目 录
- 一、前言
- 二、Hydro Properties
- 2.1 Compartment Properties
- 2.2 Rudder and Thruster
- 2.3 Wind Properties
- 三、Hydro Structure
- 3.1 Load Cross Sections
- 四、Loading Conditions
- 4.1 Mass Model
- 4.2 Second Order Surface Model
- 4.3 Wadam Offbody Points
- 4.4 Additional Matrices
- 五、参考文献
一、前言
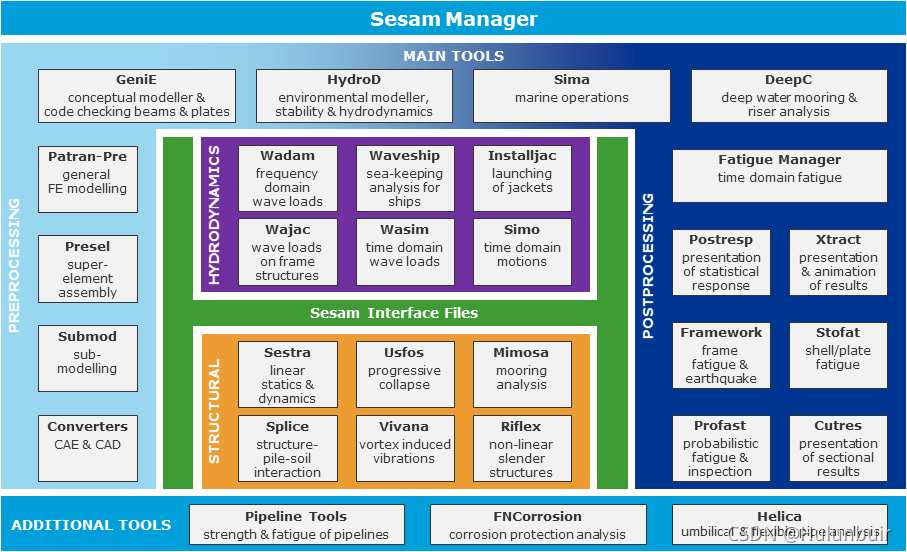
SESAM (Super Element Structure Analysis Module)是由挪威船级社(DNV-GL)开发的一款有限元分析(FEA)系统,它以 GeniE、HydroD 和 DeepC 等模块为核心,是海洋工程结构分析的行业标准软件,主要用于海工结构的强度评估、波浪荷载计算和系泊系统分析等。GeniE、HydroD 和 DeepC 分别是 Sesam 系统的固定式结构分析模块、漂浮式结构分析模块和系泊系统分析模块。HydroD is the software package for robust hydrodynamic analysis and stability analysis.
水动力模型(Hydro Model)定义了海工结构的几何和结构属性。根据是否直接作用于海床上,海工结构分为固定式(Fixed)和漂浮式(Floating)两大类。在 HydroD 中,不同的结构类型会执行不同的计算内容。对于固定式结构将计算激振力与漂移力(exciting and drift forces);对于漂浮式结构将计算附加质量、阻尼、激振力(exciting forces)等,且需要求解运动方程。
