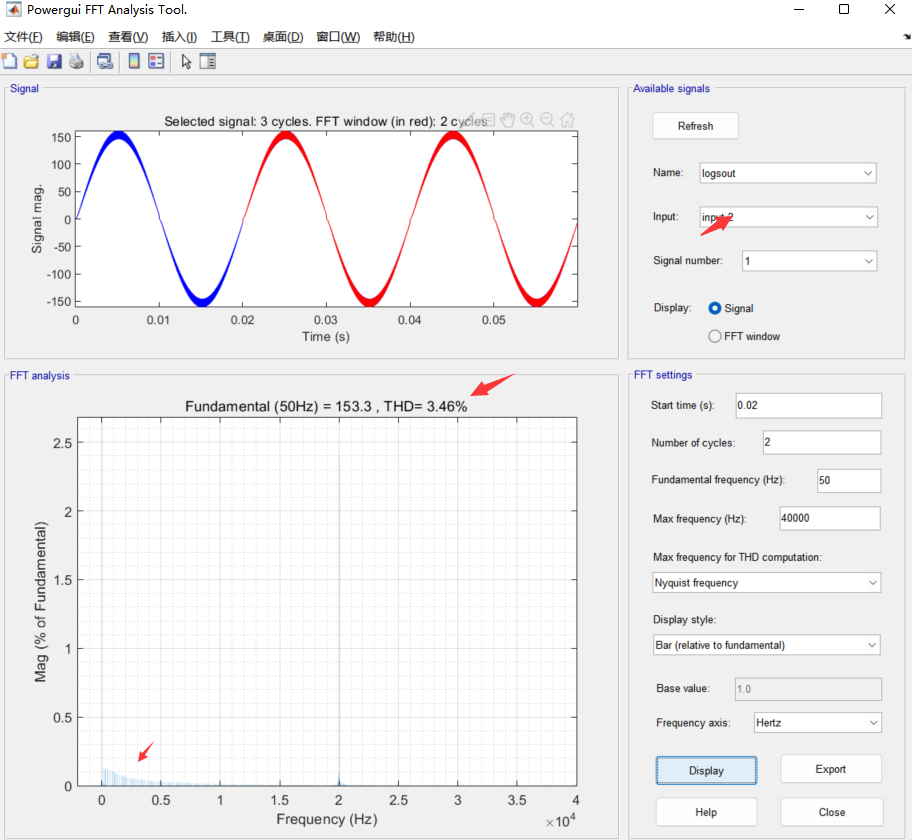
04 相控与斩控交交调压(THD计算)
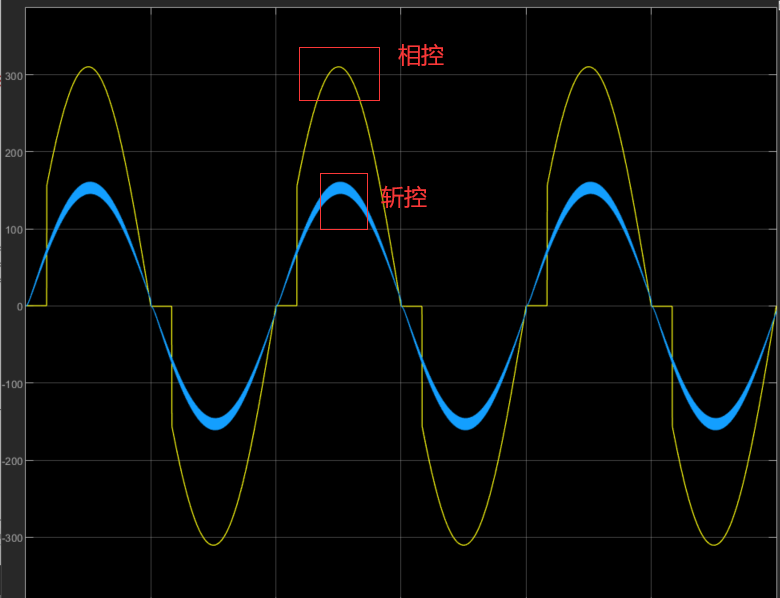
相控使用晶闸管实现
斩控使用全控型器件
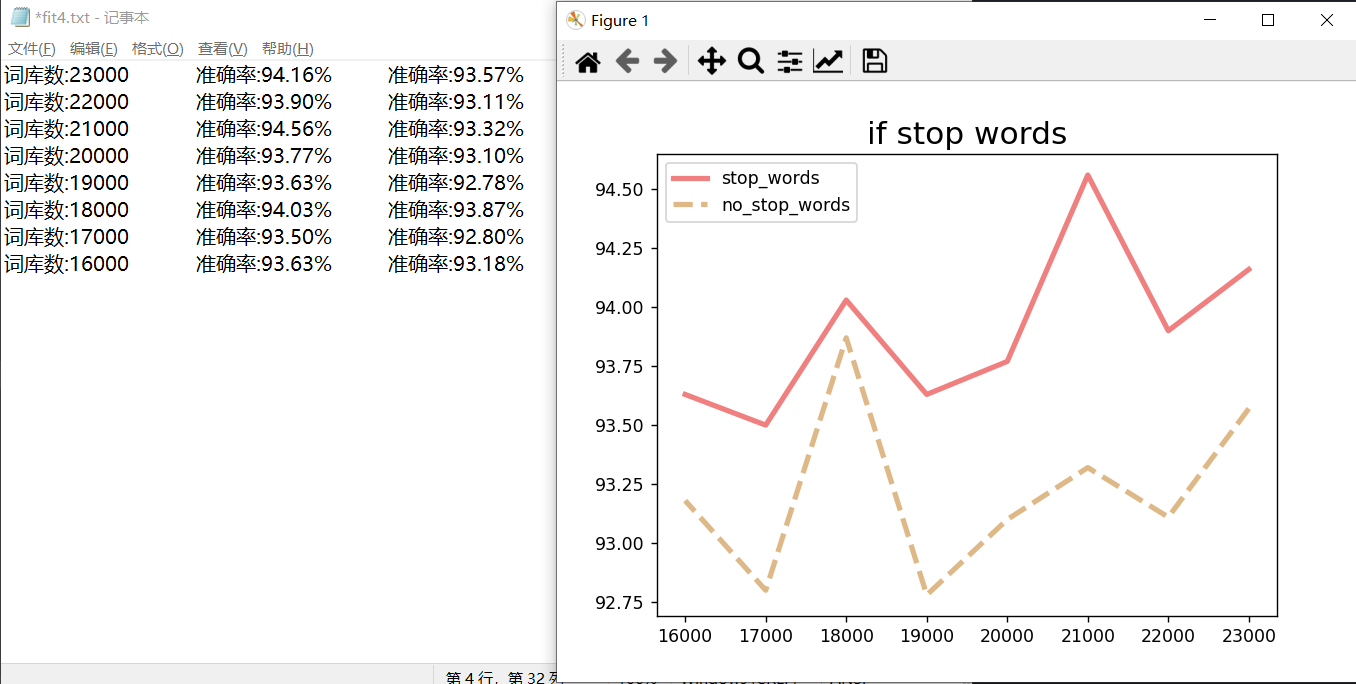
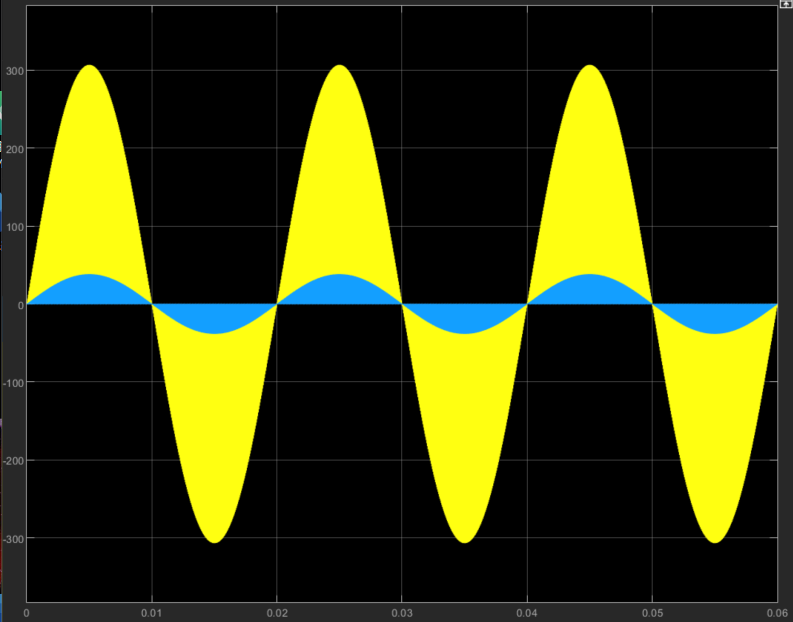
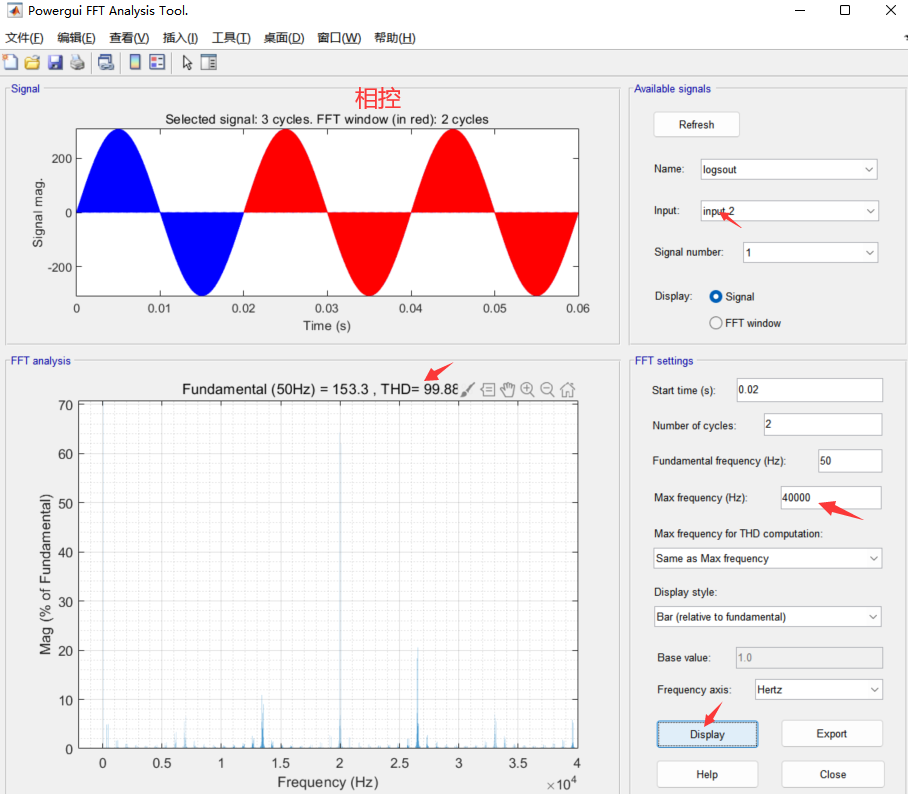
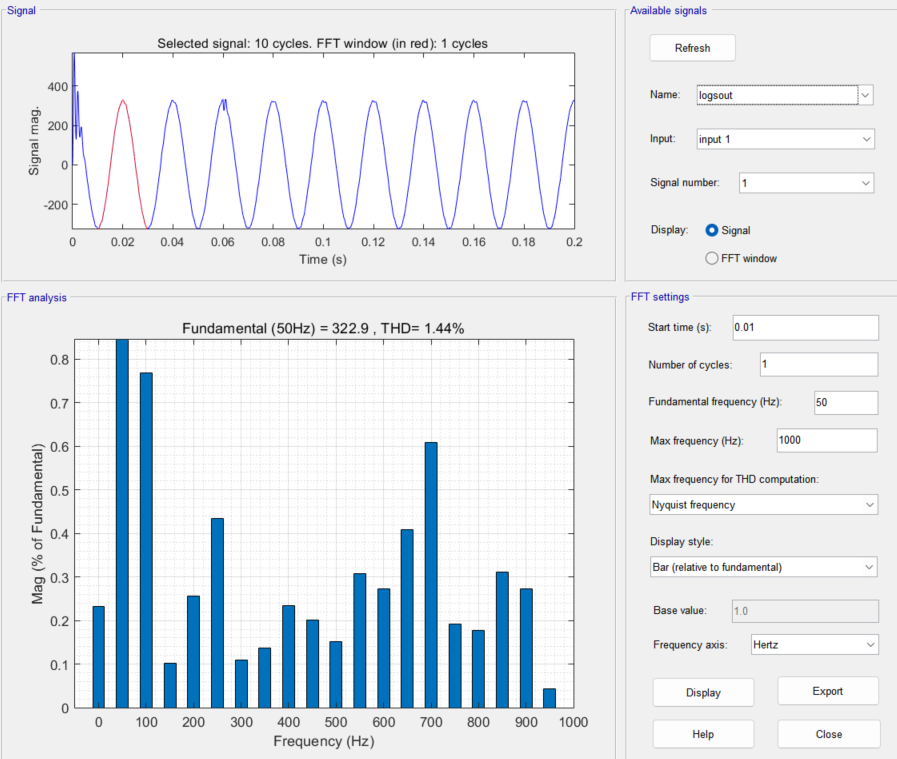
交流输出电压波形质量THD
- 在搭建simulink的过程中,我们不太关心元器件的具体参数,只是多针对器件的原理和电路进行仿真。
- 相控形式
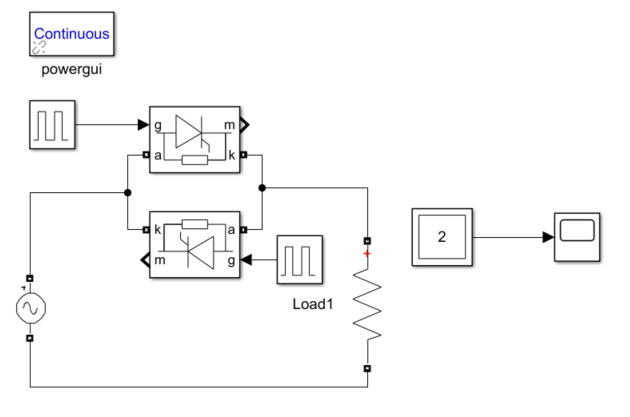
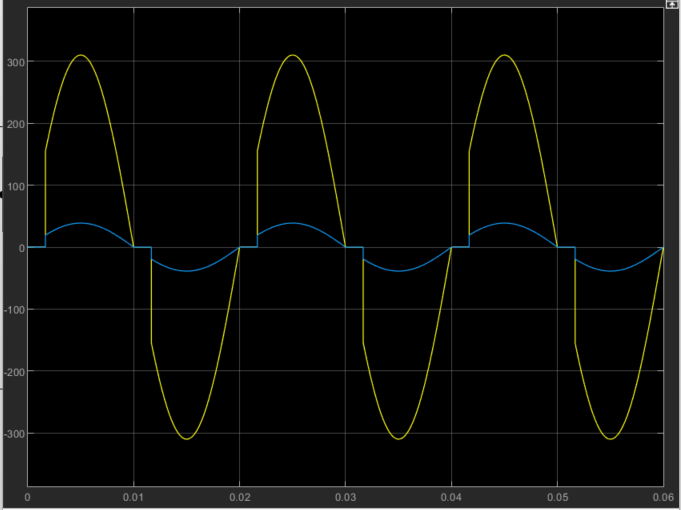
- 斩控形式

- 傅里叶分析(Thd)总谐波畸变率
谐波判别:由于交流电网有效分量为工频单一频率,因此任何与工频频率不同的成分都可以称之为谐波,
谐波产生的原因:正弦电压加压于非线性负载,基波电流发生畸变产生谐波
