文章目录
- 参考内容
- 动作价值函数(Action-value Function)
- 深度强化学习(DQN)
- 学习目标(Goal)
- 如何获得尽可能好的 Q ∗ ( s t , a ) → Q^{*}(s_t, a) \rightarrow Q∗(st,a)→ 用神经网络通过学习获得
- 时间差分算法(Temporal Difference, TD)算法
- TD 算法的核心思想
- TD 算法在 DQN 中的应用
- Value-Based 强化学习总结
参考内容
-
参考视频:不愧是王树森教授!6小时让我搞定了【深度强化学习完整版】我不信还有人学不明白!
-
强化学习基础
动作价值函数(Action-value Function)
-
这部分是对价值函数的回顾,在 强化学习基础 中进行了详细的讲解,看不懂这篇文章的先去简单翻一下
-
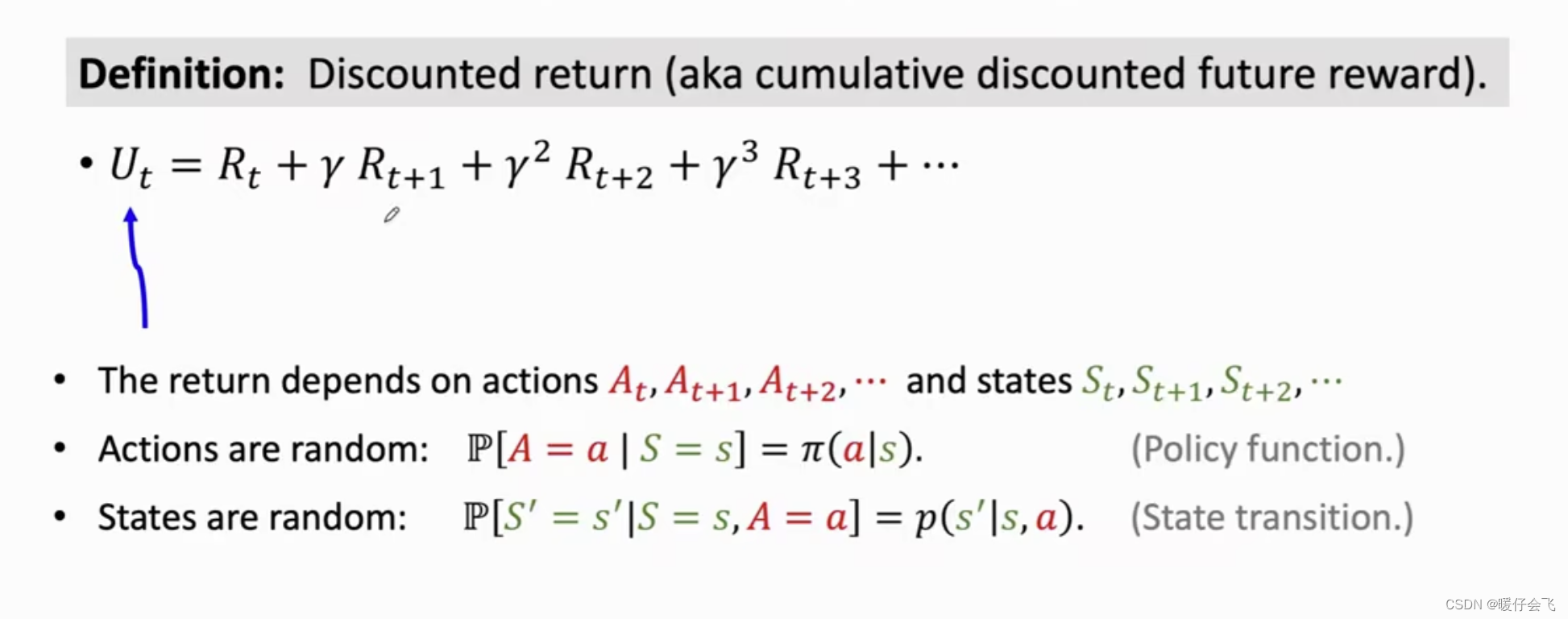
U t U_t Ut 代表的是
discounted return,是从当前时刻 t t t 到游戏结束得到的reward的折算总和,我们的目标是在游戏结束的时候,希望 U t U_t Ut 能够越大越好 -
而 U t U_t Ut 中的每个 R i R_i Ri 都取决于其所处的环境状态 S i S_i Si 和采取的行为 A i A_i Ai,因此 U t U_t Ut 直接与 R t , R t + 1 , . . . R_t, R_{t+1},... Rt,Rt+1,... 相关,也就是直接与 A t , A t + 1 , . . . A_t, A_{t+1},... At,At+1,... 以及 S t , S t + 1 , . . . S_t, S_{t+1},... St,St+1,... 相关
-
强化学习过程中有两个部分会引入随机性:
- 是
agent采取action的时候是根据策略函数(分布)π \pi π 进行随机抽样得到的 - 是 环境产生
state的时候是根据状态转移函数(分布)p ( s ′ , s , a ) p(s',s,a) p(s′,s,a) 随机抽样得到的
- 是
-
因为在每个
action和state的产生过程中都会引入随机性,就导致了每个 R i R_i Ri 都是随机变量,而这也进而导致了 U t U_t Ut 是个随机变量 -
U t U_t Ut 的值可以反映出从 t t t 直到未来游戏结束的
reward总和 -
而由于 s t , a t s_t, a_t st,at 是在 t t t 时刻可以观察到的,因此对于 t t t 时刻往后的 a i a_i ai 和 s i s_i si 我们通过
期望的计算来消除随机性: Q π ( s t , a t ) = E [ U t ∣ S t = s t , A t = a t ] Q_{\pi}(s_t, a_t)=\mathbb{E}[U_t|S_t=s_t, A_t=a_t] Qπ(st,at)=E[Ut∣St=st,At=at] -
因此 Q π ( s t , a t ) Q_{\pi}(s_t, a_t) Qπ(st,at) 只与 π , s t , a t \pi, s_t, a_t π,st,at 这三个部分有关:
-
π
\pi
π 是当前
agent采用的策略,也可以看做是个概率分布 - s t s_t st 是在 t t t 时刻的环境状态