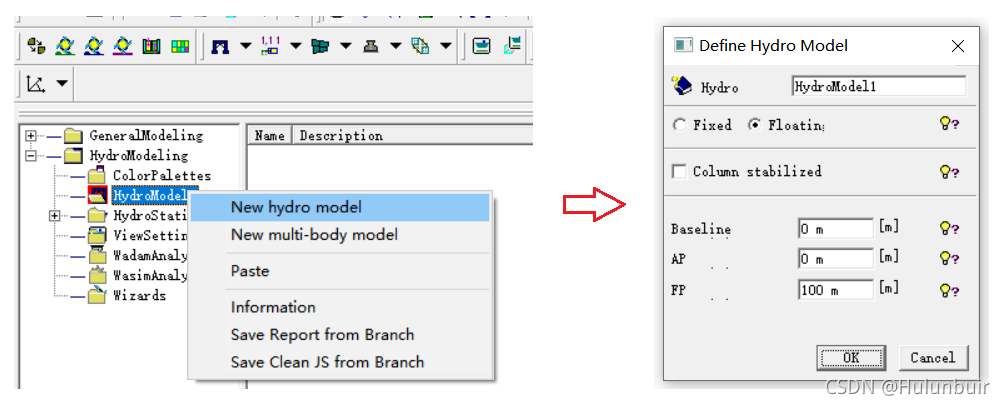
HydroModel1 = HydroModel(HydroModelFloating);
HydroModel1.setColumnStabilized(false);
HydroModel1.setBoundaryType(HydroModelFloating);
HydroModel1.setColumnStabilized(false);
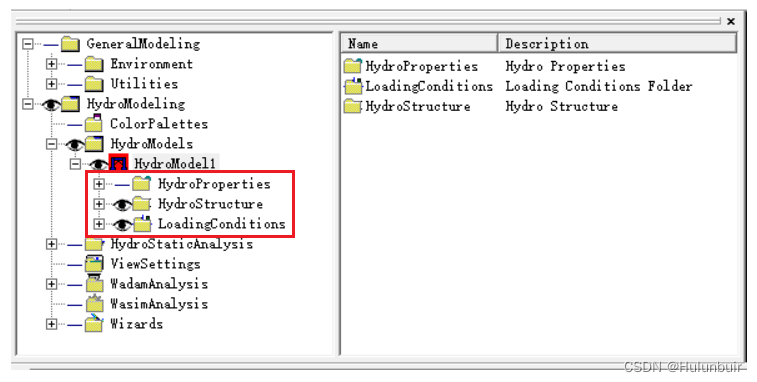
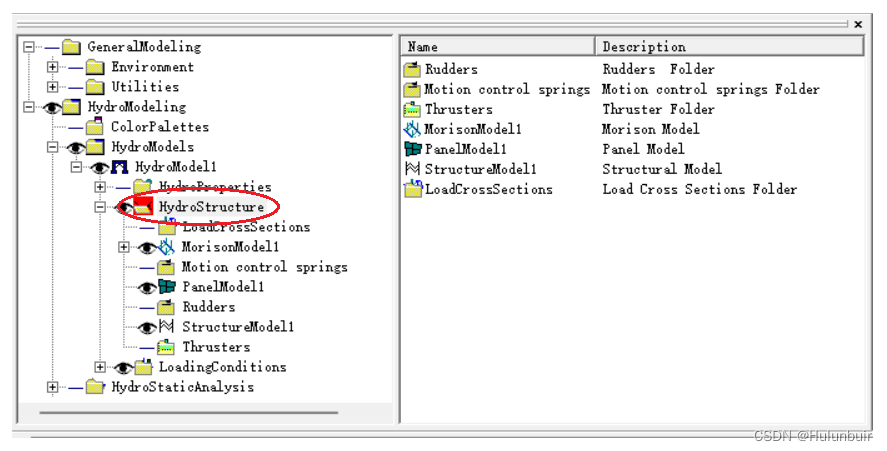
一个水动力模型(如HydroModel1)下面包含三个子文件夹:HydroProperties、HydroStructure 和 LoadingConditions。The hydro properties folder may contain properties for compartments, Morison model, Rudders and thrusters and wind. The hydro structure folder contains all loading condition independent models and element types that may be defined on a hydro model. The Panel Model may be replaced by a Section Model. The loading conditions folder contains all data related to different draughts of the hydro model.
