文章目录
- GoogLeNet
- Inception Module
- 1x1 Conv
- 计算效果
- 代码实现
- 总结
- ResNet (残差网络)
- 问题引入
- 梯度消失
- 与传统神经网络的比较
- 代码实现
课程来源: 链接
对于前篇中所提到问题,设计出的是一种类似于LeNet5的线性结构,而对于大多数问题,简单的卷积神经网络无法满足需求,因此需要对其进行改进,使之成为一种更加复杂的网络。
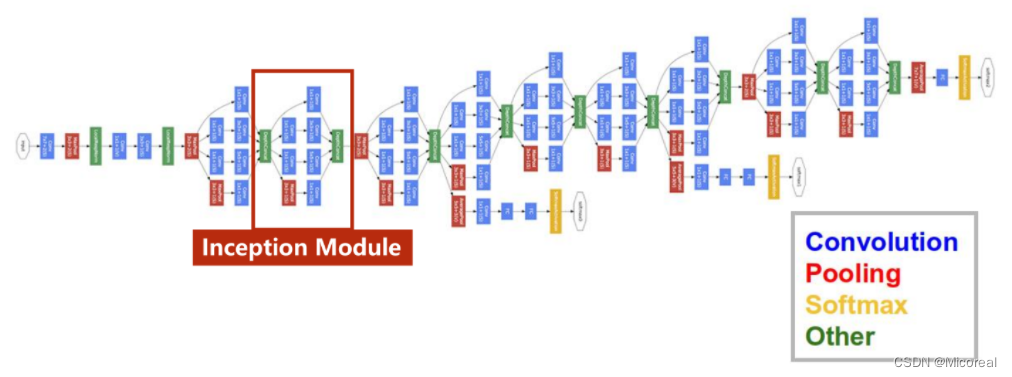
GoogLeNet
GoogLeNet包括卷积(Convolution),池化(Pooling)、全连接(Softmax)以及连接(Other)四个部分。
而为了减少代码的冗余,将由以上四个模块所组成的相同的部分,封装成一个类/函数,在GoogLeNet中,这样的部分被称为Inception Module。
Inception Module
实际上Inception Module以及GoogLeNet自身只是一种基础的网络结构,他的出现是为了解决构造网络时的部分超参数难以确定的问题。
以卷积核大小(kernel_size)为例,虽然无法具体确定某问题中所应使用的卷积核的大小。但是往往可以有几种备选方案,因此在这个过程中,可以利用这样的网络结构,来将所有的备选方案进行计算,并在后续计算过程中增大最佳方案的权重,以此来达到确定超参数以及训练网络的目的。
其中的具体成分可以根据问题进行调整,本文中所详细介绍的Inception Module也仅用作参考。
在上述四个路径(四种方法)中,最终的输出图必须仍然保持相同的W(图像宽度)以及H(图像高度),不然无法再次进行拼接传输到下一层模块中。
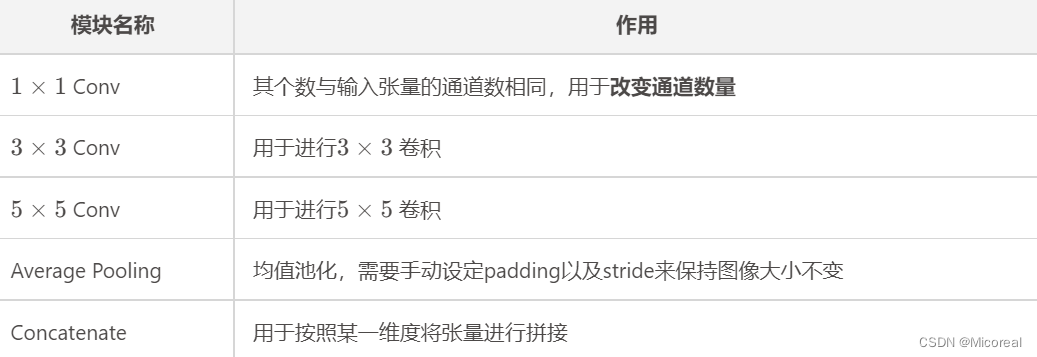
1x1 Conv
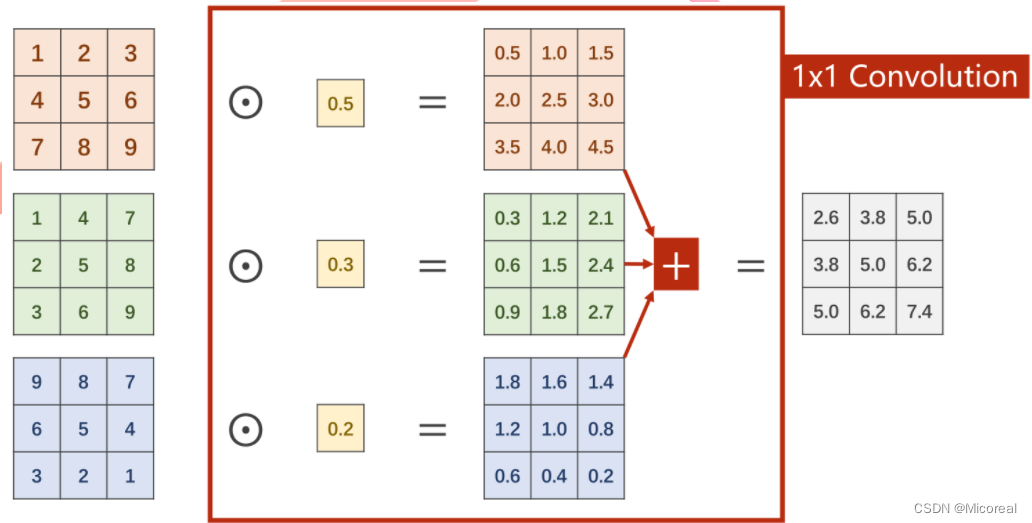
在 1 × 1 1\times1 1×1卷积中,每个通道的每个像素需要与卷积中的权重进行计算,得到每个通道的对应输出,再进行求和得到一个单通道的总输出,以达到信息融合的目的。即将同一像素位置的多个通道信息整合在同位置的单通道上。
若需要得到多通道的总输出,以M个通道为例,则需M组的卷积进行计算再进行堆叠拼接。此处和前篇中的多通道卷积是一样的。
计算效果
为说明
1
×
1
1 \times 1
1×1 卷积的效用,举例原图为
192
×
28
×
28
192 \times 28 \times 28
192×28×28的图像,即192个通道,宽高皆为28的图像。输出为
32
×
28
×
28
32 \times 28 \times 28
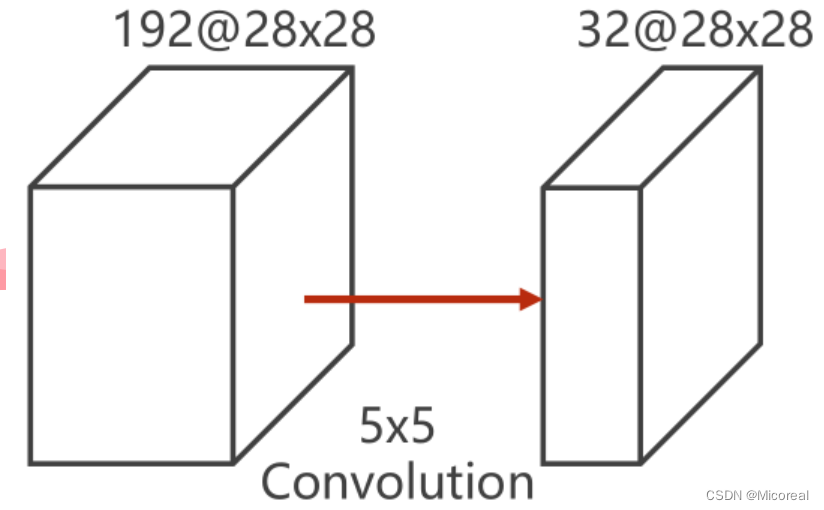
32×28×28的图像,即32个通道,宽高皆为28的图像。为保证前后大小一致,需要使每个像素都在卷积核的中央,即对原图进行padding操作。
若单纯利用一个
5
×
5
5 \times 5
5×5的卷积核进行卷积,此时对于每一次卷积,需要计算
5
2
5^2
52次,对于每一个通道需要计算
2
8
2
28^2
282次卷积,而原图中一共有128个通道,则需要再计算128轮次,此时得到一个单通道的
28
×
28
28 \times 28
28×28的的输出,因此需要重复上述计算32次,才能得到一个
32
×
28
×
28
32 \times 28 \times 28
32×28×28的输出。
即需要计算一亿两千万次以上
5
2
×
2
8
2
×
192
×
32
=
120422400
5^2 \times 28^2 \times 192 \times 32 = 120422400
52×282×192×32=120422400
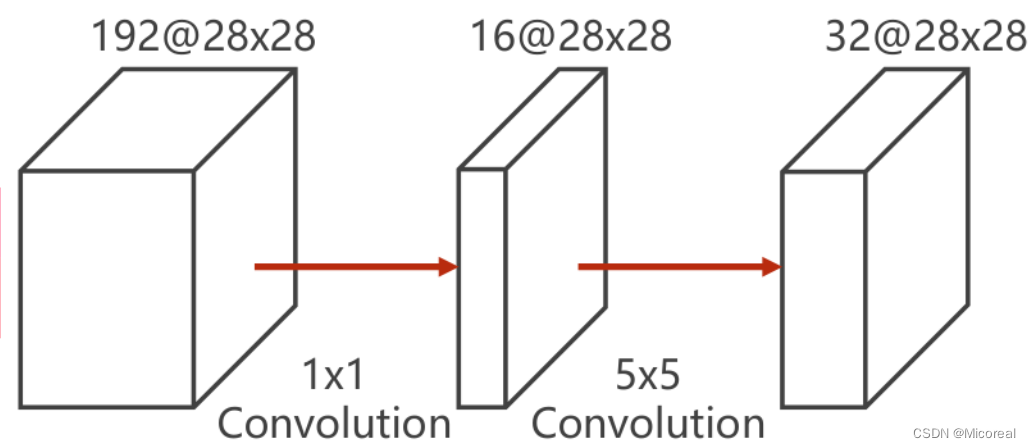
而对于添加
1
×
1
1 \times 1
1×1卷积核的结构,按照上述过程进行计算,仅需要计算一千两百万次左右,整体耗费已经缩减到了原先的十分之一。
1
2
×
2
8
2
×
192
×
16
+
5
2
×
2
8
2
×
16
×
16
=
12433648
1^2 \times 28^2 \times 192 \times 16 + 5^2 \times 28^2 \times 16 \times 16 = 12433648
12×282×192×16+52×282×16×16=12433648
代码实现
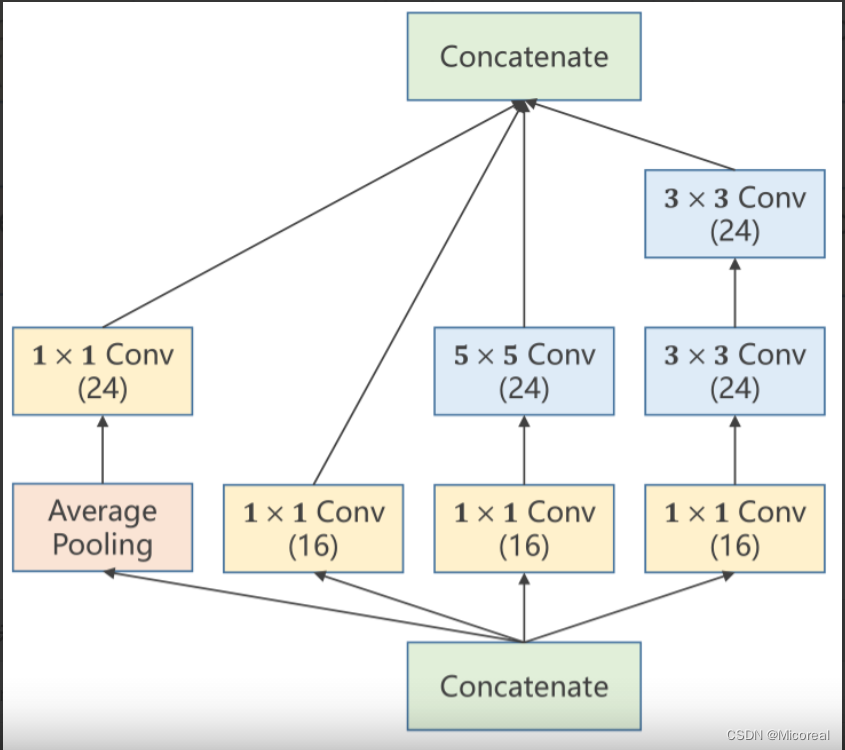
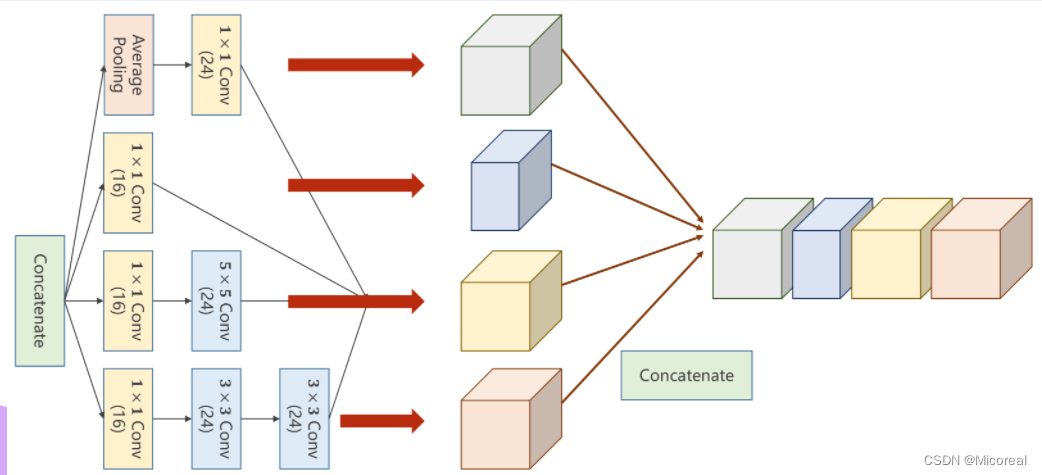
为了便于代码说明,此处将原Inception Module模块计算图进行了标注,并对模块中的每一个标注进行单独的代码补充,详解写在代码中
其中主要分为两部分,即对于每一条计算路径上的每一个子模块都包括init定义以及forward计算两部分组成。
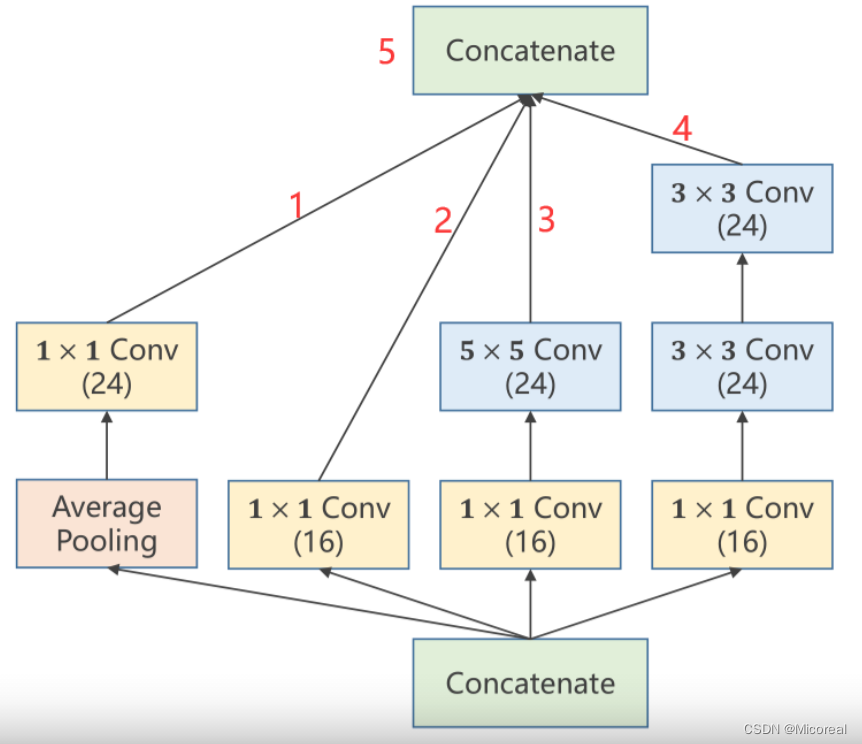
第一部分是由一个均值池化层以及一个输出通道为24的
1
×
1
1 \times 1
1×1的卷积构成
#init内定义1x1卷积(输入通道 输出通道 卷积核大小)
self.branch_pool = nn.Conv2d(in_channels, 24, kernel_size=1)
#forward内的方法
#avg_pool2d->均值池化函数 stride以及padding需要手动设置以保持图像的宽度和高度不变
branch_pool = F.avg_pool2d(x, kernel_size=3, stride=1, padding=1)
#括号内branch_pool的是池化后的结果,括号外的branch_pool是定义的1x1卷积,赋值给对象branch_pool
branch_pool = self.branch_pool(branch_pool)
第二部分是一个输出通道为16的单一的 1 × 1 1 \times 1 1×1的卷积
#init中的定义
self.branch1x1 = nn.Conv2d(in_channels, 16, kernel_size=1)
#将元数据直接用于卷积
branch1x1 = self.branch1x1(x)
第三部分包括一个输出通道为16的 1 × 1 1 \times 1 1×1的卷积,以及一个输出通道为24的 5 × 5 5 \times 5 5×5的卷积
#init定义
self.branch5x5_1 = nn.Conv2d(in_channels, 16, kernel_size=1)
#设置padding是为了保持图像宽高不变
self.branch5x5_2 = nn.Conv2d(16, 24, kernel_size=5, padding=2)
#按照计算图的顺序进行forward嵌套运算
branch5x5 = self.branch5x5_1(x)
branch5x5 = self.branch5x5_2(branch5x5)
第四部分包括一个输出通道为16的 1 × 1 1 \times 1 1×1的卷积和两个输出通道为24的 3 × 3 3 \times 3 3×3的卷积
self.branch3x3_1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch3x3_2 = nn.Conv2d(16, 24, kernel_size=3, padding=1)
self.branch3x3_3 = nn.Conv2d(24, 24, kernel_size=3, padding=1)
branch3x3 = self.branch5x5_1(x)
branch3x3 = self.branch3x3_2(branch3x3)
branch3x3 = self.branch3x3_3(branch3x3)
此时经过计算后,会得到各自通道数目不一但图像大小一致的四组图,再利用Concatenate按通道维度方向进行拼接即可得到输出图像
这一过程的步骤如下。
outputs = [branch1x1, branch5x5, branch3x3, branch_pool]
#dim=1 意味着按下标为1的维度方向拼接,在图像中即暗指通道(B,C,W,H)
return torch.cat(outputs, dim=1)
代码整理:
class InceptionA(nn.Module):
#仅是一个模块,其中的输入通道数并不能够指明
def __init__(self, in_channels):
super(InceptionA,self).__init__()
self.branch1x1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch5x5_1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch5x5_2 = nn.Conv2d(16, 24, kernel_size=5, padding=2)
self.branch3x3_1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch3x3_2 = nn.Conv2d(16, 24, kernel_size=3, padding=1)
self.branch3x3_3 = nn.Conv2d(24, 24, kernel_size=3, padding=1)
self.branch_pool = nn.Conv2d(in_channels, 24, kernel_size=1)
def forward(self, x):
branch1x1 = self.branch1x1(x)
branch5x5 = self.branch5x5_1(x)
branch5x5 = self.branch5x5_2(branch5x5)
branch3x3 = self.branch5x5_1(x)
branch3x3 = self.branch3x3_2(branch3x3)
branch3x3 = self.branch3x3_3(branch3x3)
branch_pool = F.avg_pool2d(x, kernel_size=3, stride=1, padding=1)
branch_pool = self.branch_pool(branch_pool)
outputs = [branch1x1, branch5x5, branch3x3, branch_pool]
return torch.cat(outputs, dim=1)
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 10, kernel_size=5)
# 在Inception的定义中,拼接后的输出通道数为24+16+24+24=88个
self.conv2 = nn.Conv2d(88, 20, kernel_size=5)
self.incep1 = InceptionA(in_channels=10)
self.incep2 = InceptionA(in_channels=20)
self.mp = nn.MaxPool2d(2)
#关于1408:
#每次卷积核是5x5,则卷积后原28x28的图像变为24x24的
#再经过最大池化,变为12x12的
#以此类推最终得到4x4的图像,又inception输出通道88,则转为一维后为88x4x4=1408个
self.fc = nn.Linear(1408, 10)
def forward(self,x):
in_size = x.size(0)
x = F.relu(self.mp(self.conv1(x)))
x = self.incep1(x)
x = F.relu(self.mp(self.conv2(x)))
x = self.incep2(x)
x = x.view(in_size, -1)
x = self.fc(x)
return x
总结
GooLeNet在于强调去把网络做得更加深层,借此使网络变得更为复杂。
ResNet (残差网络)
问题引入
若将某个大小固定的卷积核进行反复迭代,会不会得到更好的结果。
但事实上,以CIFAR-10为例,对于 3 × 3 3 \times 3 3×3的卷积而言,20层的训练效果要优于56层。由图中可以明显看出,在训练集以及测试集中,20层的误差是更小的。
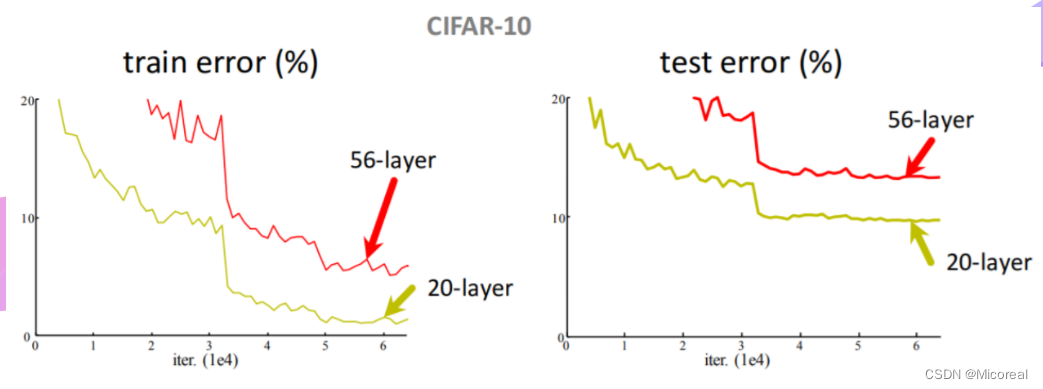
其中最可能的原因是梯度消失问题。
梯度消失
由于在梯度计算的过程中是用的反向传播,所以需要利用链式法则来进行梯度计算,是一个累乘的过程。若每一个地方梯度都是小于1的,即
∂
c
o
s
t
∂
ω
<
1
\frac{\partial cost}{\partial \omega} < 1
∂ω∂cost<1
,则累乘之后的总结果应趋近于0,即
∂
C
o
s
t
∂
Ω
→
0
\frac{\partial Cost}{\partial \Omega} \to 0
∂Ω∂Cost→0
由原先权重更新公式
ω
=
ω
−
α
∂
c
o
s
t
∂
ω
\omega = \omega - \alpha \frac{\partial cost}{\partial \omega}
ω=ω−α∂ω∂cost
可知,
∂
c
o
s
t
∂
ω
\frac{\partial cost}{\partial \omega}
∂ω∂cost趋近于0,则
ω
\omega
ω不会再进行进一步的更新。由于深度学习的网络层数较多,为了解决梯度消失问题,从而产生了ResNet。
与传统神经网络的比较
在Residual Net中引入了跳链接,即让输入在N(一般
N
=
2
N=2
N=2)层连接后并入第N层的输出,实现如图所示的
H
(
x
)
=
F
(
x
)
+
x
H(x) = F(x) + x
H(x)=F(x)+x
之后再进行relu激活,以此来得到输出。
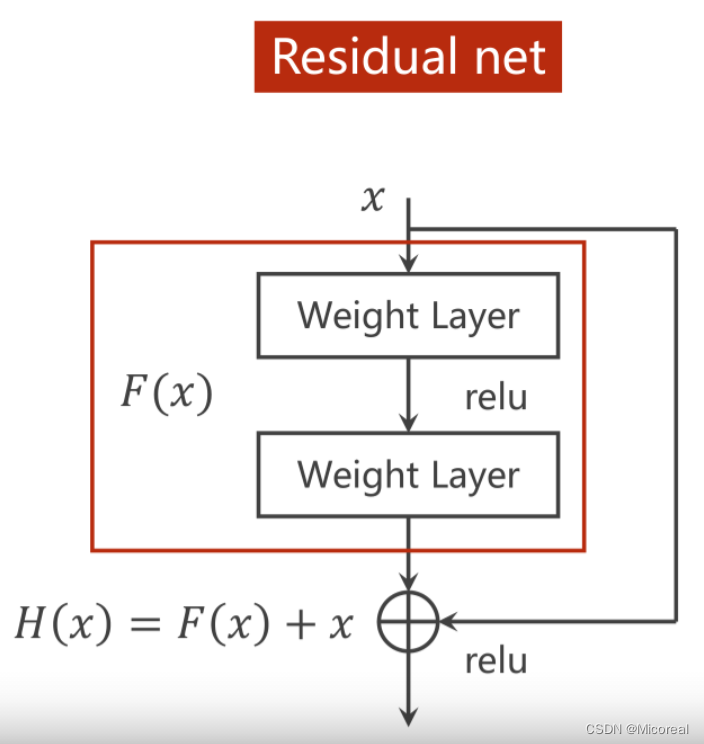
在这样的结构中,以上图为例,如果要进行
H
(
x
)
H(x)
H(x)对
x
x
x的求导,则会有
∂
H
(
x
)
∂
x
=
∂
F
(
x
)
∂
x
+
1
\frac{\partial H(x)}{\partial x} = \frac{\partial F(x)}{\partial x} + 1
∂x∂H(x)=∂x∂F(x)+1
即,若存在梯度消失现象,即存在某一层网络中的
∂
F
(
x
)
∂
x
→
0
\frac{\partial F(x)}{\partial x} \to 0
∂x∂F(x)→0,由于上式存在,则会使得在方向传播过程中,传播的梯度会保持在1左右,即
∂
H
(
x
)
∂
x
→
1
\frac{\partial H(x)}{\partial x} \to 1
∂x∂H(x)→1.如此,离输入较近的层也可以得到充分的训练。
代码实现
由于在ResNet中,跳链接需要实现一个权重层结果与输入相加的操作,则需要保证权重层的输出结果,与输入的维度是相同的。即等宽等高等通道数。
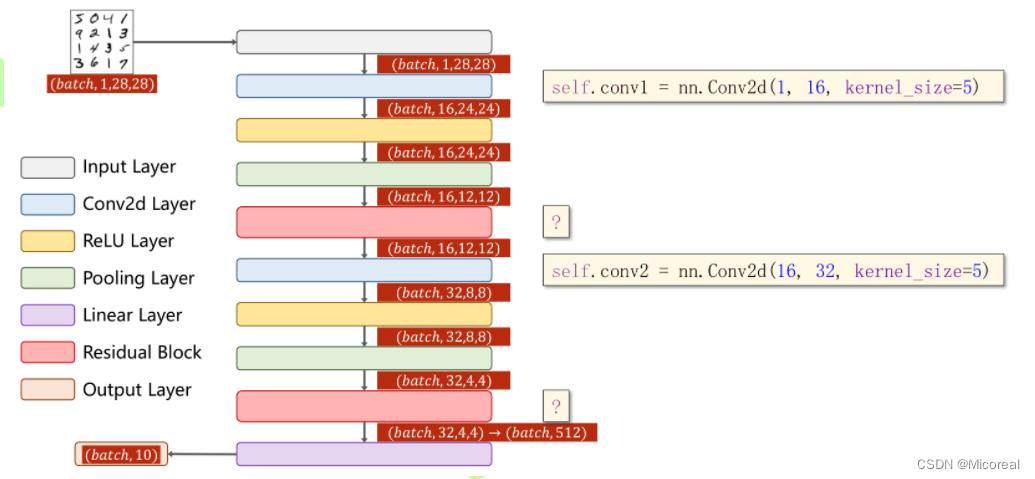
上图中标问号的红色块是残差块,其输入以及输出层的大小应当保持一致。
class RsidualBlock(nn.Module):
def __init__(self, in_channels):
super(RsidualBlock, self).__init__()
#保持输出和输入一致
self.channels = in_channels
self.conv1 = nn.Conv2d(in_channels, in_channels, kernel_size=3, padding=1)
self.conv2 = nn.Conv2d(in_channels, in_channels, kernel_size=3, padding=1)
def forward(self, x):
y = F.relu(self.conv1(x))
#第二层先求和再激活
y = self.conv2(y)
return F.relu(x+y)
结构代码:
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 16, kernel_size=5)
self.conv2 = nn.Conv2d(16, 32, kernel_size=5)
self.mp - nn.MaxPool2d(2)
self.rblock1 = ResiduleBlock(in_channels=16)
self.rblock2 = ResidualBlock(in_channels=32)
self.fc = nn.Linear(512, 10)
def forward(self,x):
in_size = x.size(0)
x = self.mp(F.relu(self.conv1(x)))
x = self.rblock1(x)
x = self.mp(F.relu(self.conv2(x)))
x = self.rblock2(x)
x = x.view(in_size, -1)
x = self.fc(x)
return x