一、原理介绍
MobileViT模型是为移动设备设计的轻量级、通用目的视觉变换器。它融合了卷积神经网络(CNN)和视觉变换器(ViT)的优势,旨在在保持高效性能的同时减少模型参数和降低延迟。以下是关于MobileViT模型的主要原理和特点的总结:
MobileViT模型的主要原理和特点:
- 轻量级设计:MobileViT通过精心设计的体系结构实现了轻量级,参数数量大约为6百万左右,远少于传统的ViT模型。
- 结合CNN和ViT的优势:MobileViT试图结合CNN的空间归纳偏置和ViT的全局表示能力。这种设计让MobileViT能够有效学习空间局部特征和全局信息。
- MobileViT Block:MobileViT引入了一种新的模块,称为MobileViT Block,它通过标准卷积和1x1卷积编码局部空间信息,然后通过变换器学习全局信息。这一设计允许MobileViT具备CNN和ViT的属性,帮助模型以较少的参数学习更好的表示。
- 多尺度训练:为了提高训练效率,MobileViT采用了多尺度采样器,这种方法在训练过程中使用不同尺度的输入图像,有助于模型学习多尺度的表示。
- 广泛的应用:MobileViT在多个任务上展现出了卓越的性能,包括图像分类、目标检测和语义分割。这证明了MobileViT作为一个通用视觉模型的有效性。
总结:MobileViT是一个旨在移动设备上实现高效视觉任务处理的模型。它通过巧妙地结合CNN和ViT的优势,在保持模型轻量级的同时,实现了出色的性能。MobileViT的设计思想为在资源受限的环境中部署高效的视觉模型提供了一个有价值的参考。通过其创新的MobileViT Block和多尺度训练方法,MobileViT在多个视觉任务上取得了优异的结果,展现了其作为一个通用、轻量级和高效的视觉变换器的潜力。
mobilevitv1.py代码:
"""
original code from apple:
https://github.com/apple/ml-cvnets/blob/main/cvnets/models/classification/mobilevit.py
"""
import math
import numpy as np
import torch
import torch.nn as nn
from torch import Tensor
from torch.nn import functional as F
from typing import Tuple, Dict, Sequence
from typing import Union, Optional
__all__ = ['mobile_vit_small', 'mobile_vit_x_small', 'mobile_vit_xx_small']
def make_divisible(
v: Union[float, int],
divisor: Optional[int] = 8,
min_value: Optional[Union[float, int]] = None,
) -> Union[float, int]:
"""
This function is taken from the original tf repo.
It ensures that all layers have a channel number that is divisible by 8
It can be seen here:
https://github.com/tensorflow/models/blob/master/research/slim/nets/mobilenet/mobilenet.py
:param v:
:param divisor:
:param min_value:
:return:
"""
if min_value is None:
min_value = divisor
new_v = max(min_value, int(v + divisor / 2) // divisor * divisor)
