系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
例如:第一章 Python 机器学习入门之pandas的使用
提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 系列文章目录
- 前言
- 一、Laplacian边缘检测
- 二、Sobel边缘检测
- 三、Canny边缘检测
- 总结
前言
提示:这里可以添加本文要记录的大概内容:
例如:随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习的基础内容。
一、Laplacian边缘检测
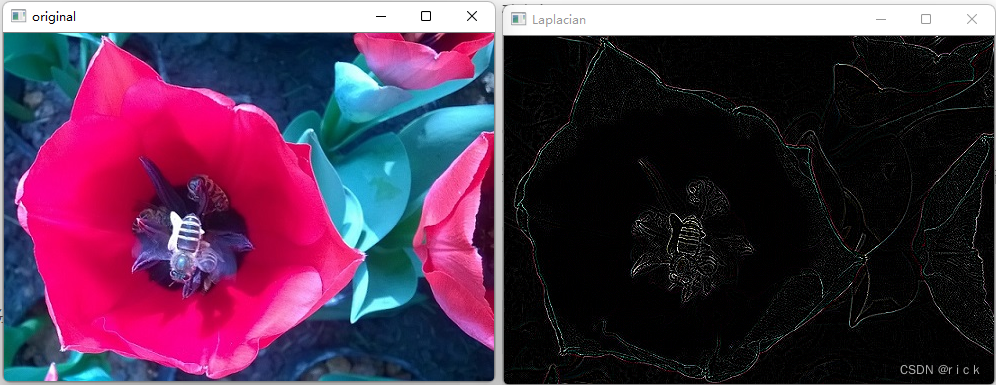
#test5-1.py:拉普拉斯边缘检测
import cv2
img=cv2.imread('bee.jpg') #读取图像
cv2.imshow('original',img) #显示原图像
img2=cv2.Laplacian(img,cv2.CV_8U,ksize=1)
img3=cv2.Laplacian(img,-1,ksize=5)
#边缘检测 ksize ksize是算子的大小,必须为1、3、5、7。默认为1 用于计算二阶导数的滤波器的孔径尺寸,大小必须为正奇数(正奇数才能有中心点)
#cv2.cv_8U,输出图像的深度(数据类型)
#可以使用-1, 与原图像保持一致np.uint8
#数据类型结构: CV_ 【bit_depth】【S/U/F】【C<number_of_channels>】
#CV_8U - 8位无符号整数(0..255)
cv2.imshow('Laplacian2',img2) #显示结果
cv2.imshow('Laplacian3',img3) #显示结果
cv2.waitKey(0)
opencv:边缘检测之Laplacian算子思想及实现
Opencv学习——边缘检测(Laplacian)
二、Sobel边缘检测
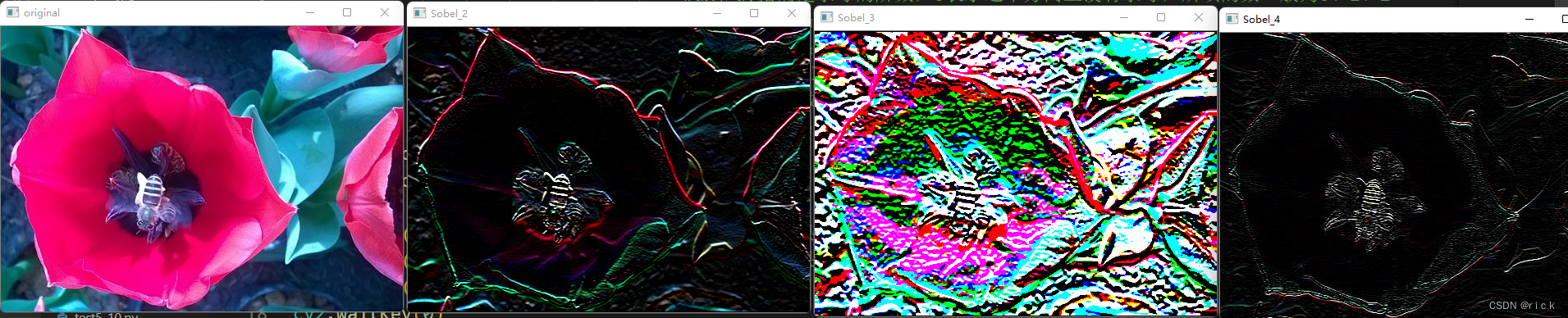
#test5-2.py:Sobel边缘检测
import cv2
img=cv2.imread('bee.jpg') #读取图像
cv2.imshow('original',img) #显示原图像
img2=cv2.Sobel(img,cv2.CV_8U,0,1) #边缘检测
#dx和dy指的是求导的阶数,0表示这个方向上没有求导,所填的数一般为0、1、2
#(0表示不求偏导,1表示1阶偏导,2表示2阶偏导)
# dx >= 0 && dy >= 0 && dx+dy > 0
#ksize是Sobel算子的大小,即卷积核的大小,必须为奇数1、3、5、7。如果ksize=-1,就演变成为3x3的Scharr算子,
