RT-Thread SPI 使用教程
实验环境使用的是正点原子的潘多拉开发板。
SPI从机设备使用的是BMP280温湿度大气压传感器。
使用RT-Thread Studio搭建基础功能。
1. 创建工程
使用RT-Thread Studio IDE创建芯片级的工程。创建完成后,可以直接编译下载进行测试。
2. 添加驱动
2.1 工程配置
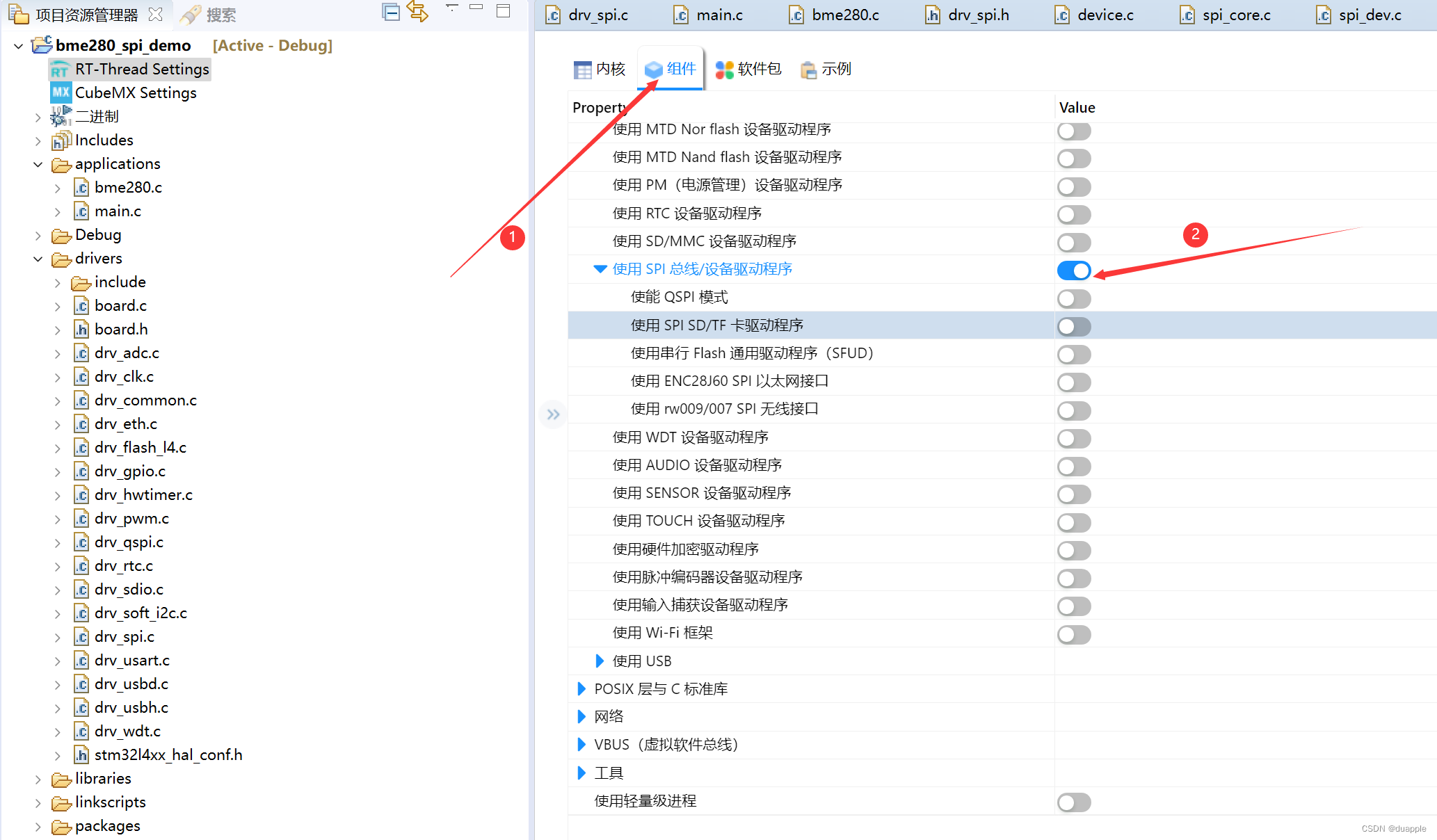
工程创建完成后,在RT-Thread Studio的组建和服务层/Drivers/SPI中开启SPI驱动。

然后对SPI进行配置:
配置完成后,Ctrl+S保存配置会自动更新工程代码。
完成配置后,还需要在board.h中打开需要使用的那一路SPI的宏。
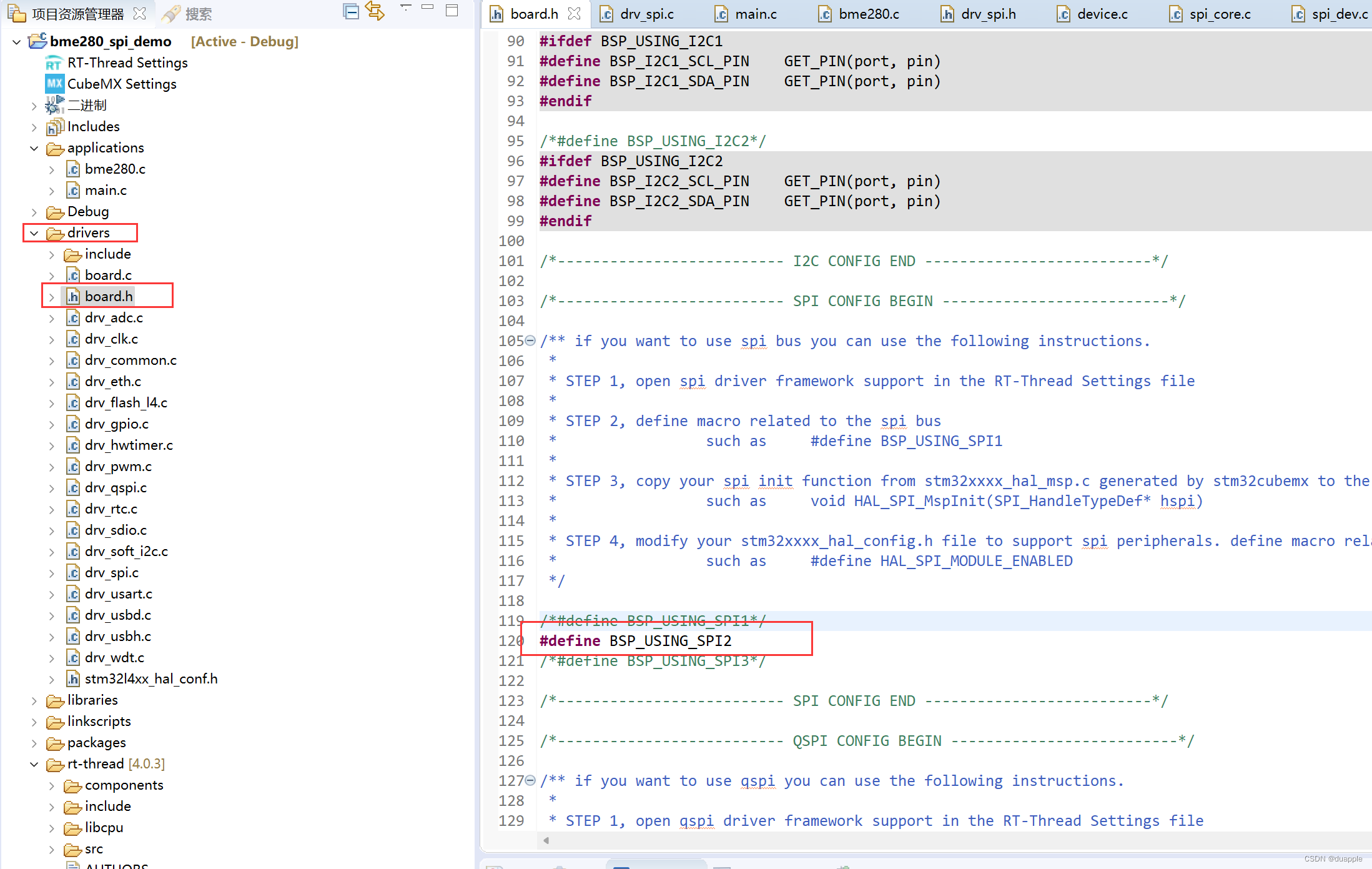
再在board.c中添加STM32的SPI初始化代码,可以通过配置CubeMX生成代码:
SPI_HandleTypeDef hspi2;
/* SPI2 init function */
void MX_SPI2_Init(void)
{
hspi2.Instance = SPI2;
hspi2.Init.Mode = SPI_MODE_MASTER;
hspi2.Init.Direction = SPI_DIRECTION_2LINES;
hspi2.Init.DataSize = SPI_DATASIZE_8BIT;
hspi2.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi2.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi2.Init.NSS = SPI_NSS_SOFT;
hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2;
hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi2.Init.TIMode = SPI_TIMODE_DISABLE;
hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi2.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi2) != HAL_OK)
{
Error_Handler();
}
}
void HAL_SPI_MspInit(SPI_HandleTypeDef* spiHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(spiHandle->Instance==SPI2)
{
/* USER CODE BEGIN SPI2_MspInit 0 */
/* USER CODE END SPI2_MspInit 0 */