主要非线性负载有UPS、开关电源、整流器、变频器、逆变器等

电力电子中都是使用功率性器件,使用的是无源滤波的方法。
此处对相控的输出进行LC滤波(L串联,C并联,L(5%以内)、C(谐振频率))
相控斩控的电压对比
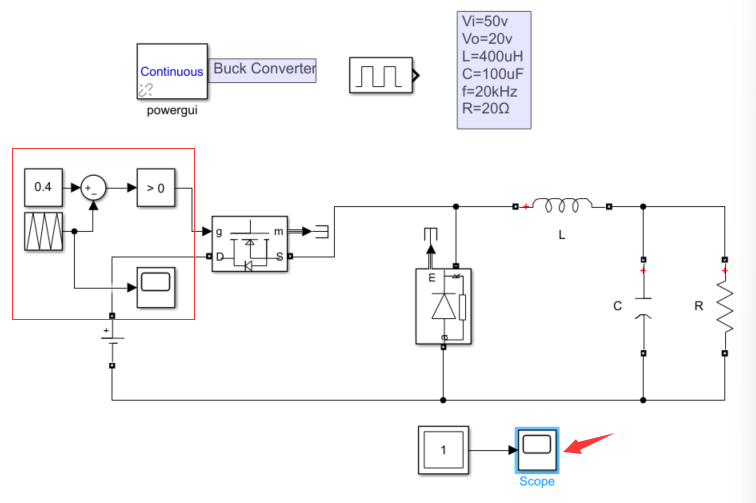
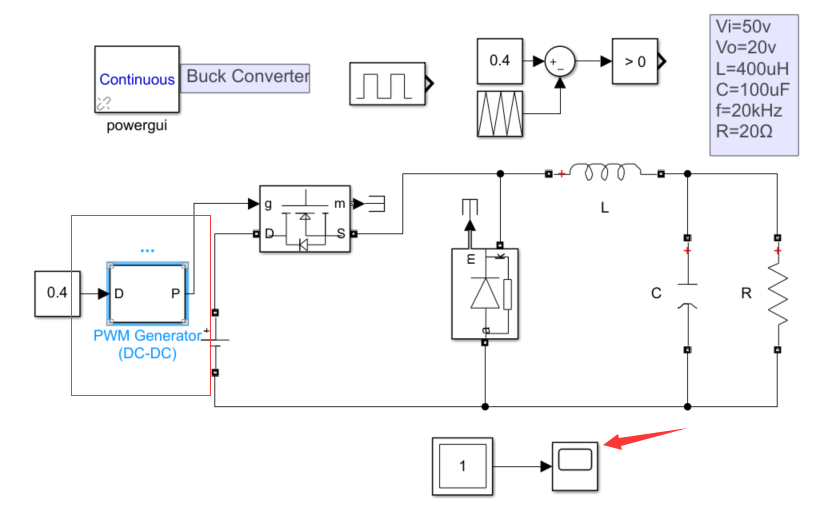
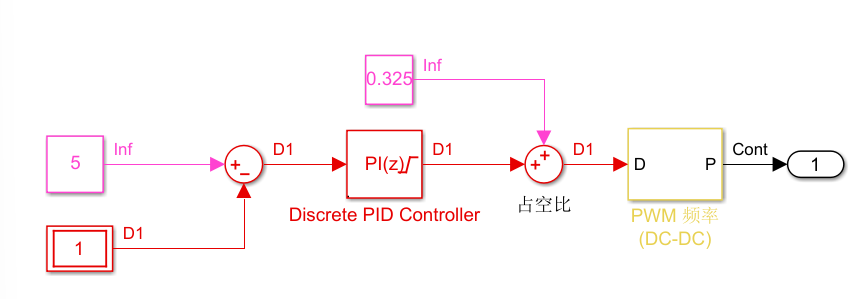
05 Buck电路(PWM实现与闭环反馈)
- 方法一 :使用Pulse Generate进行波形发生。
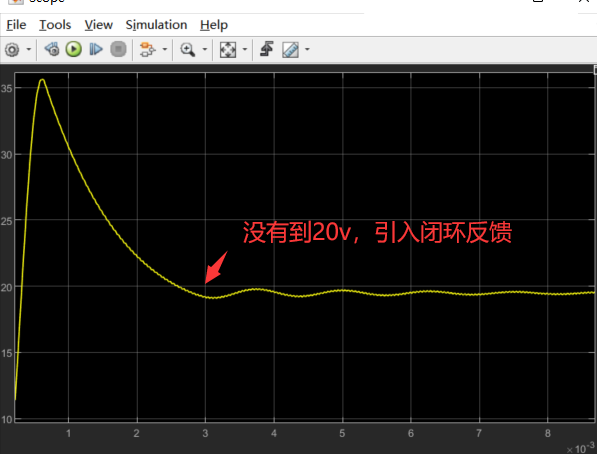
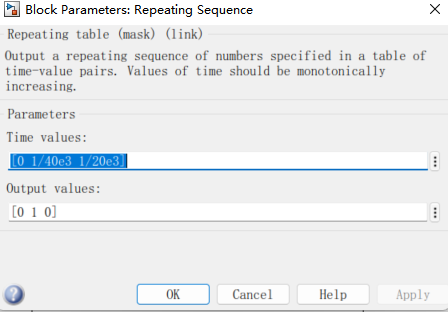
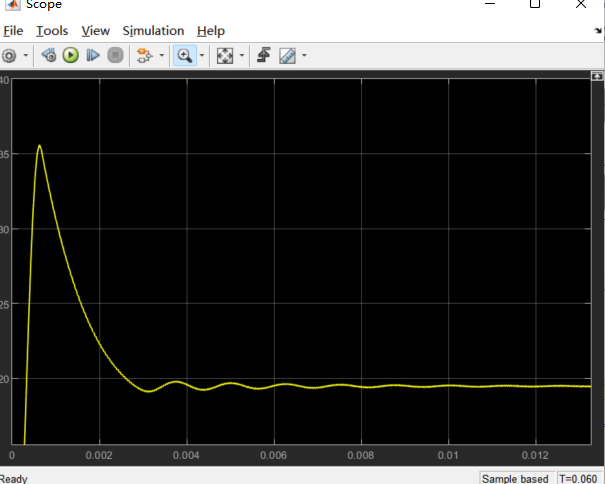
功率元器件有损耗,导致电压达不到20V - 方法二:使用一个调制波(常数)和一个窄波(Repeating Sequence)进行比较
- 方法三:不研究调制的话,可以直接使用,,,,,推荐
matlab关注的是原理和控制,而不是单纯的元器件上
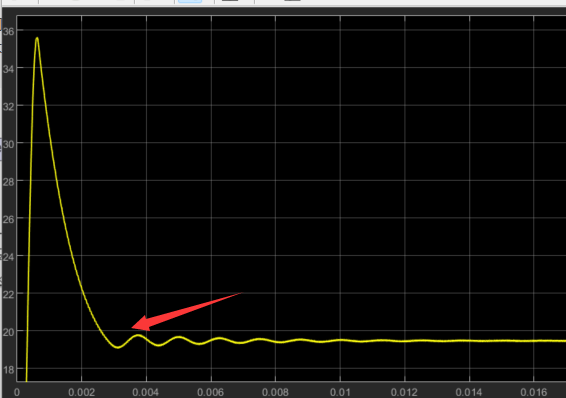
