🌞欢迎来到点云的世界
🌈博客主页:卿云阁💌欢迎关注🎉点赞👍收藏⭐️留言📝
🌟本文由卿云阁原创!
✉️希望可以和大家一起完成进阶之路!
🙏作者水平很有限,如果发现错误,请留言轰炸哦!万分感谢!
🍈 准备
点云数据的打开工具
链接:https://pan.baidu.com/s/1LiKZK-Dj6OTY375pRUcR5A?pwd=6j3w
提取码:6j3w一个经典的数据集:
modelnet40_normal_resampled
链接:https://pan.baidu.com/s/1xX9shGGBQzR_sdP_ss_zwQ
提取码:lgjw
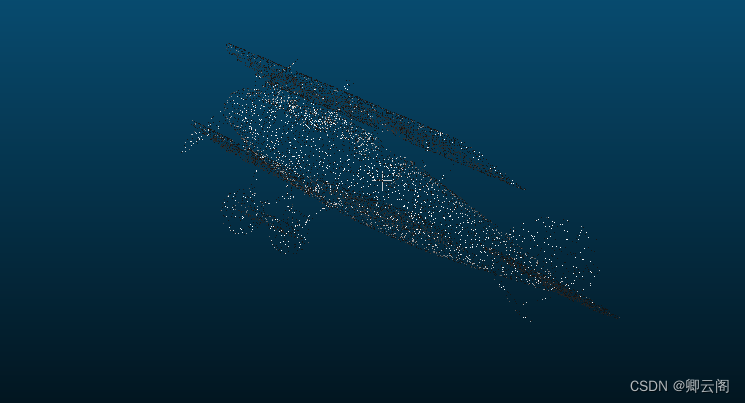
下载完成后,在对于的文件夹下就可以找到我们的数据集,它们都变成了tex文本,每个文件夹下放的都是一个类别。例如,上图打开的就是飞机这个类别的点云数据。每一个txt文件相当于2d图像中的一张图像。
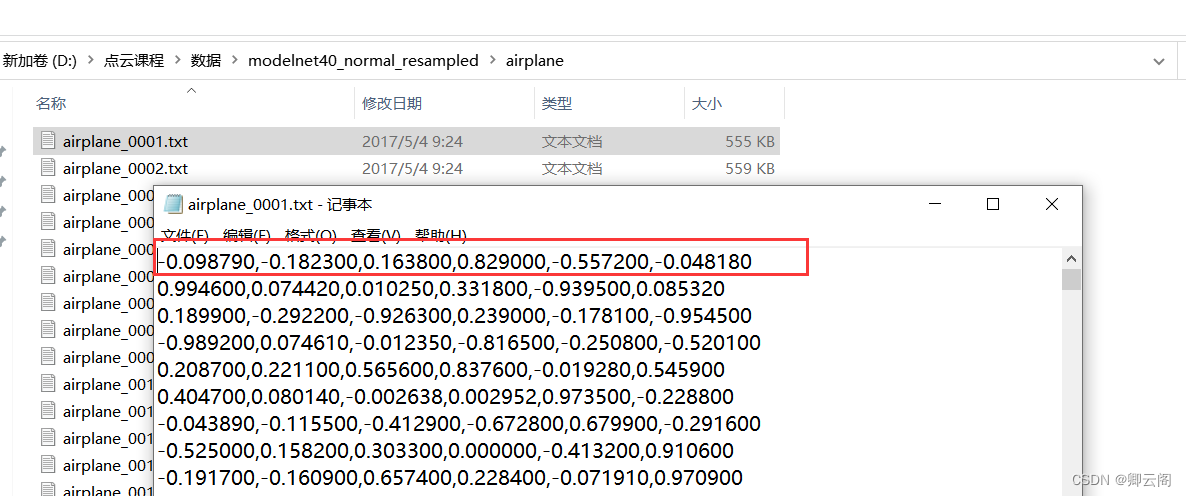