二、Hydro Properties
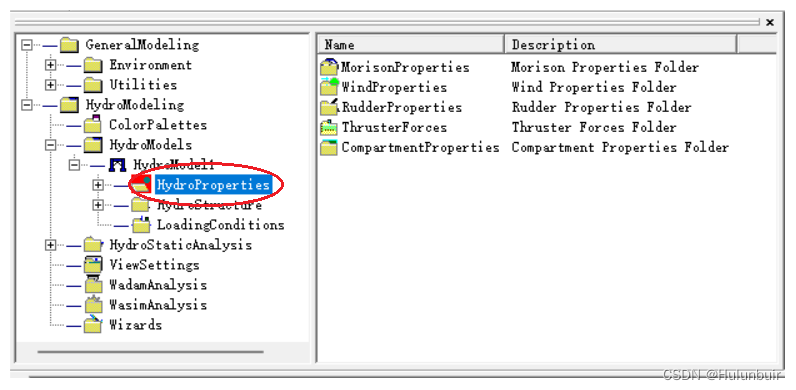
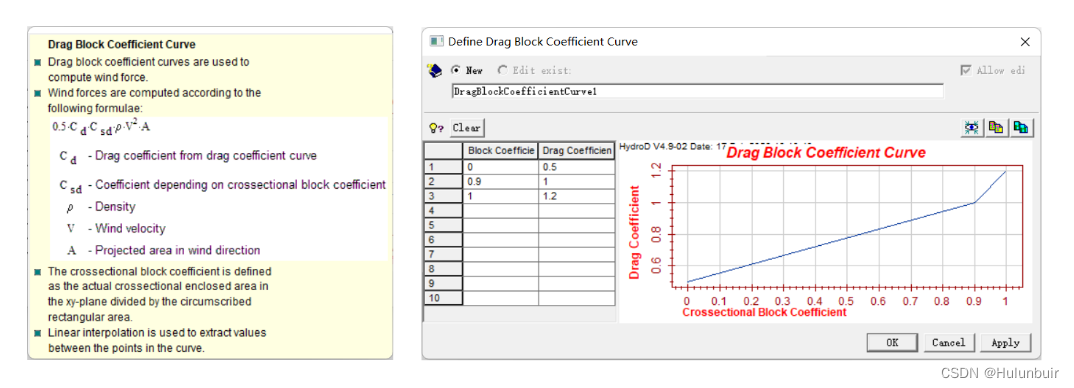
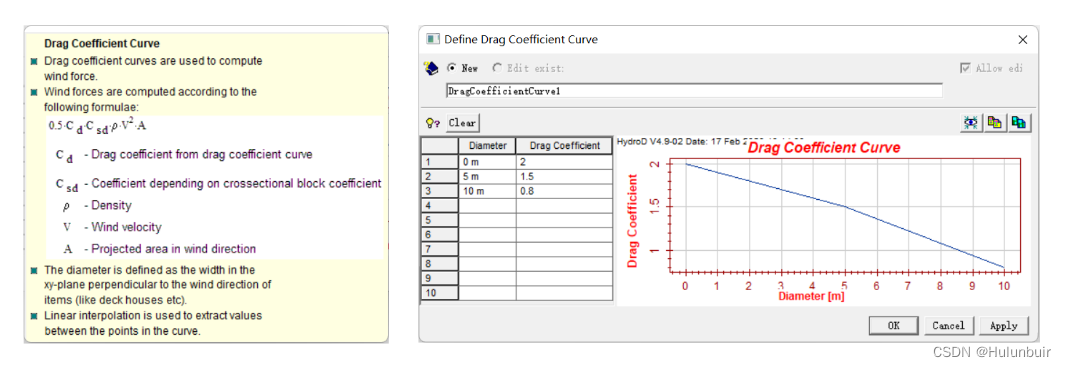
HydroProperties 文件夹下可以定义五大类水动力属性,分别是 Compartments(压载)、Morison Model、Rudders、Thrusters(作动器)和 Wind。在 Wasim 分析中,Rudders 用于运动控制,Rudders 的属性定义在 RudderProperties 文件夹内。Thrusters 可以用在稳性分析中,为浮体提供主动作用力。分布在结构表面上的风压力是不均匀的,除了风速,还与结构的体型有关。 Wind 属性用来计算风倾力矩。
The rudder properties folder contains properties for rudders. Rudders can be used for motion control in a Wasim analysis. The autopilot model in Wasim is very simplified and should only be regarded as a numerical tool to control horizontal motions. Thus the rudders defined here do not necessarily have to reflect the actual physical rudder on the vessel. Different types of thrusters with different force characteristics can be defined. Thrusters can be used in stability analyses. The wind properties are used in the computation of wind heeling moment. This is based on drag coefficients and drag block coefficients.