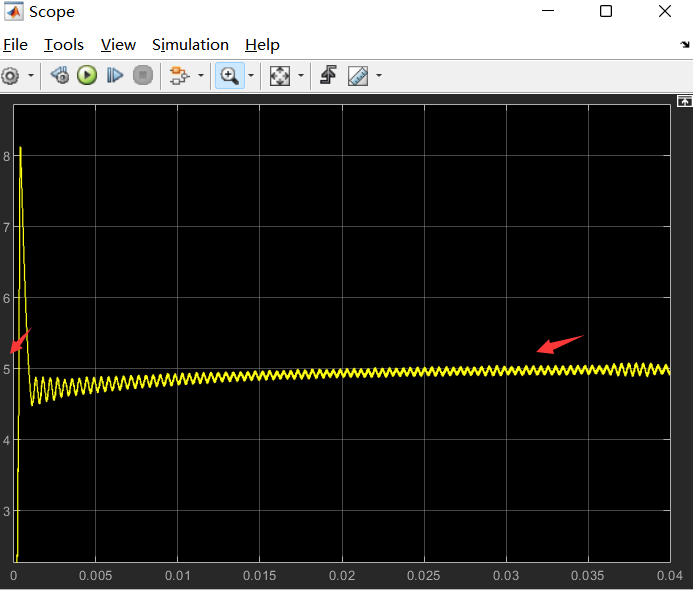
- 闭环控制的方法:不使用的话,会有稳态误差ΔE,
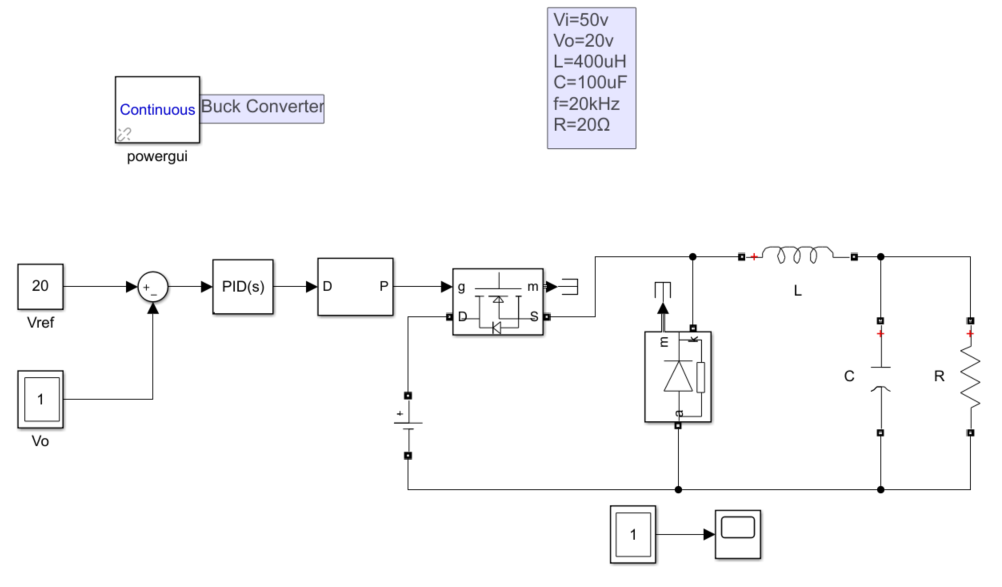
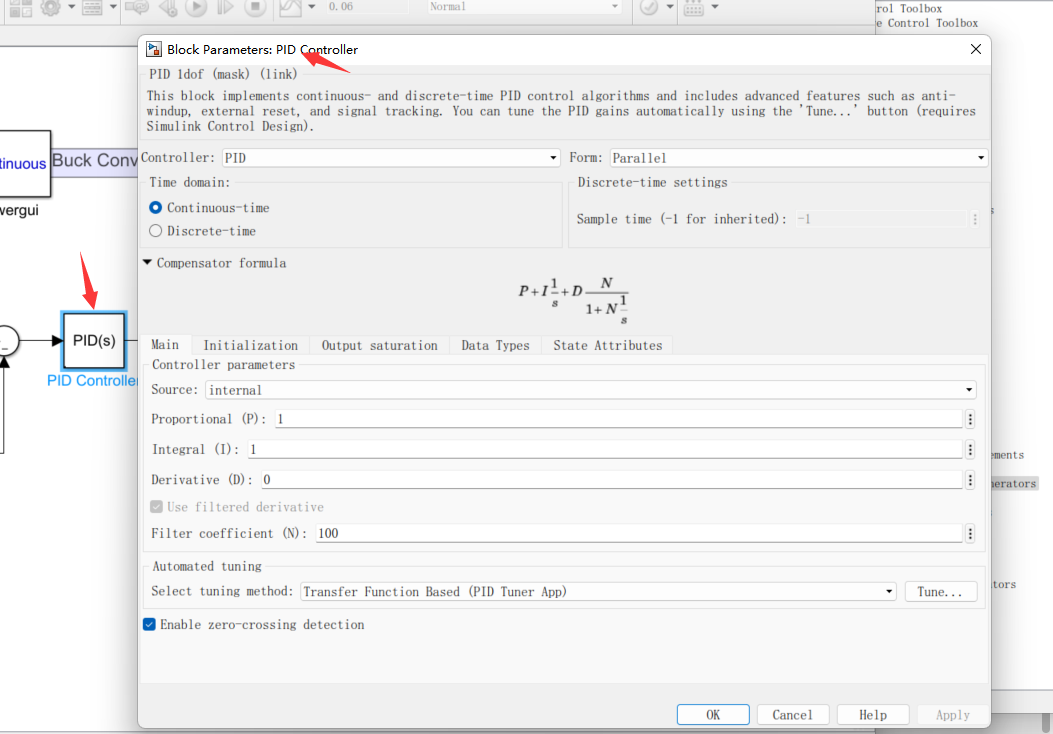
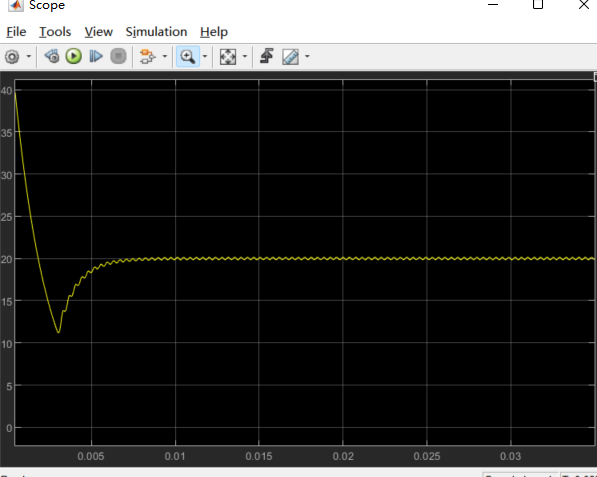
闭环的位置式PID - 复合控制:加入开环控制
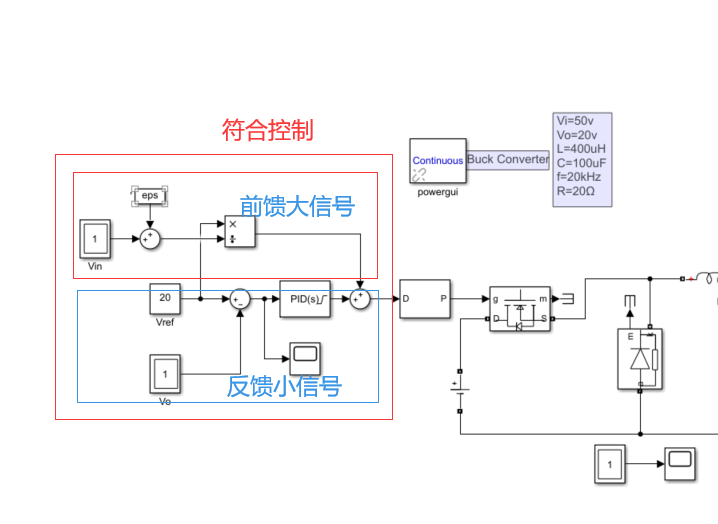
复合控制的结果,稳态来的更提前了,增量式PID
06 单端反激(离散系统仿真)
在现实的情况下,我们使用MCU等进行控制,使用采样的方式。
那么就会导致连续的模拟量变成了离散化
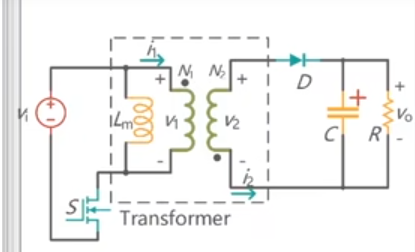
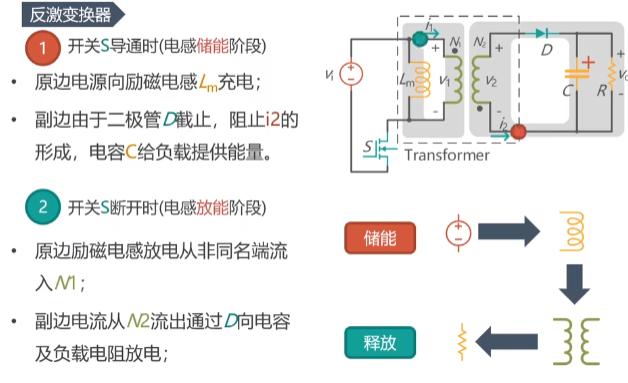
- 反激变换器原理
- 仿真搭建
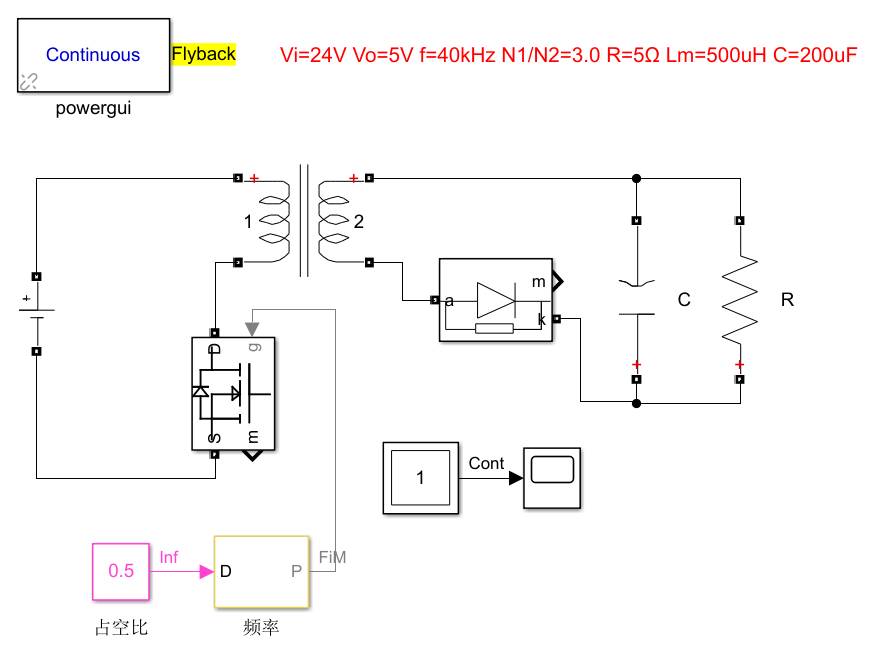

- 连续改离散设置
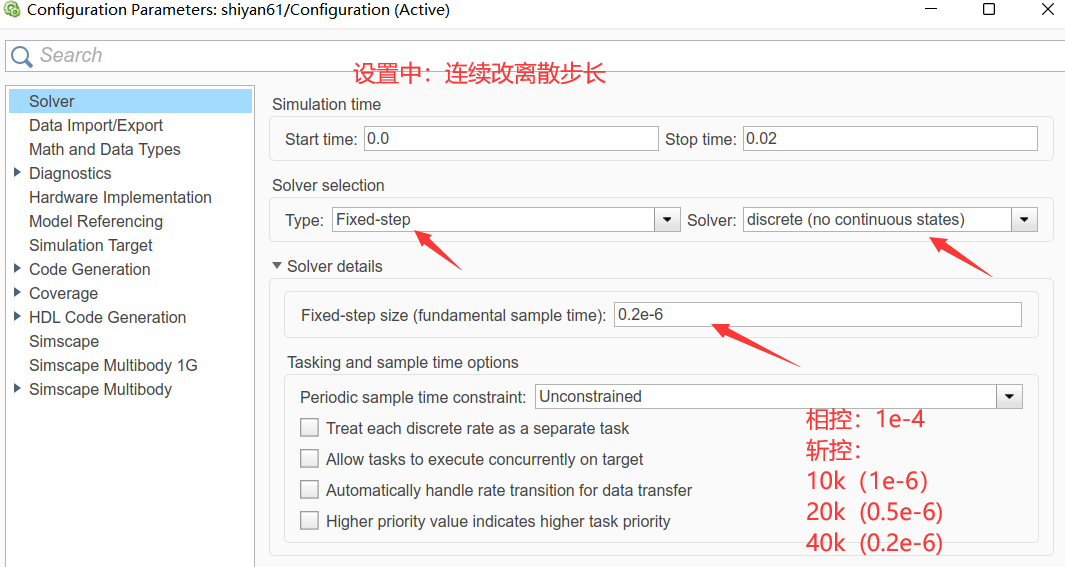