# Make sure that round down does not go down by more than 10%.
if new_v < 0.9 * v:
new_v += divisor
return new_v
def bound_fn(
min_val: Union[float, int], max_val: Union[float, int], value: Union[float, int]
) -> Union[float, int]:
return max(min_val, min(max_val, value))
def get_config(mode: str = "xxs") -> dict:
width_multiplier = 0.5
ffn_multiplier = 2
layer_0_dim = bound_fn(min_val=16, max_val=64, value=32 * width_multiplier)
layer_0_dim = int(make_divisible(layer_0_dim, divisor=8, min_value=16))
# print("layer_0_dim: ", layer_0_dim)
if mode == "xx_small":
mv2_exp_mult = 2
config = {
"layer1": {
"out_channels": 16,
"expand_ratio": mv2_exp_mult,
"num_blocks": 1,
"stride": 1,
"block_type": "mv2",
},
"layer2": {
"out_channels": 24,
"expand_ratio": mv2_exp_mult,
"num_blocks": 3,
"stride": 2,
"block_type": "mv2",
},
"layer3": { # 28x28
"out_channels": 48,
"transformer_channels": 64,
"ffn_dim": 128,
"transformer_blocks": 2,
"patch_h": 2, # 8,
"patch_w": 2, # 8,
"stride": 2,
"mv_expand_ratio": mv2_exp_mult,
"num_heads": 4,
"block_type": "mobilevit",
},
"layer4": { # 14x14
"out_channels": 64,
"transformer_channels": 80,
"ffn_dim": 160,
"transformer_blocks": 4,
"patch_h": 2, # 4,
"patch_w": 2, # 4,
"stride": 2,
"mv_expand_ratio": mv2_exp_mult,
"num_heads": 4,
"block_type": "mobilevit",
},
"layer5": { # 7x7
"out_channels": 80,
"transformer_channels": 96,
"ffn_dim": 192,
"transformer_blocks": 3,
"patch_h": 2,
"patch_w": 2,
"stride": 2,
"mv_expand_ratio": mv2_exp_mult,
"num_heads": 4,
"block_type": "mobilevit",
},
"last_layer_exp_factor": 4,
"cls_dropout": 0.1
}
elif mode == "x_small":
mv2_exp_mult = 4
config = {
"layer1": {
"out_channels": 32,
"expand_ratio": mv2_exp_mult,
"num_blocks": 1,
"stride": 1,
"block_type": "mv2",
},
"layer2": {
"out_channels": 48,
"expand_ratio": mv2_exp_mult,
"num_blocks": 3,
"stride": 2,
"block_type": "mv2",
},
"layer3": { # 28x28
"out_channels": 64,
"transformer_channels": 96,
"ffn_dim": 192,
"transformer_blocks": 2,
"patch_h": 2,
"patch_w": 2,
"stride": 2,
"mv_expand_ratio": mv2_exp_mult,
"num_heads": 4,
"block_type": "mobilevit",
},
"layer4": { # 14x14
"out_channels": 80,
"transformer_channels": 120,
"ffn_dim": 240,
"transformer_blocks": 4,
"patch_h": 2,
"patch_w": 2,
"stride": 2,
"mv_expand_ratio": mv2_exp_mult,
"num_heads": 4,
"block_type": "mobilevit",
},
"layer5": { # 7x7
"out_channels": 96,
"transformer_channels": 144,
"ffn_dim": 288,
"transformer_blocks": 3,
"patch_h": 2,
"patch_w": 2,
"stride": 2,
"mv_expand_ratio": mv2_exp_mult,
"num_heads": 4,
"block_type": "mobilevit",
},
"last_layer_exp_factor": 4,
"cls_dropout": 0.1
}
elif mode == "small":
mv2_exp_mult = 4
config = {
"layer1": {
"out_channels": 32,
"expand_ratio": mv2_exp_mult,
"num_blocks": 1,
"stride": 1,
"block_type": "mv2",
},
"layer2": {
"out_channels": 64,
"expand_ratio": mv2_exp_mult,
"num_blocks": 3,
"stride": 2,
"block_type": "mv2",
},
"layer3": { # 28x28
"out_channels": 96,
"transformer_channels": 144,
"ffn_dim": 288,
"transformer_blocks": 2,
"patch_h": 2,
"patch_w": 2,
"stride": 2,
"mv_expand_ratio": mv2_exp_mult,
"num_heads": 4,
"block_type": "mobilevit",
},
"layer4": { # 14x14
"out_channels": 128,
"transformer_channels": 192,
"ffn_dim": 384,
"transformer_blocks": 4,
"patch_h": 2,
"patch_w": 2,
"stride": 2,
"mv_expand_ratio": mv2_exp_mult,
"num_heads": 4,
"block_type": "mobilevit",
},
"layer5": { # 7x7
"out_channels": 160,
"transformer_channels": 240,
"ffn_dim": 480,
"transformer_blocks": 3,
"patch_h": 2,
"patch_w": 2,
"stride": 2,
"mv_expand_ratio": mv2_exp_mult,
"num_heads": 4,
"block_type": "mobilevit",
},
"last_layer_exp_factor": 4,
"cls_dropout": 0.1
}
elif mode == "2xx_small":
mv2_exp_mult = 2
config = {
"layer0": {
"img_channels": 3,
"out_channels": layer_0_dim,
},
"layer1": {
"out_channels": int(make_divisible(64 * width_multiplier, divisor=16)),
"expand_ratio": mv2_exp_mult,
"num_blocks": 1,
"stride": 1,
"block_type": "mv2",
},
"layer2": {
"out_channels": int(make_divisible(128 * width_multiplier, divisor=8)),
"expand_ratio": mv2_exp_mult,
"num_blocks": 2,
"stride": 2,
"block_type": "mv2",
},
"layer3": { # 28x28
"out_channels": int(make_divisible(256 * width_multiplier, divisor=8)),
"attn_unit_dim": int(make_divisible(128 * width_multiplier, divisor=8)),
"ffn_multiplier": ffn_multiplier,
"attn_blocks": 2,
"patch_h": 2,
"patch_w": 2,
"stride": 2,
"mv_expand_ratio": mv2_exp_mult,
"block_type": "mobilevit",
},
"layer4": { # 14x14
"out_channels": int(make_divisible(384 * width_multiplier, divisor=8)),
"attn_unit_dim": int(make_divisible(192 * width_multiplier, divisor=8)),
"ffn_multiplier": ffn_multiplier,
"attn_blocks": 4,
"patch_h": 2,
"patch_w": 2,
"stride": 2,
"mv_expand_ratio": mv2_exp_mult,
"block_type": "mobilevit",
},
"layer5": { # 7x7
"out_channels": int(make_divisible(512 * width_multiplier, divisor=8)),
"attn_unit_dim": int(make_divisible(256 * width_multiplier, divisor=8)),
"ffn_multiplier": ffn_multiplier,
"attn_blocks": 3,
"patch_h": 2,
"patch_w": 2,
"stride": 2,
"mv_expand_ratio": mv2_exp_mult,
"block_type": "mobilevit",
},
"last_layer_exp_factor": 4,
}
else:
raise NotImplementedError
for k in ["layer1", "layer2", "layer3", "layer4", "layer5"]:
config[k].update({"dropout": 0.1, "ffn_dropout": 0.0, "attn_dropout": 0.0})
return config
class ConvLayer(nn.Module):
"""
Applies a 2D convolution over an input
Args:
in_channels (int): :math:`C_{in}` from an expected input of size :math:`(N, C_{in}, H_{in}, W_{in})`
out_channels (int): :math:`C_{out}` from an expected output of size :math:`(N, C_{out}, H_{out}, W_{out})`
kernel_size (Union[int, Tuple[int, int]]): Kernel size for convolution.
stride (Union[int, Tuple[int, int]]): Stride for convolution. Default: 1
groups (Optional[int]): Number of groups in convolution. Default: 1
bias (Optional[bool]): Use bias. Default: ``False``
use_norm (Optional[bool]): Use normalization layer after convolution. Default: ``True``
use_act (Optional[bool]): Use activation layer after convolution (or convolution and normalization).
Default: ``True``
Shape:
- Input: :math:`(N, C_{in}, H_{in}, W_{in})`
- Output: :math:`(N, C_{out}, H_{out}, W_{out})`
.. note::
For depth-wise convolution, `groups=C_{in}=C_{out}`.
