前段时间尝试了一款激光雷达和相机标定的代码,总结了博客:
【学习总结】激光雷达与相机外参标定:原理与代码
但总觉得那个代码太差劲,而且精度不行,于是又找了些新的代码,体验比之前的好很多,在此做记录。而且精度目测比之前的代码高不少,主要是因为会自动筛选最合适的位姿组合。
代码:https://github.com/acfr/cam_lidar_calibration
论文:Optimising the selection of samples for robust lidar camera calibration
youtube视频:https://youtu.be/WmzEnjmffQU
这个代码的参数配置比之前那个清晰很多,只有一个yaml文件,而且提供的可视化工具也很完善,调试起来解决一些小的接口问题就能够直接运行,好评。
代码使用方法
- 运行雷达、相机节点,发布雷达数据,图片数据以及camera info数据;
- 运行主要程序节点,通过rqt_config工具,截取xyz坐标轴,使rviz中的点云尽量只保留棋盘格区域;
- 点击capture进行一次截取;
- 更换棋盘格位置或重新载入下一个rosbag,再点击capture;
- 重复3-4,包括至少3个位姿,可以更多;如果某次截取效果不好,可以discard当次截取;
- 数量足够后,点击optimize按钮,后台开始优化;
- 优化结果输出到命令行与指定路径,并可进行可视化显示误差与结果。
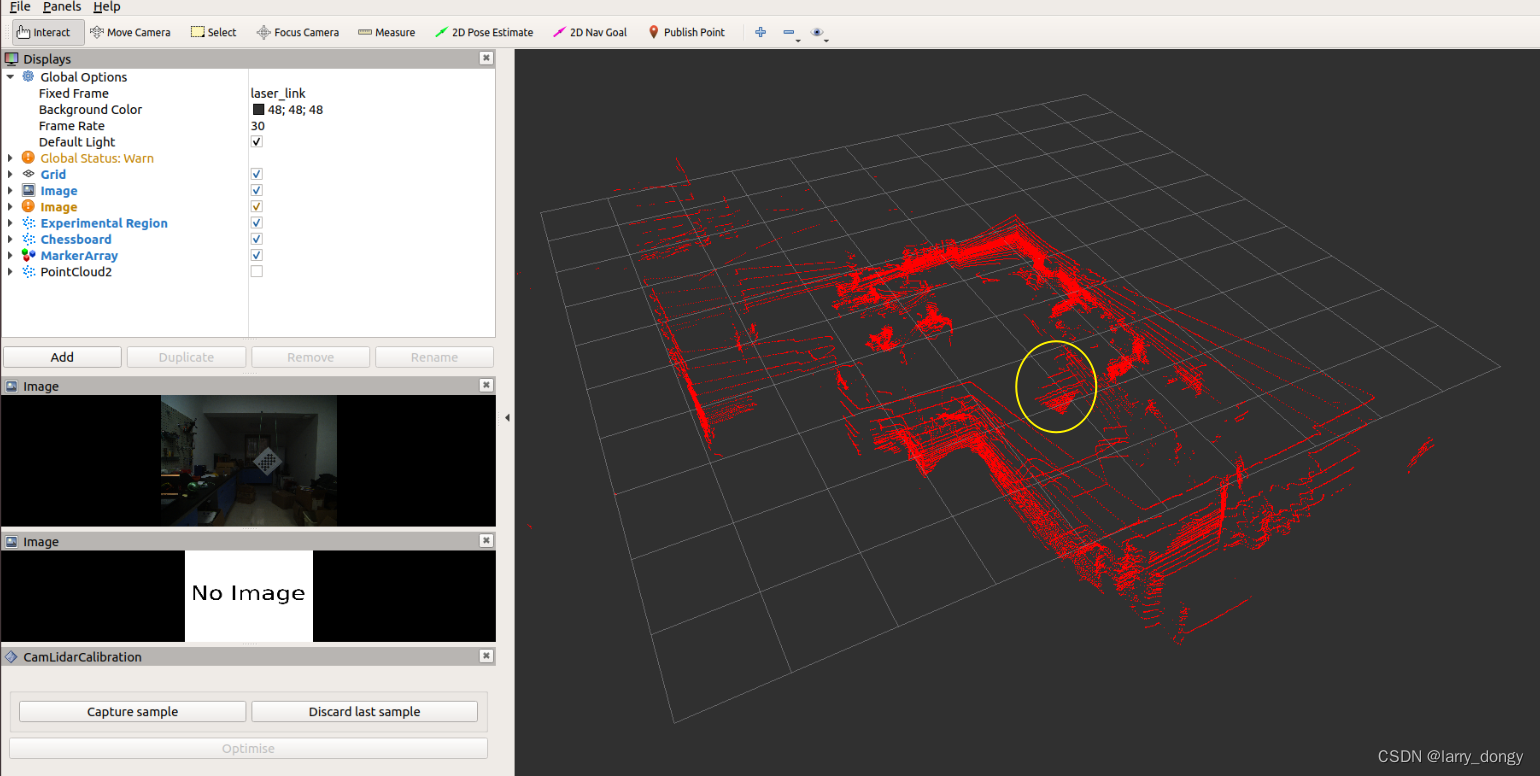 开始截取前的界面,黄色圆圈部分是棋盘格的点云;