-
a
t
a_t
at 是在
t
t
t 时刻,
agent面对环境 s t s_t st 从策略中随机抽样获得的action
-
π
\pi
π 是当前
-
当然, Q π ( s t , a t ) Q_{\pi}(s_t, a_t) Qπ(st,at) 的值越大,代表在当前环境状态 s t s_t st 下,按照当前使用的 π \pi π
策略采样得到的actiona t a_t at 越正确。但策略有很多种,未必当前这种就是最好的,因此如果在所有可选的策略中得到一个使 Q π ( s t , a t ) Q_{\pi}(s_t, a_t) Qπ(st,at) 最大的值,即 Q ∗ ( s t , a t ) = max π Q π ( s t , a t ) Q^{*}(s_t, a_t)=\max_{\pi}Q_{\pi}(s_t, a_t) Q∗(st,at)=πmaxQπ(st,at) -
Q ∗ ( s t , a t ) Q^{*}(s_t, a_t) Q∗(st,at) 终于摆脱了
策略π \pi π 的影响,能够代表在当前环境状态 s t s_t st 的情况下,无论你采用何种策略,采取 a t a_t at 在未来得到的最大的action收益的总和就是 Q ∗ ( s t , a t ) Q^{*}(s_t, a_t) Q∗(st,at) -
然而 a t a_t at 可能取值的范围是
agent的所有动作集合,例如马里奥游戏中的up, right, left这三种action构成了马里奥所有的动作。那么当在 t t t 时刻马里奥面对环境 s t s_t st 时按照 π \pi π 进行抽样得到了 a t → u p a_t \rightarrow up at→up,马里奥应该向上跳,此刻我们可以用 Q ∗ Q^{*} Q∗ 来评估出向上跳这个动作能够在未来获得的最大return。 -
我们这里完全可以不采取
随机抽样的方式得到 a t a_t at ,而是遍历所有的 a t a_t at 从而获得在当前 t t t 时刻对于所有 a t 1 , . . . a t n a_{t1},...a_{tn} at1,...atn 中能够获得最大 Q ∗ Q^{*} Q∗ 分数的 a t a_t at 作为当前 t t t 时刻的action,比如 t t t 时刻:up行为的 Q ∗ ( s t , u p ) = 5000 Q^{*}(s_t, up)=5000 Q∗(st,up)=5000right行为的 Q ∗ ( s t , r i g h t ) = 3000 Q^{*}(s_t, right)=3000 Q∗(st,right)=3000left行为的 Q ∗ ( s t , l e f t ) = 1000 Q^{*}(s_t, left)=1000 Q∗(st,left)=1000
-
那么毫无疑问,我们应该让
agent选择up作为 t t t 时刻的action
深度强化学习(DQN)
学习目标(Goal)

- 在游戏结束时获得的总收益
total reward越大越好 - 在上个部分我们已经说明了如何用
Q
∗
Q^{*}
Q∗ 描述
