文章目录
- 中断
- 函数解析
- FreeRTOS中断使用示例
中断
大家看到中断后,有没有想到一个名词——异常呢?若大家想到了,但是记不起相关概念;或者是,大家没想到这个名词,没关系, 下面小编就给大家伙讲讲中断、异常相关知识。
异常
异常,是指任何使CPU执行程序时脱离正常运行状态转而跑飞的任何事件,若不及时处理,系统可能会面临崩溃危机。
异常,可分为同步异常与异步异常。由内部事件,如零除引起的算术异常等一系列处理器指令故障引起的事件,称之为同步异常;而异步异常,主要只外部硬件装置产生的异常,若按键按下后产生的事件。
同步异常与异步异常在程序执行上的区别是:当一个同步异常产生后,系统必须立刻处理该异常,而不能继续执行原程序;但是当异步异常发生后,系统可以缓处理或者是忽略不处理。其本质上的区别,个人认为还得是因为异常的来源不同。
中断
中断,属于异步异常。用一个形象的现象来讲解中断:某天,小明(CPU)正在酣畅淋漓地打游戏(主程序),突然,其女友过来找他有急事(中断事件),这时小明是不是得优先处理女友的事情(中断服务),之后才能继续玩游戏(恢复主程序)。
通过中断机制,CUP可以实现:当外设不需要CPU处理时,CPU可以干一些其他的事情,如轮询任务、动态内存管理等等;而不需要持续地查询外设状态,一旦外设状态符合条件,就使用中断机制启动特定任务即可。
中断相关的硬件可划分为三类:
- 外设:当外设请求CPU时,会产生一个中断信号,请求中断;
- 中断控制器:中断控制器是CPU外设之一,其既能接收其他外设的中断信号,自己也能够发出中断信号给CPU。通过该外设,可以实现对中断源的优先级、触发方式、打开、关闭等操作进行设置。
- CPU:CPU能够响应中断请求,中断当前程序,进而执行中断服务程序。NVIC(中断控制器)最多支持240个中断,每个中断最多支持256个优先级。
中断处理过程
某中断发送中断请求后,中断处理需要经过以下过程:
- 步骤一:中断响应(由硬件自动化完成);在此过程中主要任务为:保护现场与找到中断服务程序地址。
- 步骤二:执行中断服务程序(由用户编写);中断服务程序没有参数与返回值且要求尽量简短,其调用不是由用户完成,而是由硬件自动调用。
- 步骤三:中断返回(由硬件自动实现);此过程主要为恢复现场。
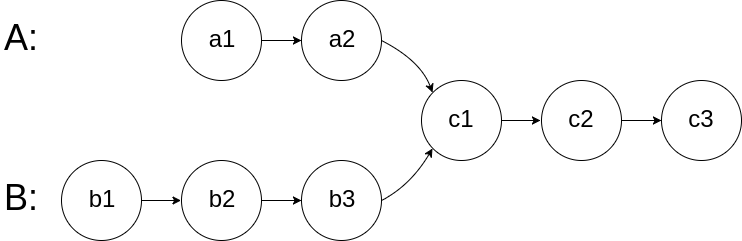
就拿上述小明女友让小明处理某事作为中断处理过程的示例,则其示意图可为下图:
 中断处理示意图
中断处理示意图
中断机制的弊端
尽管使用中断能够提高系统的实时性,但是使用中断也存在一定的弊端:
- 中断会增加程序执行的不确定性与时间长度;
- 中断会增加栈空间;
- 中断会抢占正在使用的资源;
FreeRTOS里中断管理支持:
- 开/关中断;
- 恢复中断;
- 中断使能;
- 中断屏蔽;
- 设置中断优先级
函数解析
FreeRTOS中,实际上是没有中断的,中断还是由硬件产生。以STM32为例,中断请求的响应过程还是由STM32的中断服务函数完成,而FreeRTOS在其中的作用可以说成是唤醒某个阻塞或就绪任务。
也就是说,在硬件STM32的中断函数中,需要使用信号量或事件等完成中断与FreeRTOS系统任务的通信,实现通过中断函数来唤醒一次或多次FreeRTOS系统任务。
与中断管理相关的函数有:
- portDISABLE_INTERRUPTS:中断暂停函数;
函数
portDISABLE_INTERRUPTS()实际上还是使用声明重新定的一个函数:
#define portDISABLE_INTERRUPTS() vPortRaiseBASEPRI()
函数vPortRaiseBASEPRI()的实现则是通过汇编完成的。
- portENABLE_INTERRUPTS :使能中断函数;
与中断暂停函数一样,函数
