目录
优化需求
优化方法
从模型配置优化
优化结果对比
从算法层优化
优化结果对比
总结
优化需求
本次优化的目的是提升FOC代码执行速度,以普通滑模观测器为例,优化前把速度环控制放到2ms的周期单独运行,把VOFA+上位机通信代码放到主循环而不是中断里,然后通过优化对比ADC中断里代码执行的速度。目标是尽量缩短ADC中断负载。
优化方法
从模型配置优化

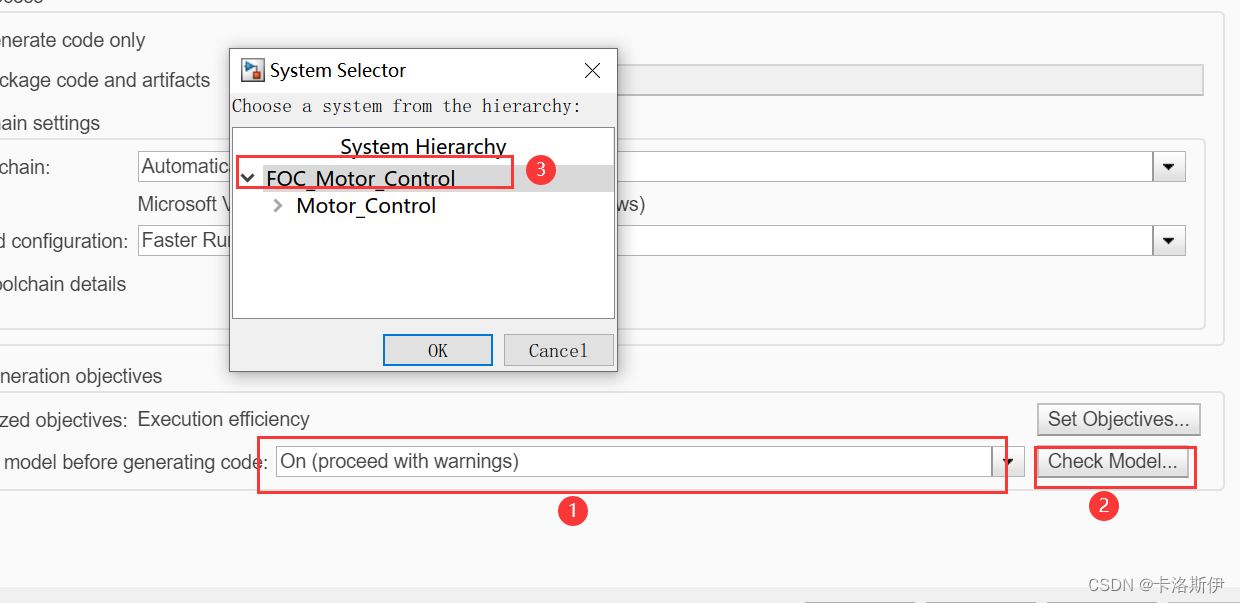
带感叹号的就是会影响效率的,如下有6项可能会影响运行效率,按照提示进行优化即可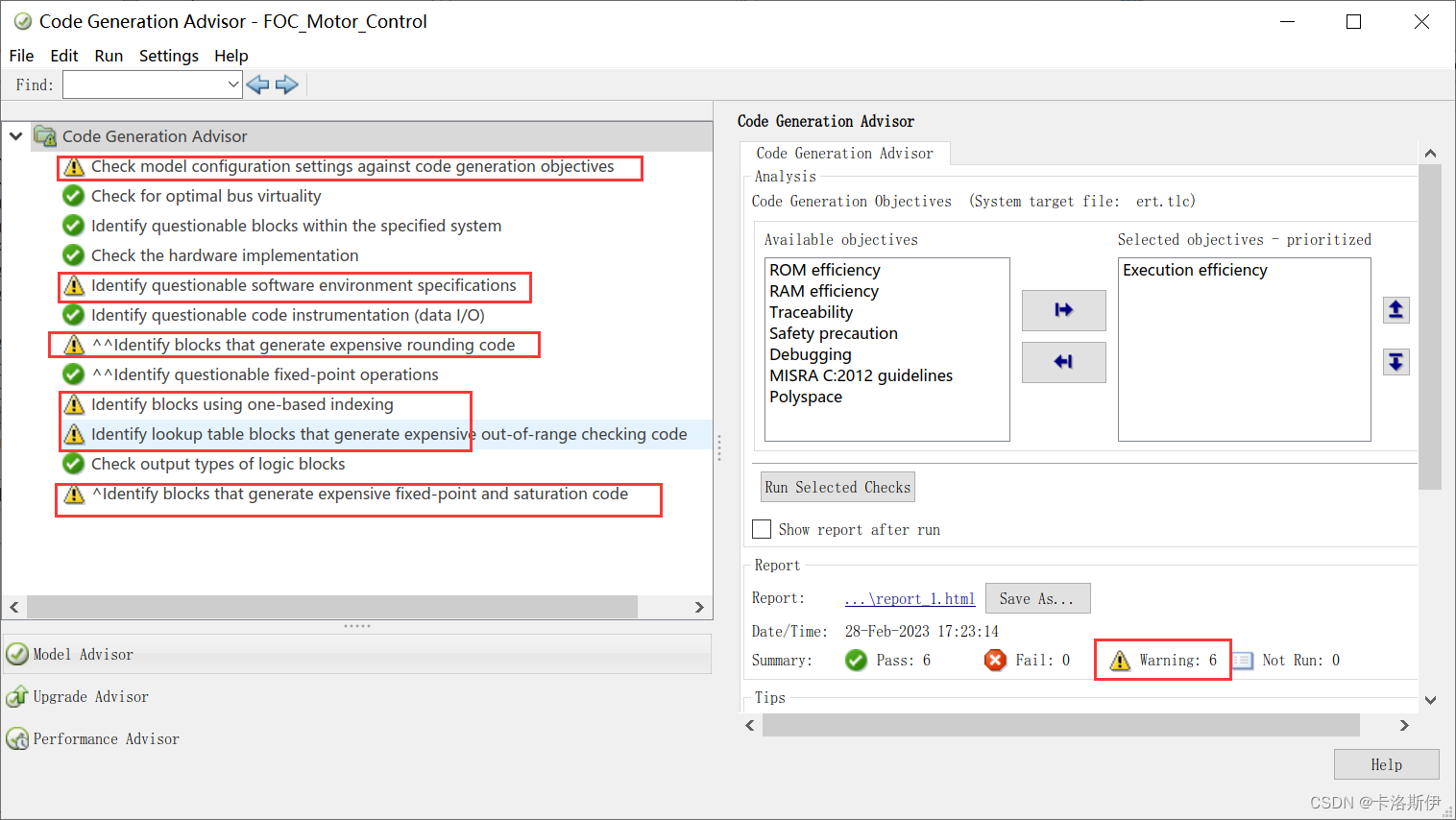
调整完后,显示都通过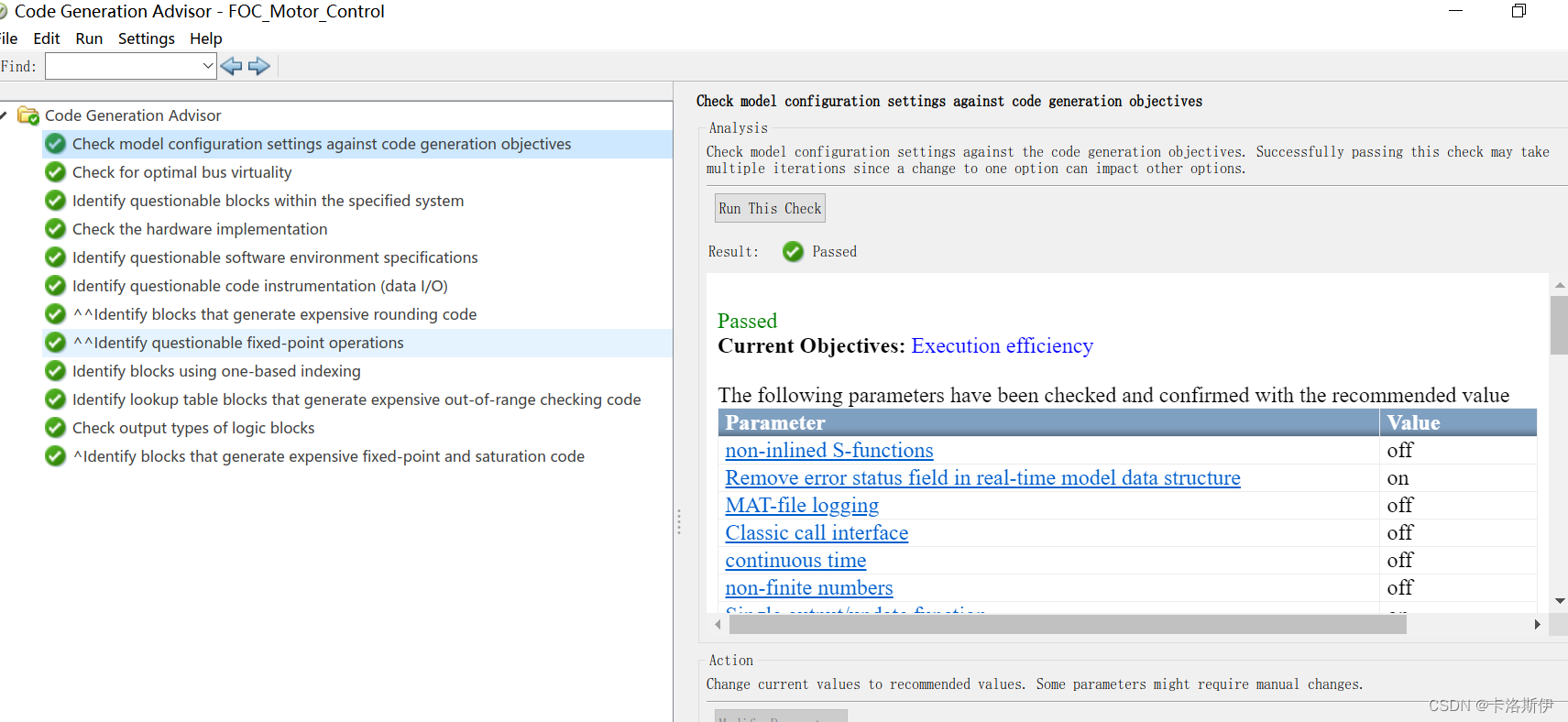
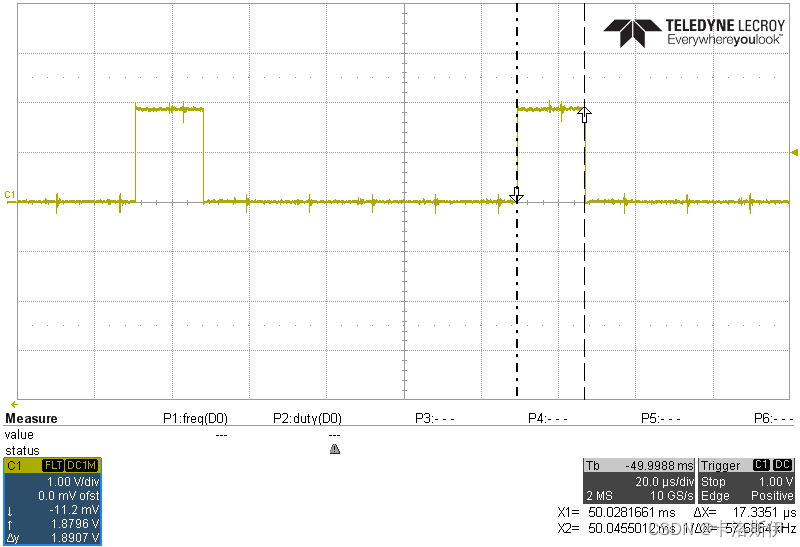
优化结果对比
以普通滑模代码生成为例,模型优化配置前FOC+SMO 速度闭环控制17.33us:
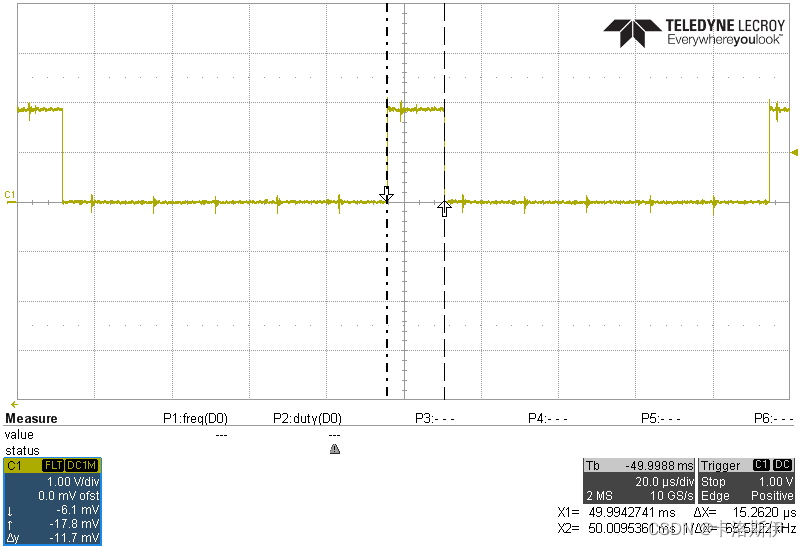
优化后:15.2us
从算法层优化
