车身域控制器作为车身主要部件的控制大脑,需要经过严苛的测试,常见的测试方式是通过搭建硬件在环测试系统实现的,测试原理是通过仿真控制器外围的传感器和执行器,实现车身域控制器的闭环仿真和测试。小怿基于国际一流的测试设备提供商Vector展开介绍一种基于Vector VT系统的桌面式测试方案,具体依照以下章节展开:
目录
1.车身域功能介绍
2.IO板卡分配讲解
3.测试解决方案
4.vTESTstudio脚本开发示例
5.小结
01 车身域功能介绍
车身域控制器是车身电气系统中的重要部分,它的主要功能包括以下几个部分:
· 灯光功能:转向灯,远光灯,近光灯,位置灯,氛围灯等
· IO类型常见有:HSD/LSD输出,模拟输出,开关输入,模拟输入
· 雨刮功能:前雨刮,后雨刮,前后洗涤
· IO类型常见有:模拟输出,模拟输入
· 门窗控制:门开关控制,尾门控制,车窗控制
· IO类型常见有:开关输入,模拟输出,数字PWM输入
· 后视镜控制:后视镜折叠/展开,后视镜位置调节,后视镜加热
· IO类型常见有:模拟输出,HSD输出
· 座椅控制:座椅位置调节,座椅加热与通风,座椅按摩
· IO类型常见有:模拟输出,HSD输出
· PEPS:无钥匙进入,无钥匙启动,迎宾功能,整车电源管理
· IO类型常见有:HSD/LSD输出,模拟输出,开关输入
· 空调功能:制冷制热,压缩机开启关闭,除雾,内外循环等
· IO类型常见有:模拟输入,模拟输出,PWM输出
02 IO板卡分配讲解
ECU是如何通过VT板卡接入我们的测试系统的呢?下面具体看一下。
——VT板卡分配——
由第一部分我们可以知道控制器IO的常见类型分为输出和输入两种,分别是:开关量输出,模拟量输出,输出H桥控制电机驱动,输出PWM,输出HSD/LSD;PWM输入,开关电阻输入,HSD/LSD输入。
通过板卡可以实现输入仿真和输出测量,实现ECU IO通道的闭环,Vector提供了丰富的VT板卡,匹配车身域需求的各种IO通道,例如:当我们ECU输出端连接的是电机负载,输出模拟电压控制,测试时可以选择VT1004A,将VT1004A的输入端接入ECU的输出端可以电机负载模拟,同时VT1004A 提供的真实接线端可以接入原始电机负载,便于在测试过程中实现真实负载和模拟负载的自动切换。
IO通道与VT板卡的对应关系如下:


——VT板卡连接——
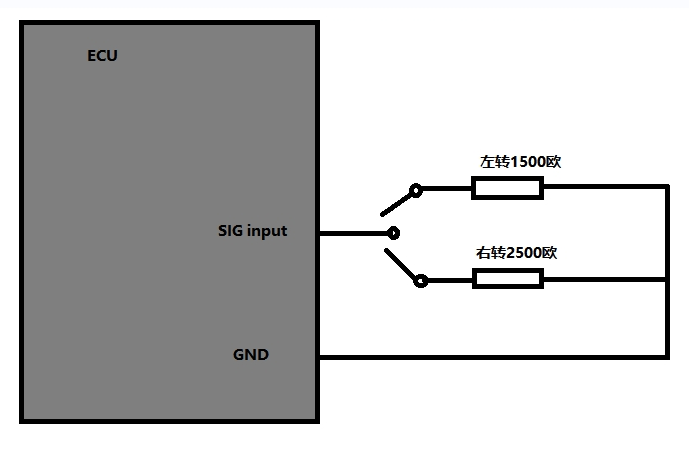
下图所示为转向灯输入信号电路。
由电路原理图可知,当不同的开关闭合后,ECU 信号输入端接入不同阻值的电阻, VT2004A仿真模块可以提供1 Ω … 250 kΩ 的电阻输出,因此选用此板卡。
ECU控制电路图:
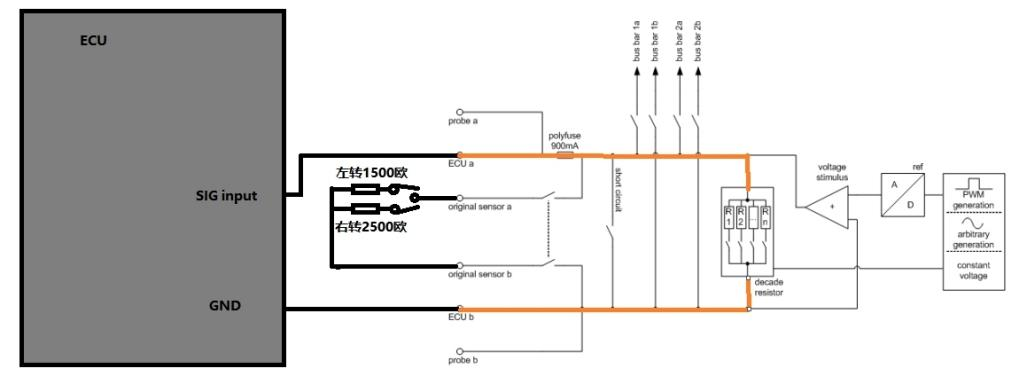
下面介绍真实负载和模拟负载同时接入电路的连接方式,如下图:
○ 使用仿真负载
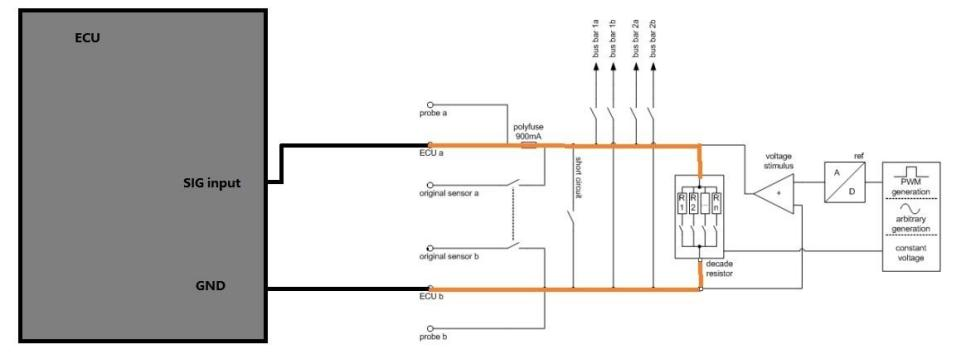
○ 使用真实负载时,断开仿真负载,将原始负载通道开关闭合
03 测试解决方案
基于Vector VT系统的测试解决方案主要包括:Vector VT系统,台架集成,脚本开发。接下来我们详细介绍每个部分。
——VECTOR VT系统——
针对车身域控制器的这些主要功能测试,我们可以用下面简单的逻辑框图,理解一下基于Vector VT系统的组成与搭建。

下面我们详细的描述下各个部分的组成:
PC:首先电脑需要安装CANoe相关软件,测试时在TestModule下添加测试执行文件,可实现自动化测试,执行结束后自动生成报告。和被测件通信时,通过Trace窗口可以清楚的看到接收和发送的报文,通过VT系统可以观察到IO的电平变化,当然也可以模拟实车的动画,例如雨刮动作,按键/转向灯灯亮灯灭等等。
VT System
· VT系统是一个模块化硬件系统,用于连接ECU的I/O线路以进行测试。
· VT系统记录ECU输出线的电压,并可以将其用于CANoe中的测试用例中。传感器和执行器在VT模块上可以进行电子模拟,例如电子负载或十进制电阻器。原始传感器和执行器也可以通过VT模块接入测试电路。继电器模块可用于产生各种线路故障和短路。
——车身域测试台架——
为了实现自动化测试,需要将被测单元与测试系统集成,请看如下渲染图;
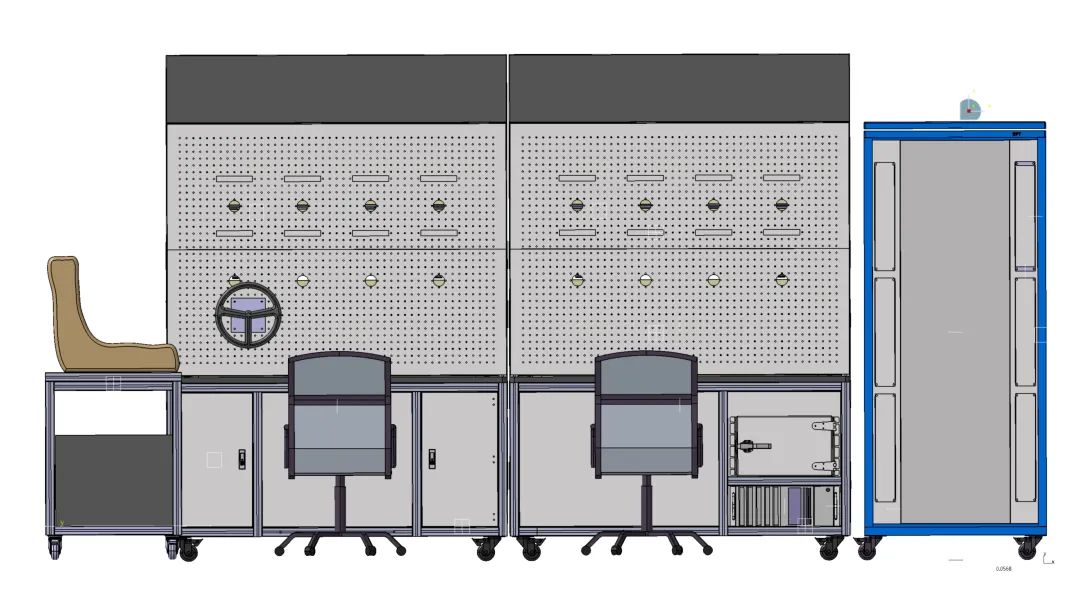
将车身域控制器固定在桌面台架,通过BOB可控板卡与VTsystem连接。
右侧机柜集成VT System,RT rack,电源,VN通讯设备。
通过线束将机柜内设备与左侧桌面DUT接插件连接,车身域台架测试环境搭建完成。
——vTESTstudio——
vTESTstudio是测试用例编辑管理工具,具有不同的用例编辑方式供选择。将编译好的脚本添加到CANoe中,即可执行自动化测试。下一章会介绍下vTESTstudio的使用。
04 vTESTstudio脚本开发示例
——脚本开发——
以转向灯控制电路为例:
首先选择test table测试单元,如下图蓝色选中部分所示,在函数定义选项内新建一个函数,模拟手动操作左转/右转,使用函数的形式方便我们调用/修改。
具体函数内容如下:
Void Set_Left_Light_ON()
{
sysvar::VTS::M5_Ch1_1.SetStimulationMode(eVTSStimulationModeResistanceGreater);
sysvar::VTS::M5_Ch1_1.SetCurveType(eVTSCurveTypeConstant);
@sysvar::VTS::M5_Ch1_1::Resistor = 1500;//此处仿真输出一个1500欧的电阻
sysvar::VTS::M5_Ch1_1.StartStimulation();
}

——在test tree新建测试用例——
首先设置好ECU工作的准备条件,例如电源ON,其他ECU发来特定的信号值,这里我们不一一列举,由各主机厂定义。
调用左转向灯函数Set_Left_Light_ON()
检查左转向灯是否开启
关闭左转向灯
检查左转向灯是否关闭
——脚本调试——
测试中有很多问题,而问题最多的时刻往往是调试阶段,这时候我们可以发现脚本或集成问题,同时也可以发现ECU样件问题。
以4.1脚本为例,当我们执行时,如果发现左转向灯没有工作该怎么办呢?
1. 保险起见,首先验证接线是否正确,使用万用表测试一下通断。有人会说接线这么简单怎么会错,毕竟测试系统中存在上千上万根线,部分接错也是在所难免。
2. 当排除接线问题后,需要确认脚本是否执行正确,脚本执行时,确认是否正确的给到ECU输入端。
3. 如果以上两个问题都不存在,检查是否满足样件工作条件。
4. 当以上所有输入满足,也可以看到左转向灯顺利开启,第一条自动化测试顺利执行完毕!
5. 执行结束后CANoe可自动生成报告供查看。
05 总结
说了这么多!总结下实现车身域高效测试的必要条件:
理解车身域控制器各个部件的功能需求
○ 熟悉各个部件的功能需求,确认所需测试台架方案,板卡功能数量,测试机柜硬件方案。
○ 根据功能需求开发测试用例,尽可能多的覆盖各种工作条件。
分配板卡
○ 根据DUT各个IO电路原理图合理分配板卡,确认真实负载和模拟负载的连接对应关系。
硬件环境集成无错误连接
○ 根据板卡分配的对应关系,正确的将ECU,外围负载,板卡正确的连接。
Vteststudio脚本开发
○ 根据已经开发好的测试用例,在vTESTstudio上开发对应的脚本,以满足自动化测试。
CANoe测试执行
○ 测试模块加载测试可执行文件,选择要执行的测试用例,测试完毕后,根据CANoe自动生成的报告,可查看详细的信息。如有软件问题,可通过相关测试数据和报告将问题反馈给相关人员。
喜欢此篇文章欢迎评论、收藏、分享支持小编~