/* SPI2 clock enable */
__HAL_RCC_SPI2_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**SPI2 GPIO Configuration
PB13 ------> SPI2_SCK
PB14 ------> SPI2_MISO
PB15 ------> SPI2_MOSI
*/
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF5_SPI2;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USER CODE BEGIN SPI2_MspInit 1 */
/* USER CODE END SPI2_MspInit 1 */
}
}
void HAL_SPI_MspDeInit(SPI_HandleTypeDef* spiHandle)
{
if(spiHandle->Instance==SPI2)
{
/* USER CODE BEGIN SPI2_MspDeInit 0 */
/* USER CODE END SPI2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_SPI2_CLK_DISABLE();
/**SPI2 GPIO Configuration
PB13 ------> SPI2_SCK
PB14 ------> SPI2_MISO
PB15 ------> SPI2_MOSI
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15);
/* USER CODE BEGIN SPI2_MspDeInit 1 */
/* USER CODE END SPI2_MspDeInit 1 */
}
}
完成后,SPI的驱动就算是添加完成了。
2.2 代码分析
2.2.1 SPI驱动使用流程
- SPI总线设备通过
rt_spi_bus_register()接口注册到SPI设备驱动框架中。 - SPI设备驱动框架通过
rt_device_register()接口将SPI总线设备注册到I/O设备管理器中。 - SPI从机驱动程序通过
rt_spi_bus_attach_device()接口将从设备挂载到SPI总线设备上,并注册到SPI设备驱动框架中。 - SPI从机驱动通过SPI设备接口访问SPI从机设备硬件。
2.2.2 代码
在drivers group中的drv_spi.c中:
int rt_hw_spi_init(void)
{
stm32_get_dma_info();
return rt_hw_spi_bus_init();
}
INIT_BOARD_EXPORT(rt_hw_spi_init);
通过这里的INIT_BOARD_EXPORT()申明,添加初始化代码到.rti_fn.1 段:
#define INIT_EXPORT(fn, level) \
RT_USED const init_fn_t __rt_init_##fn SECTION(".rti_fn." level) = fn
#define INIT_BOARD_EXPORT(fn) INIT_EXPORT(fn, "1")
然后在board.c中的rt_hw_board_init() -> rt_components_board_init() 中集中去初始化设备驱动。
void rt_components_board_init(void)
{
volatile const init_fn_t *fn_ptr;
for (fn_ptr = &__rt_init_rti_board_start; fn_ptr < &__rt_init_rti_board_end; fn_ptr++)
{
(*fn_ptr)();
}
#endif
}
rt_hw_spi_bus_init() 又调用了rt_spi_bus_register() ,rt_spi_bus_register() 调用rt_spi_bus_device_init()去调用rt_device_register() 完成注册。
static rt_err_t spi_configure(struct rt_spi_device *device,
struct rt_spi_configuration *configuration)
{
RT_ASSERT(device != RT_NULL);
RT_ASSERT(configuration != RT_NULL);
struct stm32_spi *spi_drv = rt_container_of(device->bus, struct stm32_spi, spi_bus);
spi_drv->cfg = configuration;
return stm32_spi_init(spi_drv, configuration);
}
static const struct rt_spi_ops stm_spi_ops =
{
.configure = spi_configure,
.xfer = spixfer,
};
HAL_SPI_Init()初始化在stm32_spi_init()中被完成,注册到了ops中。在attach后,直接调用rt_spi_configure() 来完成初始化。
注意,和i2c使用不同,SPI必须要通过attach绑定,才能使用SPI设备接口。
3. 使用SPI
完成bmp280的读取Device ID的代码编写,添加到文件中bmp280.c中,再将文件添加到工程中:
#include <rtthread.h>
#include <rtdevice.h>
#include <drv_spi.h>
