SARScape中用sentinel-1数据做SBAS-InSAR完整流程
- 1 SABA-InSAR原理简述
- 2 数据采集和预设
- 2.1 SAR数据采集
- 2.2 DEM数据下载与放置
- 2.3 精密轨道数据下载与放置
- 2.4 制作研究区范围矢量
- 2.5 SARscape Preferences预设
- 3 SAR数据预处理
- 3.1 导入数据
- 3.2 optional files设置
- 3.3 参数设置
- 4 生成连接图Connection Graph
- 4.1 输入数据
- 4.2 optional files设置
- 4.3 参数设置
- 4.4 查看输出文件和连接图
- 5 干涉工作流Interferometric Process
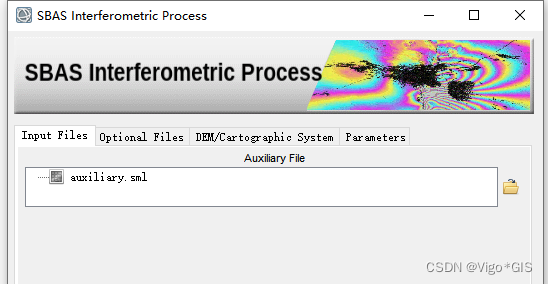
- 5.1 Input Files中选择上一步得到的工程文件auxiliary.sml
- 5.2 制作参考DEM
- 5.3 optional files设置
- 5.3.1 Geometry GCP file ,控制点文件,可选
- 5.3.2 Avoid Moving Area File ,无位移区域,可选
- 5.3.3 Optional Water Vapour File List,水蒸气数据,可用GACOS数据,可选
- 5.3.4 Classification Mask File,分类掩膜文件
- 5.4 parameters设置
- 5.5 输出文件
- 6 连接图编辑SBAS Edit Connection Graph
- 6.1 打开auxiliary.sml文件,会自动加载连接图,自动选择主影像
- 6.2 连接图编辑的参数说明
- 6.3 连接图编辑操作
- 6' 轨道精炼和重去平,SARscape562集成在干涉数据流中,560及以下版本在SABS工具路径中
1 SABA-InSAR原理简述
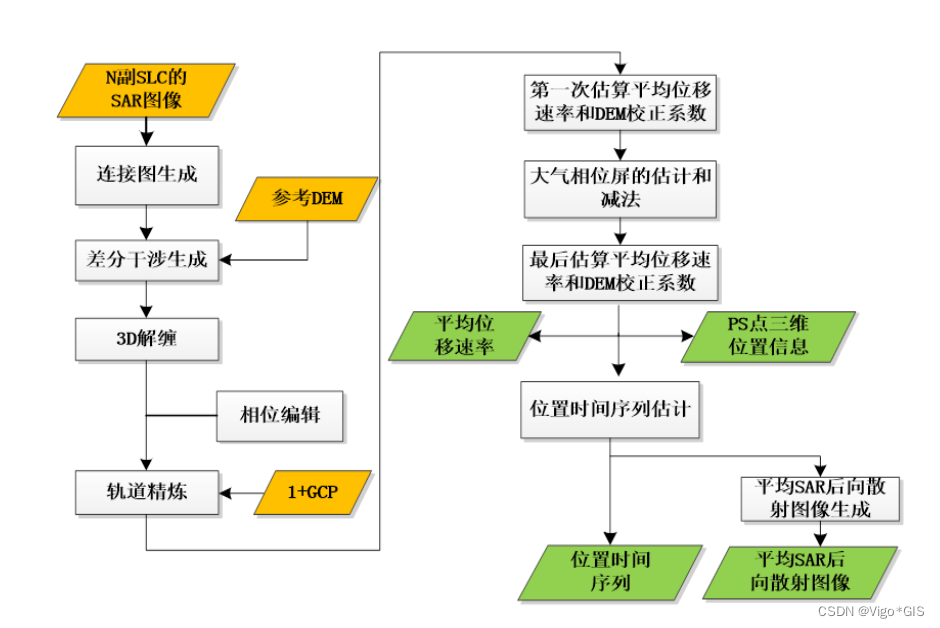
**差分干涉测量短基线集时序分析技术(SmallBaselineSubsetInSAR,SBAS-InSAR)**由Berardino等人于2002年提出,不同于PS - InSAR的单主影像,该方法是一种基于多主影像的InSAR时间序列方法。它通过短基线原则,将大量SAR数据组合为具有多个主影像的干涉子集,每个子集内的干涉对基线长度均低于临界基线值,时间基线也尽可能短,集合间的 SAR影像基线距大,通过这种方式克服了时间和空间上的失相关,因此SBAS - InSAR可以通过较少的数据量来获取较可靠的监测结果。
基于短基线集原则,SBAS - InSAR具有多个主影像,但仍需选取其中一景影像作为公共主影像进行配准;组成各干涉子集后,利用外部参考数字高程模型(Digital Elevation Model,DEM)数据模拟并去除每个干涉相对的地形相位,然后生成时间序列差分干涉图集;相位解缠后得到每个相干目标的相位信息,包括形变相位、大气延迟相位、轨道误差相位等信息,各误差相位可在时间序列上采用滤波方法或多项式模型予以去除;由于SBAS - InSAR具有多个主影像,各干涉子集在联合求解时容易出现方程秩亏现象,因此引入奇异值分解方法,利用最小二乘原理得到地表时间序列形变信息。
下图为SBAS-InSAR的技术路线,图源ESRI的ENVI SARscape教程
2 数据采集和预设
实验所用的软件版本为SARScape5.6.2教育版
实验所用到的数据如下:
- SAR数据,即sentinel-1的SLC数据
- 对应的轨道数据
- DEM数据
2.1 SAR数据采集
目前免费的,还在更新的,比较容易下载的SAR数据就是sentinel-1数据,sentinel-1本来有2颗星,但是1B出故障,停止运行了,以前也有很多SAR卫星,比如ASAR
有很多个网站可以下载Sentinel-1数据,本文以ASF网站为例,下载教程参考文章:
哨兵-1 Sentinel-1数据下载(ASF)
也可以在欧空局下载Sentinel-1数据
哨兵-2 Sentinel-2 数据下载(欧空局)
2.2 DEM数据下载与放置
做DInSAR有多个方法,本文使用是两期SAR数据+DEM,因此要事先准备DEM数据,通常使用SRTM数据,具体来说是SRTM-1 V3,分辨率30m。
虽然SARscape理论上可以自动下载DEM,但是国内的网络经常出故障,因此还是需要手动下载。
如果不知道SAR数据对应的DEM怎么下载,不知道DEM的位置是哪里,不知道DEM切片编号,可以参考文章:
SARscape手动下载30mDEM(SRTM1 V3)切片数据-[EC: 40008]
2.3 精密轨道数据下载与放置
精密轨道数据不是必须的,一般来说,SAR数据自带参考轨道数据,但是精度稍低,精密轨道一般在数据发布后的一个礼拜后才会公布,因此,在处理突发情况的SAR数据时,短时间内无法获取到相应的精密轨道数据。
精密轨道下载教程见:
3种方法下载Sentinel-1精密轨道数据
精密轨道需要放置在特定的文件夹路径下面才能被SARscape识别并使用,放置教程见:
SARscape存放sentinel-1精密轨道数据并自动读取
2.4 制作研究区范围矢量
一景SAR数据很大,如果电脑性能不足,处理起来需要很多时间,为了提高处理速度和效率,建议提前制作研究区范围矢量,在SARscape中,可以导入.shp .kml .kmz格式的矢量作为处理范围。
直接在GIS软件中新建一个矢量面图层,然后画一个即可,或者在Google Earth里面圈一个kml也可以,这一步很简单,就不
这个不是必须的,如果不导入范围,那么默认处理整个数据。
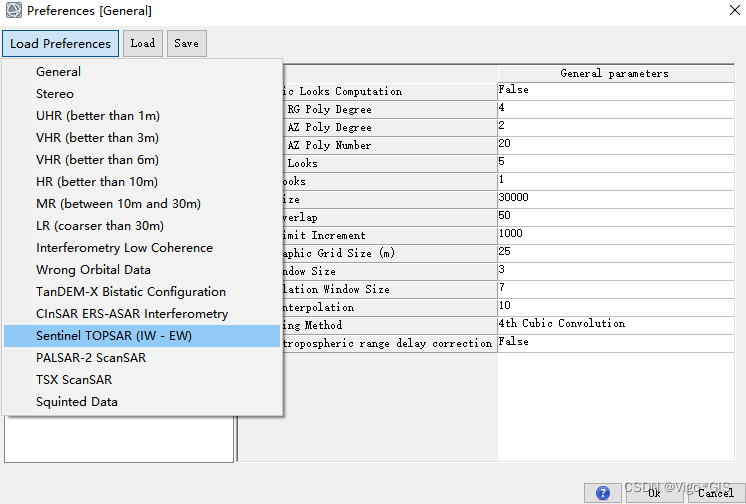
2.5 SARscape Preferences预设
首先选择适用于 Sentinel-1的一套系统参数。打开SARscape----Preferences----Perference specific,单 击 Load Preferences,选择Sentinel TOPSAR,在弹出的对话框上选择“是”。在参数设置面板上点击 OK。
3 SAR数据预处理
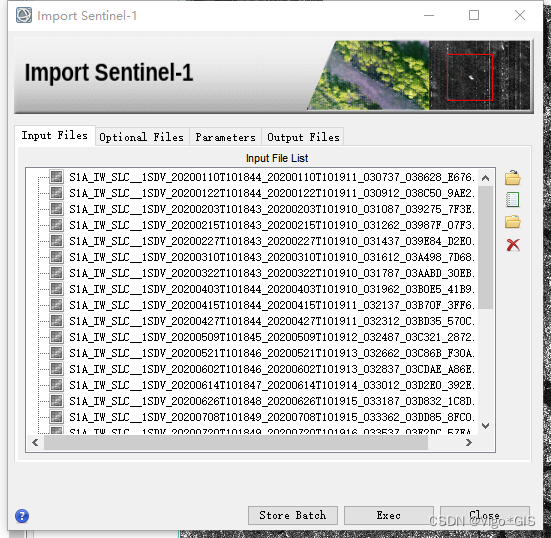
3.1 导入数据
工具路径为:/SARscape/Import Data/SAR Spaceborne/Single Sensor/Sentinel-1
由于是SARScape562,直接导入zip压缩包即可,不用解压
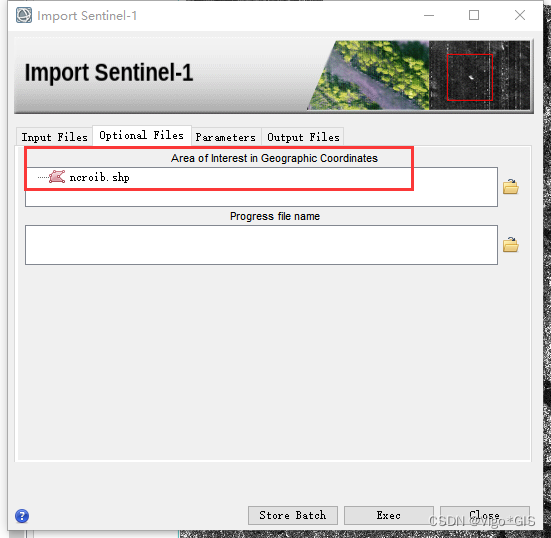
3.2 optional files设置
这一步就是添加
- 兴趣区矢量文件,kml、kmz或者shp格式都行,作者亲测矢量名必须是英文且不可以有下划线!!可选,不选择矢量文件就直接处理整景的数据
- 和处理过程文件
_progress.txt,可选
3.3 参数设置
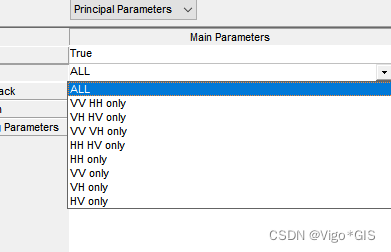
极化方式这里可以选择你需要的,一般是用VV
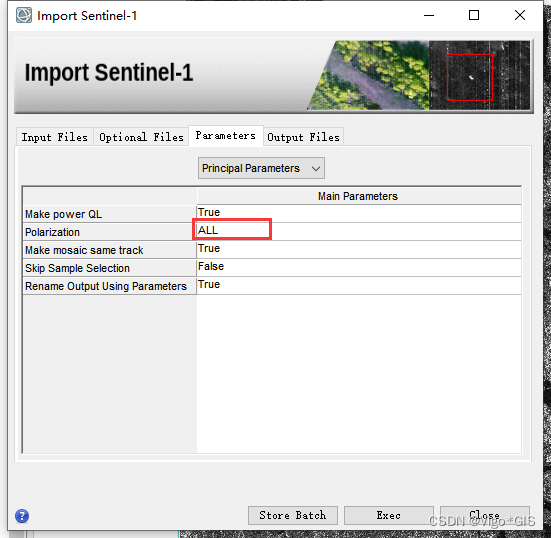
输出的时候直接选择文件夹就行
查看输出的文件
如果最后提示complete的同时又有一个警告,内容是无法找到有效的轨道数据,但其实你已经将轨道数据存放在合适的位置了,那可能是软件的bug,我遇到过很多次。在无法连接到指定的下载轨道数据的网址的时候,我们就不得不忽略轨道数据了。
No valid orbit file found in repository https ://scihub.copernicus.eu/gnss/
Please see the help page of "Sentinel Auxiliary Files Download" for more details !
4 生成连接图Connection Graph
其实从这一步开始才是真正的SBAS-InSAR核心流程
对输入的数据进行干涉像对的配对,像对结果图表方式输出到屏幕,输入 N 景数据,能得到的最大配对数是(N*(N-1))/2,生成连接图工具会选择最优的组合方式进行配对。这些像对会进行干涉工作流处理,然后用于 SBAS 反演。
程序会自动选择超级主影像,在整个处理中,超级主影像作为参考影像,所有的像对都会配准到超级主影像上。用户也可以自己选择超级主影像,超级主影像的选择也不是很严格因为对结果不会有什么影响,不过可能会导致较少的配对,所以还是建议自动选择超级主影响,这样有足够的像对,在像对编辑的时候,就可以去掉相干性小的像对。
工具路径:/SARscape/Interferometric Stacking/SBAS/1 - Connection Graph
4.1 输入数据
选择上一步处理好的VV数据

4.2 optional files设置
选择超级主影像super master file,这里不选择,程序会自动判断最适合的影像
4.3 参数设置
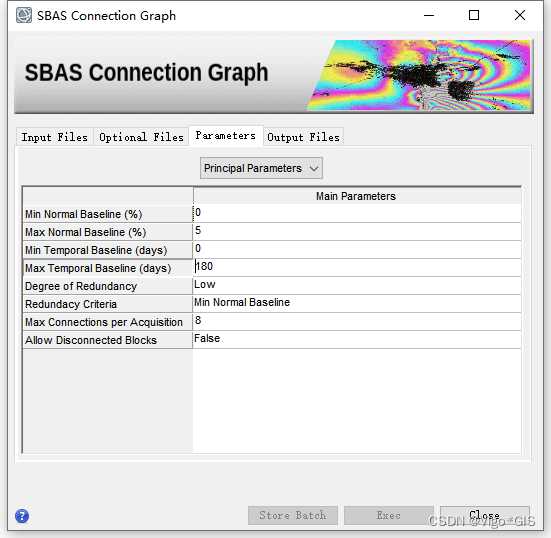
单击 Parameters 面板,选择 Principal Parameters,设置以下参数:
- Min Normal Baseline (%):0,临界基线最小百分比。
- Max Normal Baseline (%):2,临界基线最大百分比。
提示:建议把空间和时间基线阈值调大一些,最大临界基线推荐值为 45%~50%,主要依
赖传感器类型和经验,目的是避免完全空间失相关。 - Min Temporal Baseline:0,最小时间基线。
- Max Temporal Baseline:180,最大时间基线。
- Degree of Redundancy:冗余度
在对连接(干涉图)选择的最小和最大时间基线和正常基线应用阈值后,可以指定进一步的冗余度选择标准:- 高,接受与先前基线阈值相关的所有干涉图。
- 低,程序根据图形冗余标准和每次采集的最小连接数,尽量减少保留的干涉图数量