开始截取前的界面,黄色圆圈部分是棋盘格的点云;
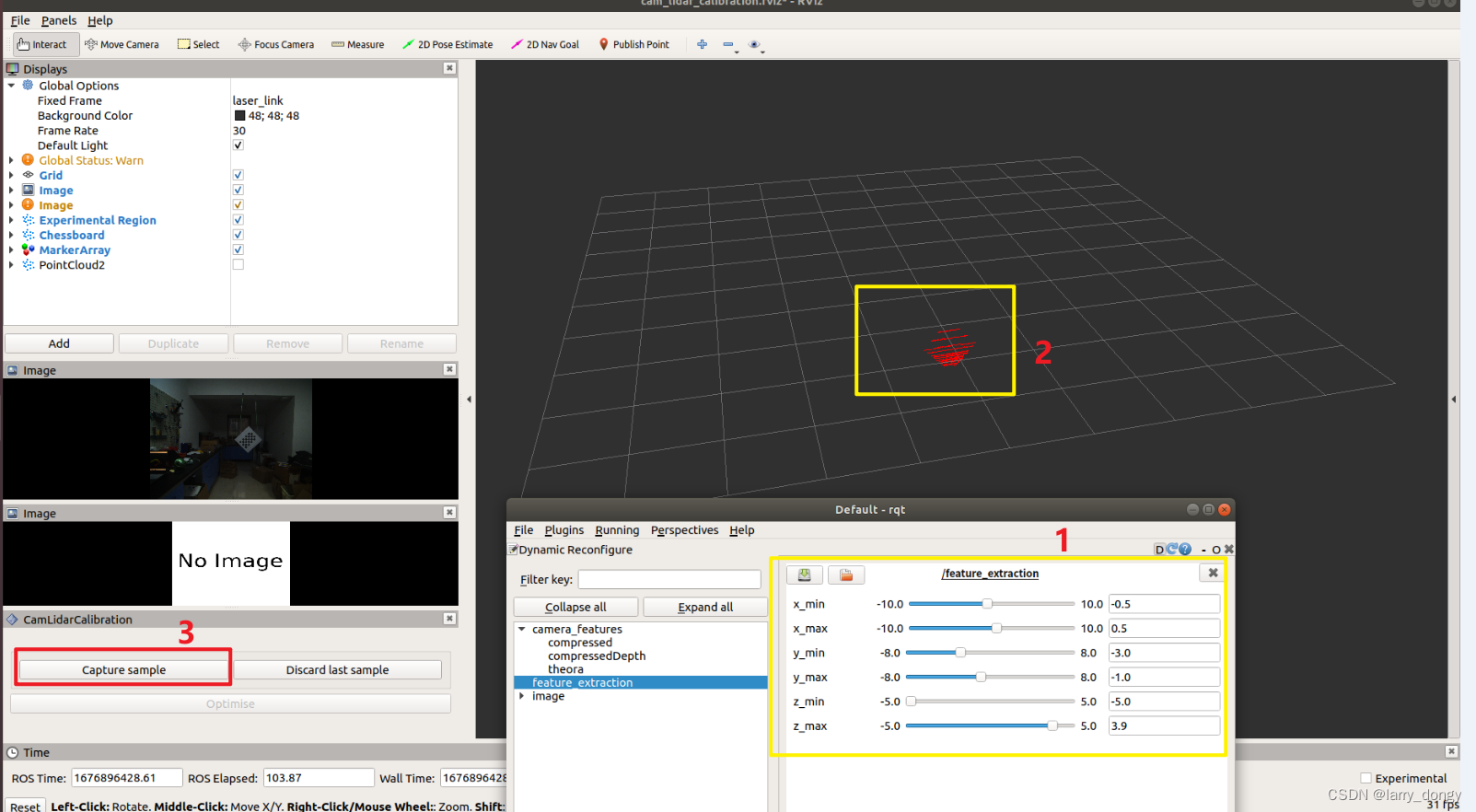 修改1中的区间,使仅保留棋盘格点云如2所示,再点击3处的capture
修改1中的区间,使仅保留棋盘格点云如2所示,再点击3处的capture
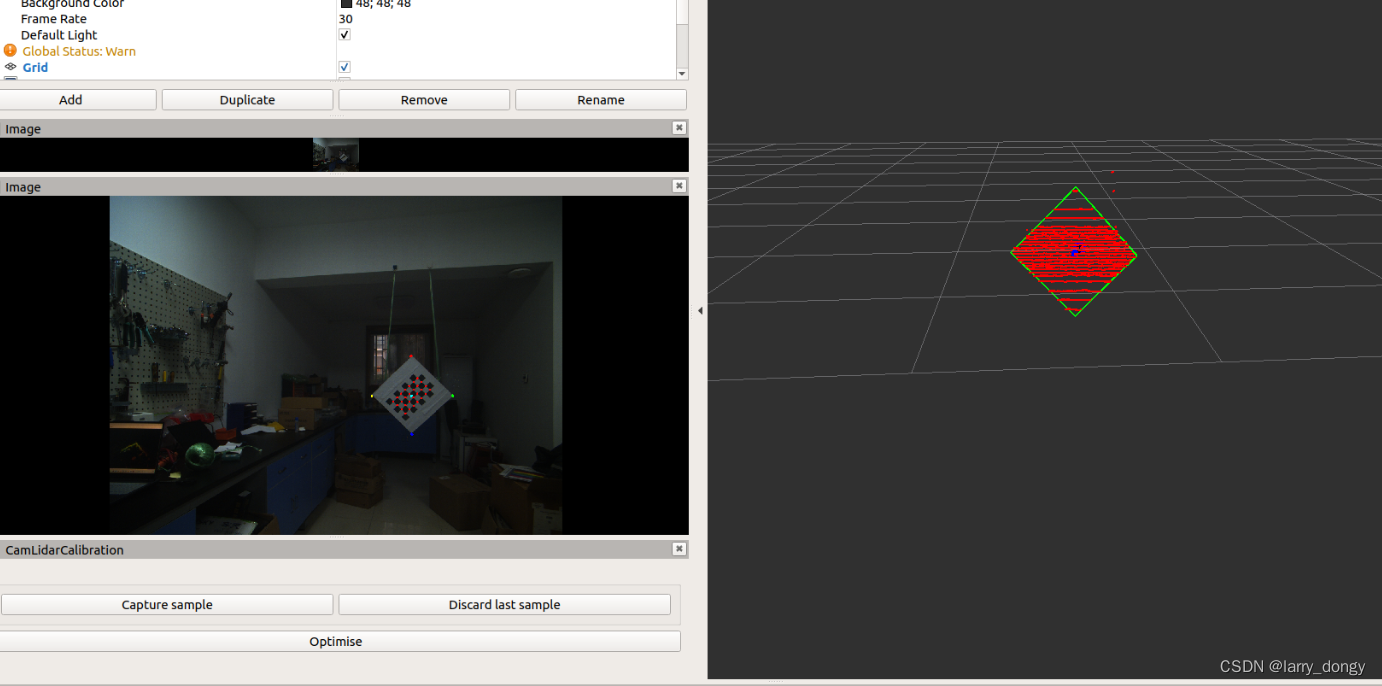 如果成功检测,节点会发布图像中检测的棋盘格和角点,同时点云的窗口会框出棋盘格边界线。如果标定的不准,可以放弃这次截取。
如果成功检测,节点会发布图像中检测的棋盘格和角点,同时点云的窗口会框出棋盘格边界线。如果标定的不准,可以放弃这次截取。