portENABLE_INTERRUPTS()实际上还是使用声明重新定的一个函数:
#define portENABLE_INTERRUPTS() vPortSetBASEPRI(0)
函数vPortRaiseBASEPRI()也是通过汇编完成的。
ARM汇编指令
msr
MSR指令,存储通用寄存器的值到特殊功能寄存器。
指令格式为:msr spec_reg, Rm,spec_reg表示特殊寄存器,Rm表示通用寄存器。
isb
指令同步隔离(与流水线、 MPU有关)。最严格:它会清洗流水线,以保证所有它前面的指令都执行完毕之后,才执行它后面的指令。
dsb
数据同步隔离(与流水线、 MPU 和 cache等有关),较为严格: 仅当所有在它前面的存储器访问都执行完毕后,才执行它在后面的指令(亦即任何指令都要等待)。
basepri
表示常规异常的优先级阈值寄存器;
FreeRTOS中断使用示例
示例的主要目的:是使用中断以及事件组完成基于FreeRTOS实时操作系统的中断处理功能。
示例中详细任务为:
1.创建一个事件组以及两个个FreeRTOS任务,并且将是否创建成功显示到LCD屏上;
2.初始化两个按键的外部中断,并且在回调函数中完成事件组的触发功能;
3.在FreeRTOS任务1中,接收两个事件,并完成预设功能——其中一个事件触发一次翻转一次LED状态;另一个事件触发后记录其触发次数,并且显示在LCD屏中。
4.FreeRTOS任务2需要完成的功能有:实现两个按键中任意一个按键按下后反转一个LED灯状态,并且要求按键消抖。
示例代码
// 声明事件
#define EVENT7 (0x01 << 6)
#define EVENT8 (0x01 << 7)
//任务控制权柄
TaskHandle_t xHandleTsak[4];
// 事件控制权柄
EventGroupHandle_t myxEventGroupHandle_t = NULL;
int main(void)
{
//存储创建任务的返回值
BaseType_t xReturn[5] ;
//LCD显示
char temp[30] = "task fail:";
//动态创建任务
xReturn[0] = xTaskCreate(
(TaskFunction_t )eventTask2,(const char *)"task1",
(uint16_t)128,(void*) NULL,1,&xHandleTsak[0]);
if (pdPASS != xReturn[0])
strcat(temp,"1");
xReturn[2] = xTaskCreate(
(TaskFunction_t )eventTask4,(const char *)"task3",
(uint16_t)128,(void*) NULL,1,&xHandleTsak[2]);
if (pdPASS != xReturn[2])
strcat(temp,"3");
if(strlen(temp) == 10)
sprintf(temp,"task suc");
// 创建事件
myxEventGroupHandle_t = xEventGroupCreate();
if(myxEventGroupHandle_t == 0)
strcat(temp,"event fail");
else
strcat(temp,"event suc");
// 显示任务 事件是否创建成功
LCD_DisplayStringLine(Line3,(uint8_t*)temp);
changeAllLedByStateNumber(OFF);
// 启动调度
vTaskStartScheduler();
return 0;
}
/********************************************
