创新打造电力巡检机器人用计算机产品方案
目前,智能电网建设和增强供电可靠性已上升到国家战略,使得我国基数庞大的电力设备的监测、运维等需求充分释放,变电站/配电站巡检机器人市场需求高涨。
1、电力巡检机器人的市场优势
电力系统智能巡检是保障电力设备健康运行,保障供电安全的必要手段。随着国内大容量、超高压、长距离输电工程的不断开发和落地,变电站/配电站传统“人工巡检+检测仪器定点检查”的方式存在的检测质量差、劳动强度高、运维效率低等缺陷日益暴露,加上智能电网建设对自动化、智能化设备的投资持续增长,巡检机器人系统凭借智能可控、实时监测、无人作业、不受天气因素影响等优点,逐渐成为电力系统智能巡检的主力,市场空间广阔。

目前,智能化巡检机器人已在国内多地电力系统中投入使用。不管是寒冬酷暑,亦或者高原山地,我们都可以看到巡检机器人在变电站/配电站等场景中对电力设备进行着全面的巡视、表计抄录等工作,在发现设备潜伏性故障时通过大数据分析给出较为精准的故障预警,并实时反馈给监控人员,由此提高设备检修的针对性与处理效率,为确保电力系统的稳定安全运行提供有力保障。
由此,认为电力巡检机器人的核心功能主要表现在自主移动、控制与驱动、定位导航、信息数据采集与处理、大数据分析等方面。而这些功能的实现,都离不开中枢计算机系统硬件的关键支撑。
2、电力巡检机器人产品方案
从电力巡检机器人系统高安全性、高稳定性、高智能化程度等需求出发,依托自身强大的研发平台,积极引入人工智能、大数据等前沿技术赋能工控产品创新,打造的电力巡检机器人用计算机产品方案不仅专业可靠、性能优异,且系统完善。
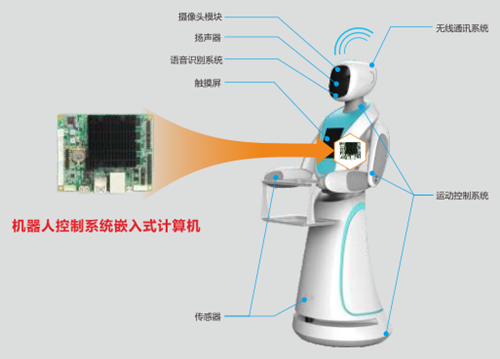
智能机器人系统框图
可提供适用于电力巡检机器人系统中的多样化计算机板卡方案、嵌入式准系统方案、工业整机方案以及超高清网络摄像机等硬件。产品的主要技术特性如下:
1. 产品支持Intel 赛扬、奔腾、酷睿系列CPU,支持瑞芯微、飞思卡尔、海思、飞腾系列CPU,支持电力巡检机器人系统根据不同的芯片组平台进行差异化功能扩展;
2. 集成高效处理内核,板载高速内存,具有出色的信息数据处理与存储能力;
3. 丰富的I/O功能接口设计,支持HDMI / VGA / LVDS多种显示,支持高分辨率,支持千兆以太网/WIFI/3G/4G网络,支持5W双通道功放;
4. 扩展性强,支持PCIE网卡、显卡、采集卡等多种扩展,支持Android/Linux等操作系统;
5. 严格按照工业级标准打造,功耗低、抗震、防尘、防水、支持宽温作业,电磁兼容性良好,稳定可靠;
除此之外,支持客户定制,具有出色的自主创新能力。公司打造的X86架构和ARM架构两条成熟的嵌入式计算机产品供应链,可满足大多数行业客户的实际应用所需。
工控主板的主要技术特性如下:
支持Rockchip RK3588处理器,内置6 TOPs算力的NPU,支持 INT4/INT8/INT16/FP16 混合运算,算力强大;
支持4~16GB LPDDR4/LPDDR4X内存,支持1*SATA3.0高速存储,以及1*eMMC(最大支持128GB)、1*TF、1*M.2 NVME SSD扩展存储容量;
集成Mali-G610 GPU,支持1*双通道LVDS、2*HDMI TX、1*HDMI RX、1*DP TX、2*MIPI TX/RX显示输出,满足8K超高清分辨率显示和多屏异显的产品需求;
支持2*LAN、支持板载Wifi/BT(WIFI6/BT5),以及1*M.2 B KEY接入5G)模块和1*Mini-PCIe扩展4G模块实现有线/无线网络通讯;
支持4*USB3.0、4*USB2.0实现多机联,以及4*RS-232、2*RS-485、1*DEBUG实现更高速率的网络传输;
支持1*Headphone、1*MIC-IN、2*5W AMP、2*CAN、2*MIPI DSI/CSI、1*I2C、1*POWER、1*SYS指示灯、1*Return Key、1*RST Key、1*JFP实现多重扩展;
支持看门狗功能,兼容支持Android、Linux操作系统;
支持单电源DC 12V供电,满足0℃~60℃宽温作业要求;
尺寸为185mm x 125mm,功能高集成,易于部署。

rk3588部署yolov5
总体流程:
YOLOv5 训练得到pt文件
pt-->onnx
onnx-->rknn
使用rknn进行推理
一、YOLOv5 训练得到pt文件:
去瑞芯微官网下载他们的YOLOv5,不要用YOLOv5官网的。

用这里面的train.py训练,训练方法和官网一样,这里就不多说了,最后得到一个best.pt权重文件。
有几个地方要注意:
numpy改成1.22版本,否则会报一个numpy.int找不到的错
pillow改成9.5版本
opencv-python改成改成与python对应的版本
如果要使用GPU加速的话,需要安装GPU版本的torch,cuda和cudnn,自己电脑的cuda版本可以在cmd中输入nvidia-smi查看。
CUDA安装地址:CUDA
cudnn安装地址:cudnn
torch安装地址:PyTorch
等这些都安装完成后,再安装requirements.txt中的包。安装成功后,可以输入
import torch
print(torch.cuda.is_available())
输出为True则GPU版的安装成功
如果不小心先安装了requirements,需要在更换版本之前删除掉之前安装的版本,torch要特别注意删掉torch、torchvision、torchaudio三个包,可以通过pip list查看
二、pt文件转化onnx文件
在yolov5文件夹中,执行export.py文件:(onnx需要自己安装,记住安装的版本,后面要用)














![P2048 [NOI2010] 超级钢琴(纪念紫题)](https://i-blog.csdnimg.cn/direct/b714a779fc7642109b7609842f063043.png)


![Python 【机器学习】 进阶 之 【实战案例】房价数据中位数分析 [ 项目介绍 ] [ 获取数据 ] [ 创建测试集 ]| 1/3(含分析过程)](https://i-blog.csdnimg.cn/direct/ddd12dffa79646d3adb51a9486c84992.png)