VINS中没有直接使用opencv的去畸变函数,而是自己编写了迭代函数完成去畸变操作,主要是为了加快去畸变计算速度
本文对二者的结果精度和耗时进行了对比
VINS-Mono/Fusion与OpenCV去畸变对比
- 1 去畸变原理
- 2 代码实现
- 2.1 OpenCV去畸变
- 2.2 VINS去畸变
- 3 二者对比
1 去畸变原理
opencv去畸变操作由cv::undistortPoints实现
VINS去畸变由PinholeCamera::liftProjective实现(以针孔相机为例)
二者均采用了迭代求解,通过多次迭代逼近真值。其中cv::undistortPoints方法中默认迭代5次,并计算每次重投影误差是否小于阈值,VINS去畸变方法只设置了迭代8次。
二者均输入像素坐标,输出归一化坐标。
2 代码实现
2.1 OpenCV去畸变
opencv去畸变操作由cv::undistortPoints实现,代码在opencv-3.4.13/modules/imgproc/src
undistortPoints首先处理了输入参数,主要实现部分调用cvUndistortPointsInternal
void undistortPoints( InputArray _src, OutputArray _dst,InputArray _cameraMatrix, InputArray _distCoeffs,InputArray _Rmat, InputArray _Pmat, TermCriteria criteria)
void undistortPoints( InputArray _src, OutputArray _dst,
InputArray _cameraMatrix,
InputArray _distCoeffs,
InputArray _Rmat,
InputArray _Pmat,
TermCriteria criteria)
{
Mat src = _src.getMat(), cameraMatrix = _cameraMatrix.getMat();
Mat distCoeffs = _distCoeffs.getMat(), R = _Rmat.getMat(), P = _Pmat.getMat();
int npoints = src.checkVector(2), depth = src.depth();
if (npoints < 0)
src = src.t();
npoints = src.checkVector(2);
CV_Assert(npoints >= 0 && src.isContinuous() && (depth == CV_32F || depth == CV_64F));
if (src.cols == 2)
src = src.reshape(2);
_dst.create(npoints, 1, CV_MAKETYPE(depth, 2), -1, true);
Mat dst = _dst.getMat();
CvMat _csrc = cvMat(src), _cdst = cvMat(dst), _ccameraMatrix = cvMat(cameraMatrix);
CvMat matR, matP, _cdistCoeffs, *pR=0, *pP=0, *pD=0;
if( !R.empty() )
pR = &(matR = cvMat(R));
if( !P.empty() )
pP = &(matP = cvMat(P));
if( !distCoeffs.empty() )
pD = &(_cdistCoeffs = cvMat(distCoeffs));
cvUndistortPointsInternal(&_csrc, &_cdst, &_ccameraMatrix, pD, pR, pP, criteria);
}
static void cvUndistortPointsInternal( const CvMat* _src, CvMat* _dst, const CvMat* _cameraMatrix, const CvMat* _distCoeffs, const CvMat* matR, const CvMat* matP, cv::TermCriteria criteria)
static void cvUndistortPointsInternal( const CvMat* _src, CvMat* _dst, const CvMat* _cameraMatrix,
const CvMat* _distCoeffs,
const CvMat* matR, const CvMat* matP, cv::TermCriteria criteria)
{
CV_Assert(criteria.isValid());
double A[3][3], RR[3][3], k[14]={0,0,0,0,0,0,0,0,0,0,0,0,0,0};
CvMat matA=cvMat(3, 3, CV_64F, A), _Dk;
CvMat _RR=cvMat(3, 3, CV_64F, RR);
cv::Matx33d invMatTilt = cv::Matx33d::eye();
cv::Matx33d matTilt = cv::Matx33d::eye();
CV_Assert( CV_IS_MAT(_src) && CV_IS_MAT(_dst) &&
(_src->rows == 1 || _src->cols == 1) &&
(_dst->rows == 1 || _dst->cols == 1) &&
_src->cols + _src->rows - 1 == _dst->rows + _dst->cols - 1 &&