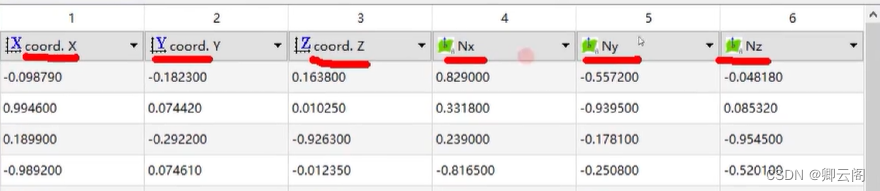
继续打开可以发现它有很多行数据,每行有6个数据。这里的每行数据表示该图像有多少个点组成,例如1万行就是由1万个点组成的,每行数据的前三个是这个点在空间中的xyz坐标,后三个是这个点的颜色信息。至于他们其中为什么有负数,是因为他们都被压缩到-1,1这个区间内了。
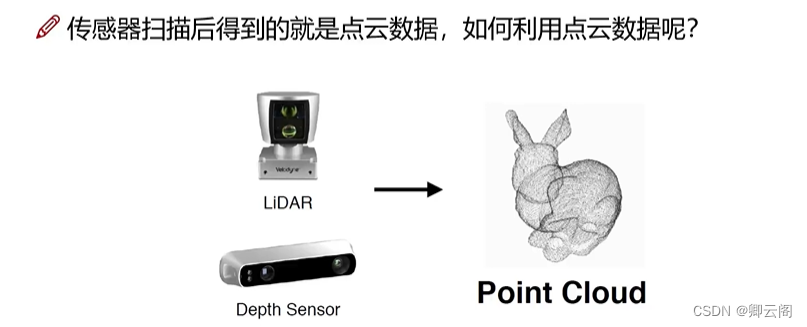
🍈 点云数据
point clouds(点云)
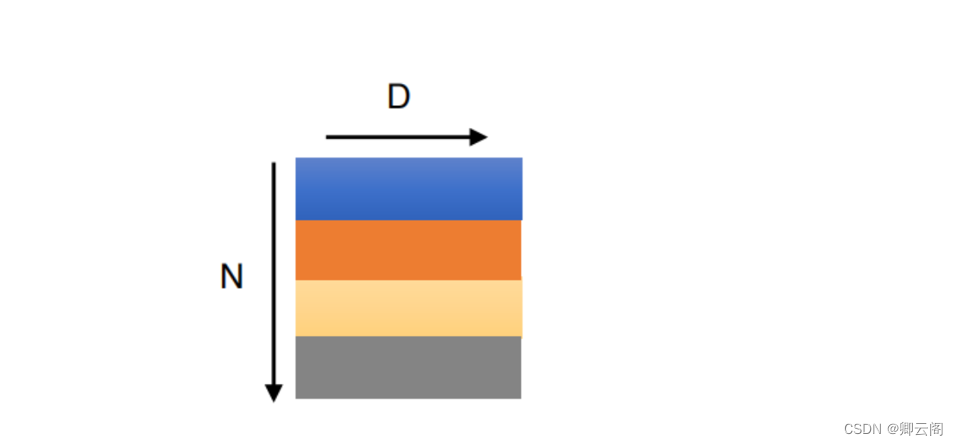
即三维空间中点的集合;由N个D维的点组成,当D=3则可表示为三维坐标点(x,y,z) ,每一点都是由某个(xyz)位置决定的,我们同时可以为其指定其它的属性(如 RGB 颜色)。
RGB-D
RGB-D 是广泛使用的 3D 格式,其图像每个像素都有四个属性:即红(R)、绿(G)、蓝(B)和深度(D)。在一般的基于像素的图像中,我们可以通过(x,y)坐标定位任何像素,分别获得三种颜色属性(R,G,B)。