#define BME280_SPI_DEVICE_NAME "spi20"
#define BEM280_REG_ID 0XD0
rt_bool_t initialnized = RT_FALSE;
static void spi_bme280_demo(void)
{
uint8_t data = BEM280_REG_ID | (1 << 7);
rt_err_t err;
struct rt_spi_device * spi_bme280;
if (!initialnized) {
initialnized = RT_TRUE;
err = rt_hw_spi_device_attach("spi2", BME280_SPI_DEVICE_NAME, GPIOB, GPIO_PIN_12);
if (err) {
rt_kprintf("attach device error\r\n");
return ;
}
}
spi_bme280 = (struct rt_spi_device *)rt_device_find(BME280_SPI_DEVICE_NAME);
if (spi_bme280 == RT_NULL) {
rt_kprintf("find %s error\r\n", BME280_SPI_DEVICE_NAME);
return ;
}
struct rt_spi_configuration cfg = {
.mode = RT_SPI_MASTER | RT_SPI_MODE_0 | RT_SPI_MSB,
.data_width = 8,
.max_hz = 1 * 1000 * 1000
};
err = rt_spi_configure(spi_bme280, &cfg);
if (err != RT_NULL) {
rt_kprintf("spi configurate error\r\n");
return ;
}
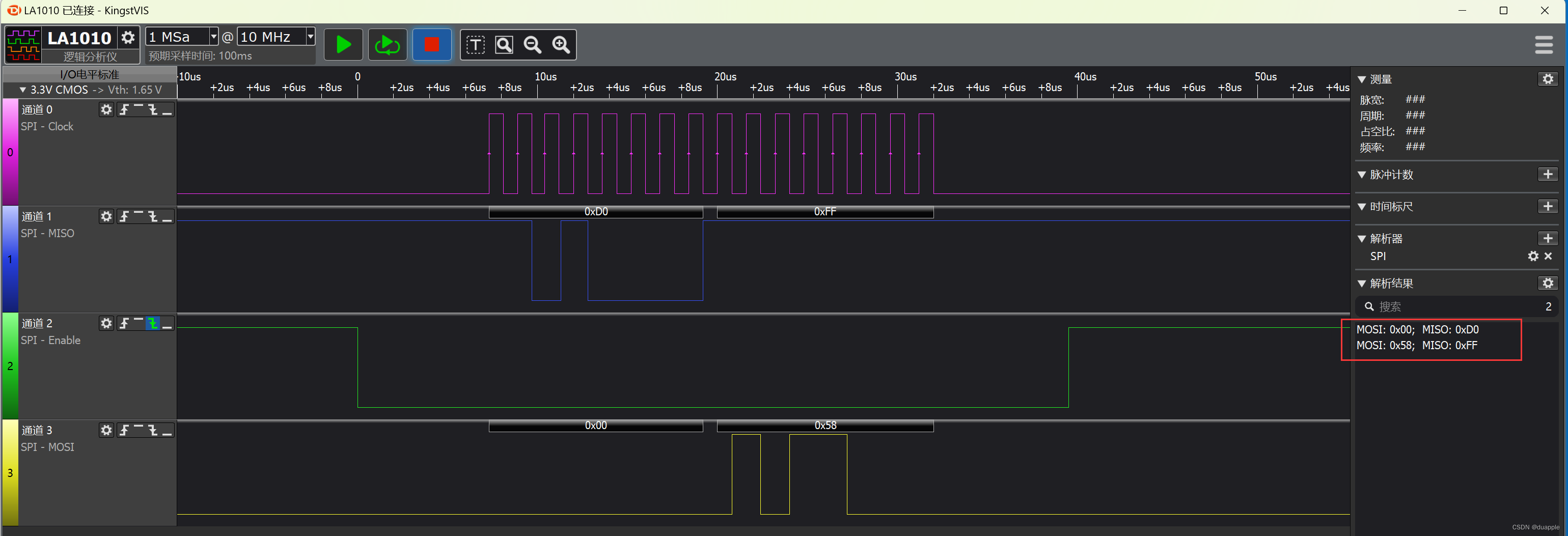
uint8_t send_buf[5] = {data, 0xff};
uint8_t recv_buf[5];
if (rt_spi_transfer(spi_bme280, send_buf, recv_buf, 2) == 0) {
rt_kprintf("spi transfer error\r\n");
}
rt_kprintf("bme280 id: 0x%02x\r\n", recv_buf[1]);
}
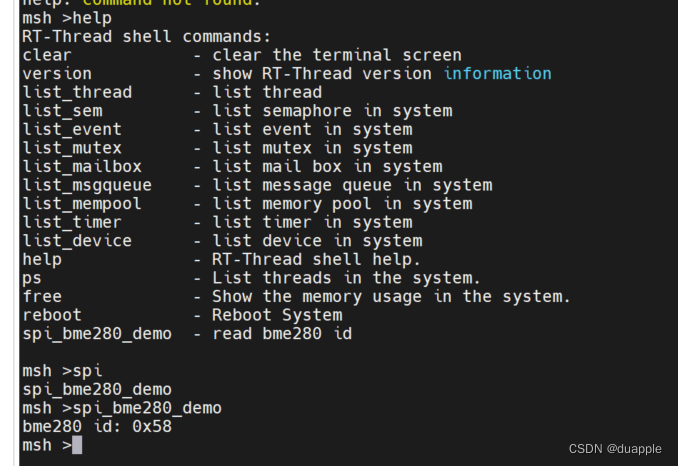
MSH_CMD_EXPORT(spi_bme280_demo, read bme280 id);
这里我使用的CS Pin是PB12,注意attach接口参数。
4. 测试
BMP280的Device ID是0x58, BME280是0x60。
编译上述工程并烧录,输入命令进行验证: