数据集
使用的数据集是kaggle的Semantic segmentation of aerial imagery
其数据的组织形式为
项目结构
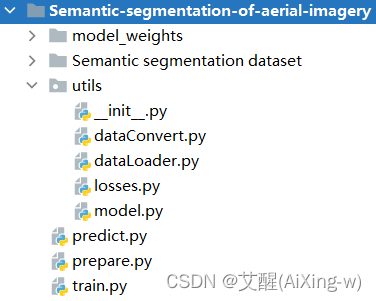
utils
dataConvert.py
dataConvert中主要包含数据的变换过程
| 函数 | 作用 |
|---|---|
| loadColorMap | 用于加载标签的颜色映射 |
| voc_colormap2label | 获取颜色标签到数值标签的映射关系 |
| voc_rand_crop | 用于裁剪数据 |
| voc_label_indices | 将RGB标签转换成数值标签 |
| one hot | 将标签转换成one hot |
dataLoader.py
dataLoader.py包含数据的加载过程
| 类/函数 | 作用 |
|---|---|
| SemanticDataset | 数据加载类,包含数据归一化,数据裁剪过程,用于加载数据 |
| load_data_voc | 调用SemanticDataset批量加载训练集和测试集 |
losses.py
定义损失函数,本项目中采用的是Focal loss和Dice loss相加作为损失函数
model.py
包含U-net模型和deeplabv3+两种模型,在训练和测试过程可以通过修改参数进行选择
prepare模块
这个模块在训练前执行,是整个项目的准备工作
函数
| 函数 | 作用 |
|---|---|
| semantic2dataset | 航拍数据集转换成语义分割的数据集 |
| trainValSplit | 分割训练集和测试集 |
| getMeanStd | 获取均值和方差 |
| writeColorClasses | 保存颜色和类别 |
参数
参数只有两个,就是颜色映射和类别,在本项目中这两个参数为
VOC_COLORMAP = [[226, 169, 41], [132, 41, 246], [110, 193, 228], [60, 16, 152], [254, 221, 58], [155, 155, 155]]
VOC_CLASSES = ['Water', 'Land (unpaved area)', 'Road', 'Building', 'Vegetation', 'Unlabeled']
train模块
函数
train
根据传入的参数进行训练
参数
| 参数 | 作用 |
|---|---|
| batch_size | 批量大小,在语义分割中可以设置小一些 |
| crop_size | 裁剪图像大小 |
| model_choice | 模型的选择,可选U-net、deeplabv3+ |
| in_channels | 输入图像通道数,RGB图像为3,灰度图为1 |
| out_channels | 输出标签类别,本项目中为6 |
| num_epochs | 训练总轮次 |
| auto_save | 自动保存权值的间隔轮次 |
| lr | 学习率 |
| device | 训练使用的环境,当cuda可用时自动设为cuda,否则自动设为cpu |
predict模块
predict模块只是浅测一下模型的精度和效果,如果需要应用可以调用predict函数进行预测并与实际应用结合
函数
| 函数 | 作用 |
|---|---|
| label2image | 数值标签转换成RGB标签 |
| predict | 单张图片的预测 |
| read_voc_images | 读取图片 |
| plotPredictAns | 画出测试结果 |
参数
| 参数 | 作用 |
|---|---|
| voc_dir | 测试数据的路径 |
| means | 图像均值 |
| stds | 图像方差 |
| device | 训练使用的环境,当cuda可用时自动设为cuda,否则自动设为cpu |
| batch_size | 批量大小 |
| model_choice | 模型的选择,可选U-net、deeplabv3+ |
下载地址
GitHub下载地址:Semantic-segmentation-for-aerial
详细讲解
语义分割项目(一)——数据概况及预处理
语义分割项目(二)——标签转换与数据加载
语义分割项目(三)——语义分割模型(U-net和deeplavb3+)
语义分割项目(四)——模型训练与预测