而在 RGB-D 图像中,每个(x,y)坐标将对应于四个属性(深度 D,R,G,B)。点云的表达方式更为简单,一个物体可以表示为一个N*D的矩阵。比如一只兔子是1000个点组成,一个点有6个值,一只兔子可以用[1000*6] 表示。
点云目前的主要存储格式包括:pts、LAS、PCD、.xyz 和. pcap 等
类似这种格式:
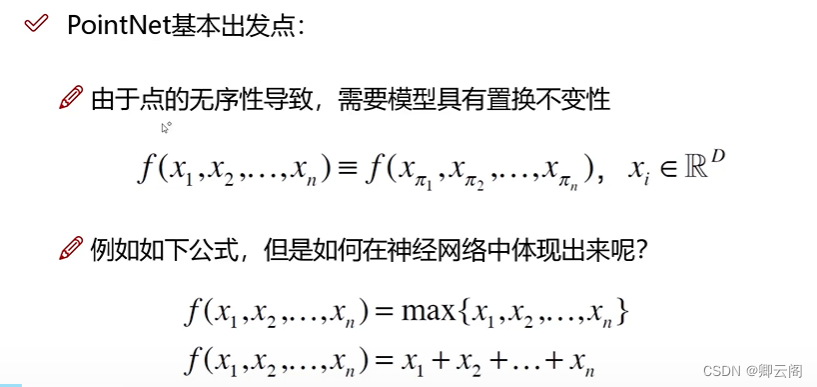
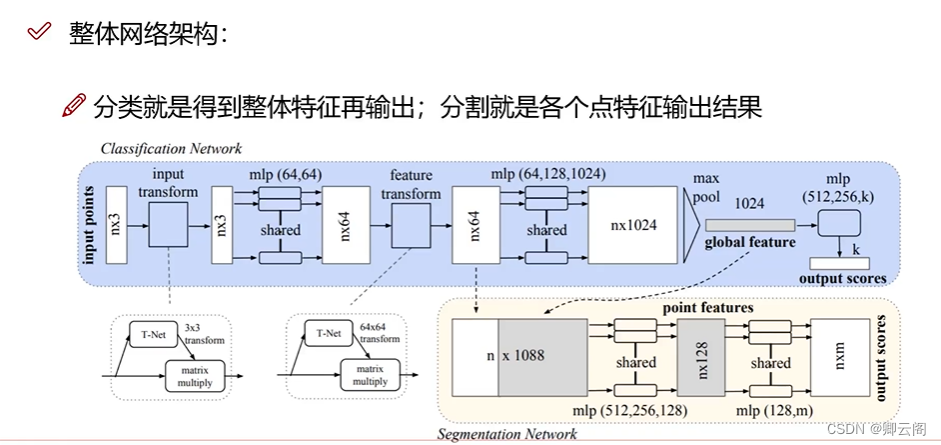
🍉如何提取特征
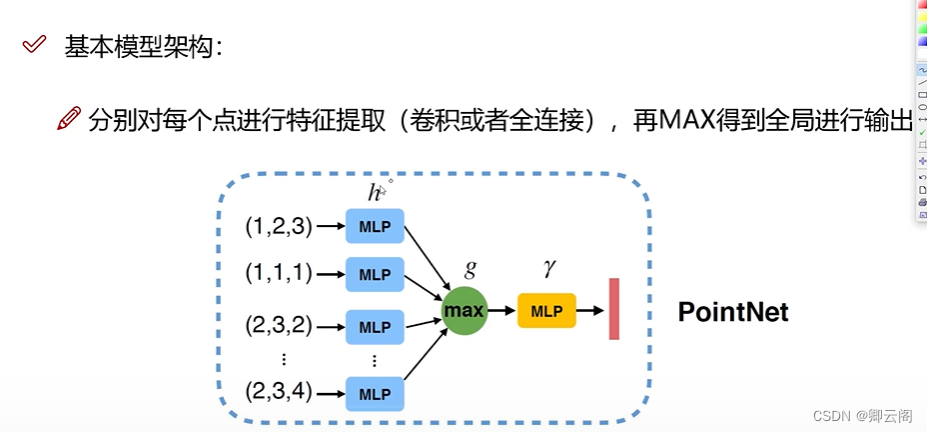
基本出发点(怎么提取特征)
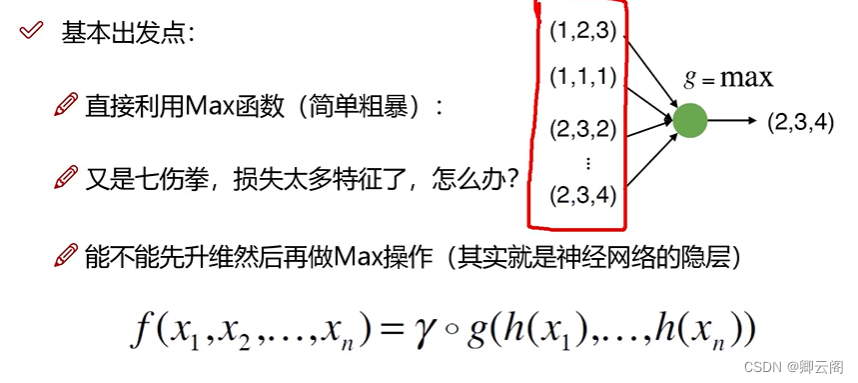
对每一个点做一个升维,比如升到1024维,然后再做max
mlp相当于感知机,相当于全连接层,这样我们就可以完成一个分类任务了。
输入数据,n*3,假设n=2048
第一章:3D点云应用领域分析
news2026/2/13 10:12:44