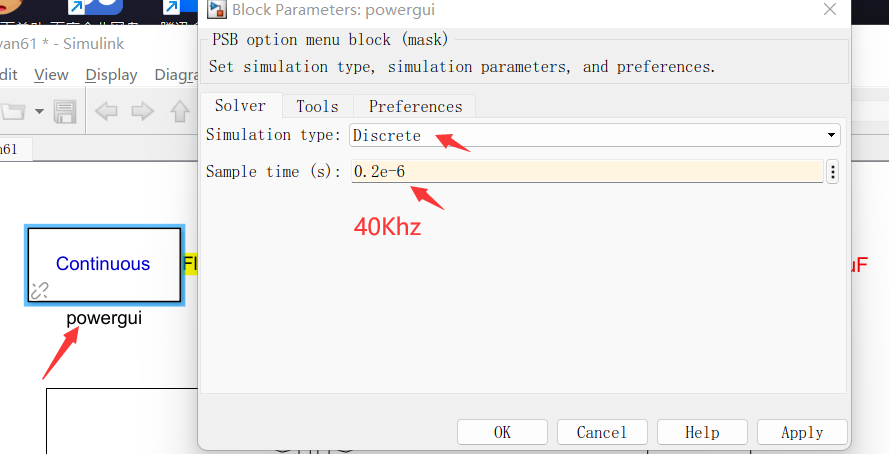
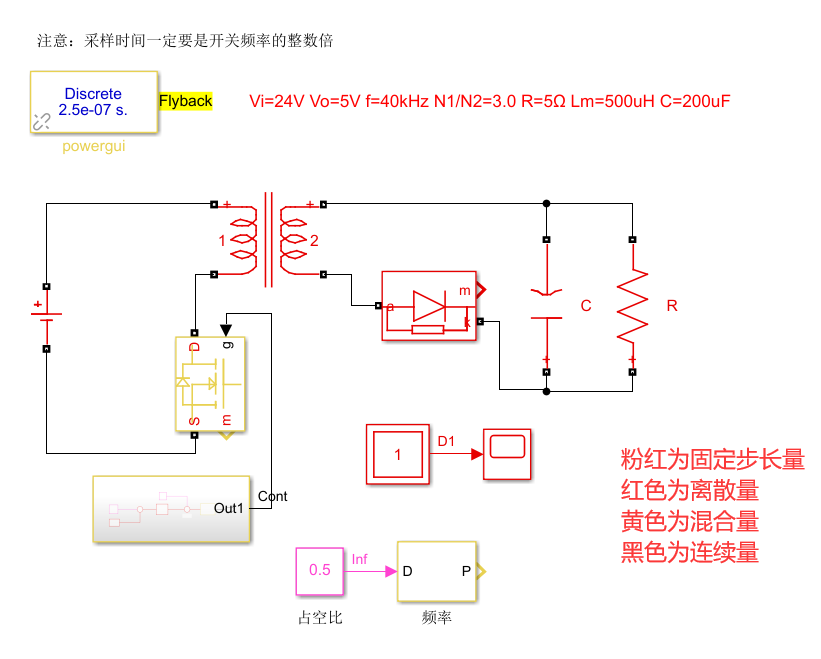
离散量的采样,引入了零阶保持器
最后加入z-1,跟我们显示中更加接近
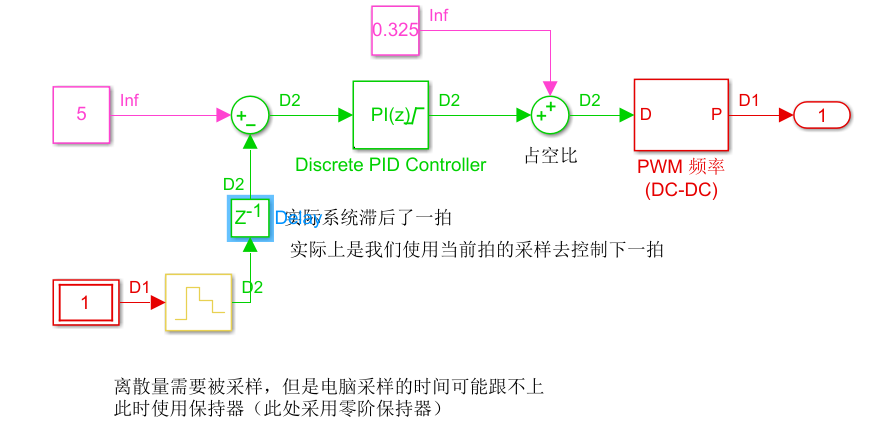
现实中我们应该都用离散的量去仿真,这样更接近显现实中的控制情况
07 隔离正激(仿真嵌入式c/c++)
- 正激变换器的由来
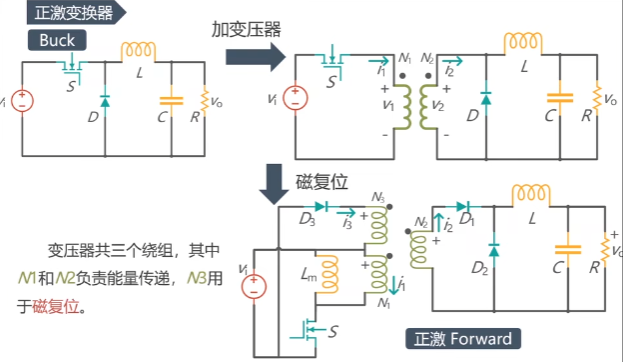
- 正激变换器的原理
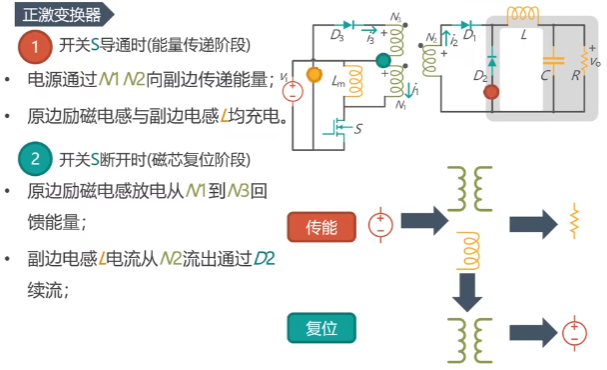
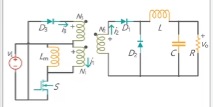
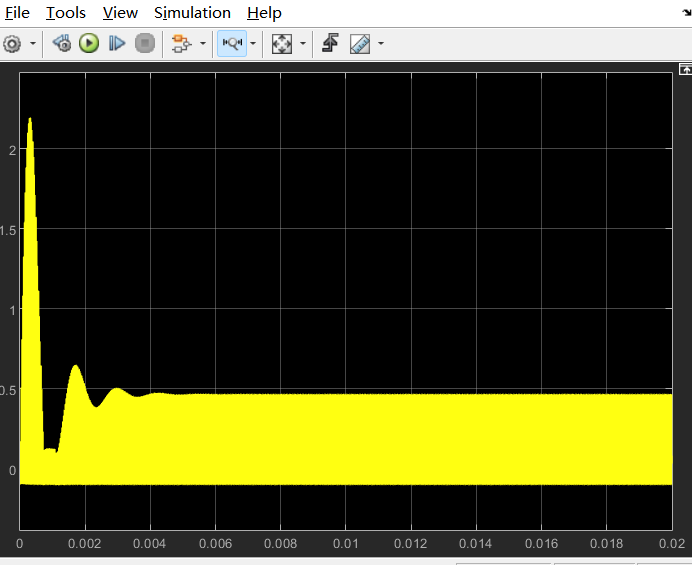
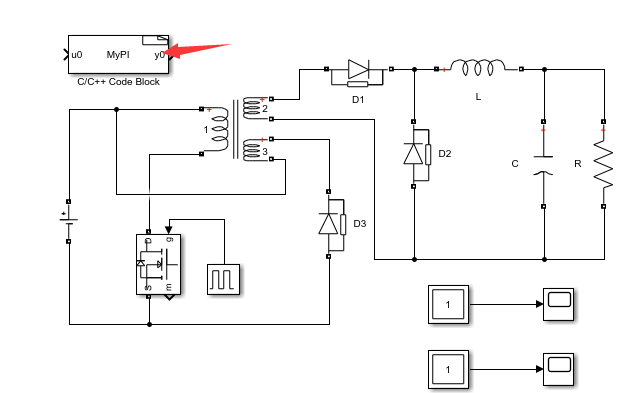
- 仿真搭建

-》放大,观察励磁线圈是否进行了磁复位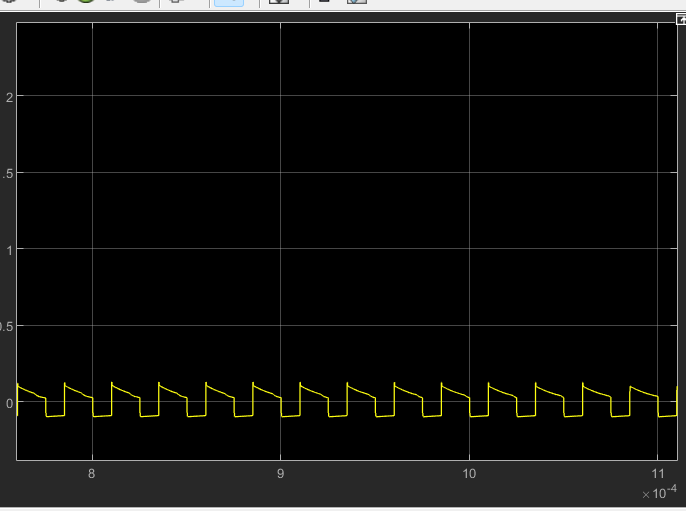
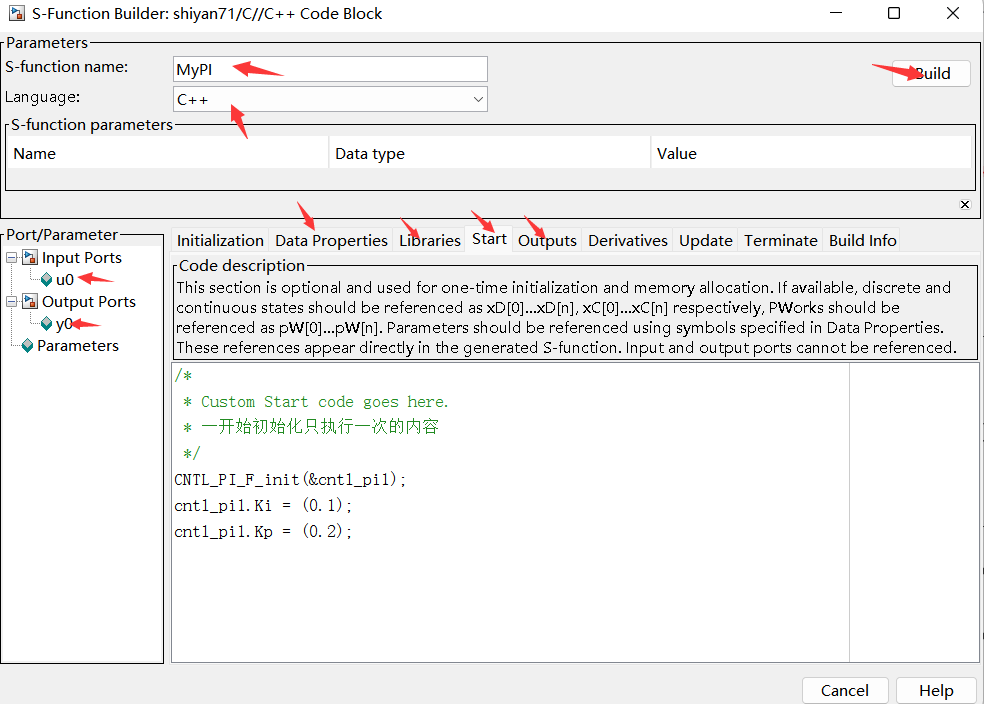