- Redundacy Criteria:冗余标准
当冗余度较低时,预计以下选择标准用于删除冗余连接:- 最小正常基线,通过仅保留具有最小空间基线的连接,将连接数最小化。
- 最大正常基线,通过仅保留具有最大空间基线的连接,将连接数最小化。
- 最小时间基线,通过仅保留具有最小时间基线的连接,将连接数最小化。
- Max Connections per Acquisition:最大连接数,撇除后每个采集剩余的连接数(干涉图),以减少冗余。此参数表示连接图的平均冗余,参考文献建议设置大于5的值以获得可靠的反演解。
- Allow Disconnected Blocks:False。不允许孤立的像对连接。
输出面板
填写一个文件的根名,后续处理的数据会据此根名自动命名
选择输出路径即可
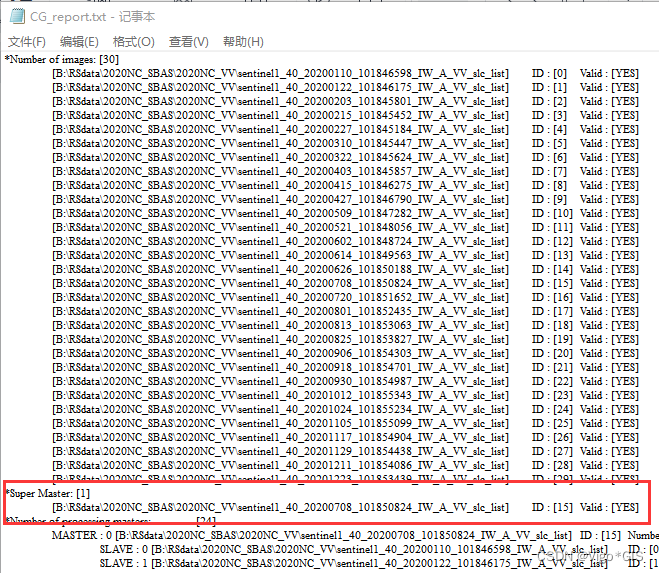
查看报告
4.4 查看输出文件和连接图
-
在输出目录中可以看到如下的文件,重点看connection_graphy里面的plot和report
-
auxiliary.sml文件记录相关的处理信息,包括处理进度、步骤和生成的文件记录等,后面会用到
-
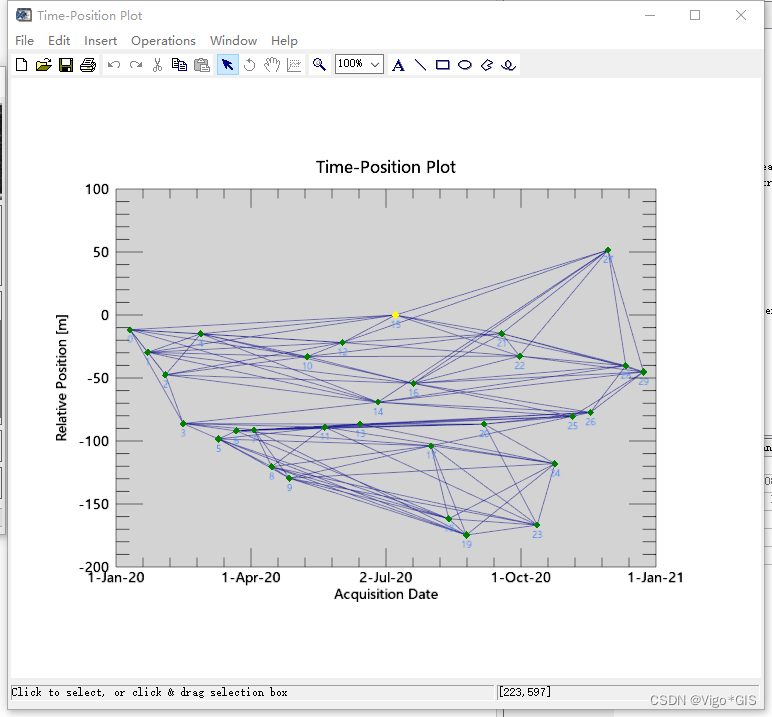
连接图中,黄点是超级主影像super master ,这个在报告中也能看到,打开CG_report.txt文件,可以看到super master的信息。绿点是从影像,如果有红点,就是在限制条件外的影像。
-
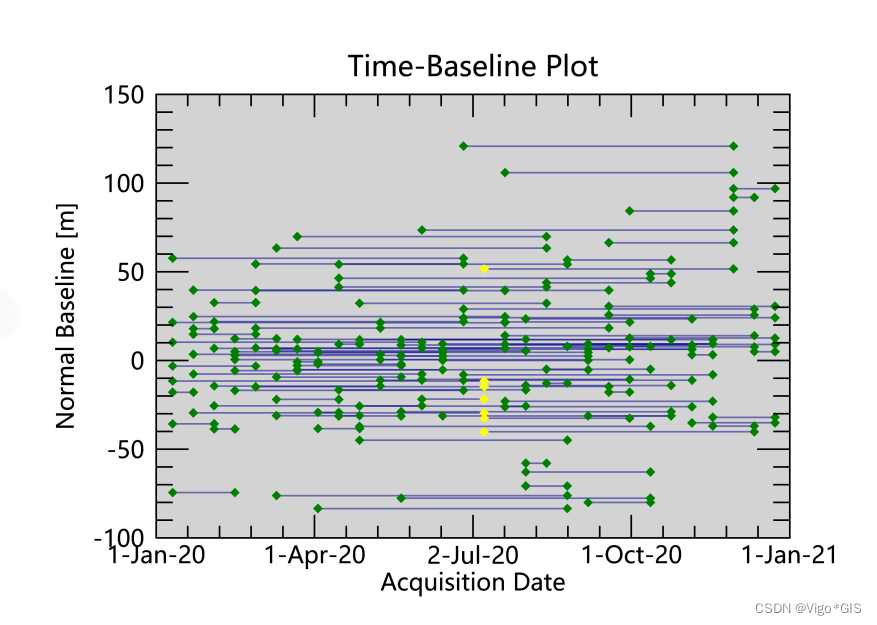
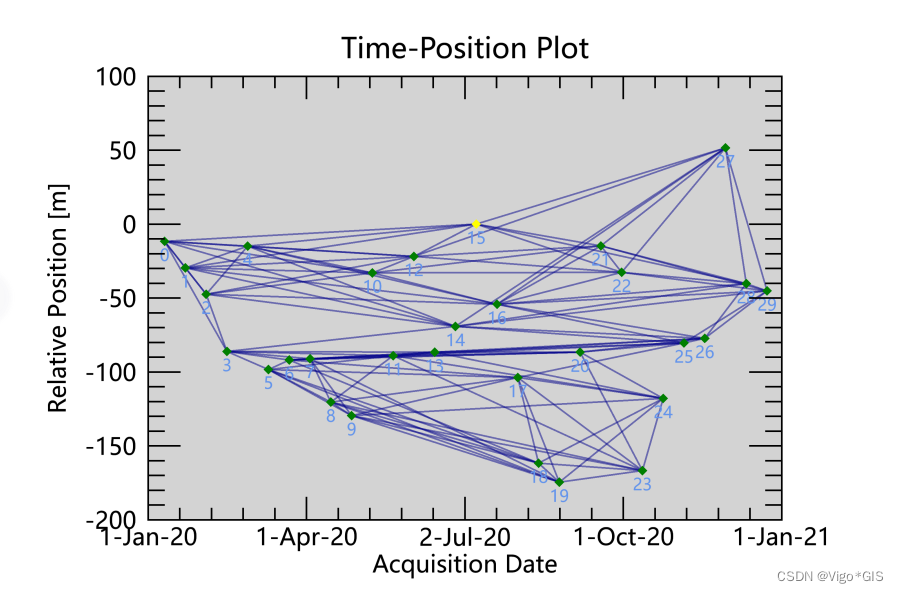
像对连接时间基线图
-
像对连接空间基线图
5 干涉工作流Interferometric Process
SARscape562版本的干涉工作流里面可以自动进行轨道精炼和重去平,这一步有点复杂,处理时间也比较久
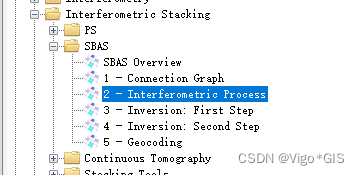
- 工具路径:
/SARscape/Interferometric Stacking/SBAS/2 - Interferometric Process
5.1 Input Files中选择上一步得到的工程文件auxiliary.sml
对所有的配对的干涉像对进行干涉处理,从相干性生成,去平、滤波和相位解缠,所有的数据对都配准到超级主影像上,为下一步轨道精炼和重去平,以及 SBAS 反演做好数据准备。包括:
- 干涉图生成 Interferogram Generation
- 干涉图去平 Interferogram Flattening
- 自适应滤波和相干系数生成 Adaptive Filter and Coherence Generation
- 相位解缠 Phase Unwrapping
生成一系列解缠之后的相位图。所有的干涉图最终都与超级主影像进行了配准,为下一
步轨道精炼、重去平以及 SBAS 的反演做准备。
5.2 制作参考DEM
为啥要提前制作DEM呢?因为之前的步骤都不需要用到DEM,但是optional files里面的GCP需要DEM
-
在工具的DEM/Cartographic System中,点击DEM file 右边的望远镜符号
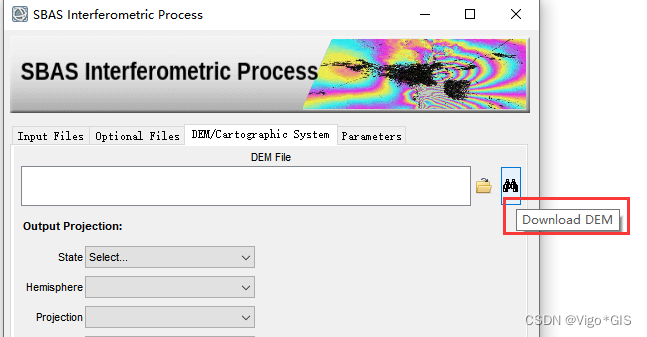
-
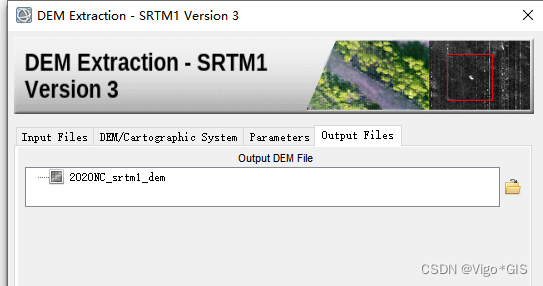
选择SRTM-1,会跳出一个新的工具DEM Erxtraction-SRTM1 Version3,

-
输入位置参考数据,也就是上一步处理好的数据,随便选一个就行,我选的是超级主影像

-
选择输出文件的坐标GEO-GLOBAL
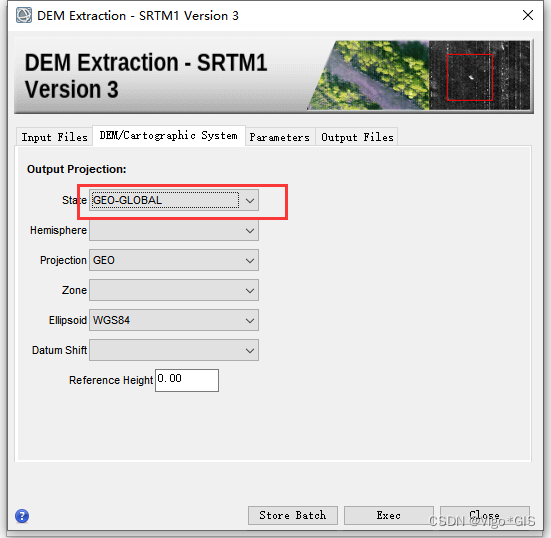
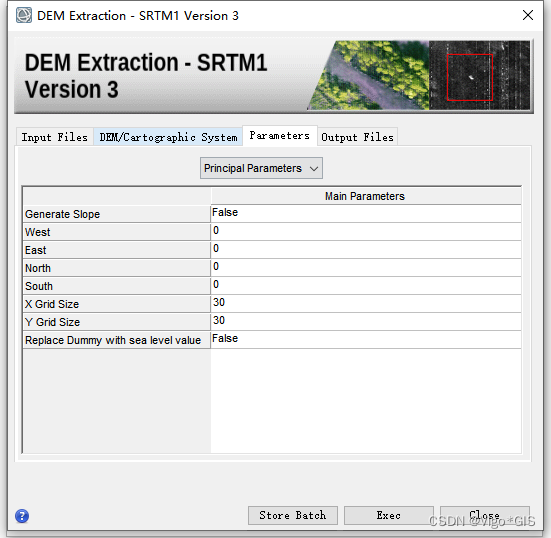
-
设定好输出路径之后就点击exec开始运行
-
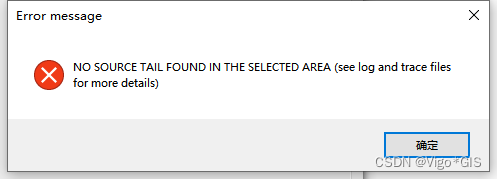
日常报错
其实这一步的过程和前文提到的文章里面一模一样
SARscape手动下载30mDEM(SRTM1 V3)切片数据-[EC: 40008] -
打开
SARscape----Administration----View Files----Log File
拉到最下面,查看DEM切片的名称
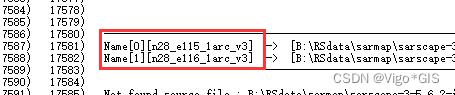
-
去USGS下载这两个切片,不再赘述,看链接里面的文章即可
SARscape手动下载30mDEM(SRTM1 V3)切片数据-[EC: 40008] -
制作好了之后点击文件夹图标直接加载进来
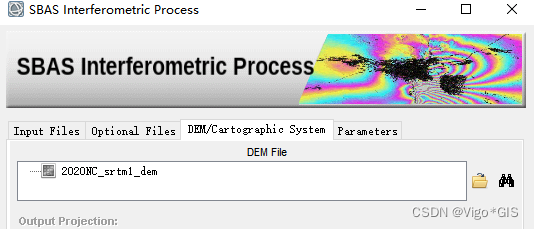
5.3 optional files设置
5.3.1 Geometry GCP file ,控制点文件,可选
