文章目录
- 1. 官方demo包
- 2. 控制底层+地图采集
- 3. 感知定位
- 4. 规划控制
- 5. 仿真或实车运行
1. 官方demo包
wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_data.tar.gz
wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_150324.tar.gz
官方示例包的网上讲的很多了,这里不再赘述。
通过运行官方示例大家主要了解软件的运行流程就好,熟悉之后可以进行二次开发。
2. 控制底层+地图采集
用实验车运行Autoware,首先要调通控制底层,底层一般是CAN通讯,有pci接口的can或者usb-can,调试相关驱动使得程序能够控制车辆的油门、制动和转向,有这些最基础的功能后就够了。
地图采集有gps轨迹图或者激光点云图,激光建图的话可以遥控或者驾驶车辆绕所在区域开一圈,让激光雷达稳定地扫描周围环境即可,采集完成后,在软件中用ndt_mapping模块来建图。
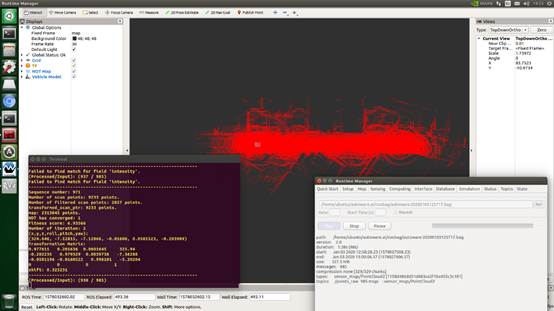
3. 感知定位
接入激光雷达后,点云图能正常显示,且与上一步建好的点云地图能匹配上,这里主要用到了ndt_matching模块。

如果还用到相机、GPS等其他感知定位设备,调通相关驱动即可,另外,还可以加入检测、分割等感知类算法。
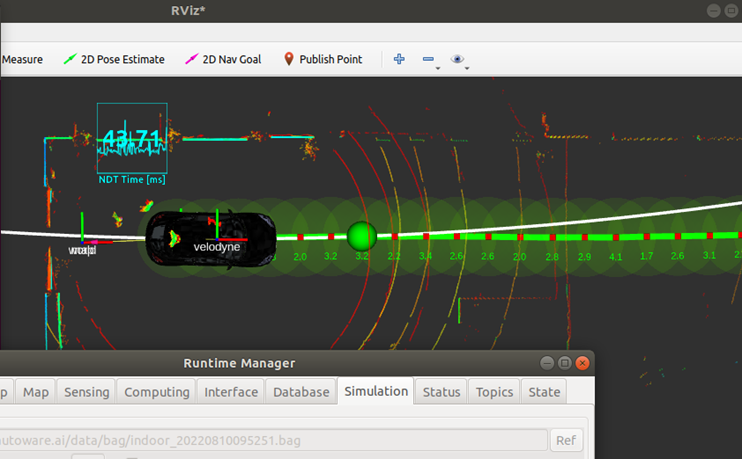
4. 规划控制
最简单的话可以直接用Autoware的Waypoint_planner、A*规划模块和PurePursuit控制模块,将之前录包的轨迹保存,然后加载这条轨迹,即可实现路径跟踪功能。
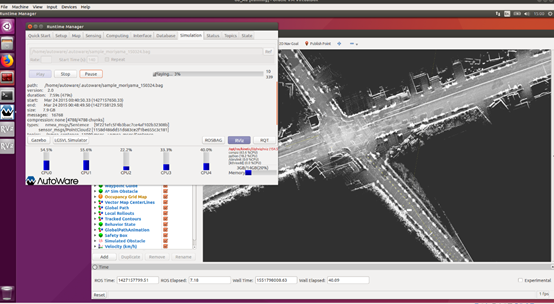
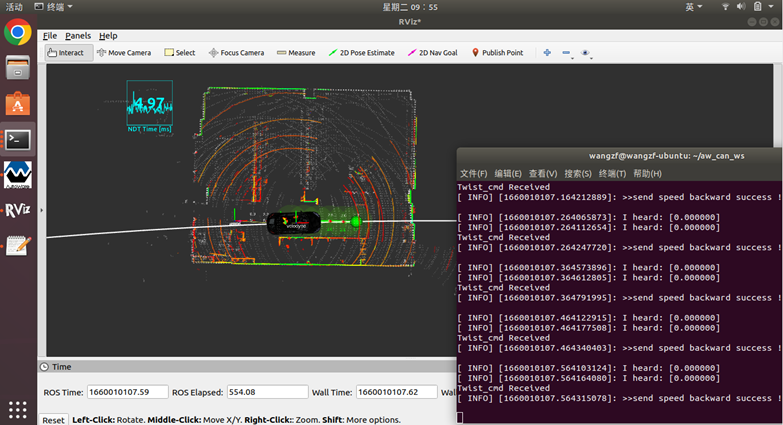
5. 仿真或实车运行
ROS工具提供了rosbag工具,可以很方便地回放数据包,因此,在这些数据包播放时,启动相关节点调试即实现了仿真。仿真的优势就是可以在不依赖硬件的情况下,随时调试自己相关的软件模块。
当然也可以搭配其他仿真软件来使用,如LGSVL和Carla,这是两个常用的仿真软件,与ROS的适配也好一点。

最终软件还是要部署到实车上,前面的条件都具备后,将软件部署到车上,你会发现很多在仿真阶段没有的问题,这时候就是一个不断调试的过程了,这个过程也会进一步考验软件的鲁棒性。
最后,除了算法的二次开发外,还可在此基础上基于socket通信做车联网模块、车机模块、座舱模块等等。
以上。