- 现有的C语言使用在我们的仿真中
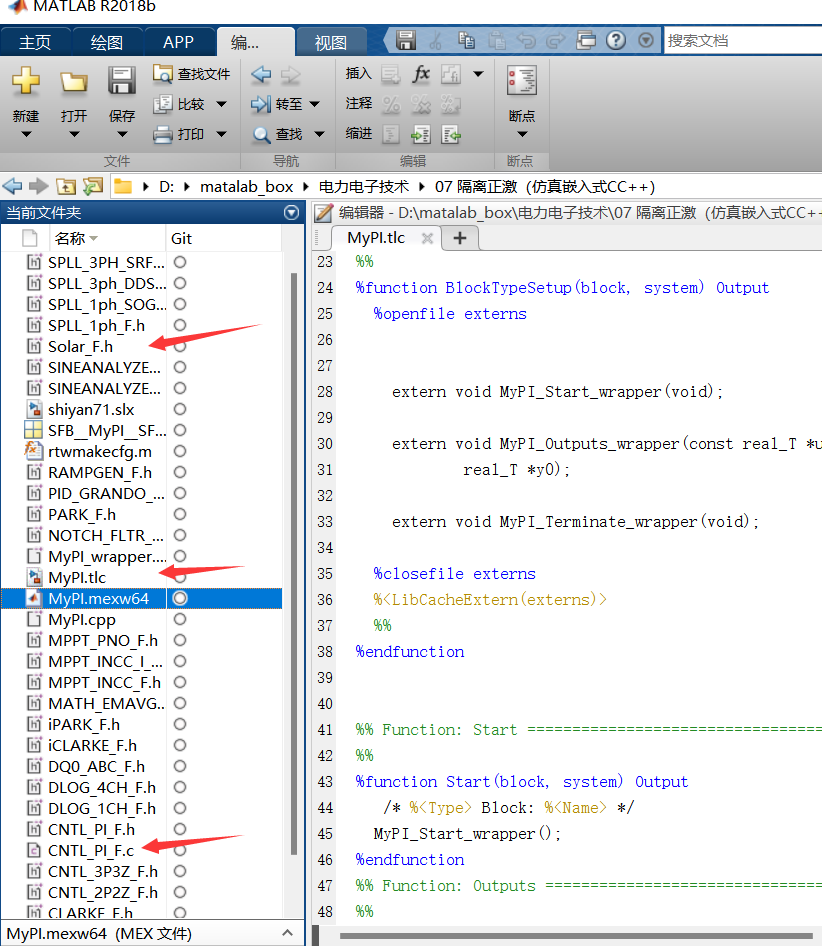
C2000的库,下载controlSUITE3.4.9setup的安装位置才有(c/c++的库文件)
链接:https://pan.baidu.com/s/12iQFDyESCul1MRbpoIisTg
提取码:68zy
当你写了代码,对自己的代码没有信心,那么此时你可以使用simulink进行仿真。你把你的嵌入式代码嵌入到模块中,与点典型的库模块进行比较下看看

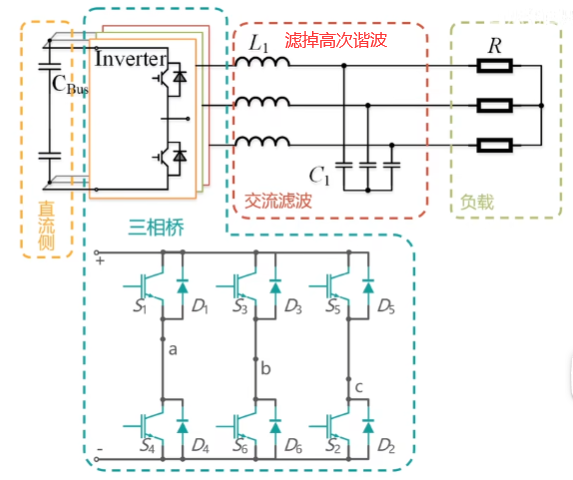
08 无源逆变器的控制
独立逆变(无源负载)和并网逆变(有源负载)
- 独立逆变结构
- 独立逆变测量单元
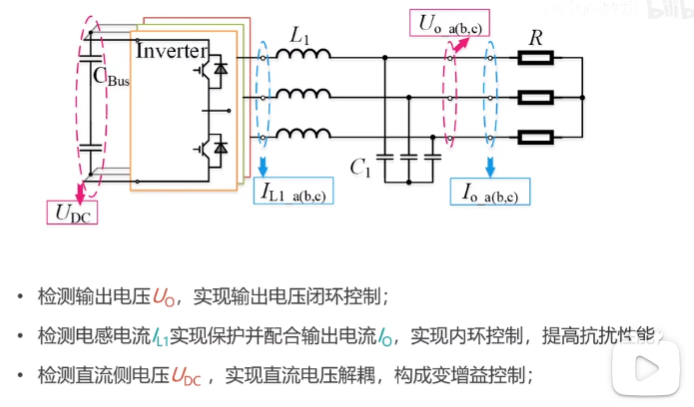
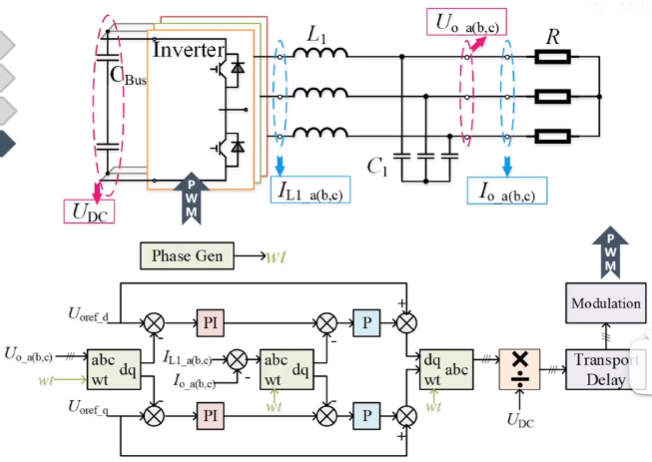
- 独立逆变控制结构
设定稳态工作点的目的是,将大范围的非线性控制转换为小范围的线性化控制,使得调节器的负担减轻

-
独立逆变总体结构:
-
电机FOC控制框图
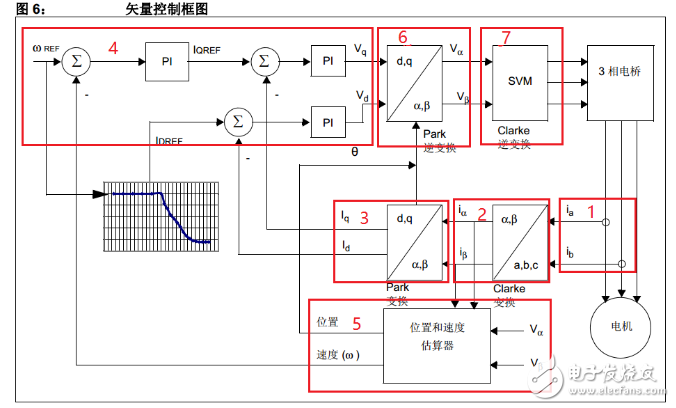
FOC调节流程:
1、检测逆变桥是否正常(MOSFET)。不接电机,使用高级定时器输出6路互补PWM,改变占空比,测量UVW对地波形的占空比是否正常。
2、测试相电流采样电路的功能
1)不接电机,连续相电流采样,此时采样值为相电流为0时的值,此时值应该比较稳定,如果变化较大说明有问题。
2)接上电机,给U相设置占空比为5%,V、W占空比为0,此时用万用表测量取样电阻上的电压值,应该已经有值。再用adc采样相电流,计算相电流采样极性和大小是否正常。
**3、测试变换程序正确性。**其中矢量变换的核心其实就在Clark与Park变换上,通过这两个变换实现了直轴与交轴的解耦,但是用的官方的库可以不管,
4、调试SVPWM模块。通过SVPWM模块可以把FOC的控制结果转换成定时器6个通道的占空比,从而驱动三相逆变模块控制定子绕组产生旋转磁场,拖动转子旋转。为了验证SVPWM模块的功能。产生开环的旋转磁场。
1)把FOC其他部分注释掉,只保留反park变换和svpwm模块
2)反park变换的输入参数有3个:vq=minval、vd=0、Angle=0,接电机上电,此时svpwm会有输出,电机有力,转子被锁定在当前电角度位置,如果没有力,说明vq太小了。
3)将Angle由0开始,每次增加30°左右,此时电机会跟着旋转,且每次旋转的角度是相同的,记录下这个旋转的方向,这就是此系统固有的正方向。此时还还可以验证电机的磁极对数,用笔进行标注(若Angle重复增加N个周期后电机回到起始点),电机的极对数即为N
5、调节电流环
先D轴后Q轴
D\Q 轴的PI是独立的,所以是分开来调的
D轴PI调试:
1、把速度环的PI都设定为0
2、把Q轴的PI也设置为0
3、把速度环的输出(参考值id、iq)也设定为0(其实这步是为了保险,其实PI设置为0就够了)
4、电流环输出的Ud使用反馈回来的Ud,Uq自己手动给定
5、给你D轴的P,慢慢调试I
测试:查看反馈的Id是否在0附近波动,注意是很小的波动(空载0-0.5A成功)
Q轴PI调试:把调试D轴得到的值直接用上
1、把调试D轴的参数限制去掉,速度依然PI设定为0
2、令速度环的输出参考值id为0,速度环的输出iq给定一个比较小的值
3、给定Q轴的I,慢慢调试P(其实也可参考PID调参步骤)
在很小的给定iq下,速度会跑到最高,加少量负载速度会下降
6、速度环就PID常规方法调=调节 -
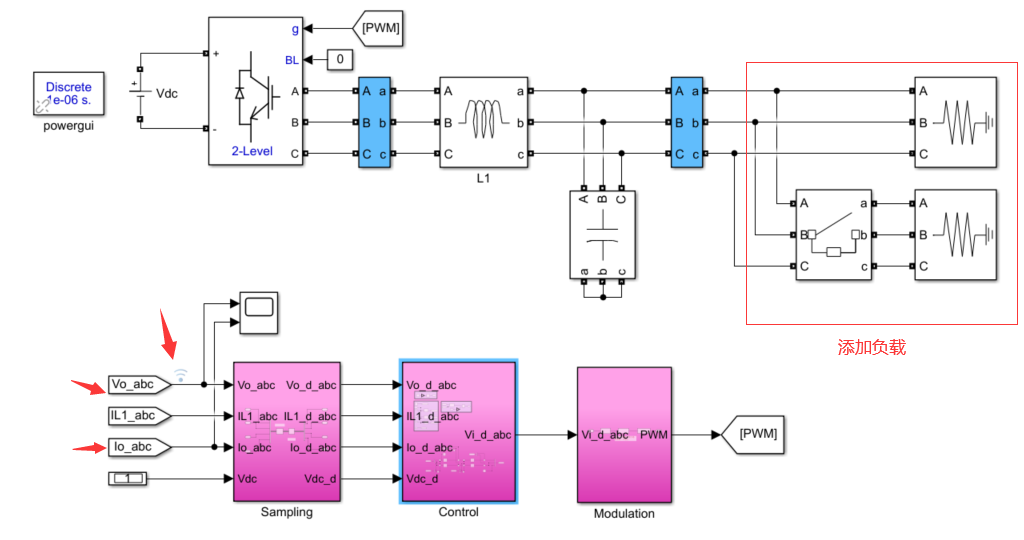
独立逆变仿真搭建:

采样
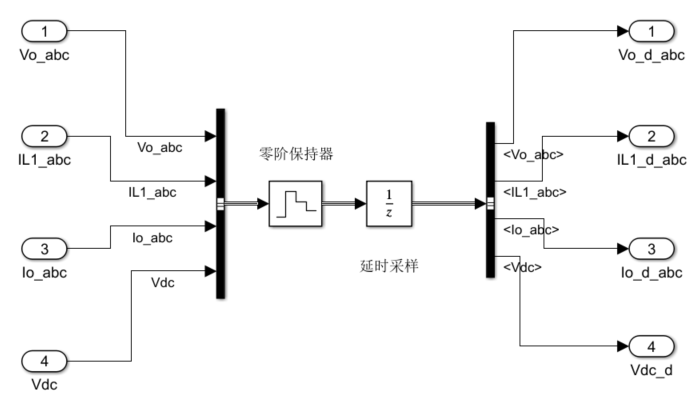
控制
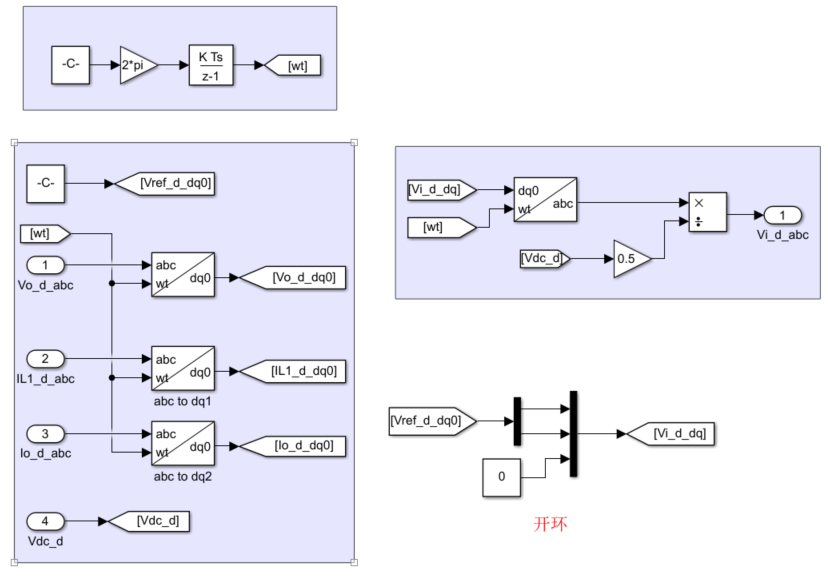
波形调制

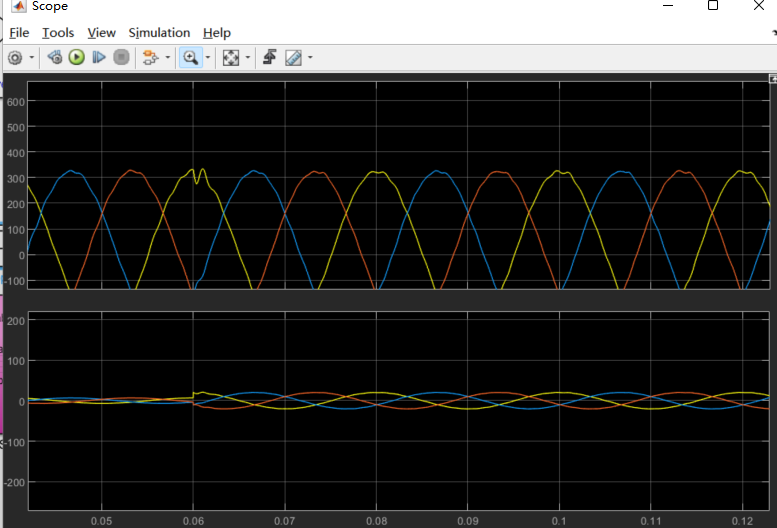
scope显示Vo_abc

-
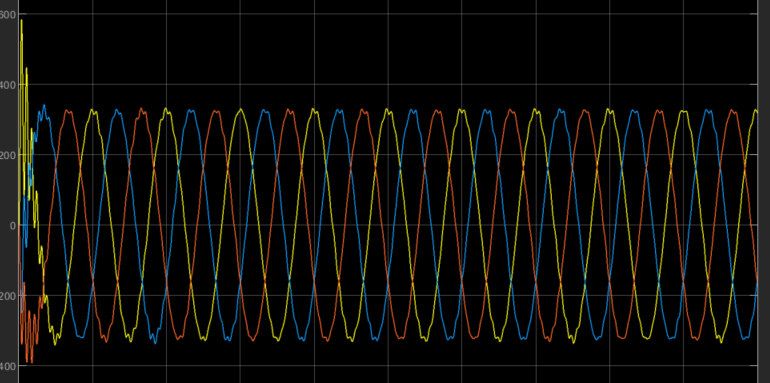
再控制模块基础上加上闭环
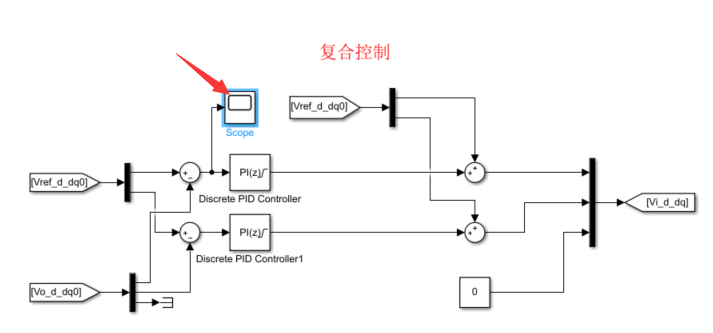
误差:Vref_d_dq0 - Vo_d_dq0
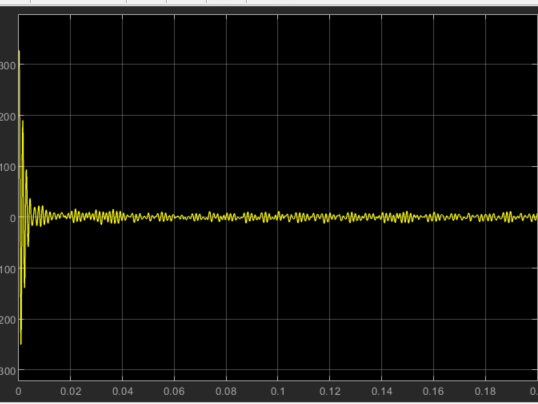
Vo_abc
-
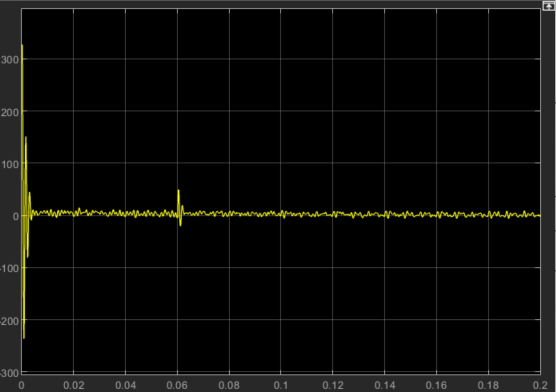
在此基础上再加一个内环的负载电流(要控制什么量,就去找这个量的微分)
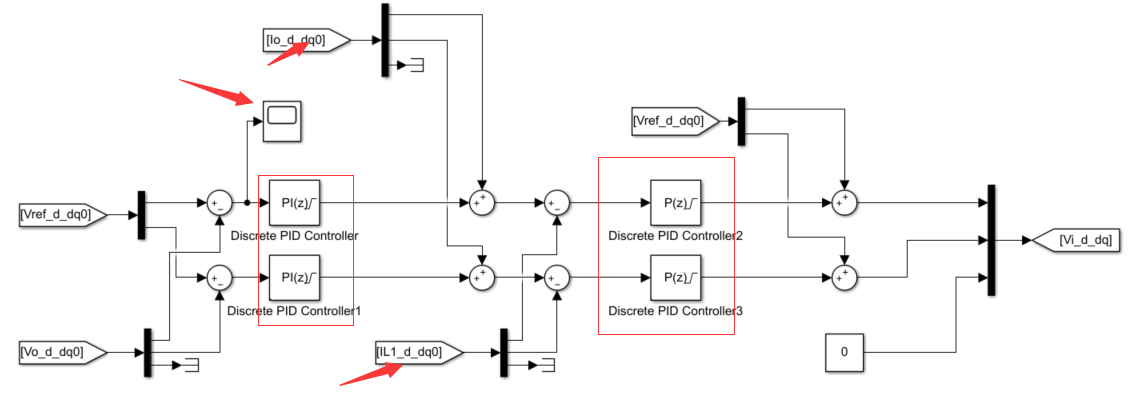
误差:Vref_d_dq0 - Vo_d_dq0

Vo_abc
-
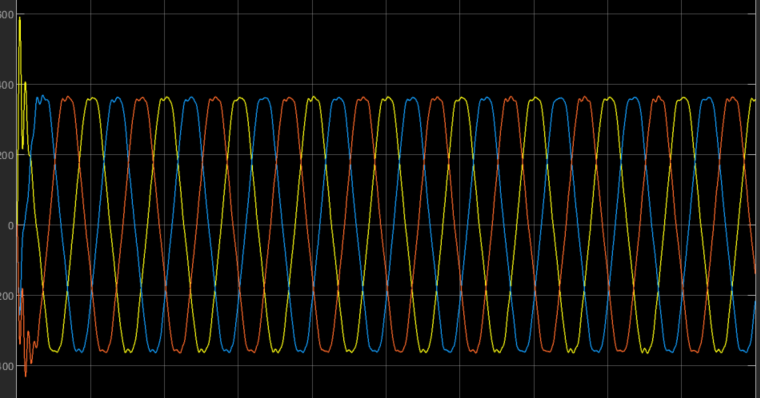
再添加一个三相负载
Vo_abc和Io_abc:
误差:Vref_d_dq0 - Vo_d_dq0
并网逆变的仿真被老师鸽了(待续)