🍒🍒🍒欢迎关注🌈🌈🌈
📝个人主页:我爱Matlab
👍点赞➕评论➕收藏 == 养成习惯(一键三连)🌻🌻🌻🍌希望大家多多支持🍓~一起加油 🤗
💬语录:将来的我一定会感谢现在奋斗的自己!
🍁🥬🕒摘要🕒🥬🍁
随着雷达技术的迅速发展,其应用领域不断拓展,现代雷达面临着更复杂的检测环境以及更多样的目标。在这种背景下,传统雷达目标检测算法已不能满足实际应用的需求,对微弱目标及复杂杂波环境中目标的检测性能受到限制。近年来,神经网络凭借着强大的特征提取能力、优秀的检测性能,使得雷达检测有了新的机遇,基于深度学习的雷达目标检测算法应运而生。但现有基于深度学习的雷达目标检测算法受到雷达设备及复杂多样的应用场景的限制,无法发挥其最优性能。在此基础上,为了进一步提高对微弱目标的检测性能,本文对复杂环境的雷达目标检测算法进行研究。
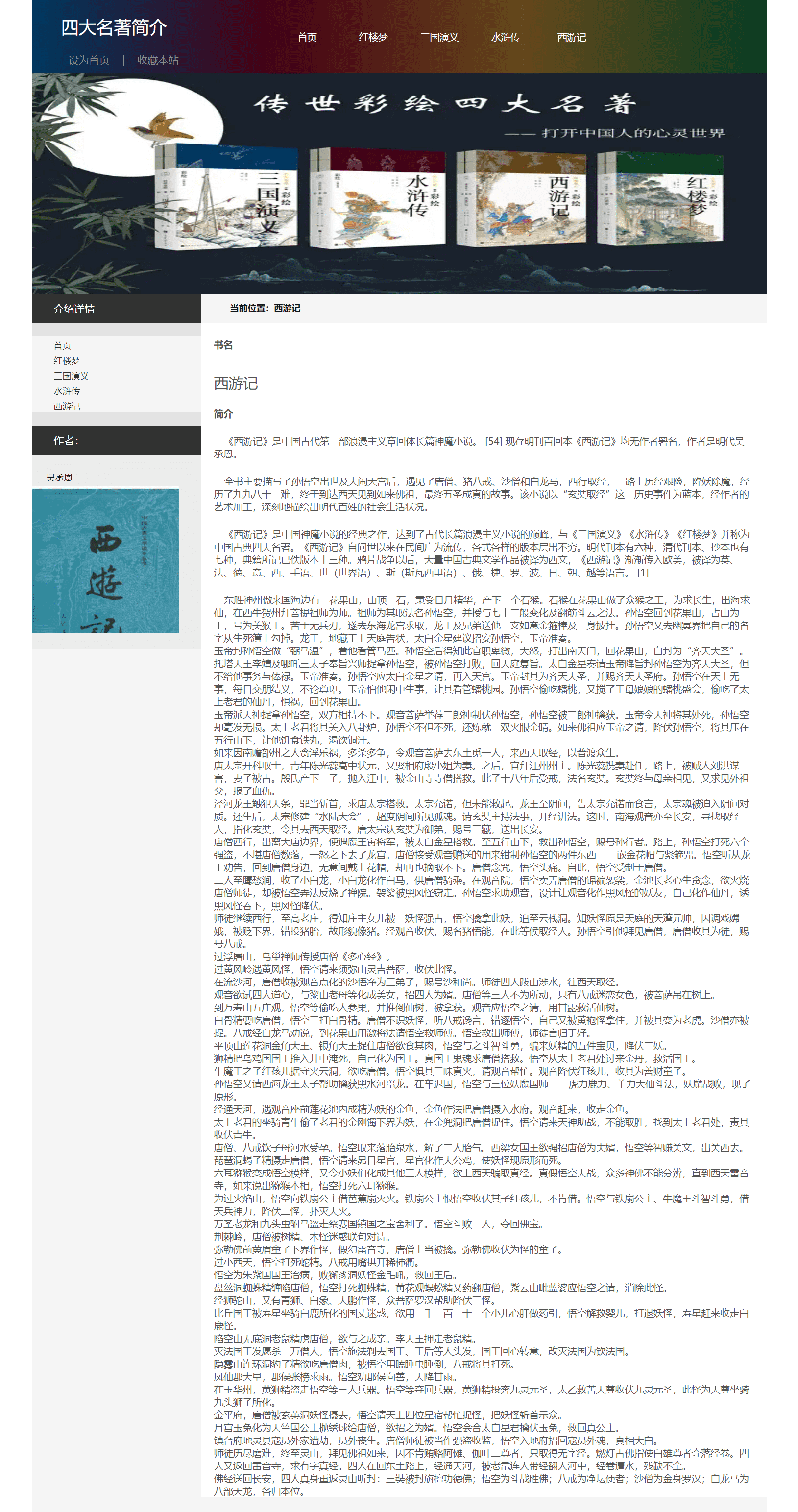
✨🔎⚡运行结果⚡🔎✨
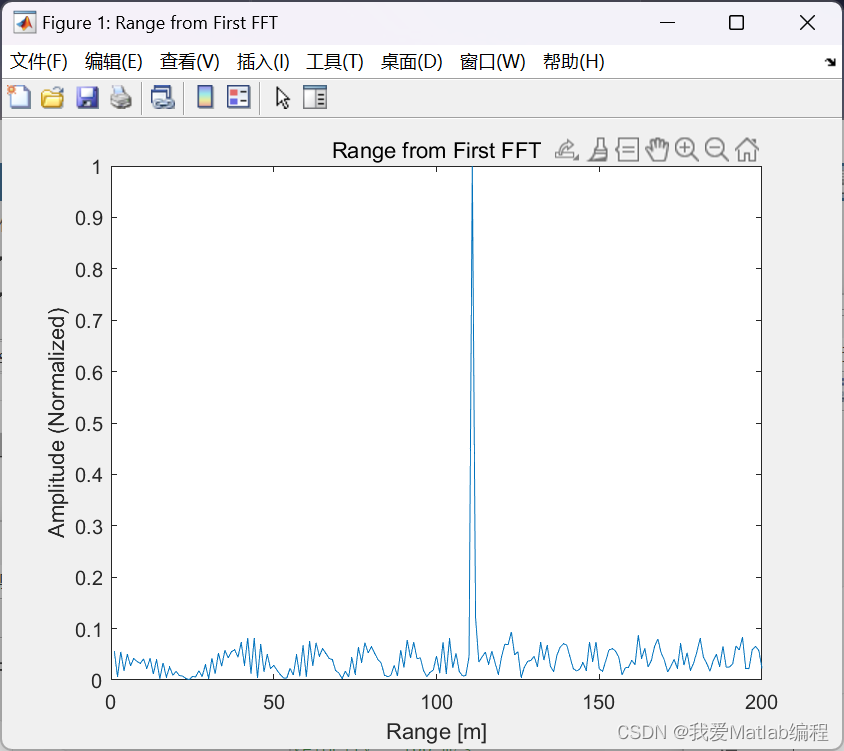
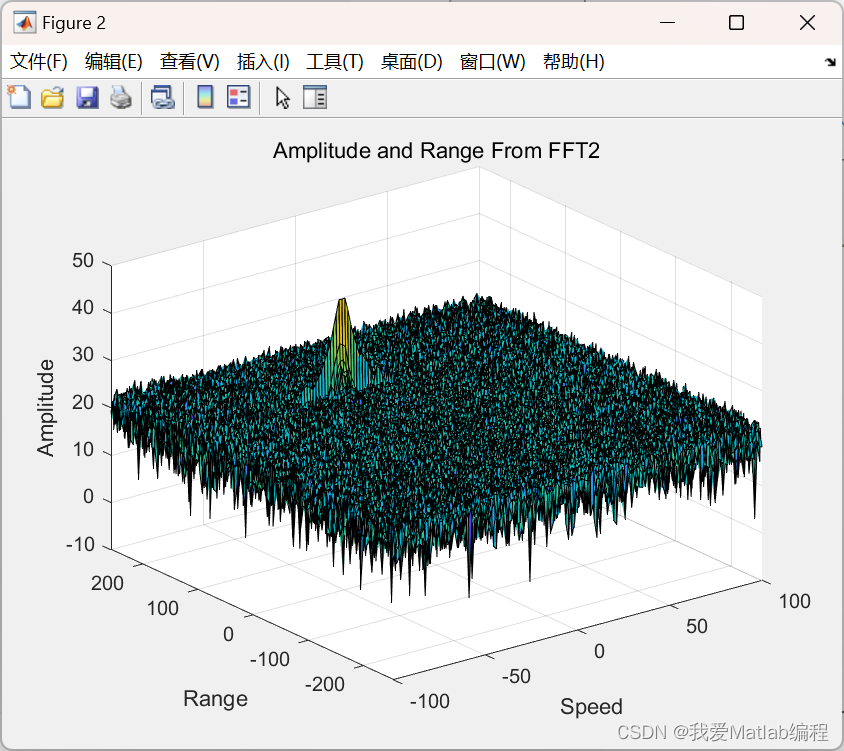
💂♨️👨🎓Matlab代码👨🎓♨️💂
clear all
clc;
%pkg load control % octave packages
%pkg load signal
%% Radar Specifications
%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Frequency of operation = 77GHz
% Max Range = 200m
% Range Resolution = 1 m
% Max Velocity = 100 m/s
%%%%%%%%%%%%%%%%%%%%%%%%%%%
c = 3e8
%% User Defined Range and Velocity of target
% *%TODO* :
% define the target's initial position and velocity. Note : Velocity
% remains contant
range = 110
vel = -20
max_range = 200
range_res = 1
max_vel = 100 % m/s
%% FMCW Waveform Generation
% *%TODO* :
%Design the FMCW waveform by giving the specs of each of its parameters.
% Calculate the Bandwidth (B), Chirp Time (Tchirp) and Slope (slope) of the FMCW
% chirp using the requirements above.
B = c / (2*range_res)
Tchirp = 5.5 * 2 * (max_range/c)
slope = B/Tchirp
%Operating carrier frequency of Radar
fc= 77e9; %carrier freq
%The number of chirps in one sequence. Its ideal to have 2^ value for the ease of running the FFT
%for Doppler Estimation.
Nd=128; % #of doppler cells OR #of sent periods % number of chirps
%The number of samples on each chirp.
Nr=1024; %for length of time OR # of range cells
% Timestamp for running the displacement scenario for every sample on each
% chirp
t=linspace(0,Nd*Tchirp,Nr*Nd); %total time for samples
%Creating the vectors for Tx, Rx and Mix based on the total samples input.
Tx=zeros(1,length(t)); %transmitted signal
Rx=zeros(1,length(t)); %received signal
Mix = zeros(1,length(t)); %beat signal
%Similar vectors for range_covered and time delay.
r_t=zeros(1,length(t));
td=zeros(1,length(t));
%% Signal generation and Moving Target simulation
% Running the radar scenario over the time.
for i=1:length(t)
% *%TODO*
%For each time stamp update the Range of the Target for constant velocity.
r_t(i) = range + (vel*t(i));
td(i) = (2 * r_t(i)) / c;
% *%TODO* :
%For each time sample we need update the transmitted and
%received signal.
Tx(i) = cos(2*pi*(fc*t(i) + (slope*t(i)^2)/2 ) );
Rx(i) = cos(2*pi*(fc*(t(i) -td(i)) + (slope * (t(i)-td(i))^2)/2 ) );
% *%TODO* :
%Now by mixing the Transmit and Receive generate the beat signal
%This is done by element wise matrix multiplication of Transmit and
%Receiver Signal
Mix(i) = Tx(i) .* Rx(i);
end
完整代码:基于复杂环境下的雷达目标检测技术(Matlab代码实现)
📜📢🌈参考文献🌈📢📜
[1]王海,刘明亮,蔡英凤,陈龙.基于激光雷达与毫米波雷达融合的车辆目标检测算法[J].江苏大学学报(自然科学版),2021,42(04):389-394.