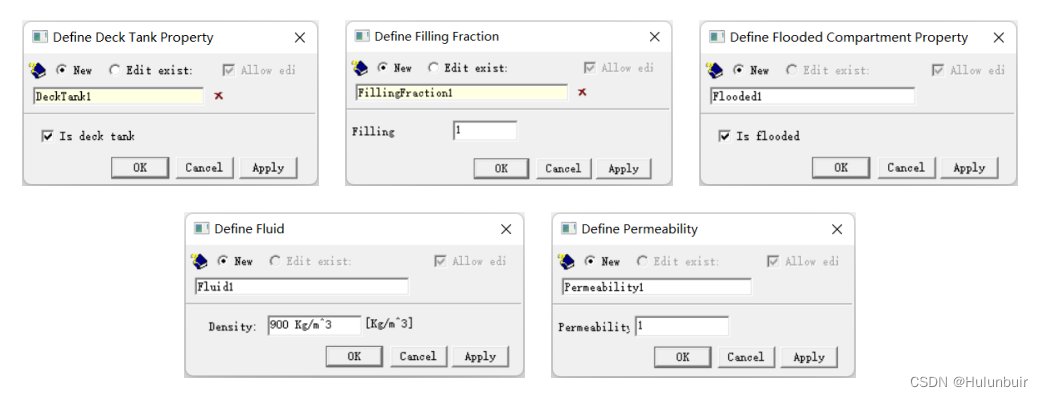
2.1 Compartment Properties
| 编号 | 名称 | 功能 |
|---|---|---|
| 01 | DeckTanks | Deck tanks are only used in connection with the NMD stability code check. |
| 02 | FillingFractions | A Filling Fraction property is defined for each different filling ratio of a compartment. |
| 03 | FloodedTanks | Compartments may be defined as flooded. If so, the internal free surface level will coincide with the external free surface level. |
| 04 | Fluids | The fluid density is given as a property to be assigned to compartment contents. |
| 05 | Permeabilities | The permeability describes the fraction of the compartment volume that can be filled with fluid. |
2.2 Rudder and Thruster
2.3 Wind Properties
三、Hydro Structure
