上一篇:
(STM32)从零开始的RT-Thread之旅--SPI驱动ST7735(2)
上一篇完成了ST7735驱动的移植,并已经可以通过SPI在屏幕上显示字符了,这一章会把SPI修改为DMA的传输方式。由于RTT对于STM32H7的SPI的DMA传输方式目前支持的并不好,这就让上一章裸机方式驱动屏幕派上了用场。我们可以先把SPI+DMA打通,然后再修改内核驱动框架。
1.不使用驱动框架
把上一章中开启使用RTT驱动框架中的SPI的宏定义注释掉:

然后一定要在配置SPI前使能DMA的时钟:

然后到 stm32h7xx_hal_msp.c 中SPI引脚初始化下面添加相应SPI的DMA配置:
void HAL_SPI_MspInit(SPI_HandleTypeDef* hspi)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};
if(hspi->Instance==SPI4)
{
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_SPI4;
PeriphClkInitStruct.Spi45ClockSelection = RCC_SPI45CLKSOURCE_D2PCLK1;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
__HAL_RCC_SPI4_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
/**SPI4 GPIO Configuration
PE12 ------> SPI4_SCK
PE14 ------> SPI4_MOSI
*/
GPIO_InitStruct.Pin = GPIO_PIN_12|GPIO_PIN_14;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF5_SPI4;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOE, GPIO_PIN_12, GPIO_PIN_SET);
/* SPI4 DMA Init */
/* SPI4_TX Init */
hdma_spi4_tx.Instance = DMA1_Stream0;
hdma_spi4_tx.Init.Request = DMA_REQUEST_SPI4_TX;
hdma_spi4_tx.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_spi4_tx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_spi4_tx.Init.MemInc = DMA_MINC_ENABLE;
hdma_spi4_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_spi4_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_spi4_tx.Init.Mode = DMA_NORMAL;
hdma_spi4_tx.Init.Priority = DMA_PRIORITY_VERY_HIGH;
hdma_spi4_tx.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
hdma_spi4_tx.Init.FIFOThreshold = DMA_FIFO_THRESHOLD_FULL;
hdma_spi4_tx.Init.MemBurst = DMA_MBURST_SINGLE;
hdma_spi4_tx.Init.PeriphBurst = DMA_PBURST_SINGLE;
if (HAL_DMA_DeInit(&hdma_spi4_tx) != HAL_OK)
{
Error_Handler();
}
if (HAL_DMA_Init(&hdma_spi4_tx) != HAL_OK)
{
Error_Handler();
}
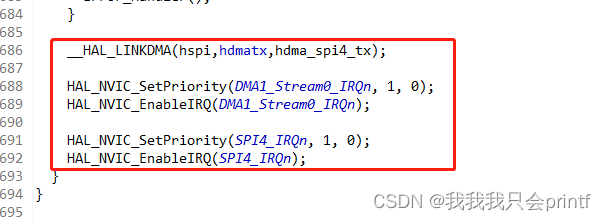
__HAL_LINKDMA(hspi,hdmatx,hdma_spi4_tx);
HAL_NVIC_SetPriority(DMA1_Stream0_IRQn, 1, 0);
HAL_NVIC_EnableIRQ(DMA1_Stream0_IRQn);
HAL_NVIC_SetPriority(SPI4_IRQn, 1, 0);
HAL_NVIC_EnableIRQ(SPI4_IRQn);
}
}这里注意外设和内存对齐:

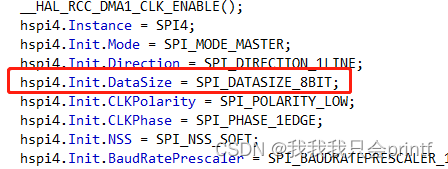
要和SPI前面配置的数据位数一致,我这里前面是:
还有就是配置结尾要打开相关中断,这里我只使用发送:
此时配置基本已经完成,相关配置详细信息可以参考我文末附的几篇教程,都写得很好很详细。
开启中断后,就必须要有中断函数,最最最开始的那一章我提到过,有关CubeMX生成的中断函数的那个.c我们没有加进整个工程里面,所以有些在CubeMX中添加了响应的中断,但是函数需要我们自己再添加进来,这里我添加的函数是:

这里添加的函数需要根据SPI配置的是双工还是单工来选择,所有的回调如下:
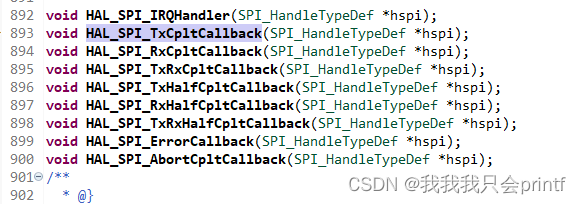
这里即使用的双工,也可以只配置一边是DMA,比如我使用的全双工,TX和RX都使用DMA,每次发送和接收只需调用 HAL_SPI_TransmitReceive_DMA ,它既包含发送又包含接收,那触发的中断肯定是 HAL_SPI_TxRxCpltCallback 了。这些由名字很好推断不再赘述。
剩下还需要修改的就是发送的数据所在内存。因为DMA1和2不能访问RTT Studio默认的RAM,默认RAM是从0x2000 0000开始,大小为128K的空间。像我使用的STM32H743VIT6这块芯片,有1M的RAM,但是实际上是分散为几块的,这里修改链接文件:
这里不要直接双击,而要选择打开方式:

这里根据芯片手册,添加剩余的RAM:

在.bss段后添加(ld脚本不熟悉可以看我很早之前写的关于GCC下stm32的ld文件的解析):

这里我们就定义了一个名叫.spi4.txbuf的段,然后把这个段的全部数据放在RAM4的地址范围内。接下来,我们只需要把想要通过SPI的DMA传输的数据保存在这个段内就可以了。在GCC编译器下可以使用__attribute__ 关键字:
uint8_t ram4_spi4_buf[RAM4_SPI4_BUF] __attribute__((section(".spi4.txbuf")));然后在map文件中查看是否定义成功:


可以看到ram4_spi4_buf这个数组使用了0x3800 0000~0x3800 0400这段地址空间。 这段空间是可以被DMA1访问的。
使用DMA之后最后还需要注意cache设置,这里可能出现数据一致性问题。什么是数据一致性问题?
当MCU运行频率过高时,代码执行效率就会收到RAM频率影响,因为很多时候代码执行需要把寄存器的数据加载到RAM中或者从RAM中读取到寄存器中,但是RAM的频率比MCU低时,MCU必须等待RAM的读写操作,大大降低了MCU的执行效率。这时候出现了一种方案,在RAM和MCU之间多加一块缓存,就是cache,它的读写很快能够跟上MCU,每次MCU需要RAM数据时,会先取一部分数据保存在cache中,如果MCU需要的数据已经在cache中有了,那就直接使用cache中的即可。这就会出现一个问题,我们DMA一定使用的是RAM到外设,而MCU有可能使用的cache中的缓存数据,这两个数据是每时每刻都一样的吗?肯定不是,MCU<-CACHE<-RAM,这cache和RAM之间数据肯定是需要时机和一定时间同步的,说到底,快只是快在MCU和cache已经保存有MCU需要的RAM数据的情况,当MCU需要的数据cache里面没有时,cache一样需要慢慢等待RAM的数据备份到cache里。当MCU需要的数据在cache中存在时,即使DMA改变了RAM中相应的数据,MCU并不知道,它还是会使用cache中的缓存数据,此时就会出现一致性问题。更多详细内容可以参考文末附的文章。
要解决这个问题,我们可以通过配置MPU来关闭某块内存的cache功能。 在 hw_board_init 中可以看到,当有定义使能cache的函数时,会自动调用这些函数:

在这之前我们配置RAM4的MPU:

完整函数如下:
/**
* This function will initial STM32 board.
*/
void hw_board_init(char *clock_src, int32_t clock_src_freq, int32_t clock_target_freq)
{
extern void rt_hw_systick_init(void);
extern void clk_init(char *clk_source, int source_freq, int target_freq);
MPU_Region_InitTypeDef MPU_InitStruct;
HAL_MPU_Disable();
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x38000000;
MPU_InitStruct.Size = MPU_REGION_SIZE_64KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER2;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
#ifdef SCB_EnableICache
/* Enable I-Cache---------------------------------------------------------*/
SCB_EnableICache();
#endif
#ifdef SCB_EnableDCache
/* Enable D-Cache---------------------------------------------------------*/
SCB_EnableDCache();
#endif
/* HAL_Init() function is called at the beginning of the program */
HAL_Init();
/* enable interrupt */
__set_PRIMASK(0);
/* System clock initialization */
clk_init(clock_src, clock_src_freq, clock_target_freq);
/* disbale interrupt */
__set_PRIMASK(1);
rt_hw_systick_init();
/* Pin driver initialization is open by default */
#ifdef RT_USING_PIN
extern int rt_hw_pin_init(void);
rt_hw_pin_init();
#endif
/* USART driver initialization is open by default */
#ifdef RT_USING_SERIAL
extern int rt_hw_usart_init(void);
rt_hw_usart_init();
#endif
}如果你使用的不是RAM4,可以只简单修改起始地址和大小。
最后回到mspi.c中修改发送接收函数。其中 mspi_send_reg 与 mspi_read_reg 函数我决定不再修改,因为读写reg通常都是一个字节,而使用DMA需要先把我们需要传输的数据copy到 ram4_spi4_buf 这个分配在RAM4的buf中,再使用SPI_DMA传输函数发送,感觉提升并不明显。所以只修改了 mspi_send_data 函数,它通常用来发送需要显示的大量数据,修改如下:

可以看到主要就是先把数据copy到ram4_spi4_buf里,然后用专用于DMA发送的HAL_SPI_Transmit_DMA函数传输。这里DMA传输用的是阻塞等待,发送前把一个全局状态置为busy,等待发送完成后的回调函数里再把状态置idle:

这个函数前面讲需要添加的中断里已经见到过了 ,至于状态定义,如下:

至此所有修改已经完成,正常已经可以测试DMA是否使用正常。
2.使用驱动框架
首先在board.h中添加使用SPI的TX的DMA的宏定义:

此时编译会发现有好几个错误:
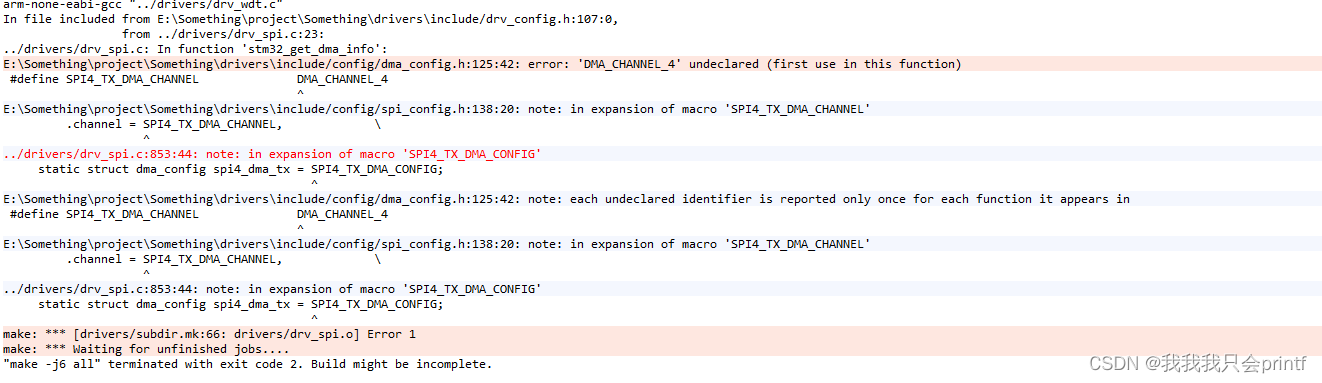
那是因为内核驱动框架根本没有适配STM32H7,我们先修改drv_dma.h中对于DMA相关结构体定义:

然后再修改dma_config.h中对于SPI4的配置:

这里可以根据上面不使用内核驱动框架的时候的 stm32h7xx_hal_msp.c 中的配置修改,反正使用DMA1还是2的哪个流都可以。注意H7没有channel,但有request。 然后配置完成后,就可以把 stm32h7xx_hal_msp.c 中相关配置给注释掉了。这些配置实际应用是在 spi_config.h 中:

有关这些配置的使用都在drv_spi.c中的rt_hw_spi_bus_init函数里,对照上面注释掉的配置,修改如下,具体参数请根据实际需求配置:

注意drv_spi.c中是有SPI4_IRQHandler和SPI4_DMA_TX_IRQHandler中断函数的,所以请注意mspi.c中的中断函数会和它重复定义,请把mspi.c中的中断函数加到USE_RTT_SPI宏定义else代码块内。
添加完这些正常应该可以使用了,但是实际使用会发现代码卡在,返回状态一直是HAL_SPI_STATE_BUSY_TX:

调用它的上层函数是spixfer :

在这个函数中可以看到当只有发送buf,且使能了TX发送DMA时调用的是:

这个函数中正常发送会把hspi->State 赋值为HAL_SPI_STATE_BUSY_TX:

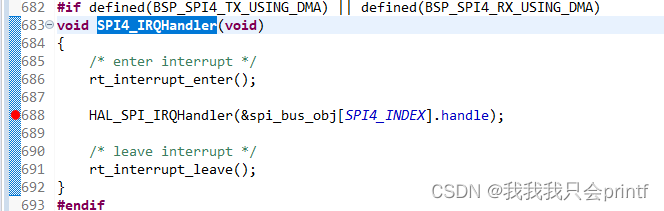
而这个状态在发送完成后没有被修改回来就会一直处于busy状态,它是在哪里被修改回来呢?
答案是 HAL_SPI_IRQHandler 函数 。而RTT内核默认是没有使用SPI的中断传输方式的,这可以从 spixfer 这个函数中调用的底层发送接收函数得知,所以当开启DMA后,又没有开启SPI中断就会出现这种情况。可以在中断函数内打上断点测试:
修改方式也很简单,假如没有使用RTT,可以直接在DMA使能中断的地方直接添加SPI中断配置与使能,这里我介绍一下在使用RTT下如何修改。在drv_spi.h中修改结构体:

在spi_config.h中添加:

在 drv_spi.c 中初始化函数 stm32_spi_init 的最后使能DMA中断处添加:

至此框架修改完毕,最后在上一章的基础上修改我们的发送接收函数,因为我们调用的是驱动框架的接口,不修改接口的情况下没办法像不使用框架那样,把普通SPI传输和SPI-DMA传输混合使用,这里只能都使用DMA传输,修改如下:
其他几个函数附在文章最后,仅供参考。
mspi.c
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2022-11-14 cx the first version
*/
#include<string.h>
#include <rtthread.h>
#include <rtdevice.h>
#include <stm32h7xx.h>
#include <drv_spi.h>
#include <mspi.h>
#include "st7735_reg.h"
#include "st7735.h"
enum
{
idle,
busy,
error
};
volatile uint32_t spi4_dma_status = idle;
uint8_t ram4_spi4_buf[RAM4_SPI4_BUF] __attribute__((section(".spi4.txbuf")));
#define USE_RTT_SPI
SPI_HandleTypeDef *spi_handle;
#ifdef USE_RTT_SPI
static struct rt_spi_device *spi_lcd;
#define LCD_RD_HIGH rt_pin_write(SPI_RD_PIN_NUM, PIN_HIGH)
#define LCD_RD_LOW rt_pin_write(SPI_RD_PIN_NUM, PIN_LOW)
#else
extern SPI_HandleTypeDef hspi4;
#define SPI_Drv (&hspi4)
#define LCD_CS_HIGH HAL_GPIO_WritePin(GPIOE,GPIO_PIN_11,GPIO_PIN_SET)
#define LCD_CS_LOW HAL_GPIO_WritePin(GPIOE,GPIO_PIN_11,GPIO_PIN_RESET)
#define LCD_RD_HIGH HAL_GPIO_WritePin(GPIOE,GPIO_PIN_13,GPIO_PIN_SET)
#define LCD_RD_LOW HAL_GPIO_WritePin(GPIOE,GPIO_PIN_13,GPIO_PIN_RESET)
#endif
#ifdef USE_RTT_SPI
int32_t mspi_send_reg(uint8_t reg,uint8_t *data,uint32_t len)
{
struct rt_spi_message msg;
uint32_t remsg = RT_NULL;
ram4_spi4_buf[0] = reg;
memcpy(&ram4_spi4_buf[1],data,len);
msg.send_buf = &ram4_spi4_buf[0];
msg.recv_buf = RT_NULL;
msg.length = 1;
msg.cs_take = 1;
msg.cs_release = 0;
msg.next = RT_NULL;
LCD_RD_LOW;
remsg = (uint32_t)rt_spi_transfer_message(spi_lcd,&msg);
LCD_RD_HIGH;
if(len > 0)
{
msg.send_buf = &ram4_spi4_buf[1];
msg.recv_buf = RT_NULL;
msg.length = len;
msg.cs_take = 0;
msg.cs_release = 1;
msg.next = RT_NULL;
remsg += (uint32_t)rt_spi_transfer_message(spi_lcd,&msg);
}
if(remsg!=RT_NULL)
return -1;
else
return 0;
}
int32_t mspi_read_reg(uint8_t reg,uint8_t *data)
{
struct rt_spi_message msg;
uint32_t remsg = RT_NULL;
ram4_spi4_buf[0] = reg;
msg.send_buf = &ram4_spi4_buf[0];
msg.recv_buf = RT_NULL;
msg.length = 1;
msg.cs_take = 1;
msg.cs_release = 0;
msg.next = RT_NULL;
LCD_RD_LOW;
remsg = (uint32_t)rt_spi_transfer_message(spi_lcd,&msg);
LCD_RD_HIGH;
if(remsg == 0)
{
msg.send_buf = RT_NULL;
msg.recv_buf = data;
msg.length = 1;
msg.cs_take = 0;
msg.cs_release = 1;
msg.next = RT_NULL;
remsg += (uint32_t)rt_spi_transfer_message(spi_lcd,&msg);
}
if(remsg!=RT_NULL)
return -1;
else
return 0;
}
int32_t mspi_send_data(uint8_t *data,uint32_t len)
{
struct rt_spi_message msg;
memcpy(ram4_spi4_buf,data,len);
msg.send_buf = ram4_spi4_buf;
msg.recv_buf = RT_NULL;
msg.length = len;
msg.cs_take = 1;
msg.cs_release = 1;
msg.next = RT_NULL;
return (uint32_t)rt_spi_transfer_message(spi_lcd,&msg);
}
int32_t mspi_read_data(uint8_t *data,uint32_t len)
{
struct rt_spi_message msg;
msg.send_buf = RT_NULL;
msg.recv_buf = data;
msg.length = len;
msg.cs_take = 1;
msg.cs_release = 1;
msg.next = RT_NULL;
return (uint32_t)rt_spi_transfer_message(spi_lcd,&msg);
}
#else
int32_t mspi_send_reg(uint8_t reg,uint8_t *data,uint32_t len)
{
int32_t result;
LCD_CS_LOW;
LCD_RD_LOW;
result = HAL_SPI_Transmit(SPI_Drv,®,1,100);
LCD_RD_HIGH;
if(len > 0)
result += HAL_SPI_Transmit(SPI_Drv,data,len,500);
LCD_CS_HIGH;
if(result>0){
result = -1;}
else{
result = 0;}
return result;
}
int32_t mspi_read_reg(uint8_t reg,uint8_t *data)
{
int32_t result;
LCD_CS_LOW;
LCD_RD_LOW;
result = HAL_SPI_Transmit(SPI_Drv,®,1,100);
LCD_RD_HIGH;
result += HAL_SPI_Receive(SPI_Drv,data,1,500);
LCD_CS_HIGH;
if(result>0){
result = -1;}
else{
result = 0;}
return result;
}
int32_t mspi_send_data(uint8_t *data,uint32_t len)
{
int32_t result;
memcpy(ram4_spi4_buf,data,len);
LCD_CS_LOW;
// result =HAL_SPI_Transmit(SPI_Drv,data,len,100);
spi4_dma_status = busy;
if(HAL_SPI_Transmit_DMA(SPI_Drv,ram4_spi4_buf,len) != HAL_OK)
{
rt_kprintf("SPI4 DMA trans err\n");
return -1;
}
else
{
while(spi4_dma_status==busy);
result = 0;
}
LCD_CS_HIGH;
if(result>0)
{
result = -1;
}
else
{
result = 0;
}
return result;
}
int32_t mspi_read_data(uint8_t *data,uint32_t len)
{
int32_t result;
LCD_CS_LOW;
result = HAL_SPI_Receive(SPI_Drv,data,len,500);
LCD_CS_HIGH;
if(result>0)
{
result = -1;
}
else
{
result = 0;
}
return result;
}
extern DMA_HandleTypeDef hdma_spi4_tx;
void DMA1_Stream0_IRQHandler(void)
{
HAL_DMA_IRQHandler(&hdma_spi4_tx);
}
void HAL_SPI_TxCpltCallback(SPI_HandleTypeDef *hspi)
{
spi4_dma_status = idle;
}
void SPI4_IRQHandler(void)
{
HAL_SPI_IRQHandler(&hspi4);
}
void HAL_SPI_ErrorCallback(SPI_HandleTypeDef *hspi)
{
spi4_dma_status = error;
}
#endif
int32_t mspi_get_tick(void)
{
return HAL_GetTick();
}
void mspi_rw_gpio_init(void)
{
#ifdef USE_RTT_SPI
rt_pin_mode(SPI_RD_PIN_NUM, PIN_MODE_OUTPUT);
rt_pin_write(SPI_RD_PIN_NUM, PIN_HIGH);
#else
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOE_CLK_ENABLE();
HAL_GPIO_WritePin(GPIOE, GPIO_PIN_11|GPIO_PIN_13, GPIO_PIN_SET);
GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
#endif
}
void mspi_init(void)
{
mspi_rw_gpio_init();
#ifdef USE_RTT_SPI
struct rt_spi_configuration cfg;
rt_hw_spi_device_attach("spi4", "spi40", GPIOE, GPIO_PIN_11);
spi_lcd = (struct rt_spi_device *)rt_device_find("spi40");
if(!spi_lcd)
{
rt_kprintf("spi40 can't find\n");
}
else
{
spi_lcd->bus->owner = spi_lcd;
cfg.data_width = 8;
cfg.mode = RT_SPI_MASTER | RT_SPI_3WIRE | RT_SPI_MODE_0 | RT_SPI_MSB;
cfg.max_hz = 12.5 * 1000 * 1000;
rt_spi_configure(spi_lcd, &cfg);
}
//也可以初始化使用框架提供的函数,发送接收使用HAL库函数,操作对象就是下面的 spi_handle
// struct stm32_spi *spi_drv = rt_container_of(spi_lcd->bus, struct stm32_spi, spi_bus);
// spi_handle = &spi_drv->handle;
#else
__HAL_RCC_DMA1_CLK_ENABLE();
hspi4.Instance = SPI4;
hspi4.Init.Mode = SPI_MODE_MASTER;
hspi4.Init.Direction = SPI_DIRECTION_1LINE;
hspi4.Init.DataSize = SPI_DATASIZE_8BIT;
hspi4.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi4.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi4.Init.NSS = SPI_NSS_SOFT;
hspi4.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;
hspi4.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi4.Init.TIMode = SPI_TIMODE_DISABLE;
hspi4.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi4.Init.CRCPolynomial = 0x0;
hspi4.Init.NSSPMode = SPI_NSS_PULSE_DISABLE;
hspi4.Init.NSSPolarity = SPI_NSS_POLARITY_LOW;
hspi4.Init.FifoThreshold = SPI_FIFO_THRESHOLD_01DATA;
hspi4.Init.TxCRCInitializationPattern = SPI_CRC_INITIALIZATION_ALL_ZERO_PATTERN;
hspi4.Init.RxCRCInitializationPattern = SPI_CRC_INITIALIZATION_ALL_ZERO_PATTERN;
hspi4.Init.MasterSSIdleness = SPI_MASTER_SS_IDLENESS_00CYCLE;
hspi4.Init.MasterInterDataIdleness = SPI_MASTER_INTERDATA_IDLENESS_00CYCLE;
hspi4.Init.MasterReceiverAutoSusp = SPI_MASTER_RX_AUTOSUSP_DISABLE;
hspi4.Init.MasterKeepIOState = SPI_MASTER_KEEP_IO_STATE_DISABLE;
hspi4.Init.IOSwap = SPI_IO_SWAP_DISABLE;
if (HAL_SPI_Init(&hspi4) != HAL_OK)
{
rt_kprintf("ERROR\n");
}
#endif
}
参考文章:
【STM32H7教程】第72章 STM32H7的SPI总线基础知识和HAL库API
【STM32H7教程】第94章 STM32H7的SPI总线应用之双机通信(DMA方式)
STM32 H7 配置SPI&DMA小结
STM32H7---高速缓存Cache(一)