agent在 t t t 时刻面对环境 s t s_t st 时采取agent所有可能的action从而选取最大的 Q ∗ Q^{*} Q∗ 值,这个过程我们描述成: a ∗ = arg max a Q ∗ ( s t , a ) a^{*}=\argmax_{a}Q^{*}(s_t, a) a∗=aargmaxQ∗(st,a) -
a
∗
a^{*}
a∗ 是在
t
t
t 时刻面对
s
t
s_t
st 能够选取的最好的
action - 下面对几点进行重点的说明:
-
Q ∗ Q^{*} Q∗ 虽然能够帮我们在 t t t 时刻确定最好的行为 a ∗ a^{*} a∗,但得出这个结论并不代表着这个 a ∗ a^{*} a∗ 完全就是最好选择,而是
期望,证明 a ∗ a^{*} a∗ 这种行为从概率的角度来看是最好的选择,但未来啥样谁也不能精确描述 -
基于
动作价值函数的强化学习求解思路就是帮我们用神经网络模拟一个强大的 Q ∗ Q^{*} Q∗ 函数,从而在每个时刻 i i i 帮我们决定采取最好的 a ∗ a^{*} a∗ 作为action -
如果我们想象现实的情况,这似乎不可能,因为 Q ∗ Q^{*} Q∗ 函数好像一个先知,它是怎么知道某个
action在未来的期望的?这就好像是一个人告诉你说:“小伙子,你可以选下面三只股票,虽然我不能告诉你他们的具体交易细节,但是我可以告诉你的是,在游戏结束的时候, a 1 a_1 a1 股票会翻 10 10 10 倍, a 2 a_2 a2 翻 3 3 3 倍,而 a 3 a_3 a3 亏钱” -
但其实这在一些特定的环境(游戏环境)中是有可能的。比如你把自己看做一个 Q ∗ Q^{*} Q∗ 当你玩一个特定的游戏 100000 100000 100000 局的时候,你其实就变成了先知,因为对于过去大量的数据,你已经知道因果了,而且你玩的局数越多,对于因果的对应关系和发展规律就捕捉的越全面,所以此时如果你指导一个
agent,他觉得你未卜先知,其实只是你通过大量的数据推算了大致的情况。而且你给他提供的建议也并不完全是真正的期望,而是你根据你自己的已知情况推出的近似真实期望的结果。 -
更通俗讲:
- 你看似是
先知,其实是看了大量的数据,你可以通过大量的数据无限逼近真实的先知,但你永远是个假的先知 - 你可以根据看过的数据来推算
agent在当前状态下采取所有行为的期望(并非真实的期望,而是你基于过去数据而计算的期望) agent根据你提供的期望作为参考,选择一个当前时刻最好的行为
- 你看似是
-
深度神经网络就是在扮演这个
伪装的先知的角色。通过大量的数据训练,神经网络似乎在某个时刻 t t t 能够帮agent判断每个动作在未来的期望收益,如果神经网络足够好,那么期望的结果就足够准确,agent就能够足够好。
-
如何获得尽可能好的 Q ∗ ( s t , a ) → Q^{*}(s_t, a) \rightarrow Q∗(st,a)→ 用神经网络通过学习获得
-
用 Q ( s t , a ; w ) Q(s_t, a; w) Q(st,a;w) 表示神经网络,我们的目标是近似真实情况的 Q ∗ ( s t , a ) Q^{*}(s_t,a) Q∗(st,a)
-
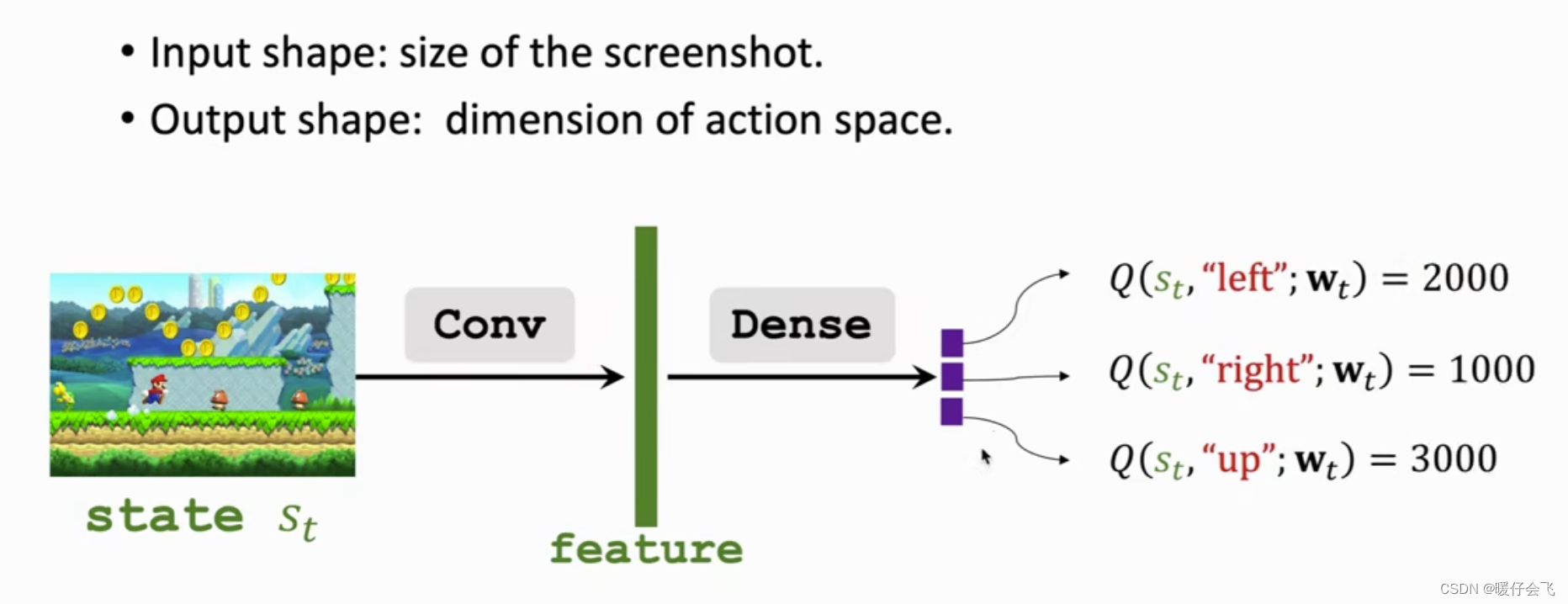
我们构造一个神经网络,将
state作为输入,输出是神经网络对于每个action的打分,在这个例子中:left得分为 2000right得分为 1000up得分为 3000