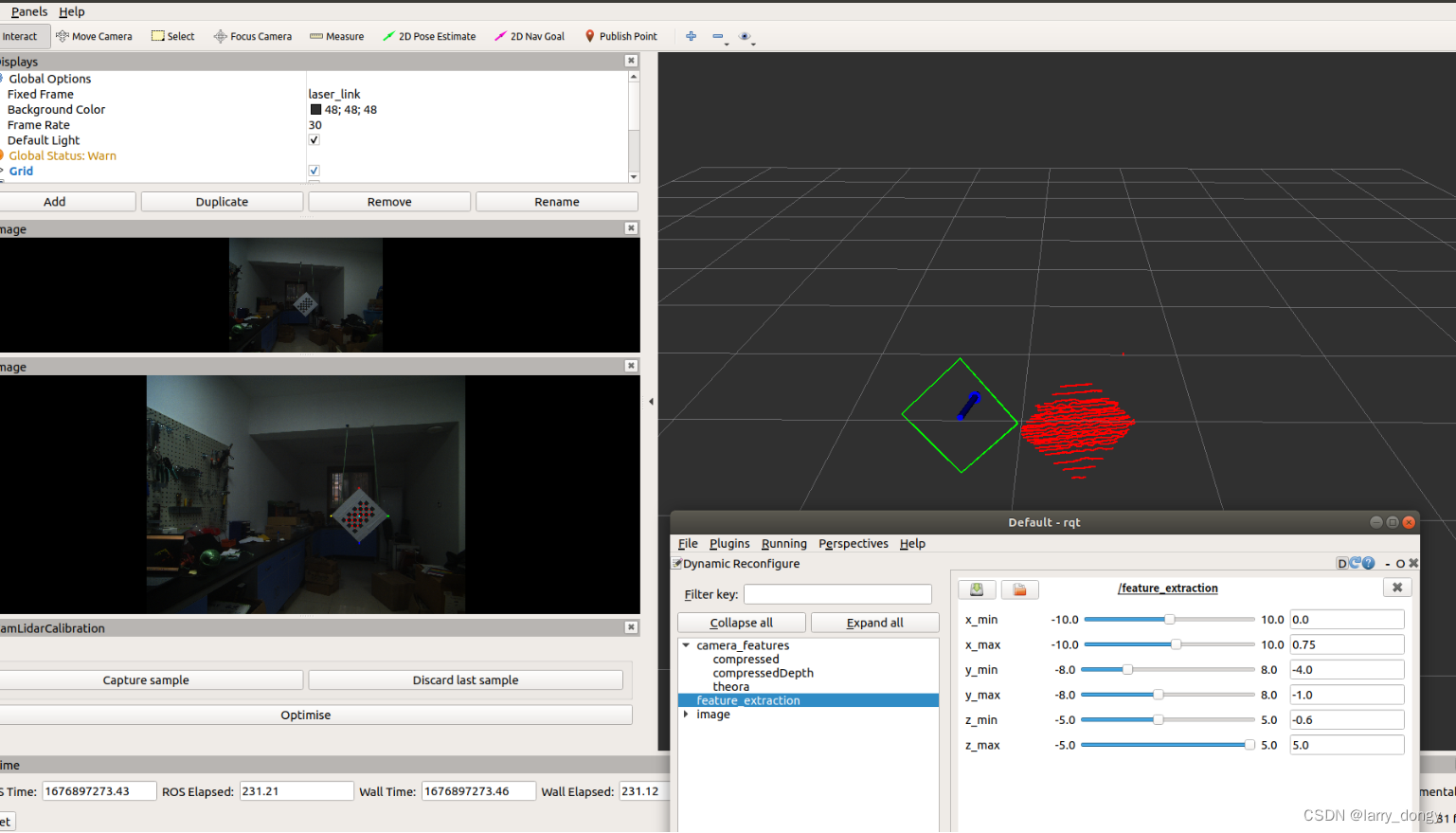 再开始下一次截取。可以后台更换rosbag,所以原始数据可以每次保持静止,搞一个rosbag后调整位置,再录制。
再开始下一次截取。可以后台更换rosbag,所以原始数据可以每次保持静止,搞一个rosbag后调整位置,再录制。
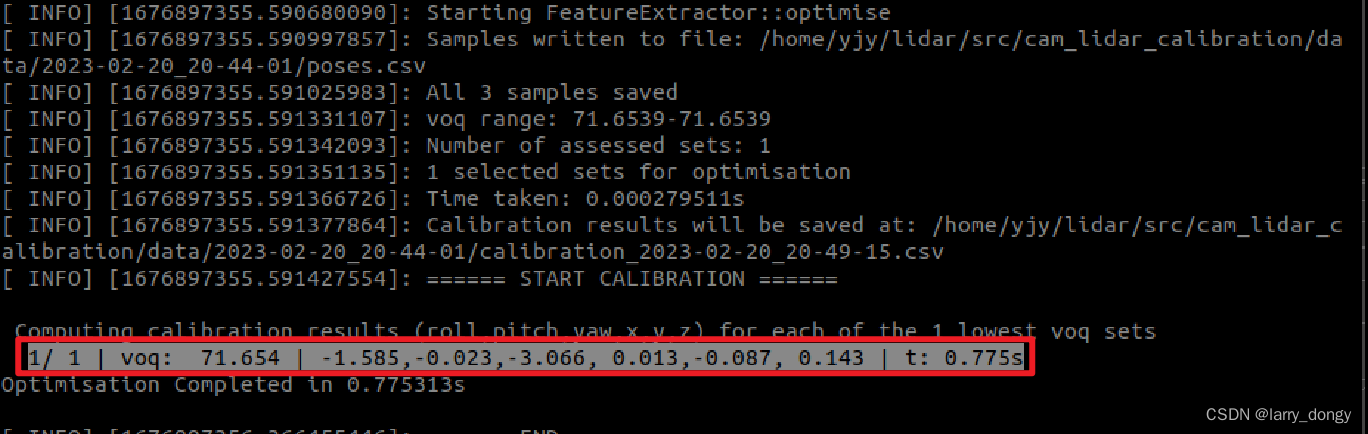 点击optimise后,后台开始优化。后台会将所有位姿任选3个进行组合,计算
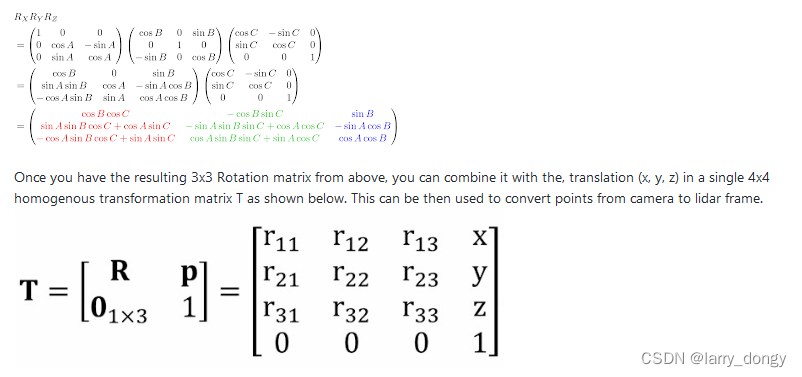
点击optimise后,后台开始优化。后台会将所有位姿任选3个进行组合,计算voq得分,然后选取得分最高的一组,进行后续优化。关于voq的含义查看论文。由于这次只录制了3组,所以只有1种组合。优化后的结果是“旋转向量+平移向量”形式,目测是从Lidar系到camera系的变化。其中旋转向量可以转成XYZ欧拉角,如下:
代码原理
代码原理也比较简单,虽然代码很多,但需要简单查看就可以发现主线很是清晰:
1. 接收图片和点云数据
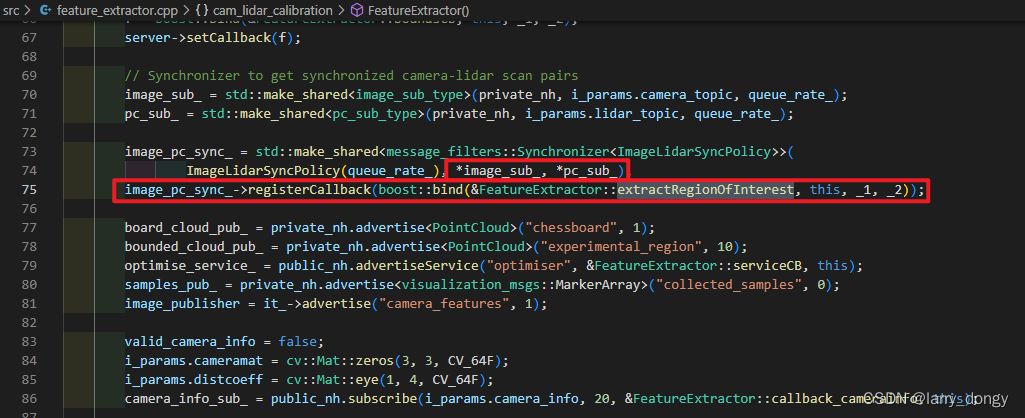 最开始程序会接收image和雷达pc两个数据,并通过message_filter进行时间上的同步,所以务必要保证雷达点云和相机的时间戳是基本同步的。同步接收后,会进入
最开始程序会接收image和雷达pc两个数据,并通过message_filter进行时间上的同步,所以务必要保证雷达点云和相机的时间戳是基本同步的。同步接收后,会进入extractRegionOfInterest回调。
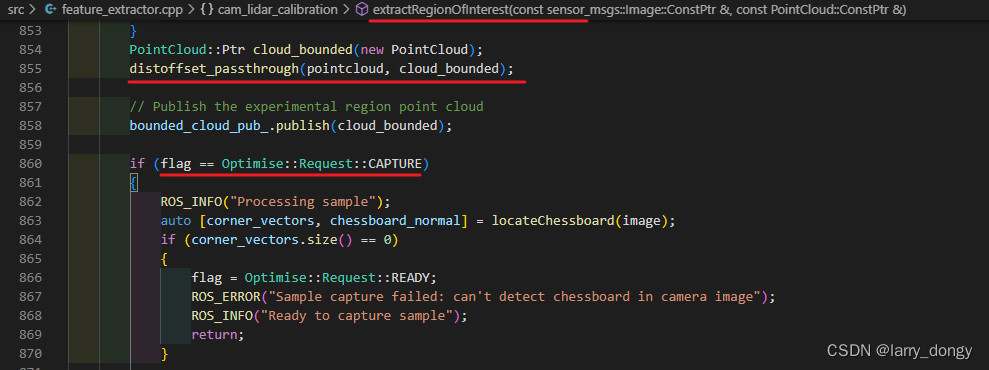 进入回调后,会首先对点云进行滤波即根据rqt设定的动态参数截取棋盘格区域。之后当点击 capture 按键后进入flag内的代码,进行一次请求。
进入回调后,会首先对点云进行滤波即根据rqt设定的动态参数截取棋盘格区域。之后当点击 capture 按键后进入flag内的代码,进行一次请求。
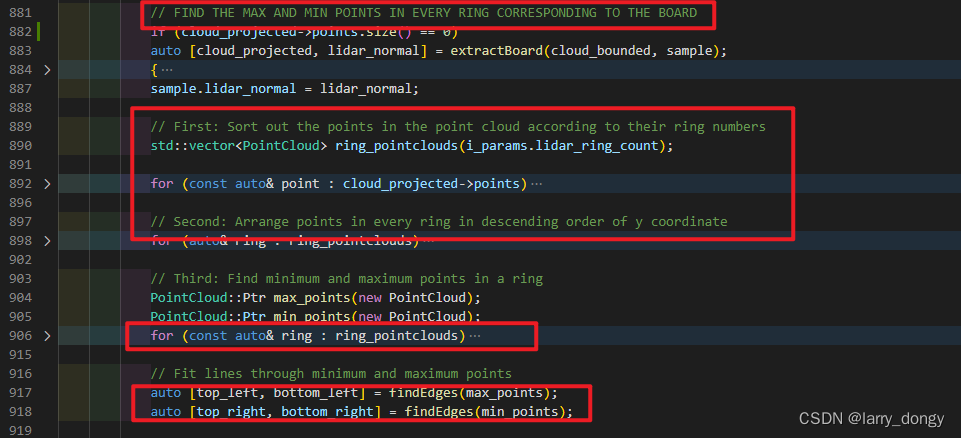 对于图像检测chessboard就没啥特殊的了。这里重点关注一下点云的处理:首先根据雷达扫描的ring的信息,提取每条ring的最大y值和最小y值,然后第一个和最后一个作为这条ring的起止点。所有的ring处理完后,就得到了棋盘格的四条边。之后四条边进行ransac拟合直线,再计算棋盘格角点。