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/197370.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

力扣(LeetCode)401. 二进制手表(2023.02.03)
二进制手表顶部有 4 个 LED 代表 小时(0-11),底部的 6 个 LED 代表 分钟(0-59)。每个 LED 代表一个 0 或 1,最低位在右侧。
例如,下面的二进制手表读取 “3:25” 。 (图源ÿ…
C语言基础知识(56)
下面的C程序的输出是什么#include<stdio.h>intmain(){int a 0;while(a <printf("HI")){a;}return0;}该代码将打印 3 次HI。 printf()函数将返回它正在打印的字符数,并将其与a进行比较。 由于 printf() 的返回值为 2,HI 将被打印 2 次…
字符函数和字符串函数
🌱博客主页:大寄一场. 🌱系列专栏:C语言学习笔记 😘博客制作不易欢迎各位👍点赞⭐收藏➕关注 目录 前言
一、字符串函数
1. 1 strlen
2. 长度不受限制的字符串函数(操作的是整个字符串&#…
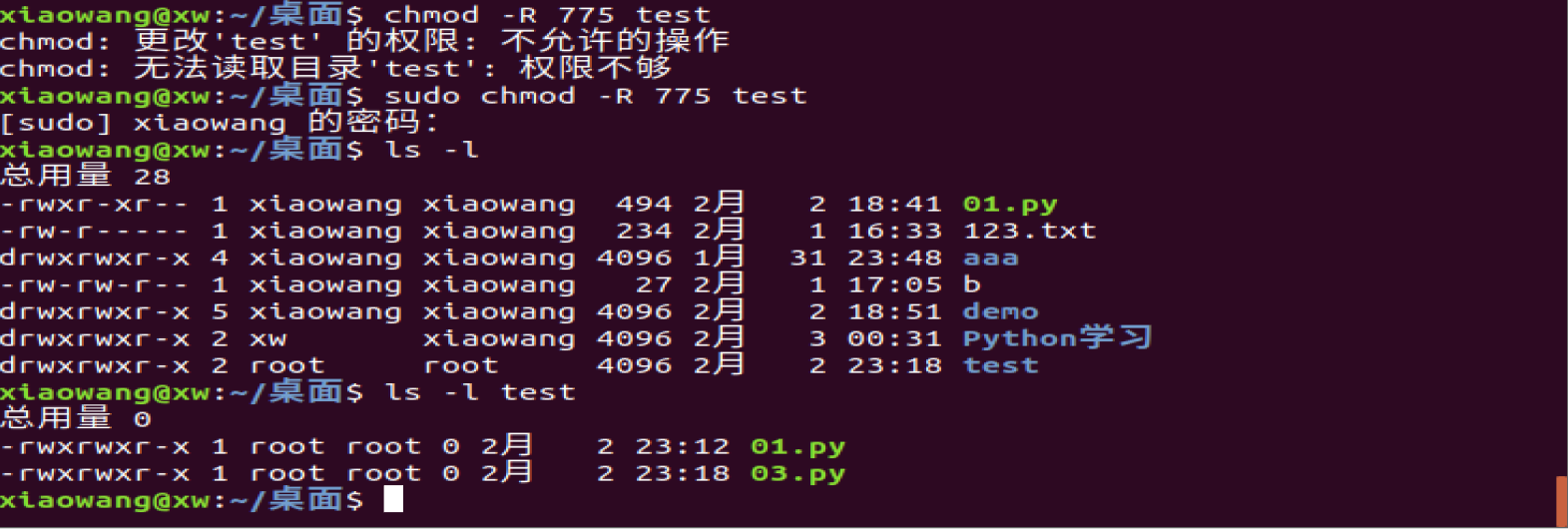
Linux-用户权限相关命令
1.用户和权限的基本概念1.1基本概念用户是Linux系统工作中重要的一环,用户管理包括用户与组管理在Linux系统中,不论是由本机或是远程登录系统,每个系统都必须拥有一个账号,并且对于不同的系统资源拥有不同的使用权限在Linux中&…
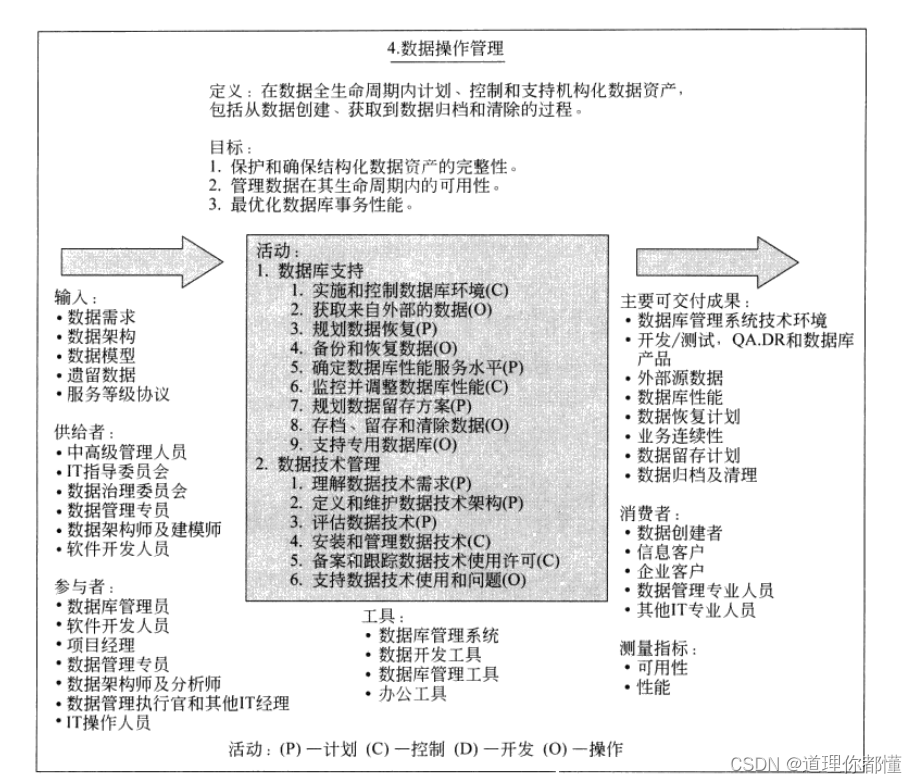
DAMA数据管理知识体系指南之数据操作管理
第6章 数据操作管理
6.1 简介
数据操作管理是结构化数据的开发、维护和支持的活动,使企业数据资源达到最佳的利用价值。数据操作管理包括两项子职能:数据库支持和数据技术管理。 数据操作管理的目标是: (1)保护和确保…
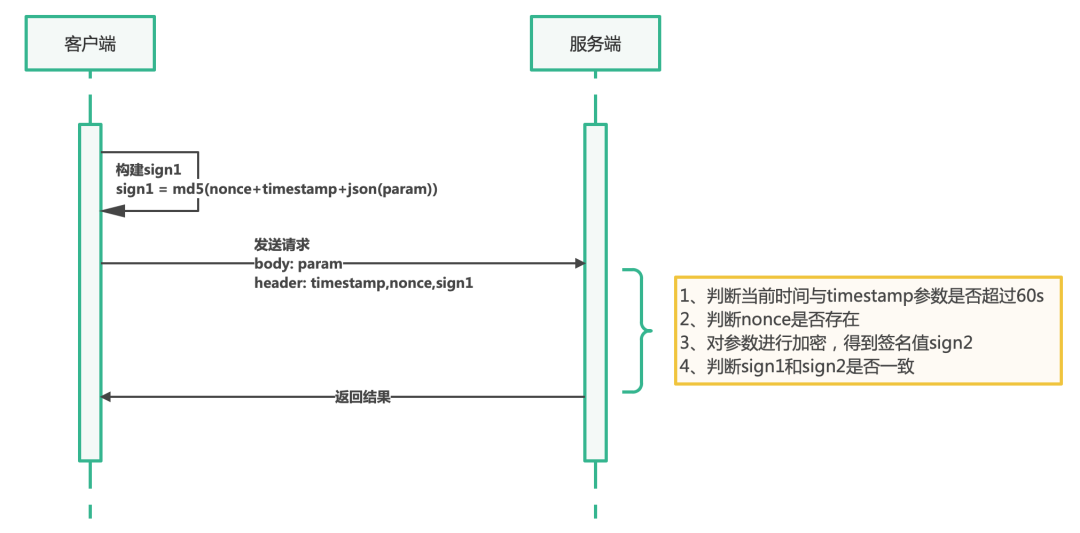
SpringBoot 如何保证接口安全?老鸟们都是这么玩的!