加载先前创建的地面控制点文件(.xml)(加载 GCP 文件)或自动加载创建新地面控制点文件的界面(创建 GCP 文件)
-
点击望远镜,创建GCP

-
点击之后,会自动打开Generate Ground Control Points界面
- Input File:必选项。用于 GCP 定位。这里选择上一步做好的解缠结果文件或者干涉文件。
- DEM File:可选项。用于检测 GCP 对应的高程值。这里选择 DEM 文件。
- Reference File:可选项。为选择 GCP 提供一个参考依据,可以选择相干系数图、干涉图等。Reference File 与 Input File 同时显示在一个窗口中。

-
点击Next,进入下一步,Insert指插入GCP,Edit/Modify可以删除或者移动GCP
说明:选择 GCP 重要的标准包括:
1、没有残余地形条纹;
2、没有形变条纹,远离形变区域,除非已知这个点的形变速率;
3、没有相位跃变,如果 GCP 点位于一个孤立相位上,并且解缠的值非常差,这个位置可能是斜坡相位(phase ramp)的一部分,那么选择的这个 GCP 是不对的;
4、由于在 SBAS 中,很难找到完美的 GCP 可以全部用在所有的数据对中,因为数据对拥有不同的相干性。因此建议多选择一些 GCP,至少 20-30 个点。

-参考着cc影像插入GCP完成之后,在fint里面看看有无位于相位孤岛的地方,如果有就删掉或移动
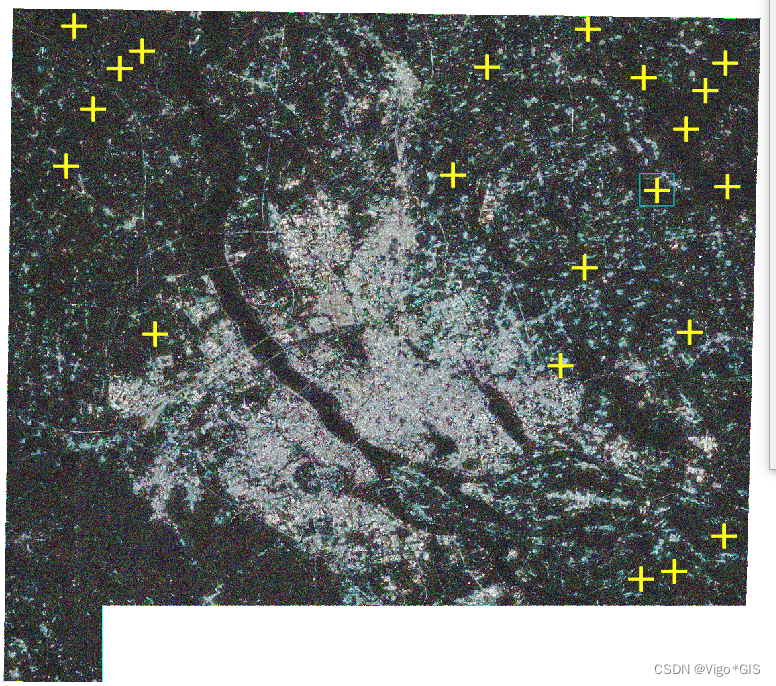
-
这种点就应该删掉或者移动,点击GCPs下面的黑色X就是删除选中的GCP点,如果点击四个红色X就是删除所有的GCP点


-
编辑完之后点击在Cartographic System界面选择坐标系,在export界面选择数据出路径,最后点击finsh

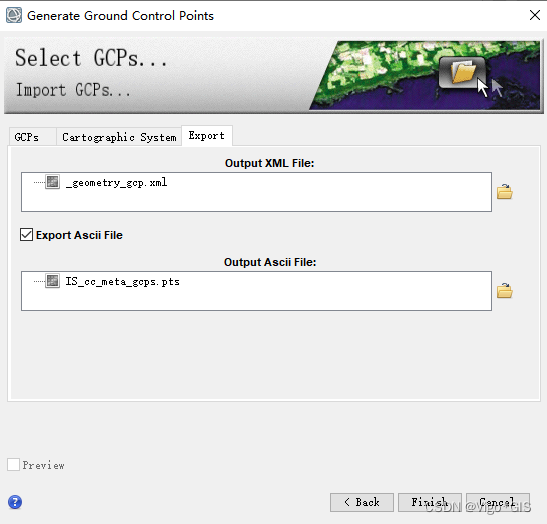
我这一步的GCP在导出的时候一直失败,输出文件夹里面没有GCP.xml文件,不知道是版本的原因还是因为SARScape562版本的SBAS Interferometric Process可以自动进行轨道精炼和重去平,所以做不了GCP,但我更觉得是软件的bug 😦 -
所以后面的我也不知是如何操作的,不过先不管这个GCP吧
5.3.2 Avoid Moving Area File ,无位移区域,可选
- 如果已知受位移影响的区域,建议创建包含移动区域的 shapefile (.shp),必须对此 shapefile 进行地理编码(使用与参考 DEM 相同的 carto 系统)。在光谱分集估计阶段,将避免与此形状文件相交的所有扫描SAR或TOPSAR突发(否则,在地震等强烈运动的情况下,这些脉冲将被破坏)。此外,后续的自动细化步骤还将考虑此形状,以避免在细化掩膜中使用移动区域上的像素。
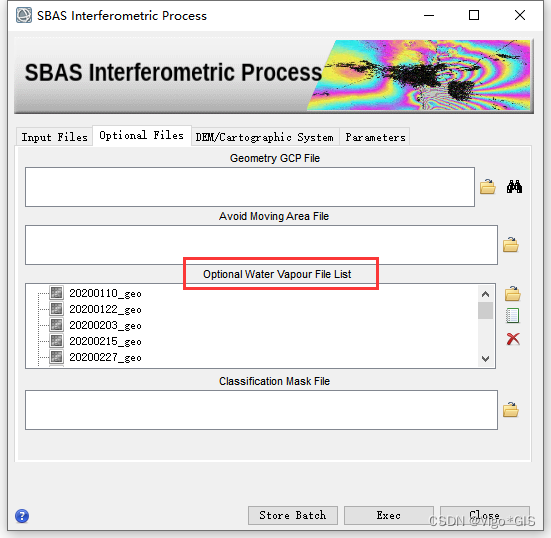
5.3.3 Optional Water Vapour File List,水蒸气数据,可用GACOS数据,可选
- 包含 GACOS 产品水蒸气数据的文件列表(_filename_list.txt; _bil)。初始化并编译列表后,软件将从干涉图中删除水蒸气成分(_clean_fint)。必须为每个输入影像插入 GACOS 栅格(采集日期和时间相同)。联轴器由软件自动制造。有关GACOS数据的下载和使用细节请参考文章:
SARScape使用GACOS数据
5.3.4 Classification Mask File,分类掩膜文件
- 地理编码几何分类地图,用于在 SBAS 处理期间遮盖特定区域。屏蔽区域在整个相干堆栈上的值为零,并且不会被展开考虑,也不会成为最终覆盖图的一部分。“分类掩码 ID 列表”ID 被视为要掩码的区域。
5.4 parameters设置
在 Parameters 面板中,选择 Principal Parameters,设置以下参数:
- Rebuild All:重建所有,如果中断了运算,就重新运算所有的影像,这里选择False
- Range Looks 和 Azimuth Looks:多视视数,分别设置 7 和 2,地面分辨就是接近30m,设置视数太低可以提高地面分辨率,但也会提高运算压力。
- Grid Size for suggested Looks:网格大小(以米为单位)用于调整距离和方位角外观。如果其他参数是手动设置的,栅格大小将不意味着它们的值发生变化。
- Number of Parallel Unwrapping:2 解缠次数,定义将并行执行的解缠次数(每个线程一个干涉图)。此参数不得超过 CPU 线程的总数。在增加并行进程数之前,用户应考虑可用的系统内存,因为内存消耗与并行执行的解包数直接相关。
- Apply Layover and Shadow mask:应用分层和阴影遮罩,遮罩覆盖和阴影区域中的结果。
- Atmosphere External Sensors:大气外部传感器,选择GACOS,有关GACOS数据的使用方法请阅读文章:
- Atmosphere Height Correlation Flag:大气高度相关标志,通过选择此标志,算法使用“高度相关窗口大小[m]”(大气部分)参数定义过滤器的大小,从每个干涉图中估计并移除大气的高度相关分量。这里暂不需要,选择False。
- Coregistration With DEM:True
- Unwrapping Method Type:Minimum Cost Flow 解缠方法,有三种方法供选择
- Unwrapping 3D:False
- Unwrapping Decomposition Level:1,解缠分解等级。
- 分解等级:(Unwrapping Decomposition Level):该分解是为了用迭代的方法对数据做多视和疏采样:干涉图以一个较低的分辨率被解缠然后被重采样成原来的分辨率。使用了分解可减少解缠错误,提高处理效率。用户可以指定迭代的次数,每个迭代相当于3次采样过疏。这里可以填的数有:-1、0、1、2、3。其中,-1和0代表不执行分解,用原始的像素采样,当形变很大或是地形很陡峭的情况下(多相位/高密度分布),分解可引起交迭效应,建议设置为-1或0;1代表最小的分解等级。3:最大的分解等级。建议这个次数不要超过3。通常情况设置原始的像素采样(如-1)或者最小的分解等级(1)。
对大范围分布的低相干性区域,这里设置分解等级为 2,提高解缠的质量及处理效率,减少解缠错误
————————————————
引用声明:该段文字引用自文章:ENVI-IDL技术殿堂,用哨兵1A干涉数据对DInSAR测量台湾地震引起的地表形变信息
- Unwrapping Coherence Threshold:0.2,解缠相关系数阈值。
- Filtering method:Goldstein 滤波方法

- 运行成功
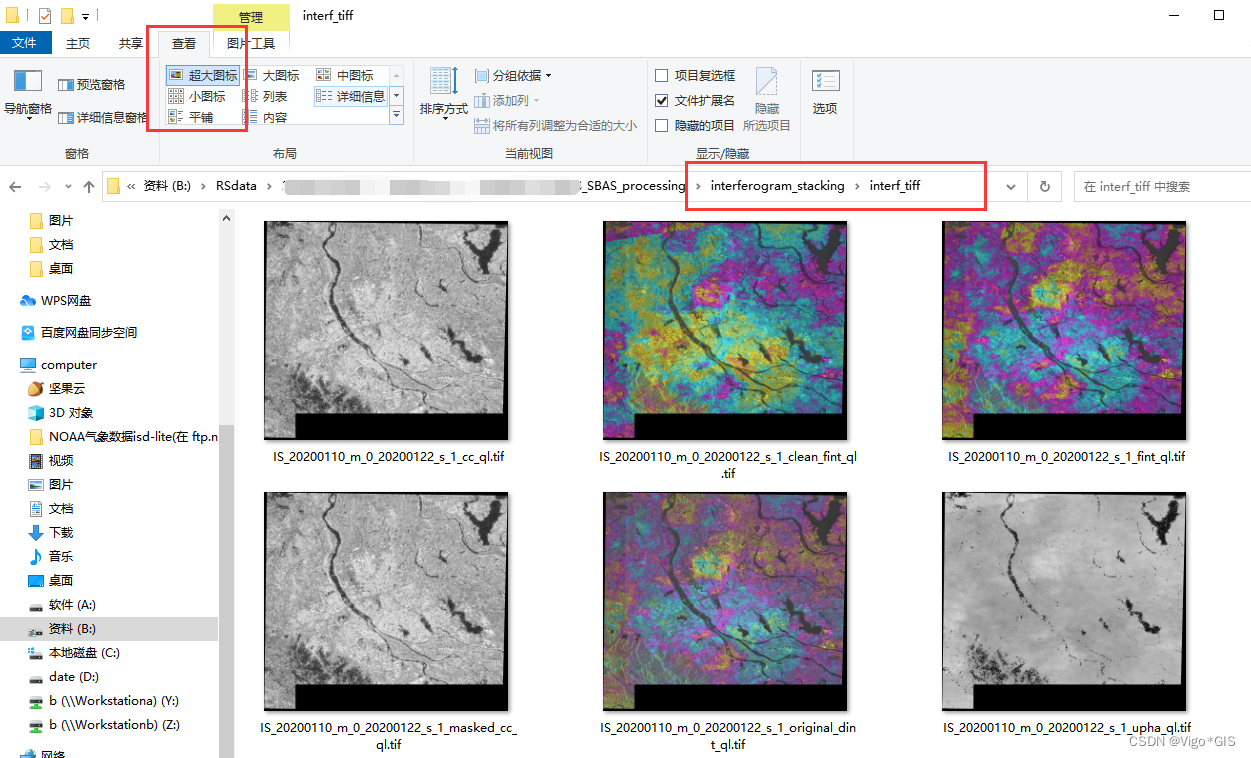
- 这一步是 SBAS 处理中运行时间最长的一步。这一步做完后,会生成一系列结果,包括各个像对去平和滤波后的干涉图(_fint),相干系数图 (_cc) 、解缠结果 (_upha)和斜距下的强度数(_slant_pwr),干涉处理的文件夹在根目录下面( interferogram_stacking),包含一个索引文件(meta file),能打开所有的干涉处理的结果。生成一个 “interf_tiff”的文件夹,包含所有结果的 TIFF 格式结果,存放在 interferogram_stacking 文件夹下面,便于可视化查看。
- 查看解缠结果(IS_upha_list_meta)和相应的相干性图(IS_cc_list_meta),看有无相干性低和解缠结果不好的像对。
说明:这一步之后,检查数据和调整相应的参数可以参考下面几点说明:
- 查看去平和滤波后的干涉图,可以确定对干涉滤波器的调整,如果很多干涉图都是低相干的区域,可以增加滤波强度,如果高相干区域太多,如有大量干的区域存在,可以减小滤波的强度。Goldstein 是推荐的滤波方法。如果要增强滤波效果,
在设置参数的滤波面板下(Adaptive Filter Default Values),增加 alphas values 值和/或窗口大小 (窗口大小和条纹频率有关:密集的条纹应该用较小的窗口)- 查看解缠后的图,可以确定相干性阈值、解缠方法、分解等级等
- 相干性阈值:如果解缠的结果中有很多噪声的话,可以增加相干性阈值,如果解缠结果比较少,可以减少相干性阈值。
- SBAS 推荐的默认解缠方法是 Delaunay MCF (如果选择 3D 解缠方法的话,这个方法是必执行的), 因为这种方法可以很好的处理两个较孤立的相干性高的区域,这对潮湿或植被区域是常见的,在绝大多数情况下都是可行的解缠方法,如果有特殊情况比如存在很大的残余地形或形变,可以尝试经典的 MCF 方法。
- 分解等级:通常执行原始的像素采样(如-1 或者 0)或者最小的分解等级(1),该分解是为了用迭代的方法对数据做多视和疏采样:干涉图以一个较低的分辨率被解缠然后被重采样成原来的分辨率。
- 使用分解可减少解缠错误(对分布的低相干性的区域),提高处理效率。用户可以指定迭代的次数,每个迭代相当于 3 次采样过疏,建议这个次数不要超过 3。当形变很大或是地形很陡峭的情况下(相位变化快/密度大的干涉条纹),分解可引起交迭效应,在这种情况下,设置值为-1,不执行分解。
- 对大范围分布的低相干性区域,这里设置分解等级为 2,提高解缠的质量及处理效率,减少解缠错误。
- 需要注意的是:分解等级设置较大的话,宏观上的效果比较好(如数据处理速度提高),但是会引起局部区域的不连续,等级设置高可能会引起假信号问题,在第一次解缠的时候用这个等级,在第二次解缠的时候就在简化了的去平和滤波后的干涉图(去除了位移速率和地形残差)上进行,这种情况下,推荐设置解缠等级为 2。
————————————————
引用声明:该段文字引用自文档:[ENVI-SARscape入门教程-第8章短基线SBAS]
如果侵权请联系我删除,谢谢!