"""
def __init__(
self,
in_channels: int, # 输入通道数
out_channels: int, # 输出通道数
kernel_size: Union[int, Tuple[int, int]], # 卷积核大小
stride: Optional[Union[int, Tuple[int, int]]] = 1, # 步长
groups: Optional[int] = 1, # 分组卷积
bias: Optional[bool] = False, # 是否使用偏置
use_norm: Optional[bool] = True, # 是否使用归一化
use_act: Optional[bool] = True, # 是否使用激活函数
) -> None:
super().__init__()
if isinstance(kernel_size, int):
kernel_size = (kernel_size, kernel_size)
if isinstance(stride, int):
stride = (stride, stride)
assert isinstance(kernel_size, Tuple)
assert isinstance(stride, Tuple)
padding = (
int((kernel_size[0] - 1) / 2),
int((kernel_size[1] - 1) / 2),
)
block = nn.Sequential()
conv_layer = nn.Conv2d(
in_channels=in_channels,
out_channels=out_channels,
kernel_size=kernel_size,
stride=stride,
groups=groups,
padding=padding,
bias=bias
)
block.add_module(name="conv", module=conv_layer)
if use_norm:
norm_layer = nn.BatchNorm2d(num_features=out_channels, momentum=0.1) # BatchNorm2d
block.add_module(name="norm", module=norm_layer)
if use_act:
act_layer = nn.SiLU() # Swish activation
block.add_module(name="act", module=act_layer)
self.block = block
def forward(self, x: Tensor) -> Tensor:
return self.block(x)
class MultiHeadAttention(nn.Module):
"""
This layer applies a multi-head self- or cross-attention as described in
`Attention is all you need <https://arxiv.org/abs/1706.03762>`_ paper
Args:
embed_dim (int): :math:`C_{in}` from an expected input of size :math:`(N, P, C_{in})`
num_heads (int): Number of heads in multi-head attention
attn_dropout (float): Attention dropout. Default: 0.0
bias (bool): Use bias or not. Default: ``True``
Shape:
- Input: :math:`(N, P, C_{in})` where :math:`N` is batch size, :math:`P` is number of patches,
and :math:`C_{in}` is input embedding dim
- Output: same shape as the input
"""
def __init__(
self,
embed_dim: int,
num_heads: int,
attn_dropout: float = 0.0,
bias: bool = True,
*args,
**kwargs
) -> None:
super().__init__()
if embed_dim % num_heads != 0:
raise ValueError(
"Embedding dim must be divisible by number of heads in {}. Got: embed_dim={} and num_heads={}".format(
self.__class__.__name__, embed_dim, num_heads
)
)
self.qkv_proj = nn.Linear(in_features=embed_dim, out_features=3 * embed_dim, bias=bias)
self.attn_dropout = nn.Dropout(p=attn_dropout)
self.out_proj = nn.Linear(in_features=embed_dim, out_features=embed_dim, bias=bias)
self.head_dim = embed_dim // num_heads
self.scaling = self.head_dim ** -0.5
self.softmax = nn.Softmax(dim=-1)
self.num_heads = num_heads
self.embed_dim = embed_dim
def forward(self, x_q: Tensor) -> Tensor:
# [N, P, C]
b_sz, n_patches, in_channels = x_q.shape
# self-attention
# [N, P, C] -> [N, P, 3C] -> [N, P, 3, h, c] where C = hc
qkv = self.qkv_proj(x_q).reshape(b_sz, n_patches, 3, self.num_heads, -1)
# [N, P, 3, h, c] -> [N, h, 3, P, C]
qkv = qkv.transpose(1, 3).contiguous()
# [N, h, 3, P, C] -> [N, h, P, C] x 3
query, key, value = qkv[:, :, 0], qkv[:, :, 1], qkv[:, :, 2]
query = query * self.scaling
# [N h, P, c] -> [N, h, c, P]
key = key.transpose(-1, -2)
# QK^T
# [N, h, P, c] x [N, h, c, P] -> [N, h, P, P]
attn = torch.matmul(query, key)
attn = self.softmax(attn)
attn = self.attn_dropout(attn)
# weighted sum
# [N, h, P, P] x [N, h, P, c] -> [N, h, P, c]
out = torch.matmul(attn, value)
# [N, h, P, c] -> [N, P, h, c] -> [N, P, C]
out = out.transpose(1, 2).reshape(b_sz, n_patches, -1)
out = self.out_proj(out)
return out
class TransformerEncoder(nn.Module):
"""
This class defines the pre-norm `Transformer encoder <https://arxiv.org/abs/1706.03762>`_
Args:
embed_dim (int): :math:`C_{in}` from an expected input of size :math:`(N, P, C_{in})`
ffn_latent_dim (int): Inner dimension of the FFN
num_heads (int) : Number of heads in multi-head attention. Default: 8
attn_dropout (float): Dropout rate for attention in multi-head attention. Default: 0.0
dropout (float): Dropout rate. Default: 0.0
ffn_dropout (float): Dropout between FFN layers. Default: 0.0
Shape:
- Input: :math:`(N, P, C_{in})` where :math:`N` is batch size, :math:`P` is number of patches,
and :math:`C_{in}` is input embedding dim
- Output: same shape as the input
"""
def __init__(
self,
embed_dim: int,
ffn_latent_dim: int,
num_heads: Optional[int] = 8,
attn_dropout: Optional[float] = 0.0,
dropout: Optional[float] = 0.0,
ffn_dropout: Optional[float] = 0.0,
*args,
**kwargs
) -> None:
super().__init__()
attn_unit = MultiHeadAttention(
embed_dim,
num_heads,
attn_dropout=attn_dropout,
bias=True
)
self.pre_norm_mha = nn.Sequential(
nn.LayerNorm(embed_dim),
attn_unit,
nn.Dropout(p=dropout)
)
self.pre_norm_ffn = nn.Sequential(
nn.LayerNorm(embed_dim),
nn.Linear(in_features=embed_dim, out_features=ffn_latent_dim, bias=True),
nn.SiLU(),
nn.Dropout(p=ffn_dropout),
nn.Linear(in_features=ffn_latent_dim, out_features=embed_dim, bias=True),
nn.Dropout(p=dropout)
)
self.embed_dim = embed_dim
self.ffn_dim = ffn_latent_dim
self.ffn_dropout = ffn_dropout
self.std_dropout = dropout
def forward(self, x: Tensor) -> Tensor:
# multi-head attention
res = x
x = self.pre_norm_mha(x)
x = x + res
# feed forward network
x = x + self.pre_norm_ffn(x)
return x
class LinearSelfAttention(nn.Module):
"""
This layer applies a self-attention with linear complexity, as described in `MobileViTv2 <https://arxiv.org/abs/2206.02680>`_ paper.
This layer can be used for self- as well as cross-attention.
Args:
opts: command line arguments
embed_dim (int): :math:`C` from an expected input of size :math:`(N, C, H, W)`
attn_dropout (Optional[float]): Dropout value for context scores. Default: 0.0
bias (Optional[bool]): Use bias in learnable layers. Default: True
Shape:
- Input: :math:`(N, C, P, N)` where :math:`N` is the batch size, :math:`C` is the input channels,
:math:`P` is the number of pixels in the patch, and :math:`N` is the number of patches
- Output: same as the input
.. note::
For MobileViTv2, we unfold the feature map [B, C, H, W] into [B, C, P, N] where P is the number of pixels
in a patch and N is the number of patches. Because channel is the first dimension in this unfolded tensor,
we use point-wise convolution (instead of a linear layer). This avoids a transpose operation (which may be
expensive on resource-constrained devices) that may be required to convert the unfolded tensor from
channel-first to channel-last format in case of a linear layer.