(CV_MAT_TYPE(_src->type) == CV_32FC2 || CV_MAT_TYPE(_src->type) == CV_64FC2) &&
(CV_MAT_TYPE(_dst->type) == CV_32FC2 || CV_MAT_TYPE(_dst->type) == CV_64FC2));
CV_Assert( CV_IS_MAT(_cameraMatrix) &&
_cameraMatrix->rows == 3 && _cameraMatrix->cols == 3 );
cvConvert( _cameraMatrix, &matA );
if( _distCoeffs )
{
CV_Assert( CV_IS_MAT(_distCoeffs) &&
(_distCoeffs->rows == 1 || _distCoeffs->cols == 1) &&
(_distCoeffs->rows*_distCoeffs->cols == 4 ||
_distCoeffs->rows*_distCoeffs->cols == 5 ||
_distCoeffs->rows*_distCoeffs->cols == 8 ||
_distCoeffs->rows*_distCoeffs->cols == 12 ||
_distCoeffs->rows*_distCoeffs->cols == 14));
_Dk = cvMat( _distCoeffs->rows, _distCoeffs->cols,
CV_MAKETYPE(CV_64F,CV_MAT_CN(_distCoeffs->type)), k);
cvConvert( _distCoeffs, &_Dk );
if (k[12] != 0 || k[13] != 0)
{
cv::detail::computeTiltProjectionMatrix<double>(k[12], k[13], NULL, NULL, NULL, &invMatTilt);
cv::detail::computeTiltProjectionMatrix<double>(k[12], k[13], &matTilt, NULL, NULL);
}
}
if( matR )
{
CV_Assert( CV_IS_MAT(matR) && matR->rows == 3 && matR->cols == 3 );
cvConvert( matR, &_RR );
}
else
cvSetIdentity(&_RR);
if( matP )
{
double PP[3][3];
CvMat _P3x3, _PP=cvMat(3, 3, CV_64F, PP);
CV_Assert( CV_IS_MAT(matP) && matP->rows == 3 && (matP->cols == 3 || matP->cols == 4));
cvConvert( cvGetCols(matP, &_P3x3, 0, 3), &_PP );
cvMatMul( &_PP, &_RR, &_RR );
}
const CvPoint2D32f* srcf = (const CvPoint2D32f*)_src->data.ptr;
const CvPoint2D64f* srcd = (const CvPoint2D64f*)_src->data.ptr;
CvPoint2D32f* dstf = (CvPoint2D32f*)_dst->data.ptr;
CvPoint2D64f* dstd = (CvPoint2D64f*)_dst->data.ptr;
int stype = CV_MAT_TYPE(_src->type);
int dtype = CV_MAT_TYPE(_dst->type);
int sstep = _src->rows == 1 ? 1 : _src->step/CV_ELEM_SIZE(stype);
int dstep = _dst->rows == 1 ? 1 : _dst->step/CV_ELEM_SIZE(dtype);
double fx = A[0][0];
double fy = A[1][1];
double ifx = 1./fx;
double ify = 1./fy;
double cx = A[0][2];
double cy = A[1][2];
int n = _src->rows + _src->cols - 1;
for( int i = 0; i < n; i++ )
{
double x, y, x0 = 0, y0 = 0, u, v;
if( stype == CV_32FC2 )
{
x = srcf[i*sstep].x;
y = srcf[i*sstep].y;
}
else
{
x = srcd[i*sstep].x;
y = srcd[i*sstep].y;
}
u = x; v = y;
x = (x - cx)*ifx;
y = (y - cy)*ify;
if( _distCoeffs ) {
// compensate tilt distortion
cv::Vec3d vecUntilt = invMatTilt * cv::Vec3d(x, y, 1);
double invProj = vecUntilt(2) ? 1./vecUntilt(2) : 1;
x0 = x = invProj * vecUntilt(0);
y0 = y = invProj * vecUntilt(1);
double error = std::numeric_limits<double>::max();
// compensate distortion iteratively
for( int j = 0; ; j++ )
{
//在这里判断
if ((criteria.type & cv::TermCriteria::COUNT) && j >= criteria.maxCount)
break;
if ((criteria.type & cv::TermCriteria::EPS) && error < criteria.epsilon)
break;
double r2 = x*x + y*y;
double icdist = (1 + ((k[7]*r2 + k[6])*r2 + k[5])*r2)/(1 + ((k[4]*r2 + k[1])*r2 + k[0])*r2);
if (icdist < 0) // test: undistortPoints.regression_14583
{
x = (u - cx)*ifx;
y = (v - cy)*ify;
break;
}
double deltaX = 2*k[2]*x*y + k[3]*(r2 + 2*x*x)+ k[8]*r2+k[9]*r2*r2;
double deltaY = k[2]*(r2 + 2*y*y) + 2*k[3]*x*y+ k[10]*r2+k[11]*r2*r2;
x = (x0 - deltaX)*icdist;
y = (y0 - deltaY)*icdist;
if(criteria.type & cv::TermCriteria::EPS)
{
double r4, r6, a1, a2, a3, cdist, icdist2;
double xd, yd, xd0, yd0;
cv::Vec3d vecTilt;
r2 = x*x + y*y;
r4 = r2*r2;
r6 = r4*r2;
a1 = 2*x*y;
a2 = r2 + 2*x*x;
a3 = r2 + 2*y*y;
cdist = 1 + k[0]*r2 + k[1]*r4 + k[4]*r6;
icdist2 = 1./(1 + k[5]*r2 + k[6]*r4 + k[7]*r6);
xd0 = x*cdist*icdist2 + k[2]*a1 + k[3]*a2 + k[8]*r2+k[9]*r4;
yd0 = y*cdist*icdist2 + k[2]*a3 + k[3]*a1 + k[10]*r2+k[11]*r4;
vecTilt = matTilt*cv::Vec3d(xd0, yd0, 1);
invProj = vecTilt(2) ? 1./vecTilt(2) : 1;
xd = invProj * vecTilt(0);
yd = invProj * vecTilt(1);
double x_proj = xd*fx + cx;
double y_proj = yd*fy + cy;
error = sqrt( pow(x_proj - u, 2) + pow(y_proj - v, 2) );
}
}
}
double xx = RR[0][0]*x + RR[0][1]*y + RR[0][2];
double yy = RR[1][0]*x + RR[1][1]*y + RR[1][2];
double ww = 1./(RR[2][0]*x + RR[2][1]*y + RR[2][2]);
x = xx*ww;
y = yy*ww;
if( dtype == CV_32FC2 )
{
dstf[i*dstep].x = (float)x;
dstf[i*dstep].y = (float)y;
}
else
{
dstd[i*dstep].x = x;
dstd[i*dstep].y = y;
}
}
}
2.2 VINS去畸变
void
PinholeCamera::liftProjective(const Eigen::Vector2d& p, Eigen::Vector3d& P) const
{
double mx_d, my_d,mx2_d, mxy_d, my2_d, mx_u, my_u;
double rho2_d, rho4_d, radDist_d, Dx_d, Dy_d, inv_denom_d;
//double lambda;
// Lift points to normalised plane
mx_d = m_inv_K11 * p(0) + m_inv_K13;
my_d = m_inv_K22 * p(1) + m_inv_K23;
if (m_noDistortion)
{
mx_u = mx_d;
my_u = my_d;
}
else
{
if (0)
{
double k1 = mParameters.k1();
double k2 = mParameters.k2();
double p1 = mParameters.p1();
double p2 = mParameters.p2();
// Apply inverse distortion model
// proposed by Heikkila
mx2_d = mx_d*mx_d;
my2_d = my_d*my_d;
mxy_d = mx_d*my_d;
rho2_d = mx2_d+my2_d;
rho4_d = rho2_d*rho2_d;
radDist_d = k1*rho2_d+k2*rho4_d;
Dx_d = mx_d*radDist_d + p2*(rho2_d+2*mx2_d) + 2*p1*mxy_d;
Dy_d = my_d*radDist_d + p1*(rho2_d+2*my2_d) + 2*p2*mxy_d;
inv_denom_d = 1/(1+4*k1*rho2_d+6*k2*rho4_d+8*p1*my_d+8*p2*mx_d);
mx_u = mx_d - inv_denom_d*Dx_d;