5.5 输出文件
- 这一步的处理虽然没有标识输出文件目录,但也可以找到,位于
SBAS_processing文件夹中
- interferogram_stacking文件夹
包含以下产品的目录:
-
由于输出产品大量元数据(_meta)。并生成时间序列 (.series).文件,因此能够同时加载所有相关的输出产品:
-
“interf_tiff”子文件夹,其中包含中间干涉测量 SBAS 结果的 tiff 文件。
生成的元数据和时间序列文件:
-
IS_cc_meta,IS_cc.series,指的是所有相干图像。
-
IS_fint_meta,IS_fint.series,指的是所有去平地和滤波的干涉图。
-
IS_clean_fint_meta,IS_clean_fint.series,指的是所有去平地,过滤和合并平滑噪点(由可选过程输出)的干涉图。
-
IS_upha_meta,IS_upha.series,指的是所有相位解缠。请注意,此扩展用于在 SBAS 反演第一步中生成的第 2 级未解缠的产品。
-
IS_pwr_meta,IS_pwr.series,指的是所有斜距影像。
-
IS_ls_mask:斜距影像中的叠掩和阴影(用作永久掩膜)。
-
IS_geo_ls_mask:地理投影影像中的叠掩和阴影掩膜。
-
IS_srlia:斜距影像的局部入射角图。
-
IS_geo_lia:地理投影影像的局部入射角图。
-
IS_cls_mask:斜距影像的分类图(用作特定ID上的永久掩膜)。
-
IS_elevation_mask:斜距影像的高程掩膜(用作用户指定的开始和结束月份之间的间歇性掩膜)。
- work_interferogram_stacking文件夹
用于存储中间处理结果的目录。
- 为了区分每个输出产品的来源输入SAR影像对(以及在连接网络中识别它),将添加一个包含主从采集日期(即yyyymmdd)和主从关系的前缀。
6 连接图编辑SBAS Edit Connection Graph
- 依次查看上一步生成的各个像对的相干性图(_cc)和解缠结果图(upha),若有相干性低的,就用连接图编辑工具对该像对移除。
- 可以直接查看…\interferogram_stacking\ interf_tiff 中的 Tiff 格式文件。或者在 ENVI 中打开解缠结果(IS_upha_meta)、相干性图(IS_cc_meta)、滤波后干涉图(IS_fint_meta),在 ENVI 中浏览这些结果。
- 由于每个人的经验不一样,判断需要移除的数据对也会不一样。这里总结一下需要剔
除的像对的常用标准:
1.如果干涉处理时候用了 3D 解缠的方法,建议保留(得到的结果含有 3D_del_upha 结果的说明进行的是 3D 解缠);
2.相干系数图、滤波后的干涉图、相位解缠图,只要其中一个结果较好,建议保留;
3.得到的结果含有明显的大气相位,建议剔除;
工具路径:/SARscape/Interferometric Stacking/Stacking Tools/SBAS Edit Connection Graph
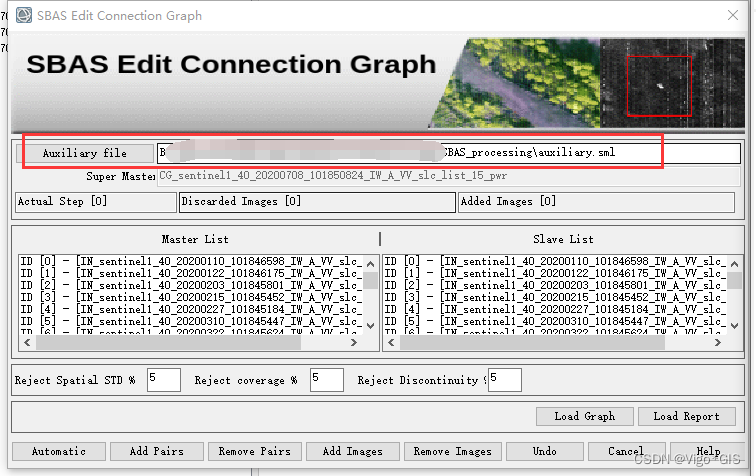
6.1 打开auxiliary.sml文件,会自动加载连接图,自动选择主影像
6.2 连接图编辑的参数说明
在工具页面,我们可以看到很多参数,尤其是SARScape5.6.2版本,有更多的可设置项目
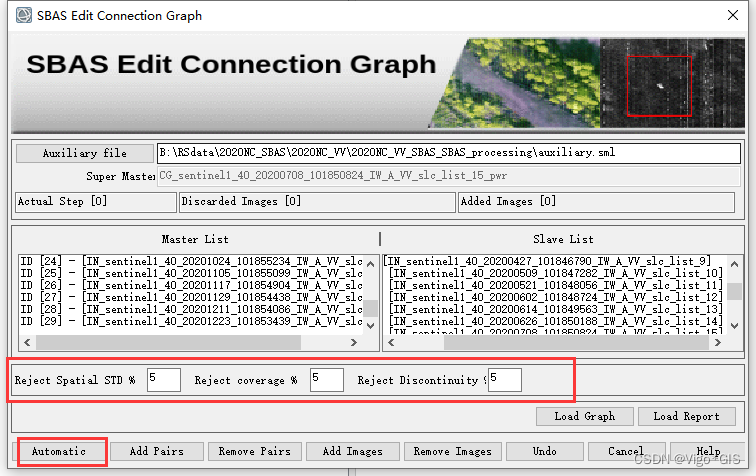
-
Automatic 自动
点击删除影像对编辑对将相应地使用 “自动剔除强不连续性 (%)”、“自动剔除高标准差 (%)”和“自动剔除低重叠率 (%)”参数自动完成。丢弃和保留stacking元数据/时间序列作为自动编辑工具行为的可视化描述生成。相应的最后处理的解缠元数据/时间序列也会更新。 -
Add Pairs 添加影像对
在“主列表”和“从列表”中选择的对将添加到原始连接网络中。必须从干涉工作流中重新运行该过程。不处理上一次迭代中处理的干涉对;只有新条目才会被处理。 -
Remove Pairs 删除影像对
仅在“从列表”中选择的影像将从原始连接网络中删除。可多选。 -
Add Images 添加影像
输入影像列表将添加到原始连接网络中。必须从干涉工作流中重新运行该过程。不处理上一次迭代中处理的干涉对;只有新条目才会被处理。 -
Remove Images 删除影像
在“主列表”或“从列表”中选择的影像将从原始连接网络中删除。 -