通常,进行水动力分析的各类实体对象是在 HydroStructure 下创建或导入的。这些实体对象可能是:有限元模型(.FEM)、主动或被动控制装置、荷载汇集平面(Load Cross Sections)。有限元模型主要有:Panel Model、Morison Model 和 Structure Model;控制装置包括:Rudders(位移控制装置)、Thrusters(力控制装置/主动控制)和 Motion Control Springs(运动控制弹簧)。
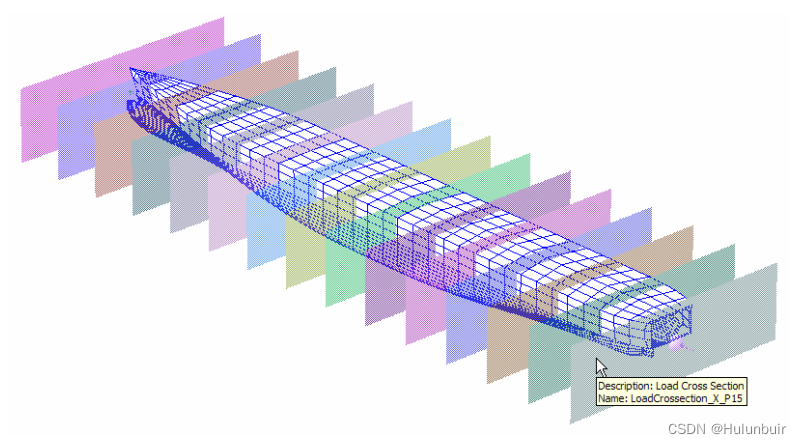
3.1 Load Cross Sections
在 HydroD 中,荷载汇集面(Load Cross Section)是一个与坐标面相平行的平面,由点和坐标面定义,主要用于截面内力的计算。作用在这个截面上的荷载(内力)是通过汇集外载与质量力得到的,力矩相对于用户输入点给出。
四、Loading Conditions
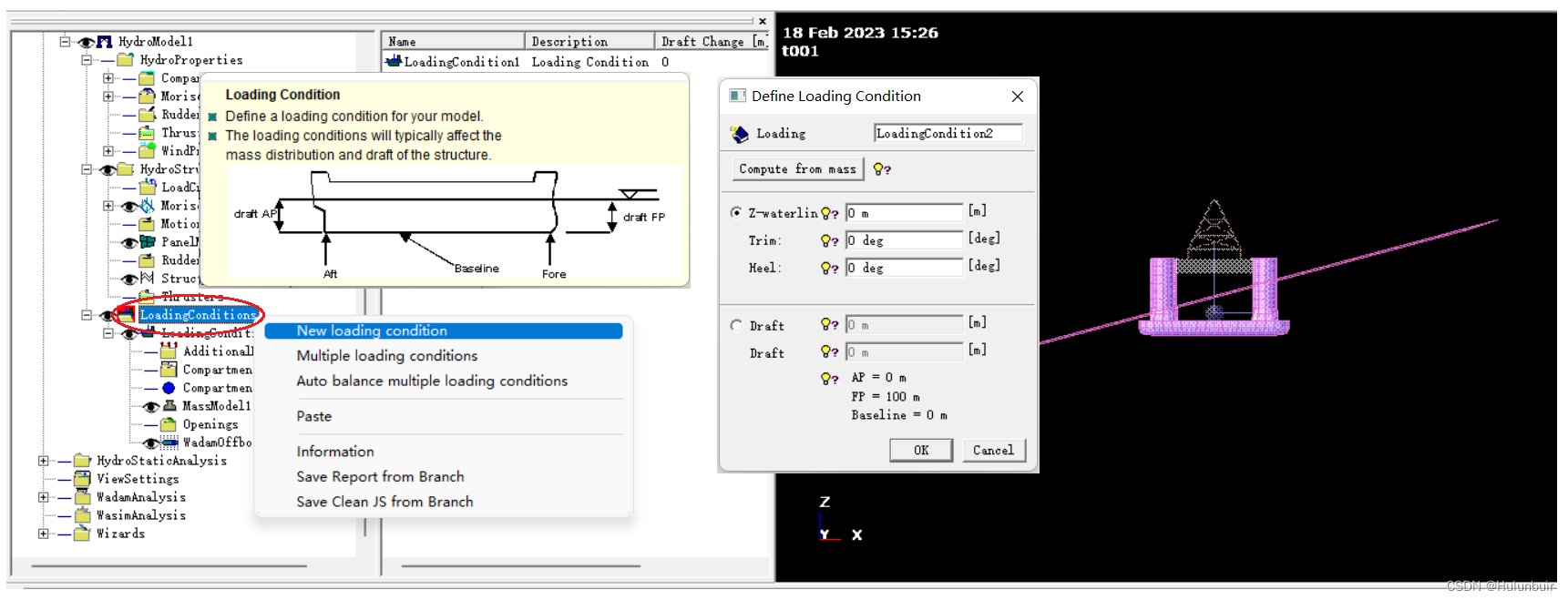
加载条件(loading conditions)文件夹包含了水动力模型不同吃水深度下的所有数据,加载条件将影响模型的质量分布和吃水深度。通常,一个加载条件是由水线的 Z 坐标、纵倾角(Trim)与横倾角(Heel)定义的,决定模型吃水深度的各种数据都在加载条件下创建。Trim and heel angles are Euler angles performed in the order RX-RY-RZ (i.e. heel before trim) for the input to global transformation. Rotations are done prior to translating the model a magnitude minus “Z-waterline” in the z-direction.