大家好,我是飘渺。 对于互联网来说,只要你系统的接口暴露在外网,就避免不了接口安全问题。如果你的接口在外网裸奔,只要让黑客知道接口的地址和参数就可以调用,那简直就是灾难。 举个例子:你的网站用户注册…
【NS2学习笔记】tcl与c++互相调用/传参
在NS2,做实验的时候,为了能通过循环配合传值实验,一直找不到tcl传参给c的方法,网上的只po出一部分看不懂,只能通过源码自己研究。最后的解决办法就是,模仿源码的操作,以下通过tcl→ex→sat-irid…

Python如何删除列表中的重复元素?
嗨嗨,大家晚上好 ~ 又来给你们分享小妙招啦 在python列表有重复元素时,可以有以下几种方式进行删除 觉得不错的话,赶紧学起来用用吧 ! 直接遍历列表删除
l1 [1, 1, 2, 2, 3, 3, 3, 3, 6, 6, 5, 5, 2, 2]for el in l1:if l1.coun…
Java之动态规划的背包问题
目录 动态规划问题
一:01背包问题
1.问题描述
2.分析问题
3.代码实现(二维数组)
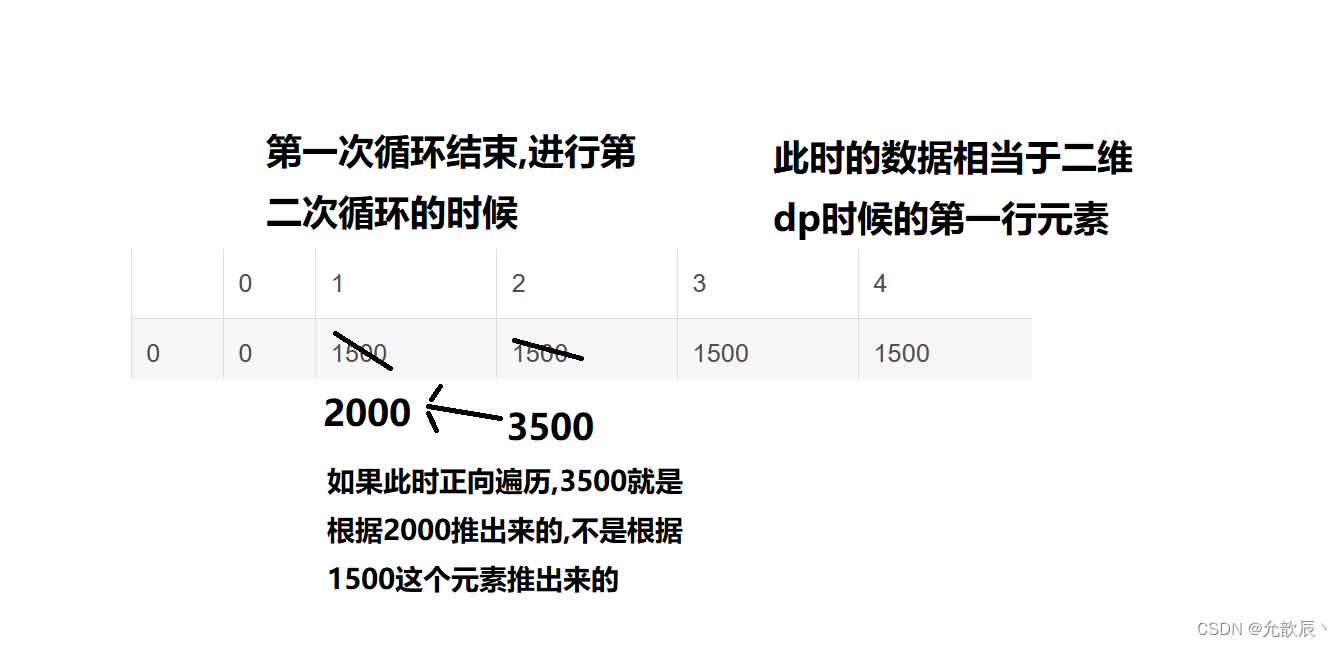
4.滚动数组实现(一维数组)
二:完全背包问题
1.题目描述
2.问题分析
3.代码实现 动态规划问题
动态规划(Dynamic Programming)算法的核心思想是:将大问题划分为小问题,进行解决ÿ…

若依代码生成器-Domain代码生成篇(一)
若依代码生成器的前一段代码的阅读,我们了解了若依代码生成器的一些逻辑,包括通过数据库的information_schema. TABLES查询表信息,以及information_schema. COLUMNS查询指定表的列信息,将其转换到表gen_table与gen_table_column中…
SETR项目运行记录
项目简要介绍
全称为Swin-Transformer-Semantic-Segmentation,看名字我们就知道使用的是transformer,做的是语义分割方面,使用的数据集是Cityscapes。在本文中我们并不对其原理进行解读,只是调试运行该项目。 项目下载地址&#…

2023年深圳CPDA数据分析师认证将于2/25正式开班,快来报名
CPDA数据分析师认证是中国大数据领域有一定权威度的中高端人才认证,它不仅是中国较早大数据专业技术人才认证、更是中国大数据时代先行者,具有广泛的社会认知度和权威性。 无论是地方政府引进人才、公务员报考、各大企业选聘人才,还是招投标加…

C++这么难,为什么我们还要学习C++?
文章目录前言1. 为什么难学2. C的意义3. 什么时候该用C4. 如何学习C5. 学前勉言前言