"""
def __init__(self,
embed_dim: int,
attn_dropout: Optional[float] = 0.0,
bias: Optional[bool] = True,
*args,
**kwargs) -> None:
super().__init__()
self.attn_dropout = nn.Dropout(p=attn_dropout)
self.qkv_proj = ConvLayer(
in_channels=embed_dim,
out_channels=embed_dim * 2 + 1,
kernel_size=1,
bias=bias,
use_norm=False,
use_act=False
)
self.out_proj = ConvLayer(
in_channels=embed_dim,
out_channels=embed_dim,
bias=bias,
kernel_size=1,
use_norm=False,
use_act=False,
)
self.embed_dim = embed_dim
def forward(self, x: Tensor, x_prev: Optional[Tensor] = None, *args, **kwargs) -> Tensor:
if x_prev is None:
return self._forward_self_attn(x, *args, **kwargs)
else:
return self._forward_cross_attn(x, x_prev, *args, **kwargs)
def _forward_self_attn(self, x: Tensor, *args, **kwargs) -> Tensor:
# [B, C, P, N] --> [B, h + 2d, P, N]
qkv = self.qkv_proj(x)
# [B, h + 2d, P, N] --> [B, h, P, N], [B, d, P, N], [B, 1, P, N]
# Query --> [B, 1, P ,N]
# Value, key --> [B, d, P, N]
query, key, value = torch.split(
qkv, [1, self.embed_dim, self.embed_dim], dim=1
)
# 在M通道上做softmax
context_scores = F.softmax(query, dim=-1)
context_scores = self.attn_dropout(context_scores)
# Compute context vector
# [B, d, P, N] x [B, 1, P, N] -> [B, d, P, N]
context_vector = key * context_scores
# [B, d, P, N] --> [B, d, P, 1]
context_vector = context_vector.sum(dim=-1, keepdim=True)
# combine context vector with values
# [B, d, P, N] * [B, d, P, 1] --> [B, d, P, N]
out = F.relu(value) * context_vector.expand_as(value)
out = self.out_proj(out)
return out
def _forward_cross_attn(
self, x: Tensor, x_prev: Optional[Tensor] = None, *args, **kwargs):
# x --> [B, C, P, N]
# x_prev --> [B, C, P, N]
batch_size, in_dim, kv_patch_area, kv_num_patches = x.shape
q_patch_area, q_num_patches = x.shape[-2:]
assert (
kv_patch_area == q_patch_area
), "The number of patches in the query and key-value tensors must be the same"
# compute query, key, and value
# [B, C, P, M] --> [B, 1 + d, P, M]
qk = F.conv2d(
x_prev,
weight=self.qkv_proj.block.conv.weight[: self.embed_dim + 1, ...],
bias=self.qkv_proj.block.conv.bias[: self.embed_dim + 1, ...],
)
# [B, 1 + d, P, M] --> [B, 1, P, M], [B, d, P, M]
query, key = torch.split(qk, split_size_or_sections=[1, self.embed_dim], dim=1)
# [B, C, P, N] --> [B, d, P, N]
value = F.conv2d(
x,
weight=self.qkv_proj.block.conv.weight[self.embed_dim + 1:, ...],
bias=self.qkv_proj.block.conv.bias[self.embed_dim + 1:, ...],
)
context_scores = F.softmax(query, dim=-1)
context_scores = self.attn_dropout(context_scores)
context_vector = key * context_scores
context_vector = torch.sum(context_vector, dim=-1, keepdim=True)
out = F.relu(value) * context_vector.expand_as(value)
out = self.out_proj(out)
return out
class LinearAttnFFN(nn.Module):
"""
This class defines the pre-norm transformer encoder with linear self-attention in `MobileViTv2 <https://arxiv.org/abs/2206.02680>`_ paper
Args:
embed_dim (int): :math:`C_{in}` from an expected input of size :math:`(B, C_{in}, P, N)`
ffn_latent_dim (int): Inner dimension of the FFN
attn_dropout (Optional[float]): Dropout rate for attention in multi-head attention. Default: 0.0
dropout (Optional[float]): Dropout rate. Default: 0.0