对于图像检测chessboard就没啥特殊的了。这里重点关注一下点云的处理:首先根据雷达扫描的ring的信息,提取每条ring的最大y值和最小y值,然后第一个和最后一个作为这条ring的起止点。所有的ring处理完后,就得到了棋盘格的四条边。之后四条边进行ransac拟合直线,再计算棋盘格角点。
可以看出,这种计算方法:1)需要雷达具备ring信息(如果不具备请参考上一篇帖子:【将镭神C32激光雷达的PointXYZ数据转化为PointXYZIR格式 - 附代码】;2)要求这条ring不要扫到非棋盘格的点,即上一步进行区域筛选时不要有非棋盘格以外的点。
为了达到 2)这个要求,棋盘格一般与周围物体分离。例如代码作者采用三脚架固定:
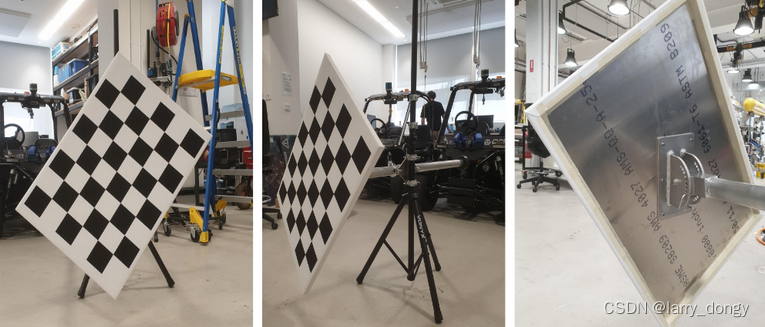
而我这边则是“挂起来”:

注意事项
- 使用时需要按照代码要求,修改参数以及topic的名称;
- 如果相机不能自己发布
camera_info消息,则需要手动发送。手动造camera_info的方法之前也踩过坑:【ROS中生成CameraInfo消息】 - 如果雷达不具备ring的信息,则需要手动添加。手动计算ring信息的方法前连天踩的坑:【将镭神C32激光雷达的PointXYZ数据转化为PointXYZIR格式 - 附代码】
- 注意但凡涉及了点云,需要将frame_id设置成一致的,否则容易出问题;
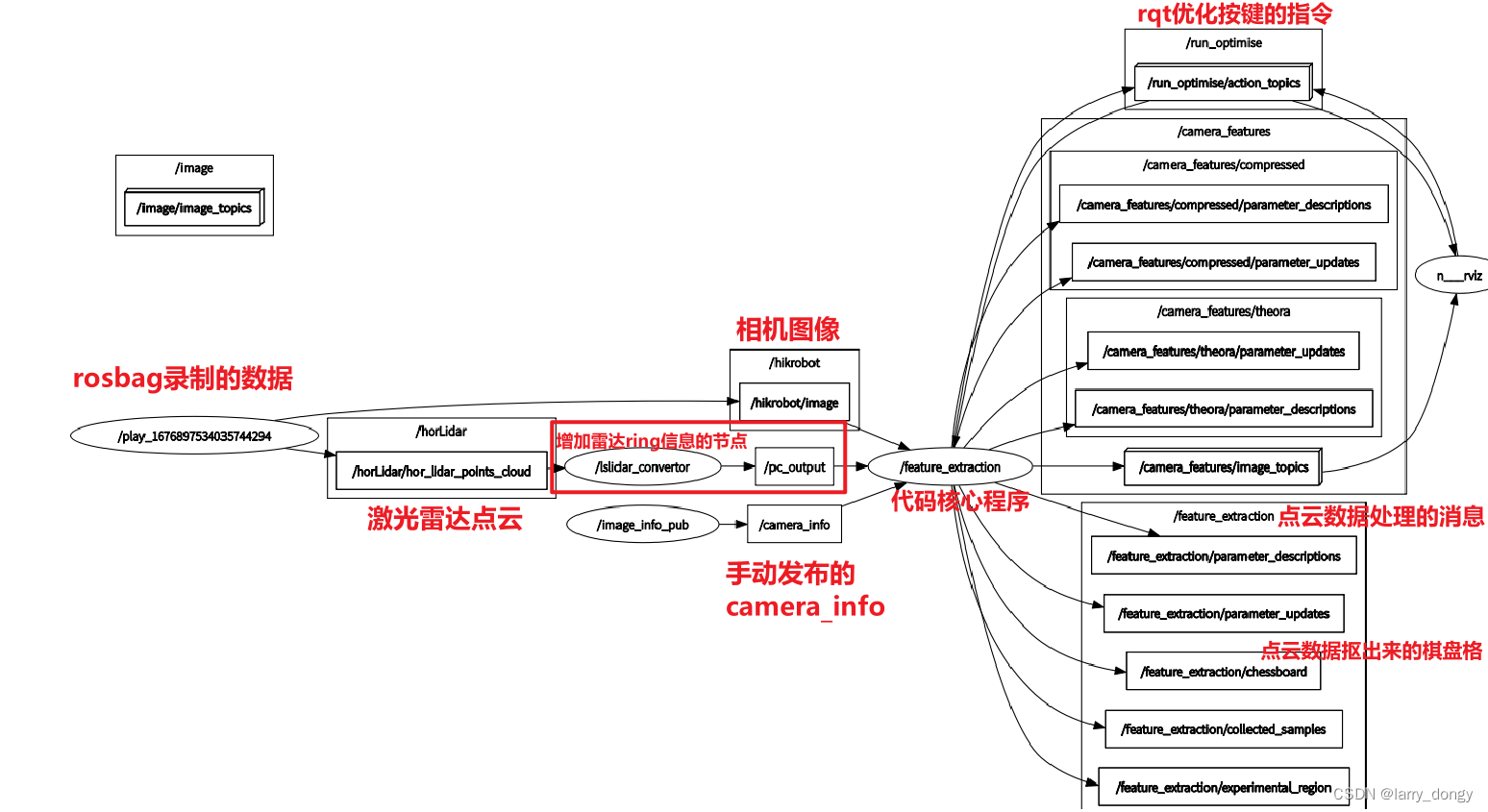
附我这边运行时的 rqt_graph 示意: