👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
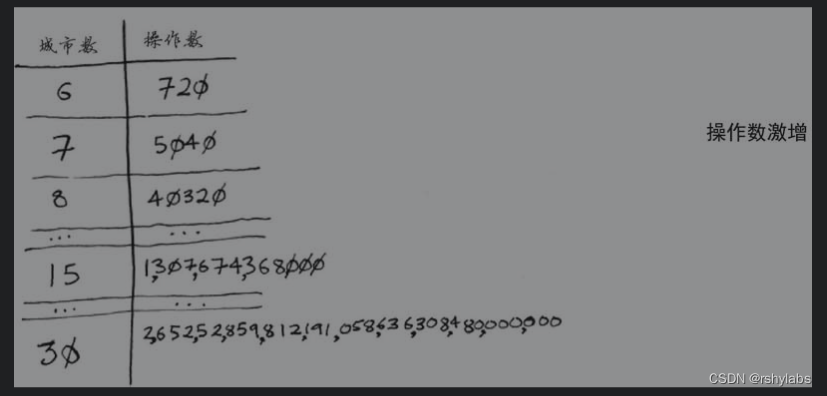
针对迭代后期搜索多样性不足、易陷入局部最优的问题,提出一种基于Levy飞行扰动策略的改进麻雀搜索算法。首先,利用Sin混沌搜索机制改进种群初始化策略。然后将Levy飞行扰动机制引入到麻雀种群的觅食搜索过程中,以拖拽种群移动合适的步长,增加空间搜索的多样性。
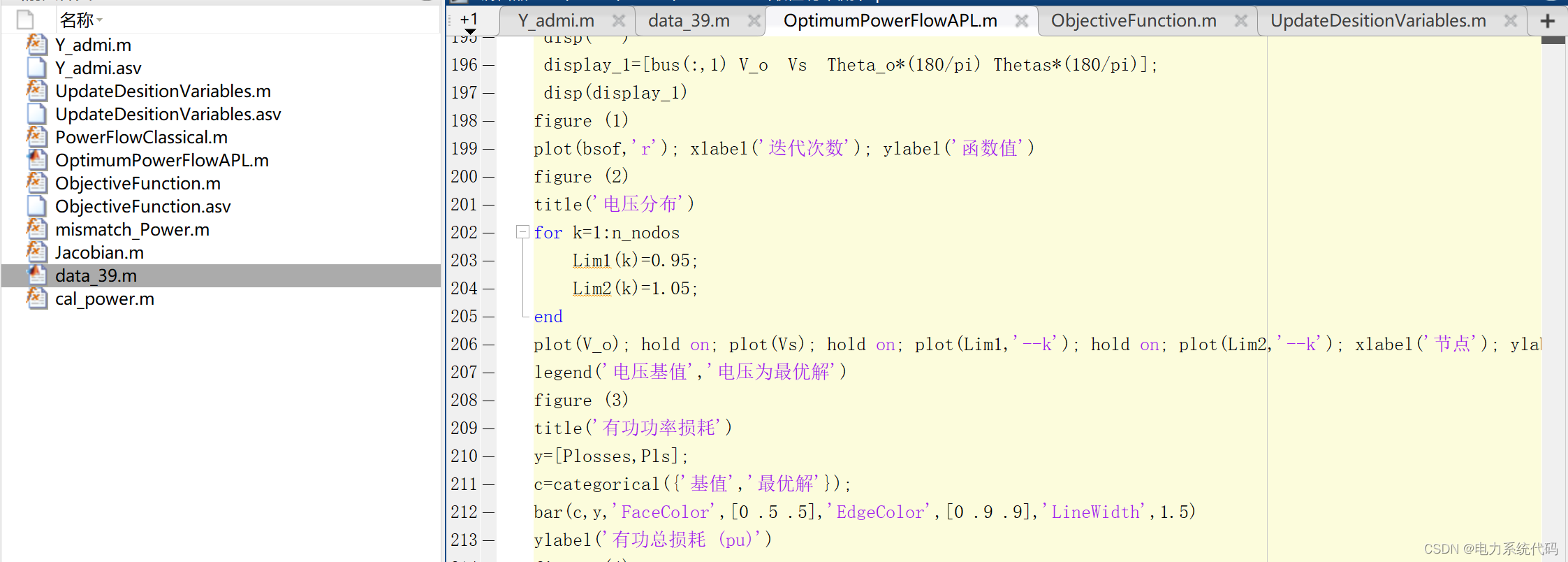
📚2 运行结果

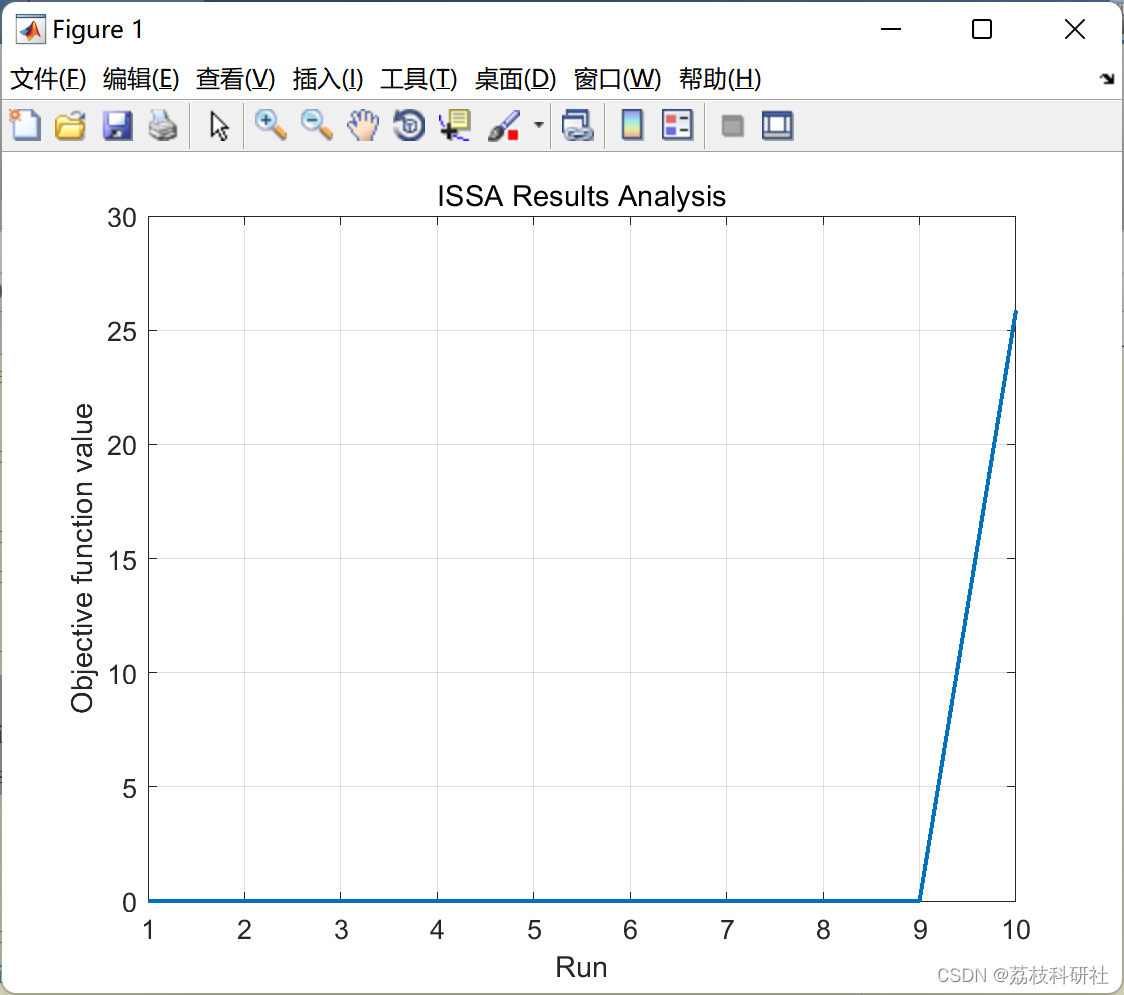
部分代码:
function [FoodFit,FoodPos,ConvCurve]=ISSA(Ntot,Ninit,tMax,LoB,UpB,Nvars,fobj)
%% Set parameters
% Percentage (nSOF) / number (NSOF) of inidividuals that are replaced by
% the Survival of the Fittest Mechanism
nSOF = 0.05; NSOF = round((1-nSOF) * Ntot);
% Min. and Max. Mutation Probability value
pMUTmax = 0.15 ; pMUTmin = 0.1;
% Min. and Max. Crossover Probability value
pCRSmax = 0.25 ; pCRSmin = 0.1;
% Min. and Max. Numberof Exploring Salps
NexpMax = round(Ntot * 0.5); NexpMin = 1;
%% Initialization
ConvCurve = zeros(1,tMax);
FoodPos = zeros(1,Nvars);
SalpFit = zeros(Ninit,1);
%% Initialize the positions of salps
nPos = ceil(Ninit/2);
Pos = rand(nPos,Nvars).*(UpB-LoB)+LoB;
OpPos = UpB + LoB - Pos;
SalpPos = [Pos;OpPos];
if mod(Ninit,2)
SalpPos(end,:)=[];
end
for i=1:Ninit
SalpFit(i,1)=fobj(SalpPos(i,:));
end
[SalpFit,sortIndex]=sort(SalpFit);
SalpPos = SalpPos(sortIndex,:);
SalpPos(Ntot+1:end,:) = [];
SalpFit(Ntot+1:end,:) = [];
FoodPos = SalpPos(1,:);
FoodFit = SalpFit(1);
ConvCurve(1) = FoodFit;
%% Main loop
t = 2; % First iteration was the initialization
while t <= tMax
% Compute c1 parameter
c1 = 2 * exp(-(4 * t / tMax) ^ 2);
% Compute Nexp (exploring salps number),
% pMUT (mutation probability),
% and pCRS (crossover probability).
Nexp = round(NexpMax * (t / tMax) + NexpMin); % Pun un round aici
pMUT = pMUTmax * (1- t / tMax) + pMUTmin;
pCRS = pCRSmax * t / tMax + pCRSmin;
for i = 1 : Ntot
% Update the leader and the exploring salps
if i <= Nexp
for j = 1 : Nvars
c2 = rand(); % Random weights
c3 = rand(); % Random number to decide the sign
c4 = rand; % Random number to decide if crossover applies
% Update the exploring salps using the first variant of crossover
if c4 < pCRS / 2
SalpPos(i,j) = FoodPos(j) * c2 + SalpPos(i,j) * (1 - c2);
% Update the exploring salps using the second variant of crossover
elseif c4 < pCRS
SalpPos(i,j) = FoodPos(j) * (1-c2 / 2) + SalpPos(i,j) * (c2 / 2);
% Update the exploring salps using the equation from the leader salp
else
if c3 < 0.5 % Decide the sign + or -
SalpPos(i,j) = FoodPos(j) + c1 * ((UpB(j) - LoB(j)) * c2 + LoB(j));
else
SalpPos(i,j) = FoodPos(j) - c1 * ((UpB(j) -LoB(j)) * c2 + LoB(j));
end
end
end % for j = 1 : Nvars
% Update the follower salps
elseif i > Nexp && i < NSOF
% The first follower salp is guided by the Food Position
if i == Nexp + 1
Salp1 = FoodPos;
% All the others are guided by the previous salp
else
Salp1 = SalpPos(i-1,:);
end
Salp2 = SalpPos(i,:);
if rand() > pMUT
% The new position is determined as weighted average between
% the previous and current salp
r1 = rand(); % Random weight
SalpPos(i,:) = Salp2 * r1 + Salp1 * (1 - r1); % fara 1/2 asta!!!!!
% Mutation is applied with the pMUT probability
else
r1 = rand(1,Nvars); % Random weight
r2 = sign(rand(1,Nvars) - 0.5); % Random number to decide the sign
SalpPos(i,:) = SalpPos(randi(Ntot),:) + r1 .* (r2 .*(UpB-LoB)+LoB) * c1;
end
% Eliminate the weakest salps and replace them with new random
% salps
elseif i>=NSOF && i<=Ntot
SalpPos(i,:) = rand(1,Nvars) .* (UpB - LoB) + LoB;
end
% Enforce Boundaries by replacing the value that violates a limit
% with the violated limit
Fupb=find(SalpPos(i,:)>UpB);
Flob=find(SalpPos(i,:)<LoB);
SalpPos(i,Fupb) = UpB(1,Fupb);
SalpPos(i,Flob) = LoB(1,Flob);
% Compute the salp fitnes
SalpFit(i,1) = fobj(SalpPos(i,:));
% If necessary update the Food Position and Fitness
if SalpFit(i,1) < FoodFit
FoodPos = SalpPos(i,:);
FoodFit = SalpFit(i,1);
end
end % for i = 1 : Ntot
% Sort the salps
[SalpFit,sortIndex] = sort(SalpFit);
SalpPos = SalpPos(sortIndex,:);
% Update the converge curve
ConvCurve(t)=FoodFit;
if 0% mod(l,10) == 0
display([t,FoodFit]);
end
% Increment iteration
t = t + 1;
end % while t <= tMax
end % function
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
Andrei M. Tudose, Irina I. Picioroaga, Dorian O. Sidea, Constantin Bulac Solving single- and multi-objective optimal reactive power dispatch
problem using an improved salp swarm algorithm

![[附源码]java毕业设计校园摄影爱好者交流网站](https://img-blog.csdnimg.cn/79177eac6d4b42f6b32735b5f29c735d.png)