-
那么我们认为马里奥应该采取
up作为action -
重复这个过程,流程图如下:
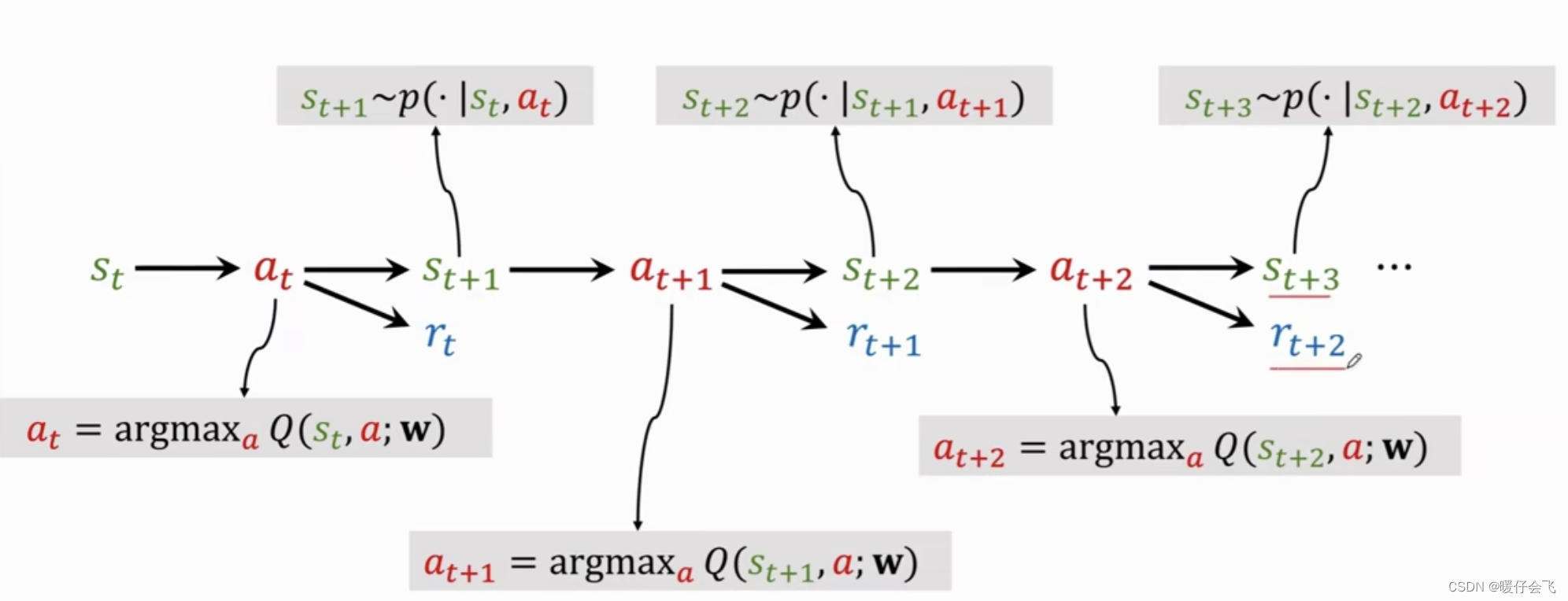
- t t t 时刻根据神经网路的结果选择出 a t a_t at 然后环境状态更新为 s t + 1 s_{t+1} st+1 的同时给出 a t a_t at 的奖励 r t r_t rt
- 神经网络根据 r t , r t + 1 , . . . r_t, r_{t+1},... rt,rt+1,... 进行训练,得到更好的对动作的评估结果一直到游戏结束
时间差分算法(Temporal Difference, TD)算法
- 我们要训练一个好的神经网络来模拟
Q
∗
(
s
t
,
a
)
Q^{*}(s_t, a)
Q∗(st,a) 要用
TD算法来完成训练 - 文章下面的思路是:
- 讲述
TD算法的核心思想 - 将
TD算法的核心思想应用到强化学习的神经网络训练中,从而获得更好的 Q ∗ ( s t , a ) Q^{*}(s_t, a) Q∗(st,a) 函数近似
- 讲述
TD 算法的核心思想
NYC, Atlanta, DC都是地名- 现在有一个时间评估器 Q ( w ) Q(w) Q(w), 它的参数是 w w w,开始它很不准确,但现在我们想训练 Q ( w ) Q(w) Q(w) 使得它能够给出某地到另一地的路程花费时间精确值。所以训练目标是得到一个更好的 Q ( w ) Q(w) Q(w)
- 为了训练 Q ( w ) Q(w) Q(w) 我们需要在现实世界中通过多次开车的实际测量值来修正 Q ( w ) Q(w) Q(w) 做出的预测结果,这样 Q ( w ) Q(w) Q(w) 的预测才会越来越准确
- 用一组实际的数值来更详细地描述这个过程:
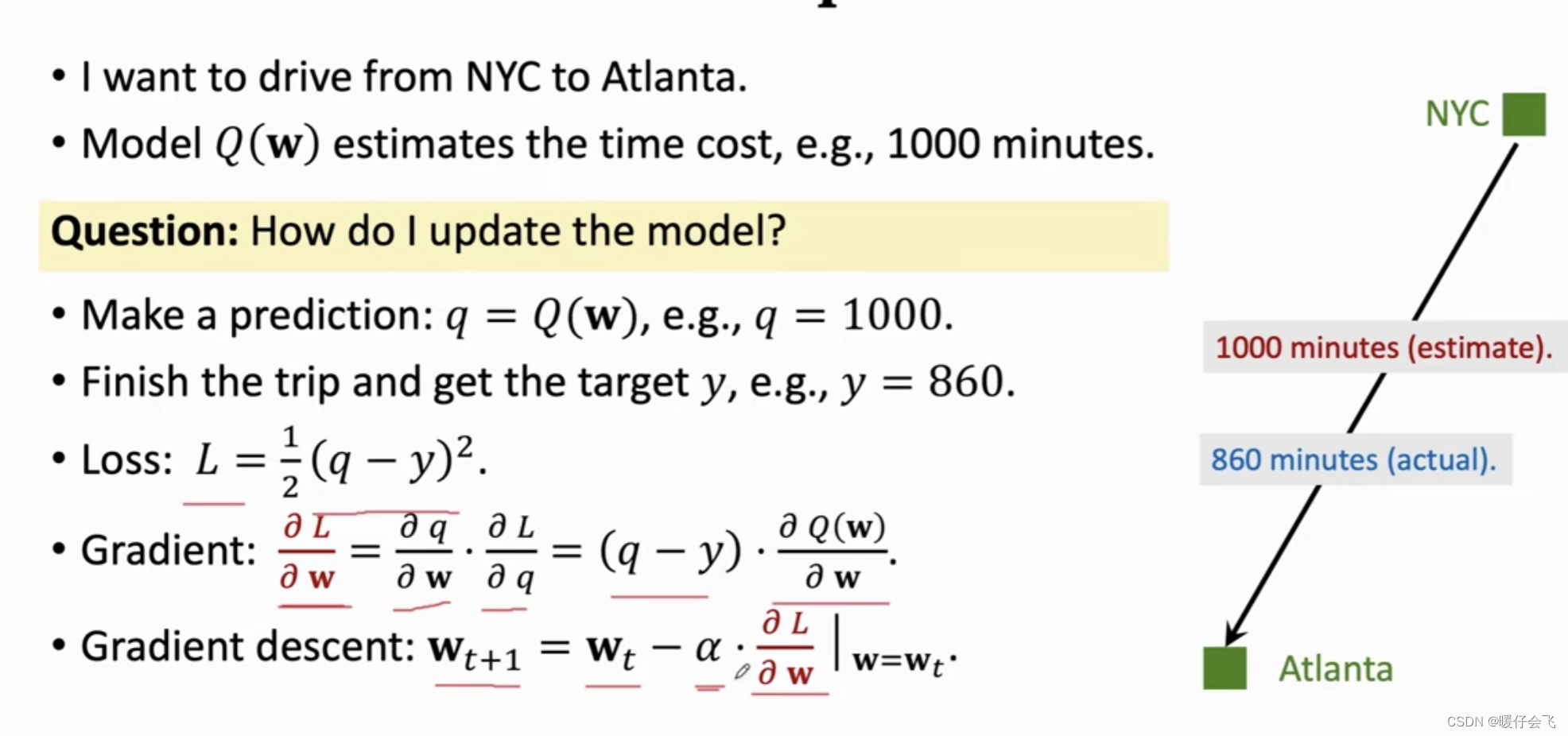
- 我要驱车从
NYC去Atlanta假设现在 Q ( w ) Q(w) Q(w) 没有进行任何的训练,那么它给出了一个近似瞎猜的评估结果 q = 1000 q=1000 q=1000,即, Q ( w ) Q(w) Q(w) 认为NYC去Atlanta要花费 1000 m i n 1000min 1000min - 但是当我真正开车从
NYC去Atlanta发现真实的距离 y = 860 k m y=860km y=860km - 所以我们定义损失函数 L = 1 2 ( q − y ) 2 L=\frac{1}{2}(q-y)^2 L=21(q−y)2 (你可以按照自己的喜好定义损失,这里就用最简单的平方差损失),根据损失函数,我们可以得到这趟旅程 Q ( w ) Q(w) Q(w) 的损失值的具体数值是 14 0 2 140^2 1402
- 然后采用神经网络优化常用的梯度下降算法来更新 Q ( w ) Q(w) Q(w) 中的权重参数 w w w,这样当我下一次用 Q ( w ) Q(w) Q(w) 的时候,它就能够给出比现在更好的结果了。
- 当我重复这个过程非常多的次数, Q ( w ) Q(w) Q(w) 就会被训练的越来越好
- 但现在同样面对一个问题:我只要想更新 Q ( w ) Q(w) Q(w) 就必须完成一整趟旅程,这代价也太大了。有没有一种方式能够利用部分的信息来更新参数,从而不浪费任何一点机会呢?