* 函数功能:事件测试函数2
* 函数参数:无
* 函数返回值:无
********************************************/
void eventTask2(void)
{
// 设置变量接收事件
EventBits_t r_event;
// 保存LED的状态
int ledState[] = {0,0,0,0,0,0,0};
// 记录LED的位置
uint16_t ledLocation[] = {LED1,LED2,LED3,LED4,LED5,LED6,LED7};
// 记录EVENT8触发次数
uint16_t eventTriggerCount = 0;
// 保存显示到LCD中的数据
char temp[30];
// 用于循环
int i = 0;
while(1)
{
//阻塞等待8个事件中任意一个事件
r_event = xEventGroupWaitBits(myxEventGroupHandle_t,EVENT7|EVENT8,
pdTRUE,pdFALSE,portMAX_DELAY);
//判断事件类型
if((r_event&EVENT7) !=0)
++ledState[6];
else if((r_event&EVENT8) !=0)
{
sprintf(temp," Event8 count:%d",++eventTriggerCount);
LCD_DisplayStringLine(Line4,(uint8_t*)temp);
changeAllLedByStateNumber(OFF);
}
// 设置每个LED灯状态
for(i=0;i<7;++i)
changeLedStateByLocation(ledLocation[i],ledState[i]%2);
portDISABLE_INTERRUPTS();
}
}
/********************************************
* 函数功能:事件测试函数4
* 函数参数:无
* 函数返回值:无
********************************************/
void eventTask4(void)
{
// 记录按键按下的位置 按键触发次数
unsigned char keyNumber = 0;
// 记录按键状态 0-按键空闲状态 1-按键按下状态 2-按键松开状态
int state = 0;
// 保存系统时间
static portTickType myPreviousWakeTime;
// 保存阻塞时间
const volatile TickType_t xDelay10ms = pdMS_TO_TICKS( 50UL );
// 获取当前时间
myPreviousWakeTime = xTaskGetTickCount();
while(1)
{
// 按键第一次按下 消抖
if( state == 0 )
{
keyNumber = scanKeyNoTime();
// 只有按键按下后才跳转
if(keyNumber != 0)
{
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2, GPIO_PIN_SET);
state = 1;
}
}
// 按键真正按下状态
if( state == 1 )
{
/* 读取按键是否按下 若没按下则跳转到状态1
否则就执行按键服务函数 并且跳转到状态2*/
keyNumber = scanKeyNoTime();
if(keyNumber == 0)
state = 0;
else
{
if(keyNumber == 3 )
rollbackLedByLocation(LED3);
