前言
参与 NVIDIA自动驾驶开发者实验室 活动,以及解读了 NVIDIA 安全报告 自动驾驶 白皮书,本文是我的一些思考和见解。自动驾驶技术的目标是为了改善道理安全、减少交通堵塞,重塑更安全、高效、包容的交通生态。在这一领域,NVIDIA 凭借其在 AI 与加速计算的深厚积累,构建了从芯片到软件、从仿真到落地的全栈技术体系,成为全球车企和开发者的核心合作伙伴。可概括为三点:
-
端到端 AI 驱动:通过统一模型覆盖感知、规划到控制的完整驾驶流程,减少传统模块化设计的复杂性与延迟。
-
物理精准仿真:借助 Omniverse 平台生成极端场景的合成数据,覆盖暴雨、夜间、复杂交通等高风险场景,降低实车测试风险。
-
冗余安全架构:基于 DRIVE AGX Orin/Thor 芯片的硬件冗余设计,结合 ISO 26262/21448 等国际安全标准,实现系统级故障容错。
安全性上,NVIDIA 的自动驾驶技术以“零事故”为愿景,通过四大安全支柱构建防护闭环,从数据标注到道路测试的全链路均以安全为第一优先级。

见解
1. 安全模型:从仿真到落地的三重验证
NVIDIA 提出“AI 训练-仿真-车载部署”的铁人三项开发模型,确保自动驾驶系统在虚拟与现实中均表现可靠:
-
AI 训练:依托 DGX 超算集群,在 PB 级多样化数据上训练深度神经网络(DNN),覆盖全球不同地区的道路场景。
-
仿真验证:通过 Omniverse 平台生成高保真虚拟环境,模拟极端天气、传感器失效等罕见场景,验证算法鲁棒性。
-
车载部署:DRIVE AGX 车载计算机实时处理传感器数据,结合冗余硬件与动态安全策略,确保车辆在故障时进入“最小风险状态”。
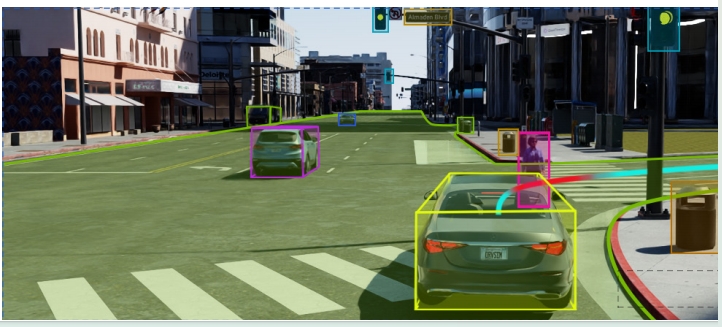
自动驾驶汽车软件开发传统上基于模块化方法,具有用于 物体检测与跟踪、轨迹预测以及路线规划和控制的独立组件。如今,自动驾驶汽车技术已迈入新时代 以大型、统一的 AI 模型为特色,可控制车辆堆栈从感知、规 ——AV 2.0。AV 2.0划到控制的多个环节。与专注于使用多个深度神经网络改进车辆感知能力的 AV1.0 到端驾驶 相比,AV 2.0 ”的方法来推动在动态、真实环境中的决策。 则需要全面的车载智能,借助一种称为“端端到端自动驾驶系统采用统一的模型接收传感器输入并生 成车辆轨迹。这有助于避免过度复杂的流水线,并提供一种更全面的数据驱动方法以应对真实世界的场景
2. 四大安全支柱:技术驱动的防护闭环
支柱1:AI 设计与实施平台
-
硬件:DRIVE AGX Orin/Thor SoC 提供 254-1000 TOPS 算力,支持 L2-L5 全级别自动驾驶,通过冗余设计(如双芯片备份)实现故障容错。
-
软件:DriveOS 操作系统与 CUDA/TensorRT 加速库,支持 20+ DNN 模型并行运行,融合摄像头、雷达、激光雷达多传感器数据。
-
优势:统一架构可扩展升级,车企可基于同一平台开发从辅助驾驶到完全自动驾驶的全系列产品。
参数:
NVIDIA DRIVE AGX Orin™ SoC(片上系统)可提供高达254 TOPS 计算机。它是理想的解决方案,为自动驾驶功能、置信视 (每秒万亿次运算)的性能,是智能车辆的中央图、数字集群以及 AI 驾驶舱提供动力支持。借助可扩展的DRIVE AGX Orin 建、扩展和利用一次开发投资,便可从 产品系列,开发者只需在整个车队中构 L2+ 级系统一路升级至 L5 级全自动驾驶汽车系统DRIVE AGX Thor 计算机,将功能丰富的驾驶舱功能与高度自动化及自动 ™ SoC 是我们的下一代集中式车载驾驶功能整合在一个安全可靠的系统上。这款自动驾 驶处理器采用了我们最新的 CPU 和 GPU 技术,包括NVIDIA Blackwell GPU 能。DRIVE AGX Thor 支持 架构,用于转换器和生成式 8 位浮点数 (FP8),可提供前所 AI 功未有的 1,000 INT8 TOPS/1,000 FP8 TFLOPS/500 FP16TFLOPS 性能,同时降低整体系统成本
支柱2:深度学习基础设施
-
数据工厂:标注 PB 级真实道路数据,结合 Omniverse Replicator 生成合成数据,填补罕见场景(如行人突然闯入)的数据空白。
-
训练优化:DGX 超算集群支持分布式训练,模型迭代效率提升 10 倍以上,确保 DNN 适应全球多样化路况。
支柱3:物理精准传感器仿真
-
仿真工具:Omniverse Cloud Sensor RTX 提供毫米波雷达、激光雷达的高精度建模,支持雨雪、雾霾等复杂天气的传感器性能测试。
-
价值:减少 80% 的实车测试成本,加速算法验证周期。
支柱4:全方位安全与网络安全
-
功能安全(ISO 26262):硬件/软件全链路通过 ASIL D 级认证,确保单点故障不影响系统安全运行。
-
预期功能安全(SOTIF):通过仿真与道路测试验证算法在无故障场景下的可靠性(如感知误判率低于 0.001%)。
-
网络安全(ISO/SAE 21434):多层加密、渗透测试、零日攻击监控,防止恶意入侵导致车辆失控。
安全支柱关系图
AI 平台(硬件+软件)
↓
深度学习(数据+训练)
↓
传感器仿真(场景覆盖)
↓
安全合规(功能+网络)
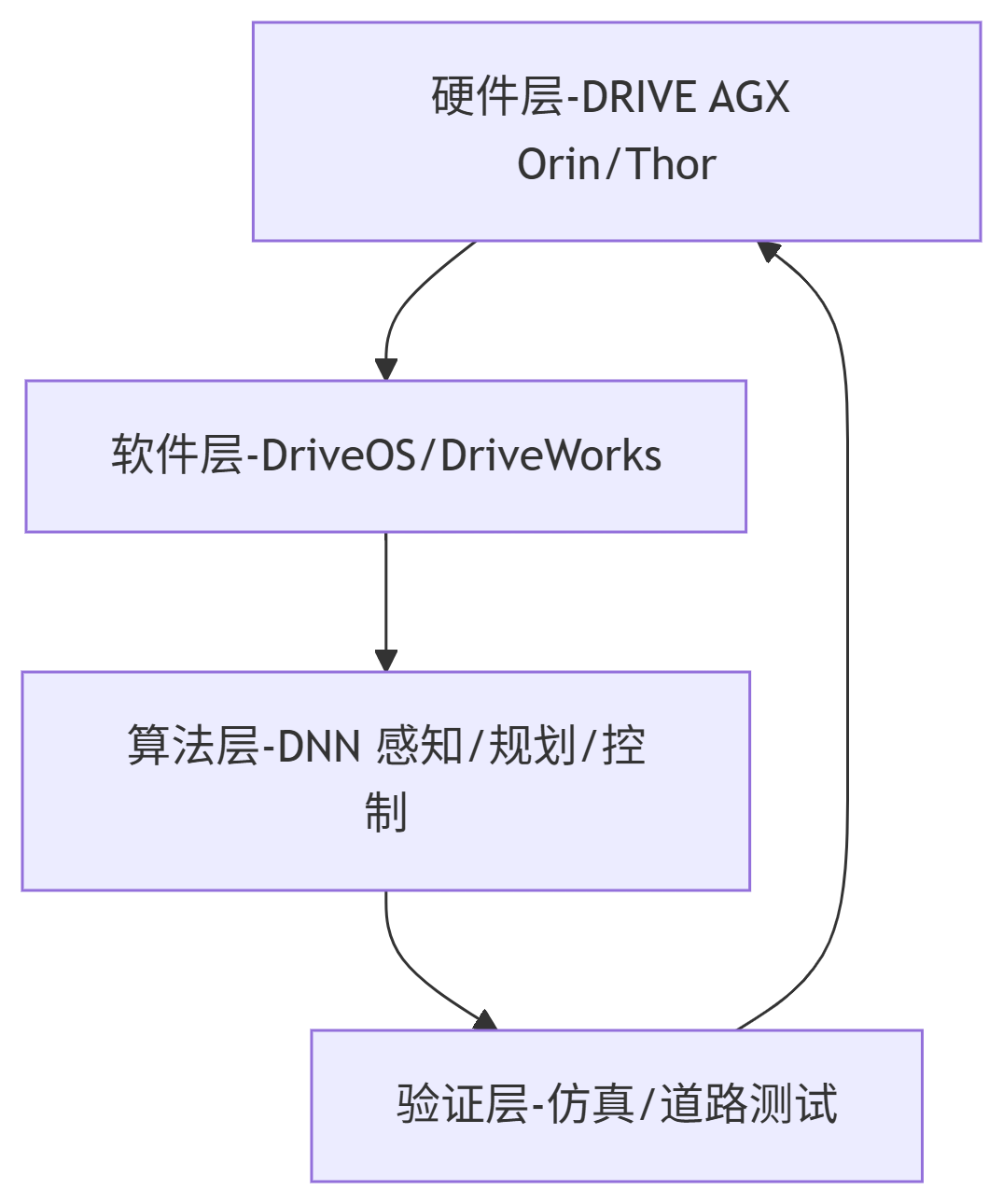
3. 安全架构:从芯片到系统的全栈防护
-
硬件层:DRIVE AGX 芯片集成 CPU/GPU/ASIC 模块,通过物理隔离与冗余设计(如双电源、双通信通道)抵御硬件故障。
-
软件层:DriveOS 提供实时任务调度与内存保护,DriveWorks 中间件实现传感器融合与轨迹规划,DNN 模型通过多帧跟踪与多传感器校验提升感知可靠性。
-
验证层:采用 V 模型开发流程,结合故障树分析(FTA)与失效模式分析(FMEA),确保系统设计无缺陷。
最后
NVIDIA研发出了AV2.0大模型配置全面车载,可实现端到端自动驾驶,通过统一模型接受传感器输入的数据可生成车辆轨迹,提供一种更加全面的数据去驱动方法以模拟真实世界的场景。