- 这就是
TD算法的核心思想了
- 我要驱车从
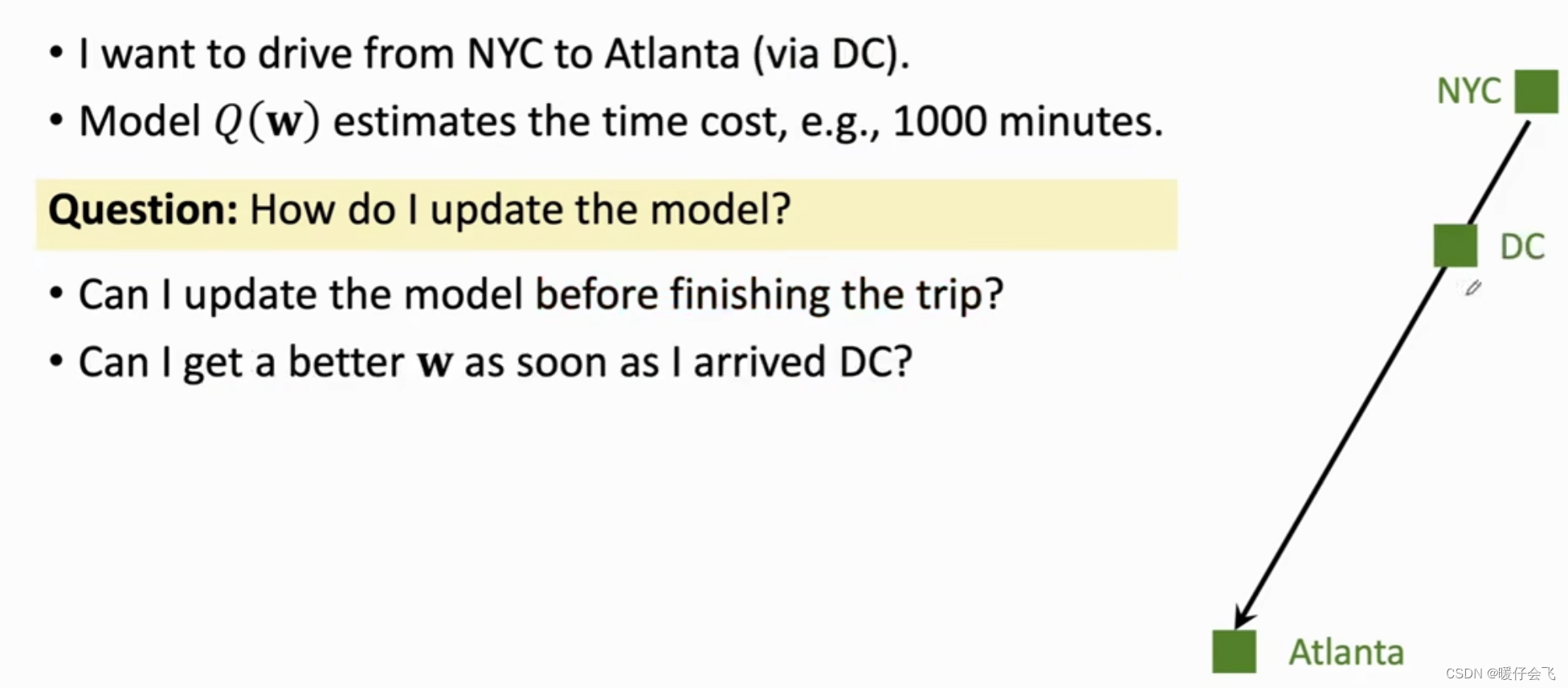
- 从
NYC开车去Atlanta时车抛锚在了DC,然后修了三天车从DC折返回NYC - 假设
Q
(
w
)
Q(w)
Q(w) 只能给出从
NYC到Atlanta的预测值 q n a q_{na} qna 以及从DC到Atalanta的预测值 q d a q_{da} qda 那么这时候TD 算法是如下更新参数的:

-
首先开车开到
DC的时候一看路程,发现走了 300 m i n 300min 300min 这是真实的观测值 -
现在模型给出从
DC到Atlanta要花费的预估时间是 600 m i n 600min 600min,所以结合真实的300 m i n 300min 300min 和第二次预测的值 600 m i n 600min 600min 我们将从NYC到Atlanta的整体预估结果更新成 900 m i n 900min 900min,这个 900 m i n 900min 900min 就是TD-target虽然这个值也是个估测值,但是比开始的 1000 m i n 1000min 1000min 更加可靠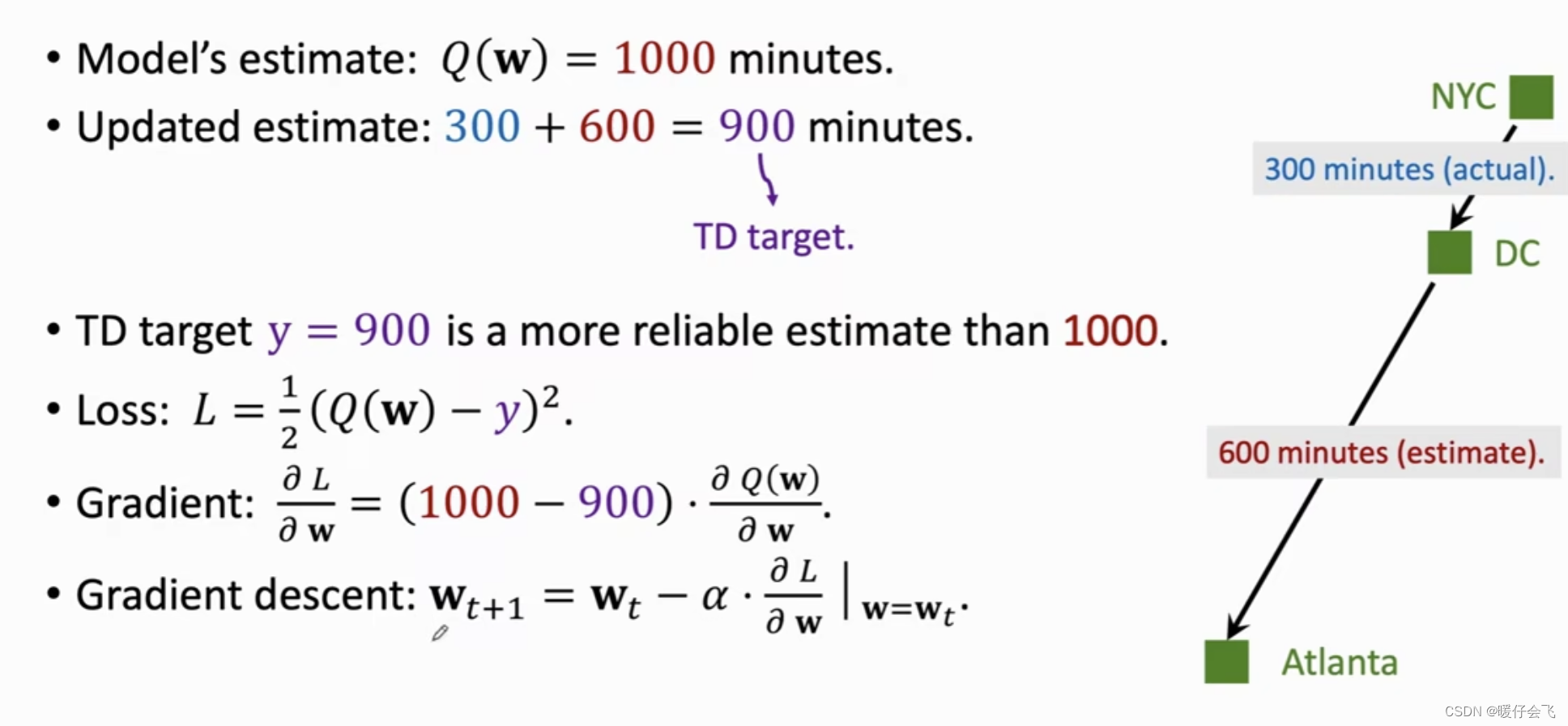
-
当你越接近
Atlanta通过TD-target的方式获得的值就估计的越准 -
现在我们的形式化以上的过程:
- q = 1000 q=1000 q=1000,但是 y t d = 900 y_{td}=900 ytd=900
- 因此这时候如果依然采用
均方误差计算 L L L,那么损失值是 L = ( q − y t d ) 2 = 10 0 2 L=(q-y_{td})^2=100^2 L=(q−ytd)2=1002,可以看到通过这种方式我们并不需要真正到达目的地,通过部分真实值+部分预估值的方式也能够不断地更新 Q ( w ) Q(w) Q(w) 的参数
-
TD 算法在 DQN 中的应用
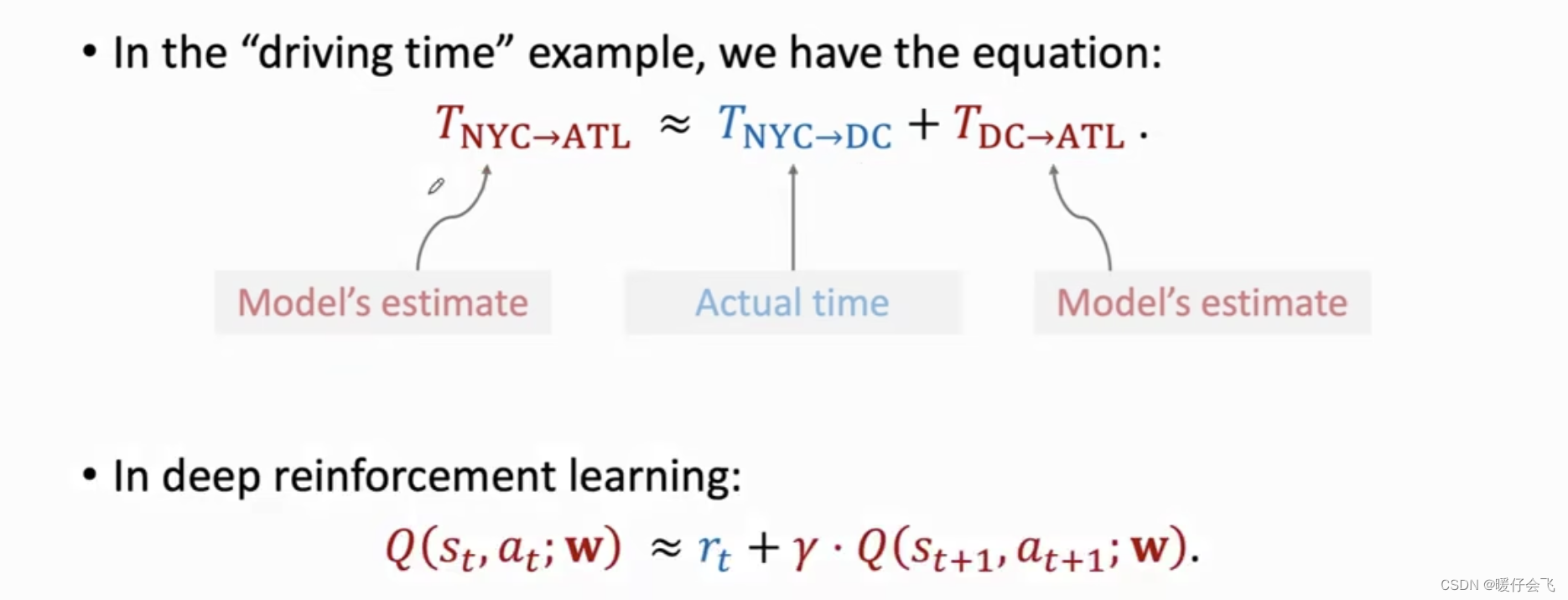
- 使用
TD算法的条件是: T N Y C → A T L ≈ T N Y C → D C + T D C → A T L T_{NYC\rightarrow ATL}\approx T_{NYC\rightarrow DC} + T_{DC\rightarrow ATL} TNYC→ATL≈TNYC→DC+TDC→ATL- 其中
T
N
Y
C
→
A
T
L
,
T
D
C
→
A
T
L
T_{NYC\rightarrow ATL}, T_{DC\rightarrow ATL}
TNYC→ATL,TDC→ATL 是通过同一个模型
Q
(
w
)
Q(w)
Q(w) 估计值,而
T
N
Y
C
→
D
C
T_{NYC\rightarrow DC}
TNYC→DC 是真实的能够确定的值
- 其中
T
N
Y
C
→
A
T
L
,
T
D
C
→
A
T
L
T_{NYC\rightarrow ATL}, T_{DC\rightarrow ATL}
TNYC→ATL,TDC→ATL 是通过同一个模型
Q
(
w
)
Q(w)
Q(w) 估计值,而
T
N
Y
C
→
D
C
T_{NYC\rightarrow DC}
TNYC→DC 是真实的能够确定的值
- 在
DQN中,我们知道在 t t t 时刻的奖励 r t r_t rt 是环境在 t + 1 t+1 t+1 时刻给出的,因此我们确切地可以知道 r t r_t rt 的值,因此我们构建公式: Q ( s t , a t ; w ) ≈ r t + γ Q ( s t + 1 , a t + 1 ; w ) Q(s_t, a_t; w) \approx r_t + \gamma Q(s_{t+1}, a_{t+1};w) Q(st,at;w)≈rt+γQ(st+1,at+1;w)-
Q
(
s
t
,
a
t
;
w
)
Q(s_t, a_t; w)
Q(st,at;w) 表示从
t
t
t 时刻往后直到游戏结束时的
return的期望值,这个值越大代表当前的 a t a_t at 越合理 -
Q
(
s
t
+
1
,
a
t
+
1
;
w
)
Q(s_{t+1}, a_{t+1}; w)
Q(st+1,at+1;w) 代表从
t
+
1
t+1
t+1 时刻往后直到游戏结束时的
return的期望值,这个值越大代表 t + 1 t+1 t+1 时刻采取的 a t + 1 a_{t+1} at+1 越好 - 那么这个公式是怎么得到的呢?
-
Q
(
s
t
,
a
t
;
w
)
Q(s_t, a_t; w)
Q(st,at;w) 表示从
t
t
t 时刻往后直到游戏结束时的
Q ( s t , a t ; w ) ≈ r t + γ Q ( s t + 1 , a t + 1 ; w ) Q(s_t, a_t; w) \approx r_t + \gamma Q(s_{t+1}, a_{t+1};w) Q(st,at;w)≈rt+γQ(st+1,at+1;w) 公式来源
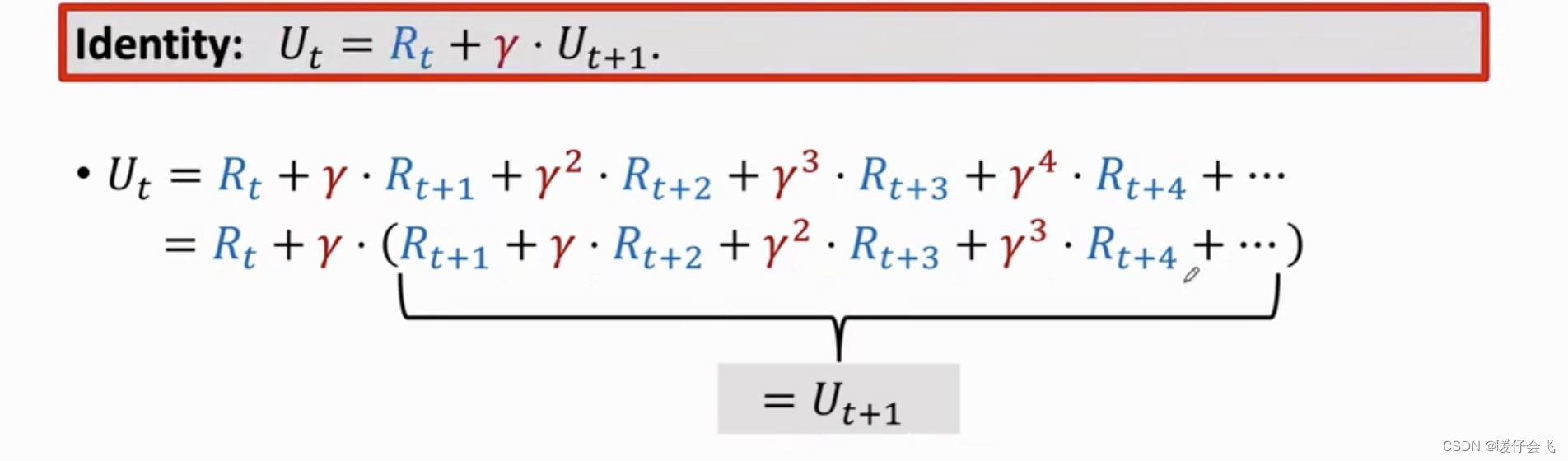
- 之前我们推导过: U t = R t + γ R t + 1 + γ 2 R t + 2 + . . . . U_t=R_t+\gamma R_{t+1}+\gamma^2 R_{t+2}+.... Ut=Rt+γRt+1+γ2Rt+2+....
- 简单地加个括号: U t = R t + γ ( R t + 1 + γ R t + 2 + . . . . ) = R t + γ ( U t + 1 ) U_t=R_t+\gamma (R_{t+1}+\gamma R_{t+2}+....) = R_t+\gamma (U_{t+1}) Ut=Rt+γ(Rt+1+γRt+2+....)=Rt+γ(Ut+1),即: U t = R t + γ U t + 1 U_t= R_t+\gamma U_{t+1} Ut=Rt+γUt+1
- 又因为我们知道
Q
π
(
s
t
,
a
t
)
=
E
[
U
t
∣
s
t
,
a
t
]
⇒
max
π
Q
π
(
s
t
,
a
t
)
=
Q
∗
(
s
t
,
a
t
)
Q_{\pi}(s_t, a_t)=\mathbb{E}[U_t|s_t, a_t] \Rightarrow \max_{\pi}Q_{\pi}(s_t, a_t)=Q^{*}(s_t, a_t)
Qπ(st,at)=E[Ut∣st,at]⇒πmaxQπ(st,at)=Q∗(st,at),而我们通过神经网络模拟的是
a
t
=
arg max
a
Q
∗
(
s
t
,
a
)
;
Q
(
s
t
,
a
t
;
w
)
=
Q
∗
(
s
t
,
a
t
)
a_t=\argmax_{a}Q^{*}(s_t, a);\\Q(s_t, a_t; w)=Q^{*}(s_t, a_t)
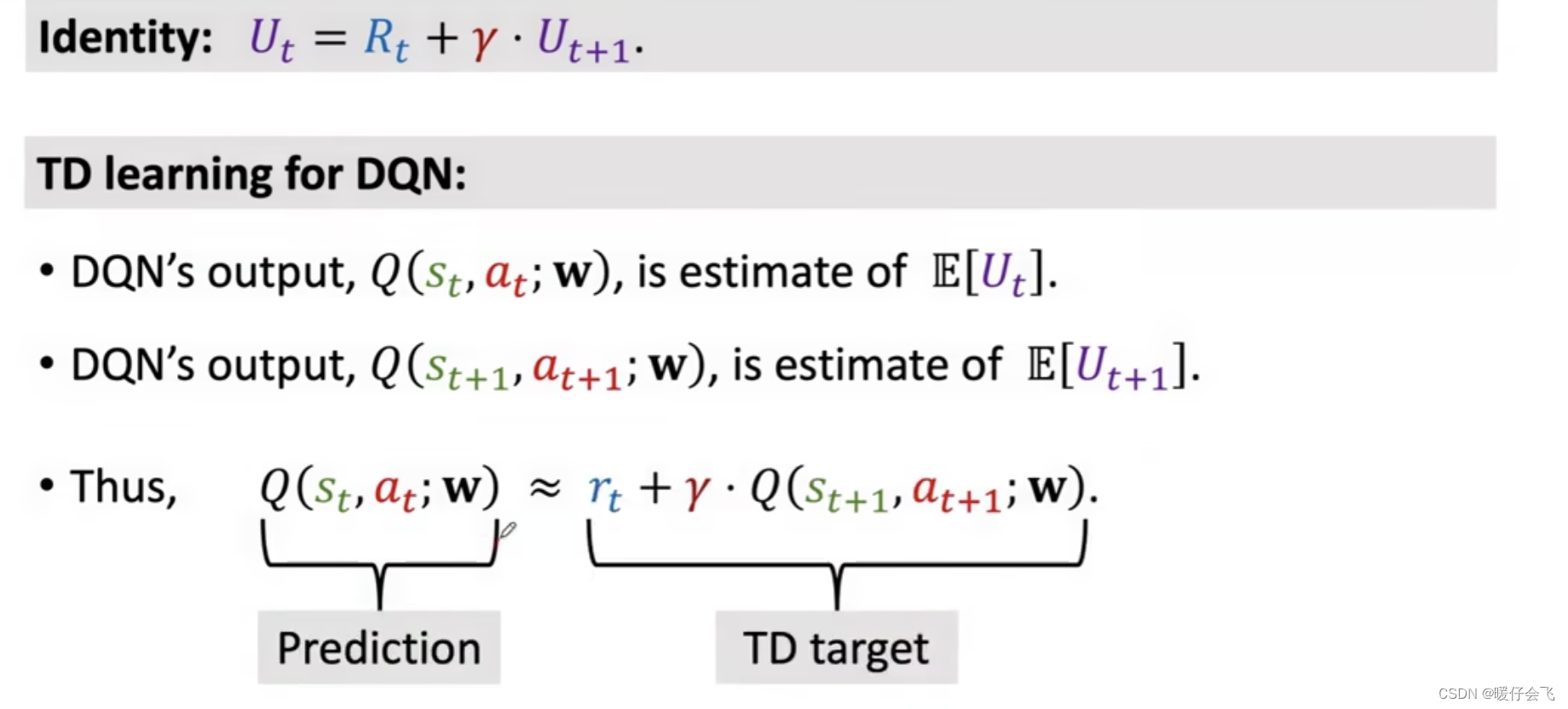
at=aargmaxQ∗(st,a);Q(st,at;w)=Q∗(st,at),神经网络的输出结果可以看成是对
U
t
U_t
Ut
期望的一个估计值(因为我们只能近似 U t U_t Ut 的期望而不可能得到真实的 U t U_t Ut 的期望) - 所以我们可以如下表示: Q ( s t , a t ; w ) ≈ E [ U t ] Q(s_t, a_t; w)\approx \mathbb{E}[U_{t}] Q(st,at;w)≈E[Ut],同样的: Q ( s t + 1 , a t + 1 ; w ) ≈ E [ U t + 1 ] Q(s_{t+1}, a_{t+1}; w)\approx \mathbb{E}[U_{t+1}] Q(st+1,at+1;w)≈E[Ut+1]
- 所以我们可以进一步得到: Q ( s t , a t ; w ) ≈ E [ r t + γ Q ( S t + 1 , A t + 1 ; w ) ] Q(s_t, a_t; w)\approx \mathbb{E}[r_t+\gamma Q(S_{t+1}, A_{t+1}; w)] Q(st,at;w)≈E[rt+γQ(St+1,At+1;w)]
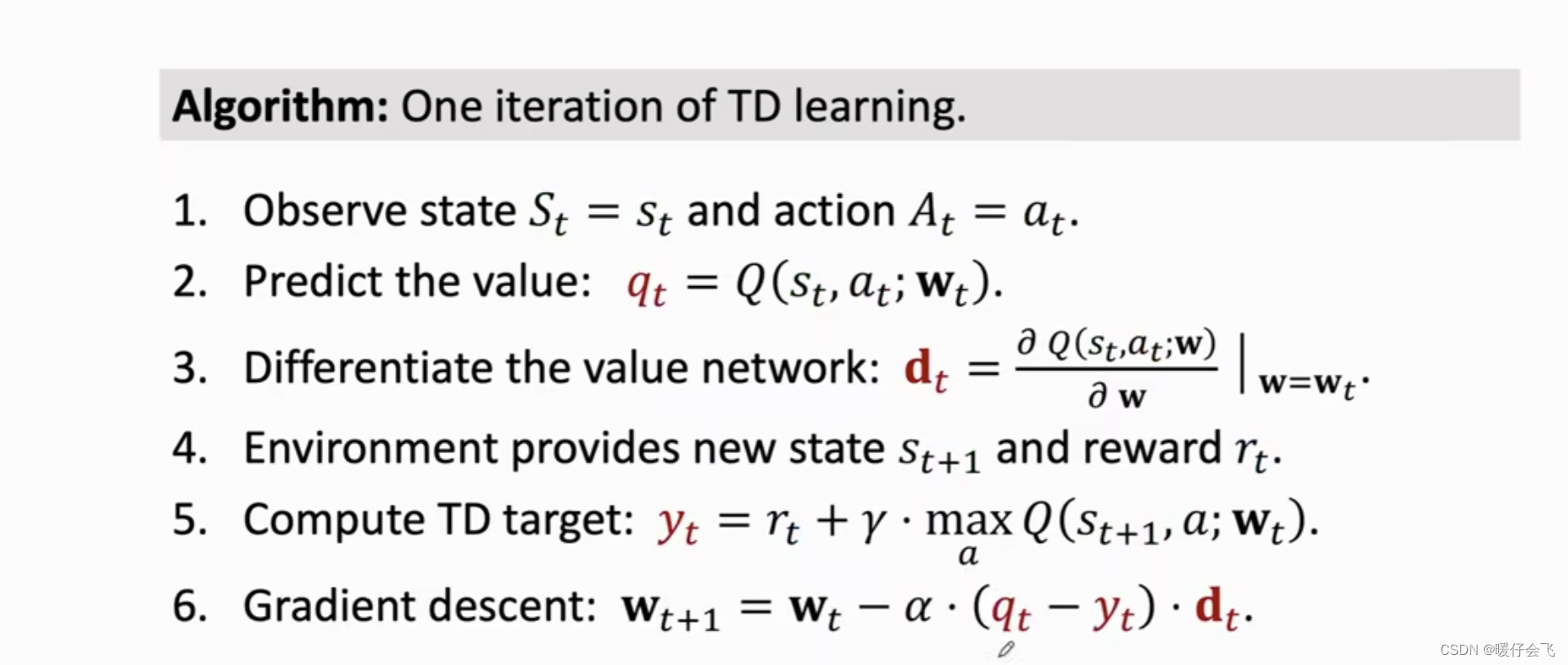
利用 TD 算法更新神经网络模型
- 根据以上结果我们知道,在
t
t
t 时刻:
- 通过神经网络得到 q = Q ( s t , a t ; w t ) q=Q(s_t, a_t; w_t) q=Q(st,at;wt)
- 同时
TD target的结果: y t d = r t + Q ( s t + 1 , a t + 1 ; w t ) , a t + 1 = arg max a Q ( s t + 1 , a ; w t ) y_{td}=r_t+Q(s_{t+1}, a_{t+1}; w_t),\\ a_{t+1}=\argmax_{a}Q(s_{t+1},a; w_t) ytd=rt+Q(st+1,at+1;wt),at+1=aargmaxQ(st+1,a;wt) - 所以利用 q q q 和 y t d y_{td} ytd 可以求算 L = 1 2 [ q − y t d ] 2 L=\frac{1}{2}[q-y_{td}]^2 L=21[q−ytd]2
- 并采用梯度下降来更新神经网络

Value-Based 强化学习总结
-
最优价值函数定义: Q ∗ ( s t , a t ) = max π E [ U t ∣ S t = s t , A t = a t ] Q^{*}(s_t, a_t)=\max_{\pi} \mathbb{E}[U_t|S_t=s_t, A_t=a_t] Q∗(st,at)=πmaxE[Ut∣St=st,At=at], 其中
- a t a_t at 最初是从 π \pi π 中随机采样出来的
- s t s_t st 是从状态转移函数 p ( s ′ , s , a ) p(s',s,a) p(s′,s,a) 中随机采样出来的
- 当确定了 a t , s t a_t, s_t at,st 之后就可以挑选出当前情况下最大的 Q Q Q 值 Q ∗ ( s t , a t ) Q^{*}(s_t, a_t) Q∗(st,at)
- 得到了 Q ∗ ( s t , a t ) Q^{*}(s_t, a_t) Q∗(st,at) 这个函数之后,我们就可以对所有的 a t a_t at 进行打分(虽然之前的 a t a_t at 是随机采样出来的,但现在不同了,我们已经得到了 Q ∗ Q^{*} Q∗函数,我们要遍历 t t t 时刻所有的行为从而获得最优的 a t a_t at)
-
基于价值的强化学习最终目标就是学习一个神经网络来近似 Q ∗ ( s , a ) Q^{*}(s, a) Q∗(s,a) 函数:
- 输入是环境的某个状态 s s s
- 输出是当前每个可选行为的分数
-
使用
TD算法训练神经网络: