1:概念
当数据有序,二叉搜索树将趋近于单叉树,查找元素相当于在顺序表中查找元素,效率低下,两位俄罗斯数学家G.M.Adelson-Velskii和E.M.Landis创建了AVL树。特性如下:
左右子树高度差的绝对值不超过1
左右子树都为AVL树
如果一棵树是高度平衡的,搜索效率就可以保持在log2的N
2:模拟实现
2.1:结构体定义
因为map/multimap/set/multiset底层是平衡搜索树,所以可以采用键值对插入的方式。
template<class K,class V>
struct AVLTreeNode
{
pair<K, V> _kv;
AVLTreeNode<K, V>* left;
AVLTreeNode<K, V>* right;
AVLTreeNode<K, V>* parent;
int _bf;
AVLTreeNode(const pair<K,V>& kv)
:left(nullptr)
,right(nullptr)
,parent(nullptr)
,_kv(kv)
,_bf(0)
{}
};_bf是平衡因子,表示左右子树高度差。
2.2:平衡因子
平衡因子表示左右高度差,通常用右子树高度-左子树高度。
2.3:插入
插入就和二叉搜索树一样,用kv的键值对的K(first)比较,但是AVL树的插入分为2个步骤,插入节点和调整平衡因子。
bool Insert(const pair<K, V>& kv)
{
if (_root == nullptr)
{
_root = new Node(kv);
}
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (cur->_kv.first > kv.first)
{
parent = cur;
cur = cur->left;
}
else if (cur->_kv.first < kv.first)
{
parent = cur;
cur = cur->right;
}
else
{
return false;
}
}
cur = new Node(kv);
if (parent->_kv.first > kv.first)
{
parent->left = cur;
cur->parent = parent;
}
else
{
parent->right = cur;
cur->parent = parent;
}先找到合适的位置,再判断自己是左节点还是右节点,将这个new的新节点和父亲链接起来。
2.3:调整平衡因子
因为是插入孩子节点,所以要调整父亲的平衡因子,因此当父亲为空的时候停止调整。
while(parent)
if (cur = parent->left)
{
parent->_bf--;
}
else
{
parent->_bf++;
}cur是左,平衡因子--,因为左高右低,同理反之。
因为AVL树要保持高度平衡,所以接下来要对父亲的平衡因子情况做判断。
if (parent->_bf == 0)
{
//没有高度变化
break;
}
else if (parent->_bf == 1 || parent->_bf == -1)
{
cur = parent;
parent = parent->parent;
}
else if (parent->_bf == 2 || parent->_bf == -2)
{
//旋转
if (parent->_bf == 2 && cur->_bf == 1)
{
//右子树高度发生了变化
RotateR(parent);
break;
}
}如果父亲平衡因子变成0,说明原本是1或者-1,也就是从不平衡到平衡,这次插入是填充矮的一边,高度是不会发生变化的,不需要进行旋转。
如果父亲平衡因子变成了1的绝对值,说明从0到1和-1,(不可能从2变成1,从-2变成-1是因为插入的每一次要保证是AVL树,如果插入前已经不平衡,那么后续怎么旋转都没用),那么此时子树高度就发生了变化,变得更高了,但是如果是1的绝对值,还能满足AVL树的特性。
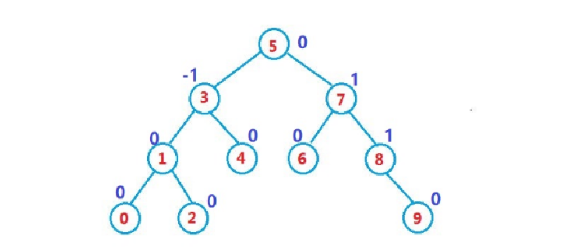
但是如图,9后再插入值,9的平衡因子变成了1,8的平衡因子变成了2,不能满足AVL树的特性了,所以当父亲的平衡因子变成1的绝对值的时候,表明parent所在子树的高度变化了,要持续向上更新。
当父亲的平衡因子变为2的绝对值,并且cur的平衡因子是1的时候,说明当前是在cur的右节点上插入了节点,导致高度严重不平衡。
2.3.1:左单旋
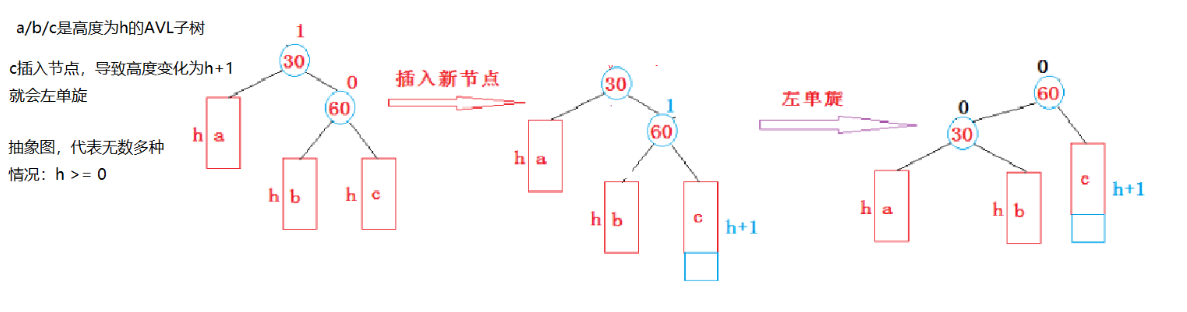
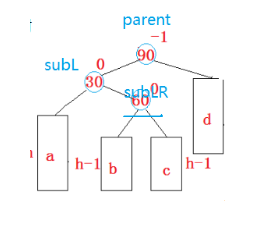
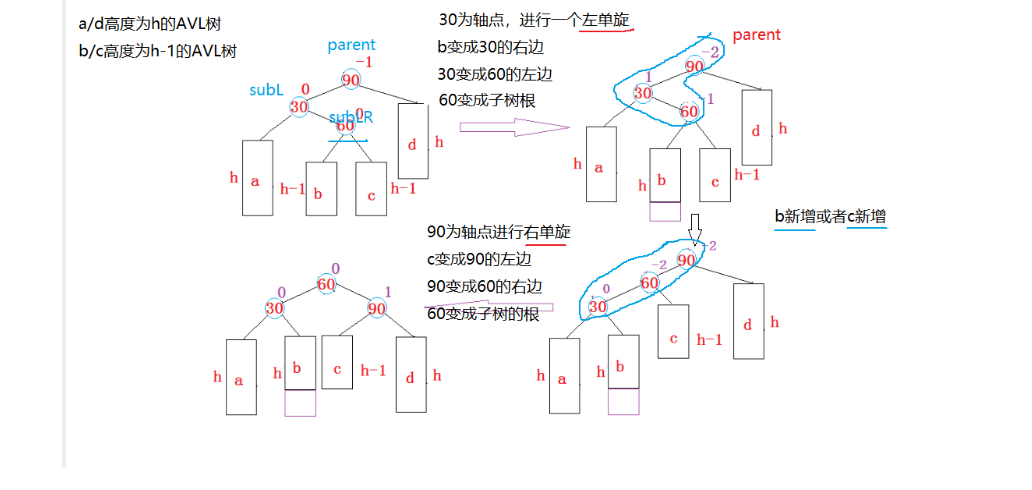
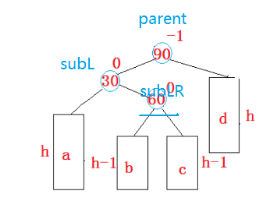
假设abc是高度为h的avl子树,因为之前说了cur的bf为1,说明是从c这里插入节点,c的高度变为h+1,此时就会发生左单旋,左单旋又分为多种情况。
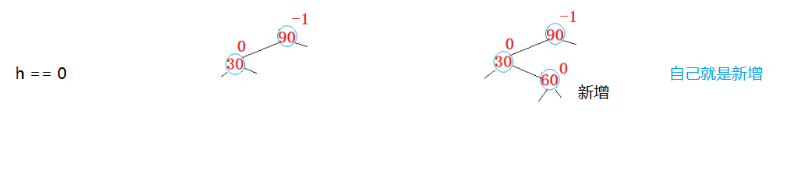
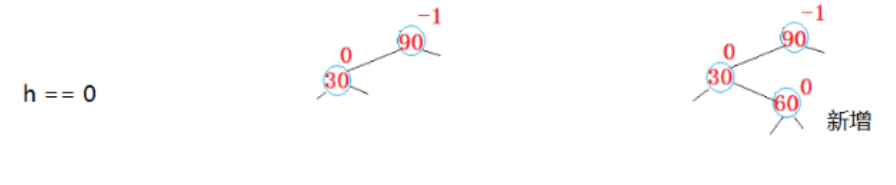
2.3.1.1:h=0

abc此时为空节点,将30链接到60的左孩子。
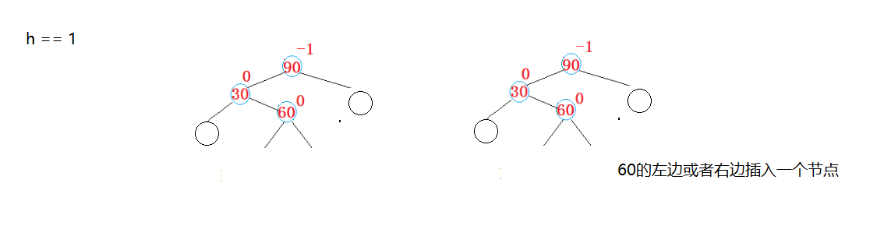
2.3.1.2:h=1

把b作为30的右孩子,30作为60的左孩子。因为b必然大于30小于60。30和a必然小于60。
c的左右新增都会引发旋转。
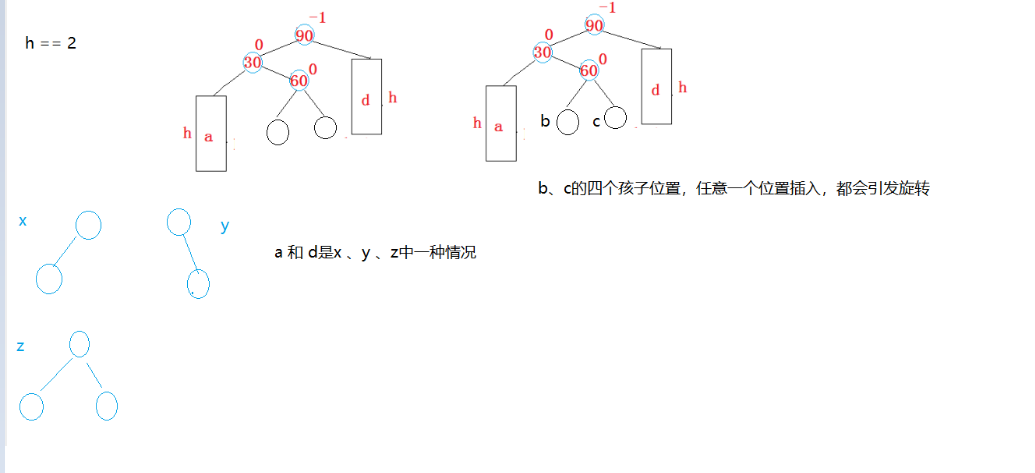
2.3.1.3:h=2