if(keyNumber == 4 )
rollbackLedByLocation(LED4);
state = 2;
}
}
// 按键松开状态
if( state == 2 )
{
keyNumber = scanKeyNoTime();
// 判断按键是否松开 只有按键松开 才跳转到状态0
if(keyNumber == 0)
state = 0;
}
xTaskDelayUntil(&myPreviousWakeTime,xDelay10ms);
}
}
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
// 记录当前某些信息
BaseType_t pxHigherPriorityTaskWoken;
uint32_t ulReturn;
uint16_t event;
/* 进入临界段,临界段可以嵌套 */
ulReturn = taskENTER_CRITICAL_FROM_ISR();
// 读取对应按键的状态
GPIO_PinState pinState = HAL_GPIO_ReadPin( GPIOB,GPIO_Pin );
if(pinState == GPIO_PIN_RESET )
{
// 判断中断位置
if(GPIO_Pin == GPIO_PIN_0 )
{
rollbackLedByLocation(LED1);
event = EVENT7;
}
else if(GPIO_Pin == GPIO_PIN_1 )
{
rollbackLedByLocation(LED2);
event = EVENT8;
}
// 发送事件请求
xEventGroupSetBitsFromISR(myxEventGroupHandle_t,event,
&pxHigherPriorityTaskWoken);
// 如果需要就切换任务
portYIELD_FROM_ISR(pxHigherPriorityTaskWoken);
}
/* 退出临界段 */
taskEXIT_CRITICAL_FROM_ISR( ulReturn );
}
上述测试中,STM32负责中断响应以及“虚假”中断服务函数执行,而FReeRTOS的任务eventTask2()才是真正的中断服务函数。“虚假”的中断服务函数与“真正的”中断服务函数间是通过事件来完成中断与任务通信过程的。
因此,在上述函数中,很明显的可以知道:eventTask2()才是真正的中断服务函数,因为每次外部中断触发后,任务eventTask2()也都会触发。
其次,中断函数需要精简,遵循快进快出的原则。而在上述测试中,“虚假”中断服务函数HAL_GPIO_EXTI_Callback()还是没有做到这一点,应该要将函数内部翻转LED状态的函数删除,只留下唤醒事件的必要代码以及按键相关代码即可。
至于小编为什么要这样子写呢?🤔一开始是为了测试外部中断是否可用,后面就懒得删了,毕竟还是可以观察到外部中断是否触发以及此时是否应该触发事件。😅
至于函数eventTask4()中按键部分,小编是采用FreeRTOS的绝对延时进制以及状态机完成消抖。(状态机写的比较烂,大家将就将就吧!🤣🤣🤣)
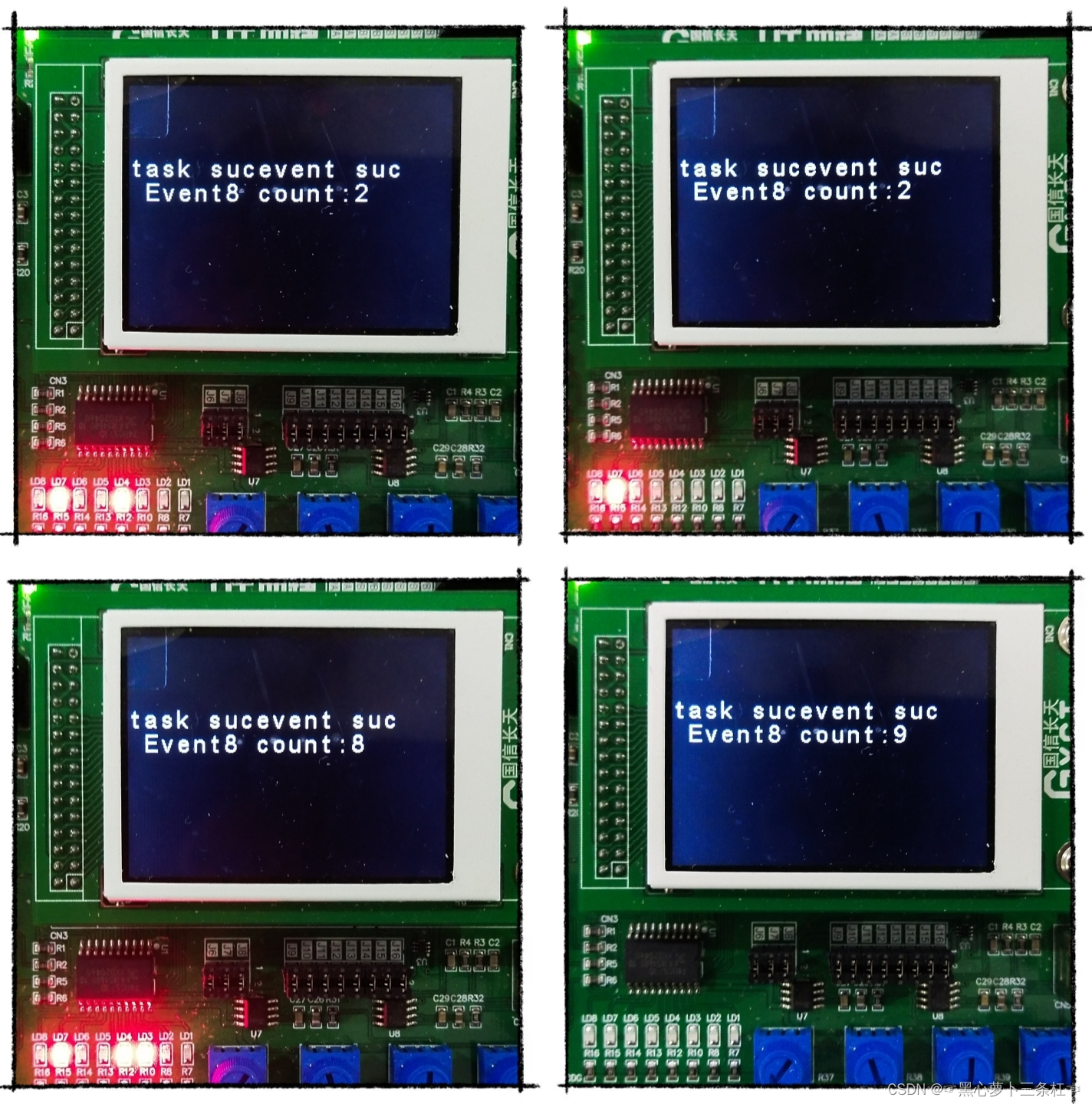
结果
小编也有其他的一些相关文章,欢迎各位看官点击观看😉😉😉
- 【FreeRTOS】详细讲解FreeRTOS中任务管理并通过示例讲述其用法
- 【FreeRTOS】详细讲解FreeRTOS的软件定时器及通过示例讲述其用法
- 【FreeRTOS】详细讲解FreeRTOS中消息队列并通过示例讲述其用法
- 【FreeRTOS】详细讲解FreeRTOS中事件(event)并通过具体示例讲述其用法
最后 ,欢迎大家留言或私信交流,咱们共同进步!😁😁😁