my_u = my_d - inv_denom_d*Dy_d;
}
else
{
// Recursive distortion model
int n = 8;
Eigen::Vector2d d_u;
distortion(Eigen::Vector2d(mx_d, my_d), d_u);
// Approximate value
mx_u = mx_d - d_u(0);
my_u = my_d - d_u(1);
for (int i = 1; i < n; ++i)
{
distortion(Eigen::Vector2d(mx_u, my_u), d_u);
mx_u = mx_d - d_u(0);
my_u = my_d - d_u(1);
}
}
}
// Obtain a projective ray
P << mx_u, my_u, 1.0;
}
3 二者对比
在相机坐标系下随机生成了 20 个观测点,并将其归算到归一化坐标系下作为真值。
#include <iostream>
#include <vector>
#include <random>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include <opencv2/opencv.hpp>
#include <opencv2/core/eigen.hpp>
#include <chrono>
#include "Camera.h"
using namespace std;
int main()
{
// 随机数生成 20 个 三维特征点
int featureNums=20;
default_random_engine generator;
vector<cv::Point2f> pts_truth; //归一化真值
vector<cv::Point2f> uv_pts; //像素坐标
vector<cv::Point2f> cv_un_pts, vins_un_pts; //归一化坐标
for(int i = 0; i < featureNums; ++i)
{
uniform_real_distribution<double> xy_rand(-4, 4.0);
uniform_real_distribution<double> z_rand(8., 10.);
double tx = xy_rand(generator);
double ty = xy_rand(generator);
double tz = z_rand(generator);
Eigen::Vector2d p(tx/tz, ty/tz);
Eigen::Vector2d p_distorted;
distortion(p, p_distorted); //归一化坐标畸变
p_distorted+=p;
pts_truth.push_back(cv::Point2f(p(0), p(1)));
cv::Point2f uv(fx*p_distorted(0)+cx, fy*p_distorted(1)+cy); //投影到像素坐标
uv_pts.push_back(uv);
}
//OpenCV去畸变,输入像素坐标,输出归一化坐标
chrono::steady_clock::time_point cv_t1 = chrono::steady_clock::now();
cv::undistortPoints(uv_pts, cv_un_pts, K, distCoeffs);
chrono::steady_clock::time_point cv_t2 = chrono::steady_clock::now();
double cv_time = chrono::duration_cast<chrono::duration<double,milli>>(cv_t2-cv_t1).count();
cout<<"OpenCV"<<endl;
cout<<"used time: "<<cv_time/cv_un_pts.size()<<"ms"<<endl;
cout<<"pixel error: "<<GetResidual(cv_un_pts, pts_truth)<<endl;
//VINS去畸变
chrono::steady_clock::time_point vins_t1 = chrono::steady_clock::now();
liftProjective(uv_pts, vins_un_pts);
chrono::steady_clock::time_point vins_t2 = chrono::steady_clock::now();
double vins_time = chrono::duration_cast<chrono::duration<double, milli>>(vins_t2-vins_t1).count();
cout<<"VINS"<<endl;
cout<<"used time: "<<vins_time/vins_un_pts.size()<<"ms"<<endl;
cout<<"pixel error: "<<GetResidual(vins_un_pts, pts_truth)<<endl;
return 0;
}
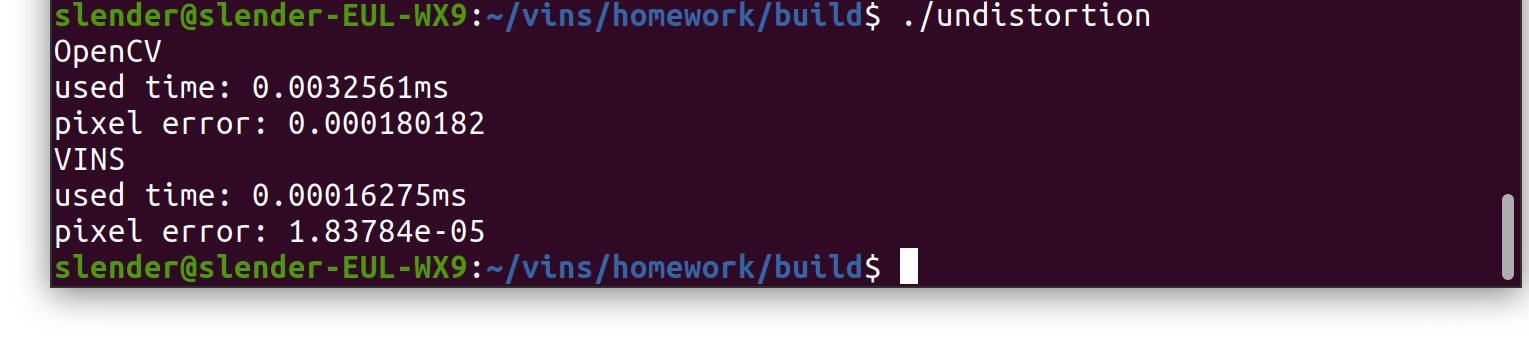
输出结果
给出了每个观测点的平均去畸变耗时和像素坐标系下的重投影误差。
VINS所采用的去畸变算法耗时更少,重投影误差平均值更小,opencv方法与其相差一个数量级。




![Reverse入门[不断记录]](https://img-blog.csdnimg.cn/4f5350c563364eac9cdf63440df5b863.png)