本文编辑:调皮哥的小助理

现代汽车雷达装置比手机还小,能探测前方、后方或侧方的盲点位置是否存在障碍物,但这还不百分之百实现全自动驾驶的。传统的汽车雷达分辨率都不高,只能“看到”一团东西,可以检测到汽车周围存在物体,如摩托车、卡车、行人,但无法确认目标到底是什么。
我个人认为“确定目标”可以作为雷达距离、速度、角度、高度之后的第五个维度,即识别,从而实现5D成像雷达。当然,有的雷达厂商会把微多普勒当作成像雷达的第五维,但是微多普勒的作用是帮助雷达更好地实现分类与识别,归根到底还是识别的问题。
为了能够清晰识别目标,需要研发能够检测、识别和理解汽车周围环境的技术。如今,在硬件检测技术和软件算法进步的推动下,雷达的分辨率得到了提高,能够分辨检测物体的属性,距离安全的全自动驾驶汽车又更近了一步,我认为其中的关键技术是:高级的雷达算法和高度集成的芯片技术。
实现目标识别的主要挑战依旧是雷达的分辨率,只有足够的分辨率,才能让雷达捕捉到目标的足够的信息,只有拥有足够的信息,才能让雷达算法具备高精度的识别性能,这个原则是不能违背的!
因此,目前雷达的发展主要聚焦在如何提高分辨率上,目的是为了使得雷达输出更多的点云,希望可以媲美激光雷达,甚至弥生了替代激光雷达的野心。雷达的距离分辨率通过增加带宽改善,速度分辨率通过波形设计改善,角度分辨率通过增大孔径以及超分辨算法改善。但这一切的都需要依托雷达芯片和硬件,因为硬件决定了算法的上限,不过点云多了,处理速度和存储也会受限。
传统汽车雷达在大FOV范围内提供大约10°到20°的水平角度分辨率,这种分辨率水平无法将SUV和停留在它旁边的摩托车区分开来,如图1所示,传统雷达无法区分临近的目标。
(图1 低分辨率雷达淹没目标)
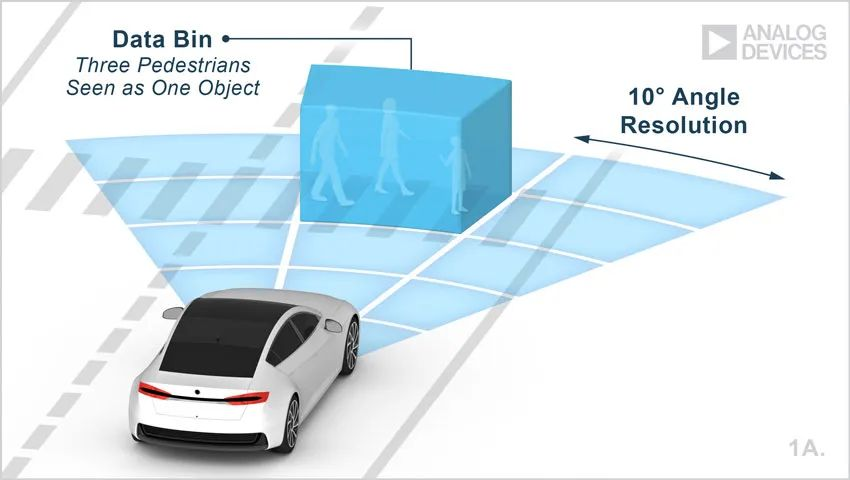
而成像雷达的角度分辨率为1°至2°,是非成像雷达分辨率的10倍,角度分辨单元获得1°到2°分辨率的信息,可以区分和确定3名行人的位置,如图2所示。
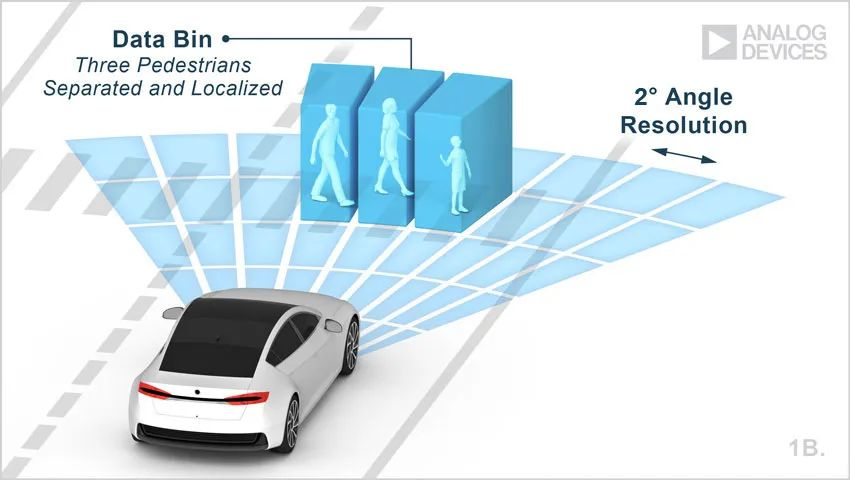
(图2 高分辨雷达显示临近目标)
雷达将无线电波发射到物体的各个角落,然后返回关于物体的RCS、位置、速度和到达角度等信息。如果物体小于分辨单元,则无法准确定位,或者可能被淹没在附近物体的一部分,这就是雷达面对弱目标存在的性能不足,因为雷达向来面对低小慢目标都很难具备良好的检测效果。
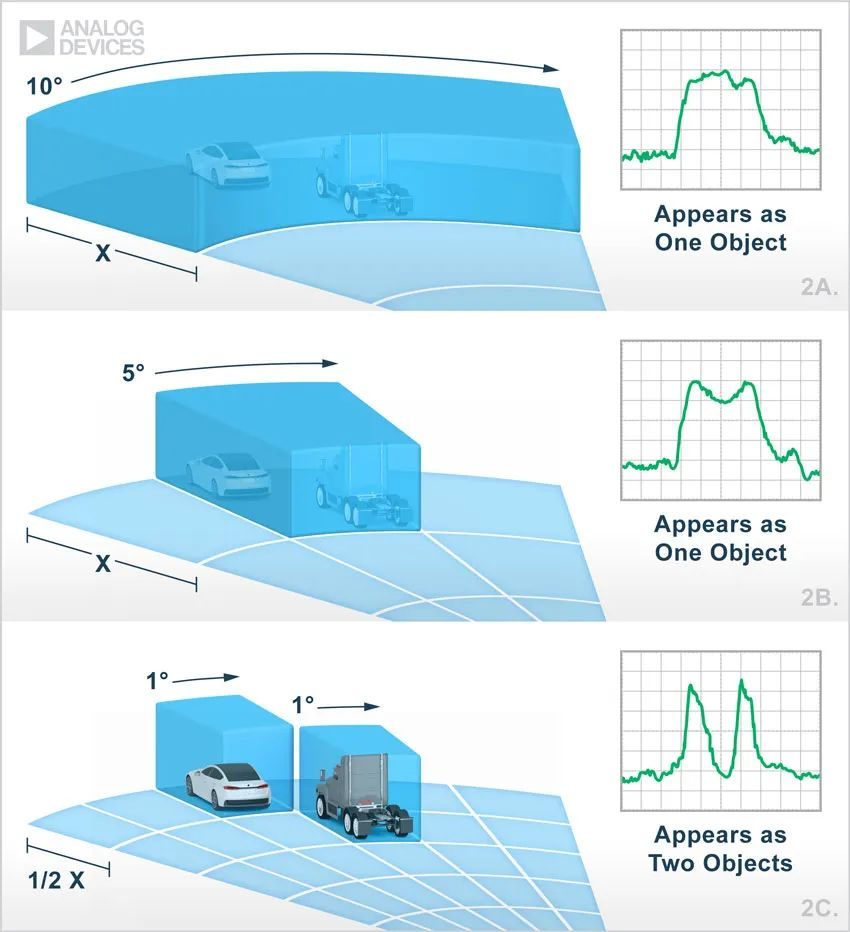
在A图中,在10°角度分辨率和较差的距离分辨率下,雷达将两辆车视为一个整体。在B图中,在5°分辨率和较好的距离分辨率下,两辆车仍然被视为一个整体。在C图中,在1°分辨率和更好的距离分辨率下,两个尖峰表示前面有两个不同的物体,甚至开始指出哪个是汽车,哪个是卡车。随着分辨力的提高,雷达识别现实世界的能力也就越强。
当汽车正在移动,雷达能够更好地识别它,这是因为雷达的多普勒频率模式能够将汽车与静止的背景(高架桥)区分开来。
但是,如果汽车保持静止,雷达可能无法识别,且会将该汽车视为地面的一部分。在这种情况下,车辆遇到每个高架桥时,都必须向前滑行或紧急制动,因为目前的雷达无法确定是否有车辆在高架桥下停车。4D成像雷达具有较高的水平角度和距离分辨率,且多普勒模式能够检测每个维度的微小移动,因此可以解决这个问题。
未来,垂直分辨率也将成为成像雷达系统的重要组成部分,进一步保障自动系统的安全性和冗余性。如今的成像雷达的角度分辨率约在1°左右,未来如何实现低于1°的分辨率,同时成本还要低,最好是比现在还低。目前,即使有部分雷达厂家实现了低于1°的分辨率,但是还是因为很多原因没有实现量产。另外,要想知道所在车道200米开外是否有摩托车存在,摩托车正在行驶还是停放,就需要水平和垂直都小于1°分辨率才有可能实现。
雷达工程师如何实现垂直高分辨率,能够在遇到地面(路面障碍)或地下问题(高度很低的地下通道)时提供自动驾驶,如何检测和减少来自对方雷达的干扰,以及如何设计雷达满足集中式和分布式架构的数据传输和散热需求,都是非常重要的工程问题,正在等待各位读者去研究和实现。
总而言之,汽车雷达还有很多问题等待诸位去解决,其前景还是很大的,相信未来会像和手机一样普遍。