滚转角速率控制器:(MC_ROLLRATE_P, MC_ROLLRATE_I, MC_ROLLRATE_D)
滚转角速率控制器:(MC_PITCHRATE_P, MC_PITCHRATE_I,MC_PITCHRATE_D)
滚转角速率控制器:(MC_YAWRATE_P, MC_YAWRATE_I, MC_YAWRATE_D)
滚转角控制 (MC_ROLL_P)
俯仰角控制 (MC_PITCH_P
偏航角控制 (MC_YAW_P)
最大滚转角速率 (MC_ROLLRATE_MAX)
最大俯仰角速率(MC_PITCHRATE_MAX
最大偏航角速率 (MC_YAWRATE_MAX)
滚转角速率前馈控制(MC_ROLLRATE_FF)
俯仰角速率前馈控制(MC_PITCHRATE_FF)
偏航角速率前馈控制(MC_YAWRATE_FF)
调试步骤一般是这样的:
1、轻推油门,在地面上观察飞机有无震荡趋势,没有则正常起飞;
2、在空中做滚转方向激励(遥控器滚转遥杆迅速向左或向右拨杆后回中),遥控器从小到大给出滚转通道激励(10-30度左右的激励)后观察飞机反馈,看飞机有无震荡现象;
3、先调试参数MC_ROLLRATE_P,此参数是角速率控制器的主力军,只要有误差第一时间响应,参数大小直接影响飞机的灵敏度,每次增加10-20%直到给激励后飞机出现小幅震荡为止,这时候将此参数缩减为60-70%左右;
4、再调试参数MC_ROLLRATE_I,也是每次增加10-20%直到飞机出现小幅震荡,缩减为60-70%,此参数主要用于消除跟踪静差,参数太小会导致无法应对外界扰动;
5、参数MC_ROLLRATE_D与飞行器的噪声有关,所以对于噪声大的飞行器此参数基本设置为0附近,噪声小的可以适当增加此参数后观察飞机是否有小幅震荡,有的话缩减为50%,此参数过小会出现飞行器给出激励后回中时超调出现多次余震。
6、固定好内环参数后调试参数MC_ROLL_P,此参数基本不用怎么调试,调大了也会震荡,然后缩小;
7、MC_ROLLRATE_FF参数其实就是角速环输出直接反馈到电机上,此参数有利于飞行器给出姿态期望后的快速响应,但是不能过大,因为他不是反馈控制,要是占的输出比例过大,会干扰角速率环的控制。如果飞行器姿态响应比较慢可适当加大,姿态响应过于灵敏则降低此参数。
8、关于角度和角速率的限幅参数其实要根据具体的飞机来定了,如果飞机的电机不够富裕,那就限制得小一点,如果电机能力足够,就放宽一些。
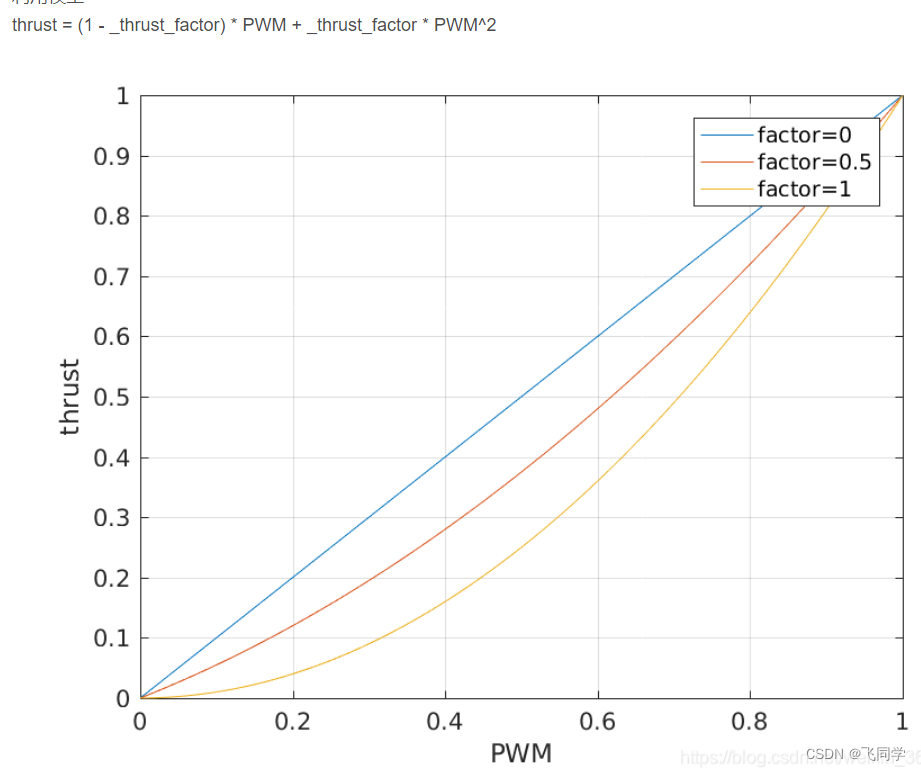
9、THR_MDL_FAC参数,这个参数是用来修正升力和PWM输出值的关系的,我们经常发现在悬停状态时飞机的姿态控制好好的,但是到了快速爬升和下降时,飞机就出现姿态不稳的现象,就是因为力和PWM的输出他不是线性关系,所以会出现不同油门值的时候控制效果不一样,这个参数就是用来调试这个现象的。
对于PID 的理解
P增益(比例增益) 用来减小误差。 它可以加快响应速度,因此应该在不引入震荡的前提下设的尽量的高。
如果P增益太高了,会有高频率的振荡。
如果 P 增益太低了:
飞行器会对遥控器的输入很迟钝。
D增益(微分增益) 用来增加阻尼,可以防止超调。 同样地,这个值应该尽量设大一些来避免超调。
D增益太大,电机可能会抽搐、发热(也有可能不会) 。这是因为D项同时也会放大震动等带来的噪声。
D增益太低飞行器给出激励后回中时超调出现多次余震。
I(积分)增益可以「记住误差」。 如果你发现过了一段时间了,角速度还是达不到设定值,那就该增加 I 了。 它很重要(尤其在特技模式下) ,但我们不应该把它设得太高。
如果积分增益太高:你会看到缓慢的振荡。
他应该始终保持相同的角度。 如果它往回漂移,增加 I 。 通过观察日志我们也可以发现 I 增益太小的问题,可以看到实际的角速度过很久也达不到期望的角速度。
角度控制
角度控制环控制机体的姿态角,并通过设定的角度和实际角度误差来设定期望角速度,反过来想可能会比较直观,即用角速度来补偿角度。该控制环有以下参数可以调:
滚转角控制 (MC_ROLL_P)
俯仰角控制 (MC_PITCH_P
偏航角控制(MC_YAW_P)
姿态角控制环调起来就容易多了。 其实大多数时候默认值就够了,完全不用调。
角度控制环可以在手动/自稳模式下调,逐渐增大P增益。 如果看到有振荡或者超调,就说明调得太高了。
参数THR_MDL_FAC
一般建立多旋翼数学模型时,PWM和螺旋桨升力就是平方关系