1. 尽量不要用Simulink自带的模块,如PI等,尽可能自己搭
2. 除法尽量转换成乘法,如除以可以改写成乘(1/
)
3. Clark变换采用等幅值变换可以减少一定计算量
4. SVPWM 采用谐波注入的方式,不需要判断扇区和矢量
....
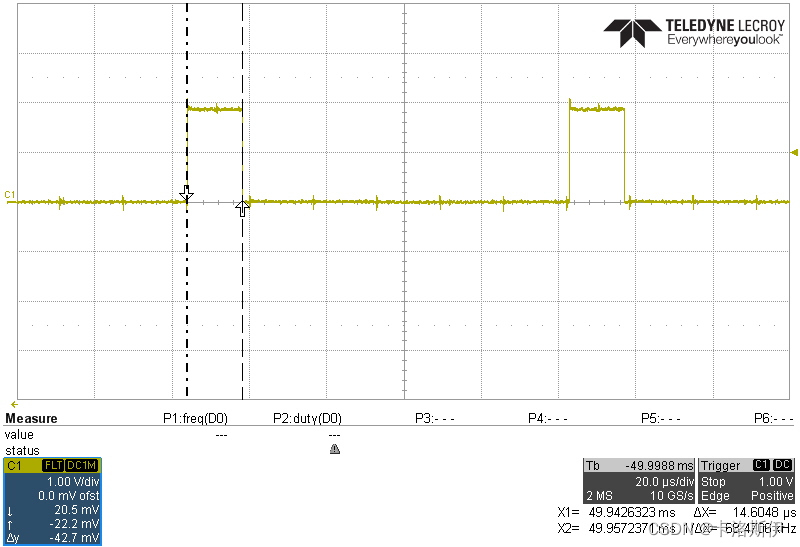
一顿操作后
优化结果对比
时间又减少了一些
编译器配置优化选项
编译器选择Version 6
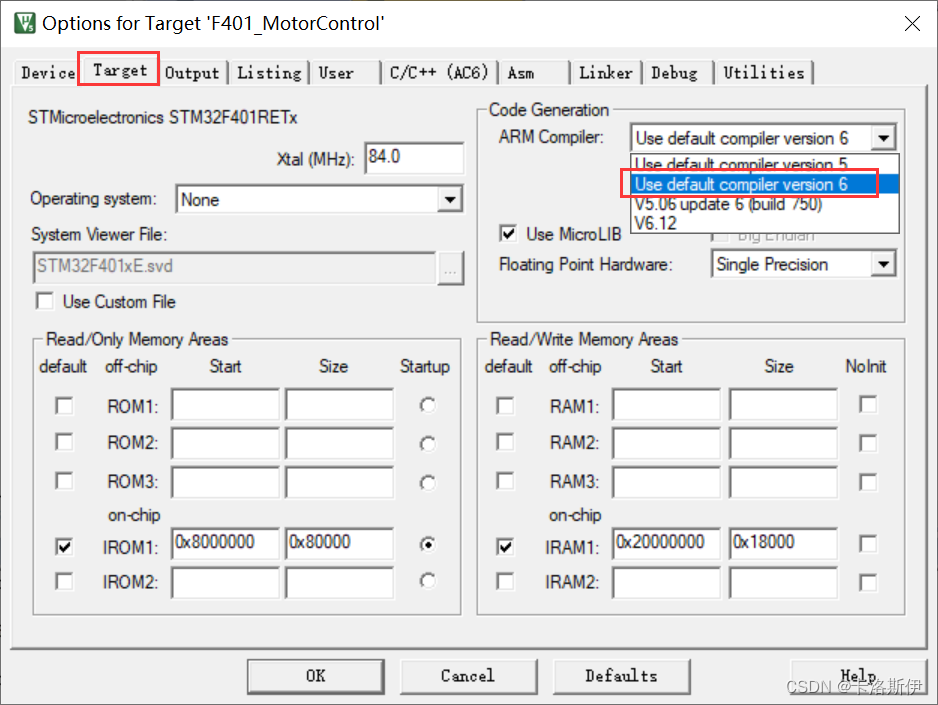
优化等级选择O2, 并勾选 Link-Time Optimizatior

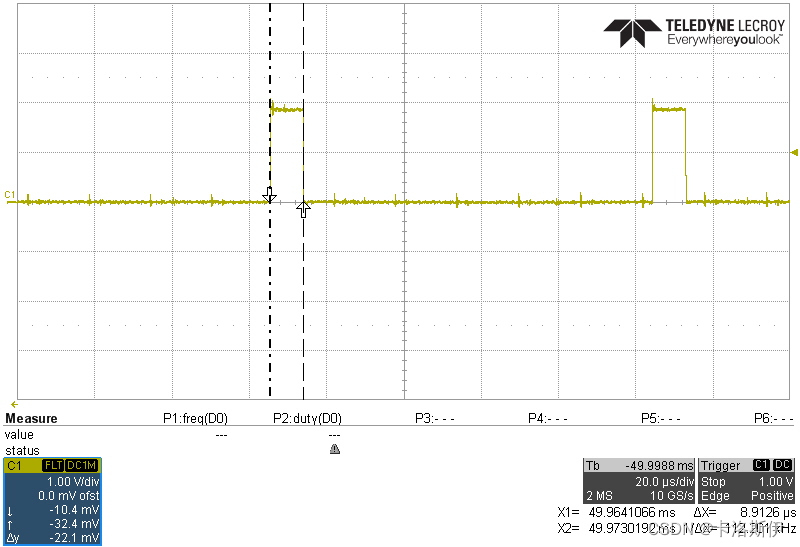
优化结果对比
最后,FOC+SMO 闭环控制8.9us
总结
优化前代码执行速度17us, 优化后8.9us, 效率提升了将近一倍,从优化过程可以看出,要提高代码运行效率需要从三个方面入手:
1.模型的搭建和配置
2.模型算法的优化
3. 编译器的优化也至关重要
编译器的优化有时候会影响到程序的正常执行,测试过程中都是保证电机能正常工作,具体以实际工程需要进行优化,这里仅供参考




![[数据结构]:08-顺序查找(顺序表指针实现形式)(C语言实现)](https://img-blog.csdnimg.cn/68e1ad5cc94b4e158b631b2aa4e03582.png)


![[创业之路-57] :商业计划书BP如何书写?总体框架!](https://img-blog.csdnimg.cn/img_convert/2e5dbbd9f585694038db816484e78a0f.webp?x-oss-process=image/format,png)