C 可算是一种声名在外的编程语言了。这个名声有好有坏,从好的方面讲,C 性能非常好,哪个编程语言性能好的话,总忍不住要跟 C 来单挑一下&#x…
![[架构之路-98]:《软件架构设计:程序员向架构师转型必备》-8-确定关键性需求与决定系统架构的因素](https://img-blog.csdnimg.cn/img_convert/393dcbcd972b3b713dea58eb80f7d373.png)
[架构之路-98]:《软件架构设计:程序员向架构师转型必备》-8-确定关键性需求与决定系统架构的因素
第8章 确定关键性需求是什么决定了软件系统的架构?!没有大的争议的是:需求决定了软件系统的架构!那么什么样的需求对软件系统的架构影响最大?8.1 众说纷纭——什么决定了架构8.1.1 用例驱动论:功能性需求用…

算法训练营 day30 回溯算法 组合总和 组合总和II 分割回文串
算法训练营 day30 回溯算法 组合总和 组合总和II 分割回文串
组合总和
39. 组合总和 - 力扣(LeetCode)
给你一个 无重复元素 的整数数组 candidates 和一个目标整数 target ,找出 candidates 中可以使数字和为目标数 target 的 所有 不同组…

基于PHP的图书管理系统
摘要网络技术给生活带来了十分的便利。所以把图书管理与现在网络相结合。在图书馆发展的整个过程中,图书担负着最重要的角色。为满足如今日益复杂的管理需求,各类管理系统程序也在不断改进。本课题所设计的图书管理系统,使用B/S架构ÿ…

C++之this指针
this指针到底是什么?this 实际上是成员函数的一个形参,在调用成员函数时将对象的地址作为实参传递给 this。不过 this 这个形参是隐式的,它并不出现在代码中,而是在编译阶段由编译器默默地将它添加到参数列表中。我们操作一个对象…
Hadoop配置手册1:hadoop环境搭建与测试
Hadoop配置手册1
Date: September 25, 2022 第1章 hadoop环境搭建
1.1 安装Vmware软件
下载地址:https://www.onlinedown.net/soft/45831.htm 运行安装程序,并连续点击下一步安装 输入密钥,启动程序 详细参考:https://blog.csd…

2023年19个数学建模竞赛重磅来袭!!!
更新时间:2022年2月3日
本人的团队全是计算机的研究生,从本科到研究生有丰富的打比赛和数模的经验,有需要指导的,请私信我
相关链接
(1)【数学建模】2022年整年所有数学建模竞赛时间表
(2&a…