Reject Automatic Strong Discontinuities (%) 自动剔除强不连续性 (%)
通过将剔除阈值设置为高于零并单击“ SBAS 编辑连接图”面板的“自动”按钮,最差的干涉图(整个干涉图stacking的百分比)将从stacking中剔除。解缠干涉图排序的衡量指标是相对于有效像素数的间断相位周期数。 -
Edit Reject Automatic High Std (%) 自动剔除高标准差 (%)
通过将剔除阈值设置为高于零并单击“ SBAS 编辑连接图”面板的“自动”按钮,最差的干涉图(整个干涉图stacking的百分比)将从stacking中剔除。相应的最后处理的解缠元数据/时间序列也会更新。展开干涉图排序的度量是标准差。 -
Edit Reject Automatic Poor Coverage (%)自动剔除低重叠率 (%)
通过将剔除阈值设置为高于零并单击“ SBAS 编辑连接图”面板的“自动”按钮,最差的干涉图(整个干涉图stacking的百分比)将从stacking中丢弃。相应的最后处理的解缠元数据/时间序列也会更新。展开干涉图排序的衡量指标是有效像素覆盖率。 -
Undo 撤销
恢复以前的连接网络。
6.3 连接图编辑操作
再次说明:
-
由于每个人的经验不一样,判断需要移除的数据对也会不一样。这里总结一下需要剔
除的像对的常用标准:
1.如果干涉处理时候用了 3D 解缠的方法,建议保留(得到的结果含有 3D_del_upha 结果的说明进行的是 3D 解缠);
2.相干系数图_cc,一般亮度值比较高的相干性好;滤波后的干涉图_fint;相位解缠图_upha,最好是没有空洞和相位孤岛;只要其中一个结果较好,建议保留;
3.得到的结果含有明显的大气相位,建议剔除; -
在
\interferogram_stacking\interf_tiff文件夹中可以看到干涉工作流处理的结果,打开文件夹,打开查看,选择超大图标,这样就能在文件夹中预览结果了,当然也可以一张张放大了仔细看. -
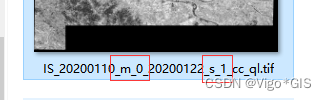
从数据名中解读影像对,数据名中的m代表master,表示主影像,m_0表示编号为0的主影像,20200110_m_0表示主影像是编号为0的日期为20200110的影像,s表示slave,从影像,20200122_s_1表示日期为20200122编号为1的从影像。
-
删除效果不好的数据对,先点击主影像列,在点击从影像列,最后点击删除对
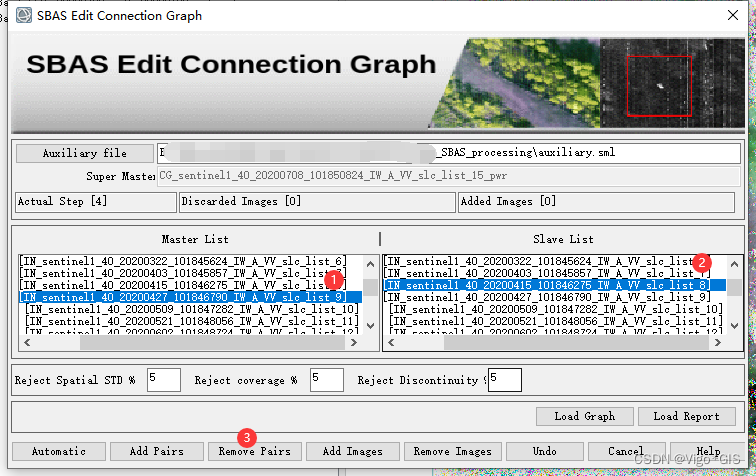
-
点击之后会弹出计算窗口,很快就会显示编辑完成
-
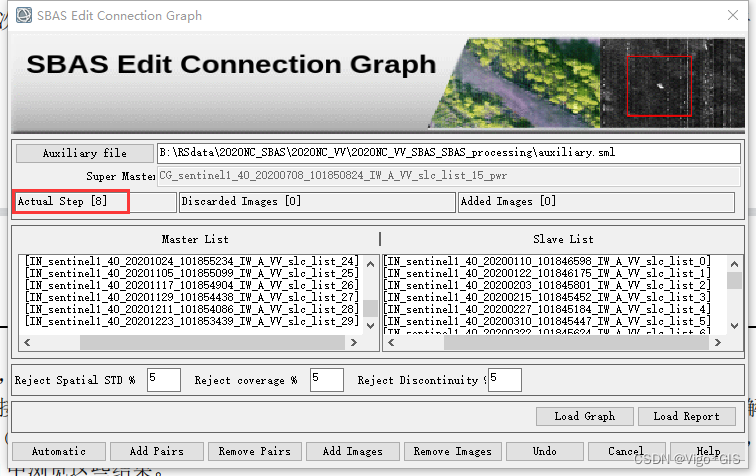
Actual Step显示编辑次数,编辑好了之后即可关闭窗口
6’ 轨道精炼和重去平,SARscape562集成在干涉数据流中,560及以下版本在SABS工具路径中
由于我用的是SARscape562,这一步已经集成在第五节-干涉工作流Interferometric Process中了
如果读者使用的是SARscape560及以前版本,请参考如下内容:
下面的内容是在【ENVI-SARscape新手教程中的摘抄】
这一步的目的是估算和去除残余的恒定相位和解缠后还存在的相位坡道。
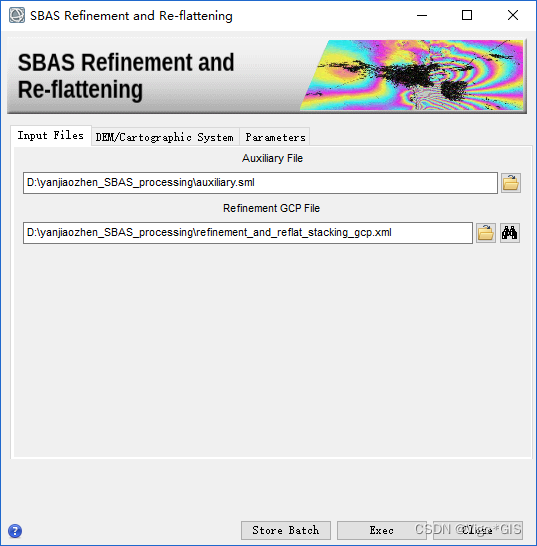
(1) 在 Toolbox 中,打开/SARscape/Interferometric Stacking/SBAS/3 - Refinement and Re-Flattening。
(2) 在 Input Files 面板中,在 Auxiliary file 选项中选择 auxiliary.sml。
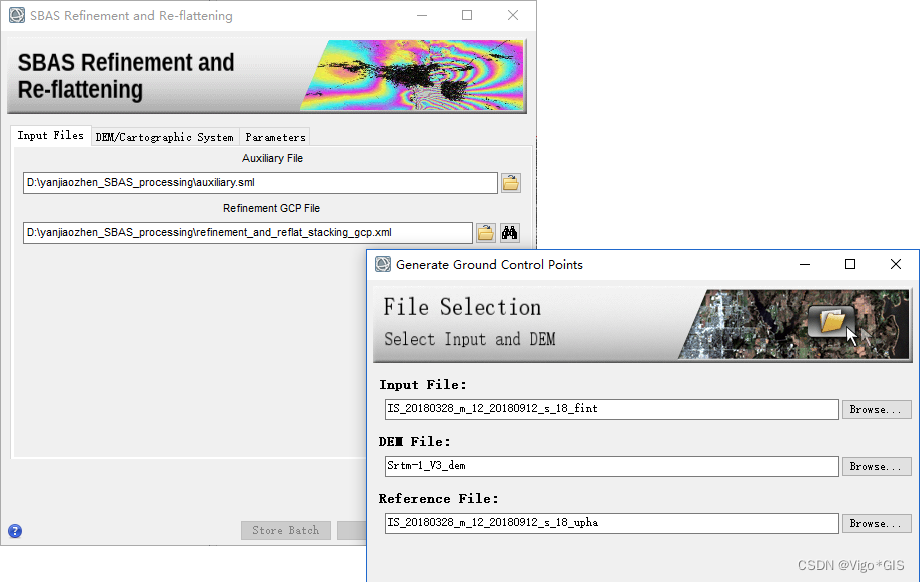
(3) 在 Refinement GCP file 选择中,单击按钮创建 GCP,在打开的 Generate Ground
Control Points 面板中,分别选择三个文件:
• Input File:必选项。用于 GCP 定位。这里选择一个数据对的解缠结果文件。
• DEM File:可选项。用于检测 GCP 对应的高程值。这里选择 DEM 文件。
• Reference File:可选项。为选择 GCP 提供一个参考依据,可以选择相干系数图、干涉图等,如这里选择一个去平和滤波后的干涉图,可以在判断地形和形变区域时提供参考。Reference File 与 Input File 同时显示在一个窗口中。
注:1、Input File 可以选择斜距投影(方位向和距离向)或者地理投影(x、y、z,其中z 自动从 DEM 数据中获取)数据,但同一个工程中只用一种投影方式(后续还有用到GCP 的地方)。这点不同于基本处理中的地理编码(basic geocoding)或者干涉图去平处理(the interferogram flattening)。典型的方式是在斜距数据上选择 GCP。除非 GCP 文件需要用在其他轨道数据上,这种情况就应该在地理投影的数据上选择。
2、在 SBAS 处理中,利用 GCP 是对所有数据对进行重去平,因此在选择 Input File文件的时候,如选择解缠结果文件作为 Input File,定位的 GCP 需要在所有数据对的解缠结果文件中都符合标准。建议在上一步检查数据对中间结果的时候就选择好一对可用于选择控制点的数据。
(4) 在 Generate Ground Control Points 面板中,单击能 Next 进入 GCP 选择面板。
(5) 利用鼠标功能在窗口中选择控制点。
说明:选择 GCP 重要的标准包括:
1、没有残余地形条纹;
2、没有形变条纹,远离形变区域,除非已知这个点的形变速率;
3、没有相位跃变,如果 GCP 点位于一个孤立相位上,并且解缠的值非常差,这个位置可能是斜坡相位(phase ramp)的一部分,那么选择的这个 GCP 是不对的;
4、由于在 SBAS 中,很难找到完美的 GCP 可以全部用在所有的数据对中,因为数据对拥有不同的相干性。因此建议多选择一些 GCP,至少 20-30 个点。
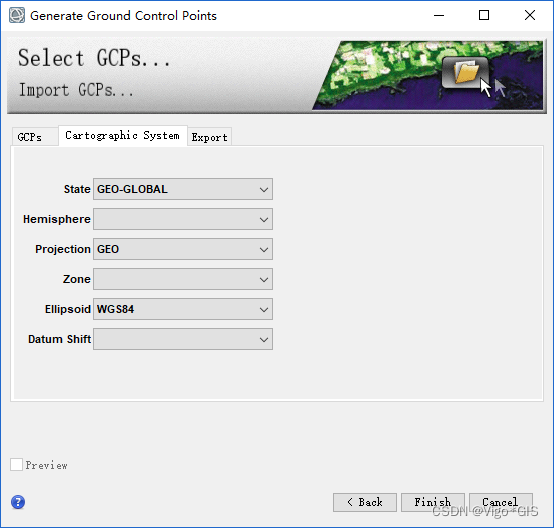
(6) 选择好控制点之后,Cartographic System 中默认为全球经纬度投影(输入的 DEM 文件的坐标系作为参考地理坐标系)
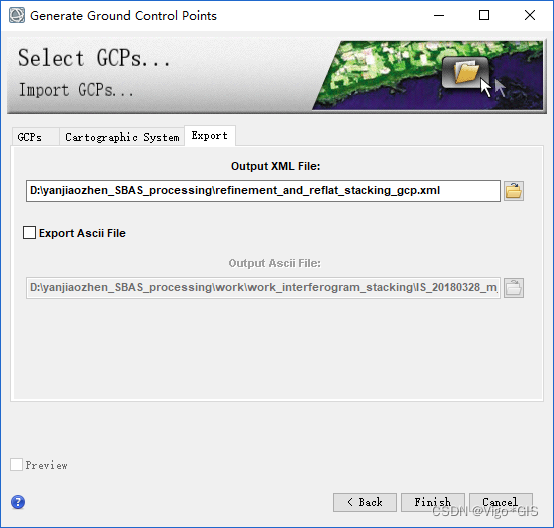
(7) 选择 Export 选项,默认自动选择一个输出路径和文件名,单击 Finish 按钮完成 GCP选择工作。
(8) 回到 Refinement and Re-Flattening 面板中。在 Input Files 面板,自动输入上一步得到的控制点文件;
(9) 单击 DEM/Cartographic System 面板,选择 dem 文件。
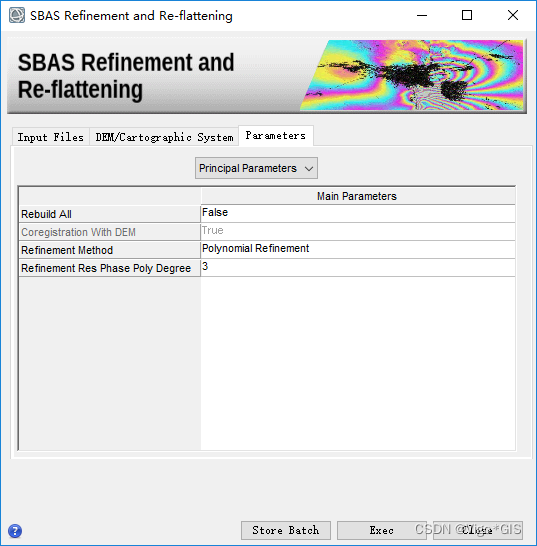
(10) 单击 Parameters 面板,选择 Principal Parameters 选项,设置以下参数:
• Rebuild All:False
• Refinement method:轨道精炼方法。这里选择 Polynomial Refinement,
• Refinement Residual Phase Polynomial Degree:3,精炼残余相位多项式次数。
(11) 单击 Exec 按钮执行处理。点击 Exec 进行处理。
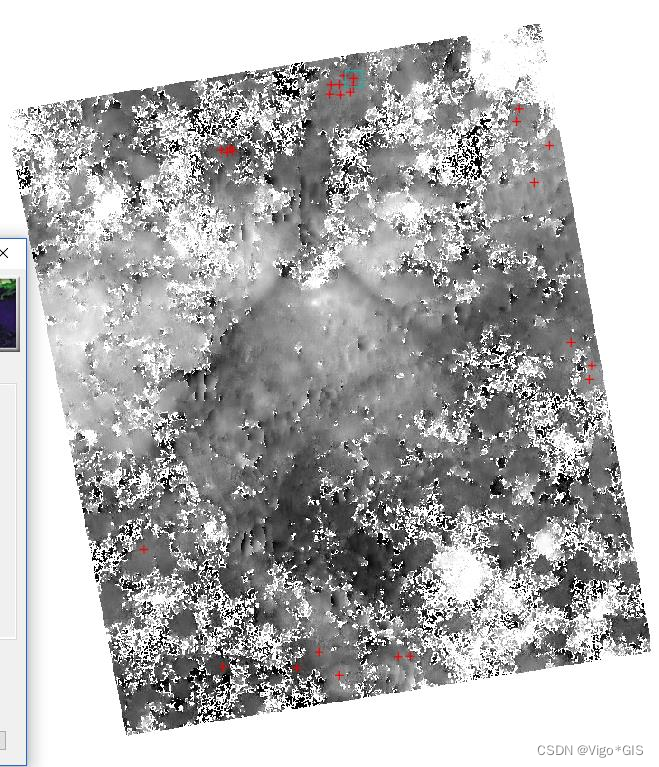
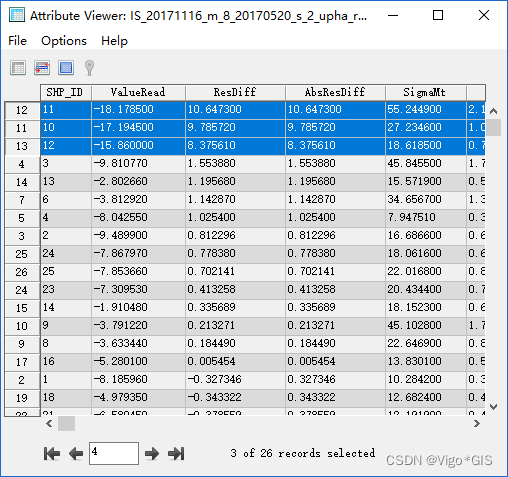
轨 道 精 炼 之 后 , 在 ENVI 中 打 开 控 制 点 文 件 , 路 径 为 :***_SBAS_processing\work\work_interferogram_stacking\IS_20171116_m_8_20170520_s_2_upha_refinement.shp。
在矢量图层上点击右键选择 View/Edit Attributes,打开属性表,查看 AbsResDiff 一列,把值比较大的点的 ID 号记录下来,以便稍后编辑。
相同的操作重新打开轨道精炼工具,导入数据,在 GCP 面板,导入上一次 GCP 点之后,把刚记录的误差大的点删除,在参数面板,设置 Rebuild All 为 True,重新进行一次轨道精炼。
同样的方法检查 GCP 点的属性,直到每个点的残差值都为一个较小的值。
————————————————
引用声明:该段文字引用自文档:[ENVI-SARscape入门教程-第8章短基线SBAS]
如果侵权请在评论区或私信联系我删除!谢谢
感谢阅读,由于篇幅过长,不能一次性写完,下半部分将很快更新,再次说明,所用软件为SARScape562教育版,图文若有侵权,请在评论区或私信内及时告知我删除!