目录
一、最小二乘法 (Least Squares, LS)
二、采样一致性(Sample Consensus)方法
2.1 pcl::LeastMedianSquares (LMedS)
2.2 pcl::RandomSampleConsensus (RANSAC)
2.3 pcl::MEstimatorSampleConsensus (MSAC)
2.4 pcl::RandomizedRandomSampleConsensus (RRANSAC)
2.5 pcl::RandomizedMEstimatorSampleConsensus (RMSAC)
2.6 pcl::MaximumLikelihoodSampleConsensus (MLESAC)
2.7 pcl::ProgressiveSampleConsensus (PROSAC)
三、结果与对比(XBB)
一、最小二乘法 (Least Squares, LS)
分享给有需要的人,代码质量勿喷
void main()
{
//load
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("F:/test.pcd", *cloud);
//mat
int pCount = cloud->points.size();
Eigen::MatrixXd matPoints(pCount, 3);
for (int i = 0; i < pCount; i++)
{
matPoints(i, 0) = cloud->points.at(i).x;
matPoints(i, 1) = cloud->points.at(i).y;
matPoints(i, 2) = cloud->points.at(i).z;
}
//-质心
Eigen::RowVector3d centroid = matPoints.colwise().mean();
Eigen::MatrixXd A = matPoints;
A.rowwise() -= centroid;
//SVD
Eigen::JacobiSVD<Eigen::MatrixXd> svd(A, Eigen::ComputeThinU | Eigen::ComputeThinV);
Eigen::Matrix3d V = svd.matrixV();
Eigen::MatrixXd U = svd.matrixU();
Eigen::Matrix3d S = U.inverse() * A * V.transpose().inverse();// S = U^-1 * A * VT * -1
//ax+by+cz+d=0
Eigen::RowVector3d normal;
normal << V(0, 2), V(1, 2), V(2, 2);
double nd = -normal * centroid.transpose();
double na = V(0, 2);
double nb = V(1, 2);
double nc = V(2, 2);
if (nc < 0)//同向(0,0,1)
{
na *= (-1);
nb *= (-1);
nc *= (-1);
nd *= (-1);
}
}二、采样一致性(Sample Consensus)方法
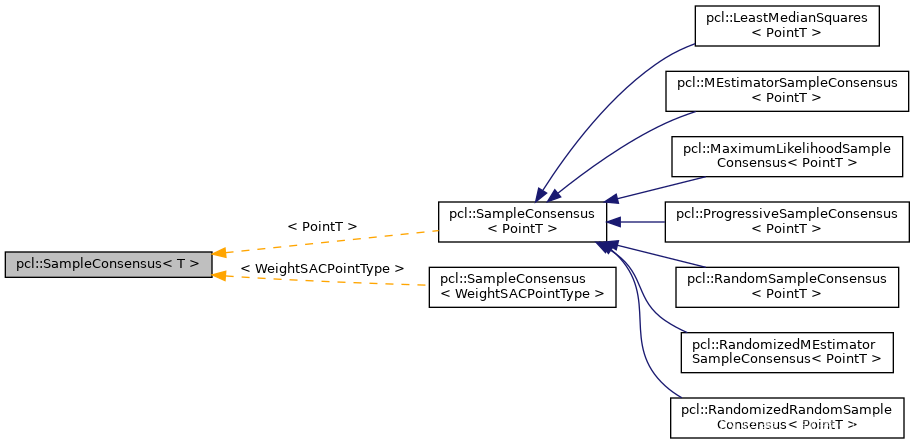
pcl::SampleConsensus![]() https://pointclouds.org/documentation/classpcl_1_1_sample_consensus.html#details
https://pointclouds.org/documentation/classpcl_1_1_sample_consensus.html#details
2.1 pcl::LeastMedianSquares (LMedS)
2.2 pcl::RandomSampleConsensus (RANSAC)
2.3 pcl::MEstimatorSampleConsensus (MSAC)
2.4 pcl::RandomizedRandomSampleConsensus (RRANSAC)
2.5 pcl::RandomizedMEstimatorSampleConsensus (RMSAC)
2.6 pcl::MaximumLikelihoodSampleConsensus (MLESAC)
2.7 pcl::ProgressiveSampleConsensus (PROSAC)
分享给有需要的人,代码质量勿喷
void main()
{
//load
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("F:/test.pcd", *cloud);
//SAC Plane
pcl::SampleConsensusModelPlane<pcl::PointXYZ>::Ptr model_plane(new pcl::SampleConsensusModelPlane<pcl::PointXYZ>(cloud));
//fit method
pcl::LeastMedianSquares<pcl::PointXYZ> fitMethod(model_plane);
//pcl::RandomSampleConsensus<pcl::PointXYZ> fitMethod(model_plane);
//pcl::MEstimatorSampleConsensus<pcl::PointXYZ> fitMethod(model_plane);
//pcl::RandomizedRandomSampleConsensus<pcl::PointXYZ> fitMethod(model_plane);
//pcl::RandomizedMEstimatorSampleConsensus<pcl::PointXYZ> fitMethod(model_plane);
//pcl::MaximumLikelihoodSampleConsensus<pcl::PointXYZ> fitMethod(model_plane);
//pcl::ProgressiveSampleConsensus<pcl::PointXYZ> fitMethod(model_plane);
fitMethod.setDistanceThreshold(0.01);//距离阈值
fitMethod.computeModel();
//面参数 ax+by+cz+d=0
Eigen::VectorXf coefficient;
fitMethod.getModelCoefficients(coefficient);
double na = coefficient[0];
double nb = coefficient[1];
double nc = coefficient[2];
double nd = coefficient[3];
if (nc < 0)
{
na = -na;
nb = -nb;
nc = -nc;
nd = -nd;
}
//内点
std::vector<int> inliers;//存储内点索引的向量
fitMethod.getInliers(inliers);//提取内点对应的索引
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_plane(new pcl::PointCloud<pcl::PointXYZ>);
pcl::copyPointCloud<pcl::PointXYZ>(*cloud, inliers, *cloud_plane);
}三、结果与对比(XBB)
感觉有些结果不大合理,但是不重要,嘻嘻。
| fit method | a | b | c | d |
| Least Squares LS | 0.00938328 | 0.0145269 | 0.99985 | 6.47668 |
| CloudCompare-Plane-Fit LS | 0.00938328 | 0.014527 | 0.99985 | |
| LeastMedianSquares LMedS | 0.0106059 | 0.0129623 | 0.99986 | 6.44786 |
| RandomSampleConsensus RANSAC | 0.0177447 | 0.00836339 | 0.999808 | 6.35407 |
| MEstimatorSampleConsensus MSAC | 0.0177447 | 0.00836339 | 0.999808 | 6.35407 |
| RandomizedRandomSampleConsensus RRANSAC | -0.184171 | 0.266717 | 0.946014 | 10.666 |
| RandomizedMEstimatorSampleConsensus RMSAC | -0.184171 | 0.266717 | 0.946014 | 10.666 |
| MaximumLikelihoodSampleConsensus MLESAC | 0.0117652 | 0.0209168 | 0.999712 | 6.55405 |
| ProgressiveSampleConsensus PROSAC | 0.0117652 | 0.0209168 | 0.999712 | 6.55405 |