# scale是缩放导数的比例常数,默认情况为没有伸缩系数。
# borderType是判断图像边界的模式,这个参数默认值为cv2.BORDER_DEFAULT。
img3=cv2.Sobel(img,cv2.CV_8U,0,1,ksize=7) #sobel内核大小设置为7
img4=cv2.Sobel(img,cv2.CV_8U,0,2) #dx=0 dy=2 表示对y求二阶偏导
cv2.imshow('Sobel_2',img2) #显示结果
cv2.imshow('Sobel_3',img3) #显示结果
cv2.imshow('Sobel_4',img4)
cv2.waitKey(0)
OpenCV——Sobel边缘检测
三、Canny边缘检测
OpenCV——Canny边缘检测(cv2.Canny())
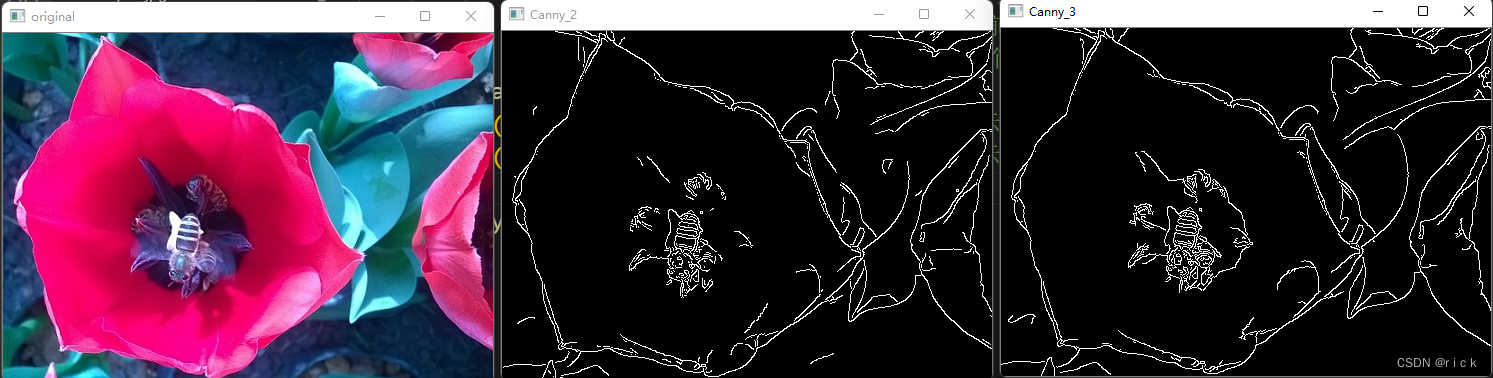
Canny()边缘检测步骤
Canny 边缘检测分为如下几个步骤:
步骤 1:去噪。噪声会影响边缘检测的准确性,因此首先要将噪声过滤掉。
步骤 2:计算梯度的幅度与方向。
步骤 3:非极大值抑制,即适当地让边缘“变瘦”。
步骤 4:确定边缘。使用双阈值算法确定最终的边缘信息。
#test5-3.py:Canny边缘检测
import cv2
img=cv2.imread('bee.jpg') #读取图像
cv2.imshow('original',img) #显示原图像
img2=cv2.Canny(img,200,300) #边缘检测
#threshold1 表示处理过程中的第一个阈值。
#threshold2 表示处理过程中的第二个阈值。
#其中一个为高阈值 maxVal,另一个为低阈值 minVal。
# 根据当前边缘像素的梯度值(指的是梯度幅度,下同)
# 与这两个阈值之间的关系,判断边缘的属性
img3=cv2.Canny(img,100,400)
cv2.imshow('Canny_2',img2) #显示结果
cv2.imshow('Canny_3',img3) #显示结果
cv2.waitKey(0)
OpenCV——Canny边缘检测(cv2.Canny())
总结
提示:这里对文章进行总结:
- Laplacian和Sobel边缘检测:ksize是算子的大小,必须为1、3、5、7。默认为1 用于计算二阶导数的滤波器的孔径尺寸,大小必须为正奇数(正奇数才能有中心点)
- 数据类型结构: CV_ 【bit_depth】【S/U/F】【C<number_of_channels>】CV_8U - 8位无符号整数(0…255)
- Sobel边缘检测中:dx和dy指的是求导的阶数,0表示这个方向上没有求导,所填的数一般为0、1、2(dx >= 0 && dy >= 0 && dx+dy > 0)
- Canny边缘检测中:其中一个为高阈值 maxVal,另一个为低阈值 minVal。