4.1 Mass Model
质量模型(Mass Model)有四种定义方式:(1)来自质量模型文件(.FEM);(2)用户自定义质量参数;(3) 6 x 6 质量矩阵;(4)由 Morison Model 给出的质量。当采用用户自定义方式定义质量模型时,需要指定定义用户质量的坐标系。坐标系的类型可能是:Input Coordinate System、Global Coordinate System、Mixed Coordinate System、COG (Center of gravity) Centered Coordinate System。

| 编号 | 类型 | 说明 |
|---|---|---|
| 01 | Input Coordinate System | Coordinate system in which all input is defined and vizualized. |
| 02 | Global Coordinate System | Coordinate system of your model after it has been transformed according to the loading condition trim, heel and draft. |
| 03 | Mixed Coordinate System | Center of gravity is specified in input coordinate system. Radius of gyration and product of inertia are specified in global coordinate system. |
| 04 | COG Centered Coordinate | Center of gravity is specified in the input coordinate system. Radius of gyration and products of inertia are specified in a coordinate system parallel with the input system but with its origin in center of gravity. |
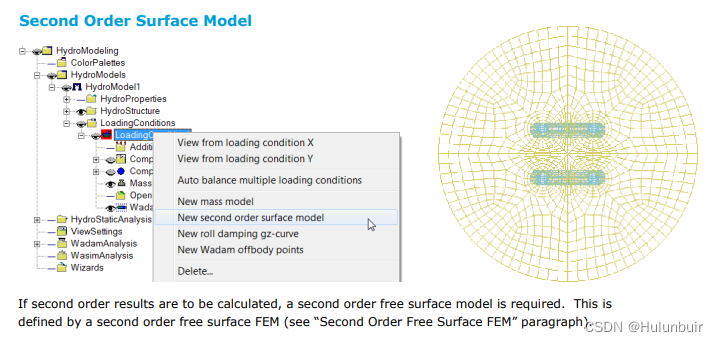
4.2 Second Order Surface Model
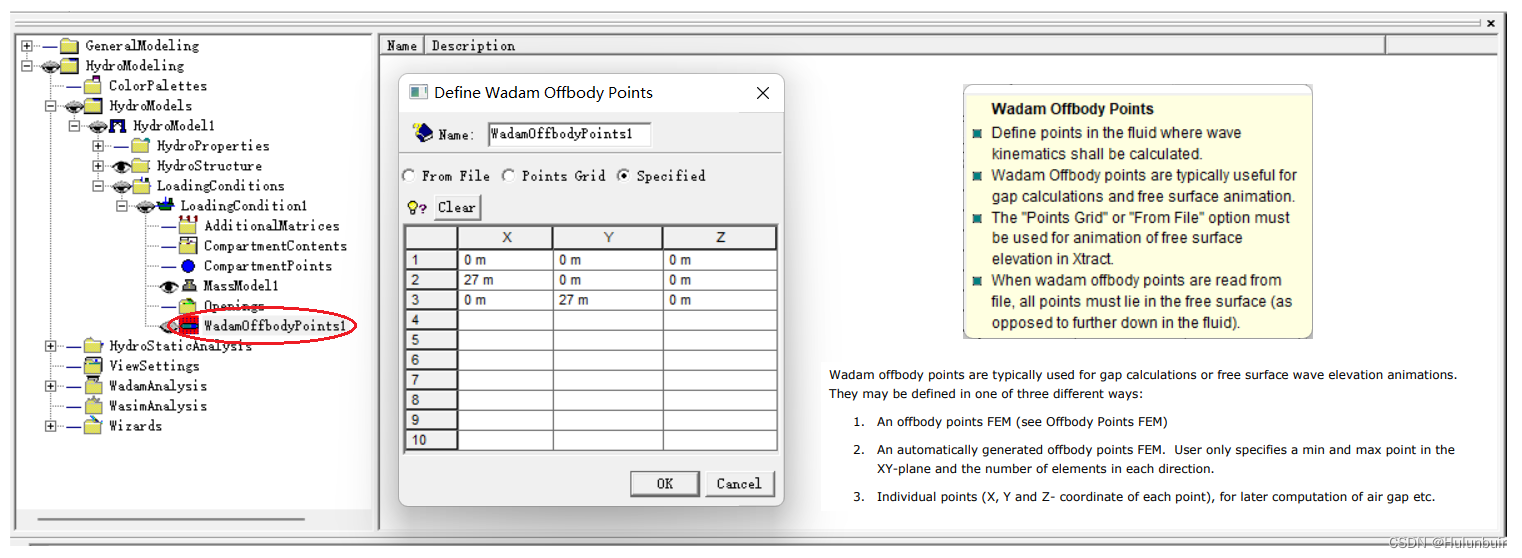
4.3 Wadam Offbody Points
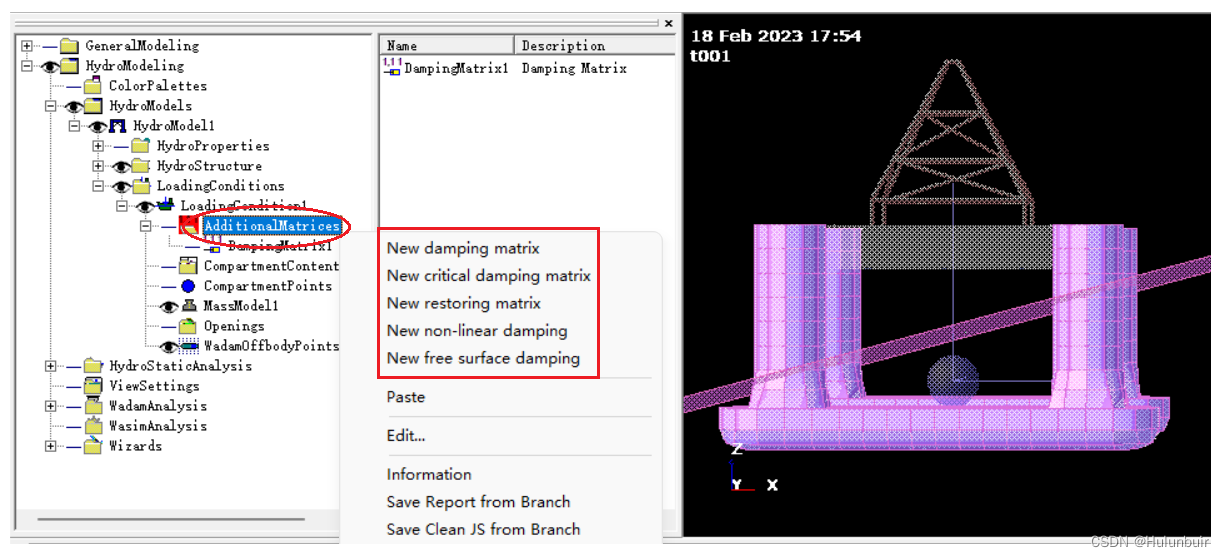
4.4 Additional Matrices
五、参考文献
[1]. HydroD User Manual.
[2]. HydroD/Tutorials Stability analysis and code checking.
[3]. HydroD/Tutorials Wadam, Wasim and Meshing tools.
[4]. 关于风机 叶片/荷载/控制 方面的介绍请访问:https://www.zhihu.com/column/c_1485646874003058688
[5]. 关于风机 有限元分析 方面的介绍请访问:https://blog.csdn.net/shengyutou
[6]. 联系作者 ,Email: liyang@alu.hit.edu.cn
[7]. 联系作者 ,WeChat/Weixin: 761358045






![[安装之3] 笔记本加装固态和内存条教程(超详细)](https://img-blog.csdnimg.cn/img_convert/a859b9e622cc4493a4ef4e15545b9d22.png)