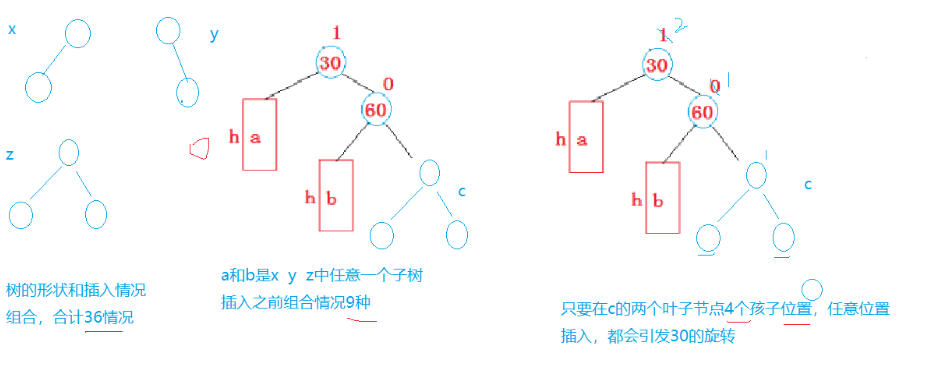
abc高度为2,那么a和b必然各自有3种情况,对于c肯定是z的形状,因为c插入了新节点导致c的高度变为了h+1,才会导致树不平衡,如果c是x或者y,插入了新节点后高度不会变,不会引发旋转。而且c如果是x或者y的情形,就等同于第一种情况h=0,因为我们这里所说的不同的h情况不只是针对整棵树,也有可能是部分的子树旋转。所以这里c如果是x或者y就和第一种情况一样。
所以c是z的形状,当c的2叶子节点的4个孩子节点任意位置插入1个节点,c的高度变为h+1,60的平衡因子变成1,30的平衡因子变成2,必然引发30的旋转。
2.3.1:左单旋实现
旋转的目的:
让左右子树高度差不超过1
旋转过程保证他是搜索树
更新调整孩子节点的平衡因子
保证子树的高度和插入前一致
void RotateR(Node* parent)
{
Node* subR = parent->right;
Node* subRL = subR->left;
parent->right = subRL;
if (subRL)
{
//不为空节点
subRL->parent = parent;
}
Node* ppNode = parent->parent;
subR->left = parent;
parent->parent = subR;
if (ppNode == nullptr)
{
//更新root
_root = subR;
_root->parent = nullptr;
}
//parent不是根节点,说明还要把父亲和subr链接
else
{
if (ppNode->left == parent)
{
ppNode->left = subR;
}
else
{
ppNode->right = subR;
}
subR->parent = ppNode;
}
parent->_bf = subR->_bf = 0;
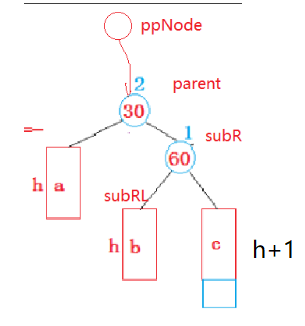
}因为结束条件是parent为空就停止调整,所以每次传parent给单旋函数。
实际上调整的是parent右节点/右节点的左节点/parent/parent的parent这4个节点的关系。
思路就是
定义2个指针指向parent的右和右的左
parent的右指向subRL
当subRL不为空的时候,subRL的parent指向parent
subR的左指向parent
定义指针指向parent的parent,因为不确定parent是否为根节点,如果不为根节点,因为parent的parent需要更改为subR,但是parent不是根节点,他还有parent,还应该把更改前的parent的parent与subR进行链接,否则找不到parent的parent。
parent的parent指向subR
如果parent的parent是空,说明parent本来是根节点,此时就让根节点变成subR,并且让subR也就是root根节点的父亲变为空指针。不置空那么subR的父亲还仍然指向parent。
如果parent的parent不为空,说明parent不是根节点,此时判断parent是左还是右,然后对应着把parent的parent的左/右链接到subR,
把subR的父亲链接到ppnode
调整parent和subR的平衡因子(目的之一)
为什么旋转一次就可以break了?因为到了当前子树部分(也有可能到了根,不影响),因为当前子树部分的高度变化了,导致上面的高度也会变化,所以旋转当前部分的子树,子树的高度又变为插入之前一样的高度了,上面的高度又会恢复,所以旋转一次break就行。
2.3.2:右单旋

与单左旋差不多
void RotateL(Node* parent)
{
Node* subL = parent->left;
Node* subLR = subL->right;
parent->left = subLR;
if (subLR)
{
subLR->parent = parent;
}
Node* ppnode = parent->parent;
parent->parent = subL;
subL->right = parent;
if (ppnode == nullptr)
{
_root = subL;
_root->parent = nullptr;
}
else
{
if (ppnode->left = parent)
{
ppnode->left = subL;
}
else
{
ppnode->right = subL;
}
subL->parent = ppnode;
}
parent->_bf = subL->_bf = 0;
}2.3.3:双旋转
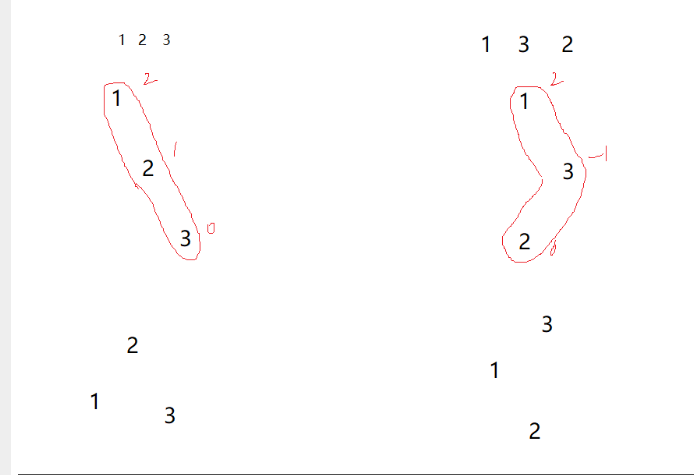
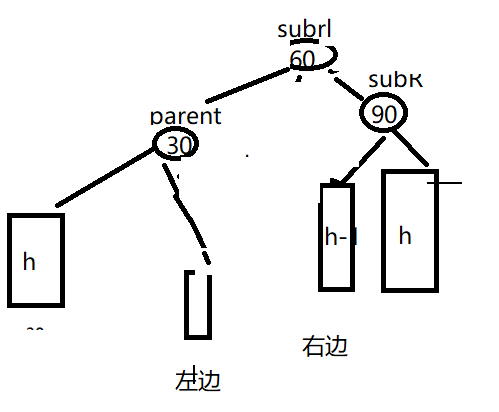
我们前面2种情况的插入是直着插入,如果是右边这种旋转的插入,就算是用前面的办法,把2的左边给1的右边,1作为3的左边,旋转后这样仍然是旋转的样子,不能让子树保持跟插入前的高度一致(就算不能让父亲重新回到0这个平衡因子)。
因此给出了方法,二次旋转。
针对这个又可以画图来分析一下什么情况会导致需要旋转
2.3.3.1:h=0
(此时bc的父亲节点相当于不存在)
2.3.3.2:h=1
2.3.3.3:h=2
b和c必须为z才能导致插入后会发生旋转。
2.3.3.4:双旋过程
双旋情况:
parent和cur分别为-2,1或者2,-1
步骤:
先以30为父亲节点,此时90相当于ppnode,会用来进行链接60
然后以90为父亲节点,再进行右旋。
但是用代码复用的话,平衡因子更新有问题,左旋的话30和60的因子会变成0,右旋的话60和90的因子会变成0。
如果不从单旋分下来看这个问题,本质上这个问题就是把60的b拆分给30的右,60的c拆分给90的左,这样的话90的bf是1,30的bf才是0,更何况如果父亲的bf是-2&&cur的bf是1的时候,b和c哪个插入都不知道,这样一来b和c的平衡因子都不确定,明显平衡因子有错误。
同样的,在h=0的时候,60就是新增,先进行左旋的话(以60为轴点),就是60的左边给30的右边,30变成60的左边,再以90为轴点右旋,就是60的右边变成90的左边,90变成60的右边。
2.3.3.5:双旋的平衡因子调整和双旋LR代码
因此可以根据60的平衡因子来判断是b插入还是c插入还是60就是新增,针对3个情况写出如下的代码。
void RotateRL (Node* parent)
{
Node* subL = parent->left;
Node* subLR = subL->right;
int bf = subLR->_bf;
RotateL(parent->right);
RotateL(parent);
if (bf == -1)
{
//sublr左边新增
subL->_bf = 0;
parent->_bf = 1;
subLR->_bf = 0;
}
else if (bf == 1)
{
//sublr右边新增
parent->_bf = 0;
subL->_bf = -1;
subLR->_bf = 0;
}
else if(bf == 0)
{
//sublr就是新增
parent->_bf = 0;
subL->_bf = 0;
subLR->_bf = 0;
}
else
{
assert(false);
}
}2.3.3.6:RF双旋代码
void RotateRL(Node* parent)
{
Node* subR = parent->right;
Node* subRL = subL->left;
int bf = subRL->_bf;
RotateR(parent->right);
RotateL(parent);
if (bf == -1)
{
//subrl左边新增
subR->_bf = 1;
parent->_bf = 0;
subRL->_bf = 0;
}
else if (bf == 1)
{
//subrl右边新增
parent->_bf = -1;
subR->_bf = 0;
subRL->_bf = 0;
}
else if (bf == 0)
{
//subrl就是新增
parent->_bf = 0;
subR->_bf = 0;
subRL->_bf = 0;
}
else
{
assert(false);
}
}注意pair的头文件包一下<utility>




![[算法]归并排序](https://img-blog.csdnimg.cn/78bc8bdfcbce425b9e129e47ca3fb8dc.png)