ffn_dropout (Optional[float]): Dropout between FFN layers. Default: 0.0
norm_layer (Optional[str]): Normalization layer. Default: layer_norm_2d
Shape:
- Input: :math:`(B, C_{in}, P, N)` where :math:`B` is batch size, :math:`C_{in}` is input embedding dim,
:math:`P` is number of pixels in a patch, and :math:`N` is number of patches,
- Output: same shape as the input
"""
def __init__(
self,
embed_dim: int,
ffn_latent_dim: int,
attn_dropout: Optional[float] = 0.0,
dropout: Optional[float] = 0.1,
ffn_dropout: Optional[float] = 0.0,
*args,
**kwargs
) -> None:
super().__init__()
attn_unit = LinearSelfAttention(
embed_dim=embed_dim, attn_dropout=attn_dropout, bias=True
)
self.pre_norm_attn = nn.Sequential(
nn.GroupNorm(num_channels=embed_dim, num_groups=1),
attn_unit,
nn.Dropout(p=dropout)
)
self.pre_norm_ffn = nn.Sequential(
nn.GroupNorm(num_channels=embed_dim, num_groups=1),
ConvLayer(
in_channels=embed_dim,
out_channels=ffn_latent_dim,
kernel_size=1,
stride=1,
bias=True,
use_norm=False,
use_act=True,
),
nn.Dropout(p=ffn_dropout),
ConvLayer(
in_channels=ffn_latent_dim,
out_channels=embed_dim,
kernel_size=1,
stride=1,
bias=True,
use_norm=False,
use_act=False,
),
nn.Dropout(p=dropout)
)
self.embed_dim = embed_dim
self.ffn_dim = ffn_latent_dim
self.ffn_dropout = ffn_dropout
self.std_dropout = dropout
def forward(self,
x: Tensor, x_prev: Optional[Tensor] = None, *args, **kwargs
) -> Tensor:
if x_prev is None:
# self-attention
x = x + self.pre_norm_attn(x)
else:
# cross-attention
res = x
x = self.pre_norm_attn[0](x) # norm
x = self.pre_norm_attn[1](x, x_prev) # attn
x = self.pre_norm_attn[2](x) # drop
x = x + res # residual
x = x + self.pre_norm_ffn(x)
return x
def make_divisible(
v: Union[float, int],
divisor: Optional[int] = 8,
min_value: Optional[Union[float, int]] = None,
) -> Union[float, int]:
"""
This function is taken from the original tf repo.
It ensures that all layers have a channel number that is divisible by 8
It can be seen here:
https://github.com/tensorflow/models/blob/master/research/slim/nets/mobilenet/mobilenet.py
:param v:
:param divisor:
:param min_value:
:return:
"""
if min_value is None:
min_value = divisor
new_v = max(min_value, int(v + divisor / 2) // divisor * divisor)
# Make sure that round down does not go down by more than 10%.
if new_v < 0.9 * v:
new_v += divisor
return new_v
class Identity(nn.Module):
"""
This is a place-holder and returns the same tensor.
"""
def __init__(self):
super(Identity, self).__init__()
def forward(self, x: Tensor) -> Tensor:
return x
def profile_module(self, x: Tensor) -> Tuple[Tensor, float, float]:
return x, 0.0, 0.0
class InvertedResidual(nn.Module):
"""
This class implements the inverted residual block, as described in `MobileNetv2 <https://arxiv.org/abs/1801.04381>`_ paper
Args:
in_channels (int): :math:`C_{in}` from an expected input of size :math:`(N, C_{in}, H_{in}, W_{in})`
out_channels (int): :math:`C_{out}` from an expected output of size :math:`(N, C_{out}, H_{out}, W_{out)`
stride (int): Use convolutions with a stride. Default: 1
expand_ratio (Union[int, float]): Expand the input channels by this factor in depth-wise conv
skip_connection (Optional[bool]): Use skip-connection. Default: True
Shape:
- Input: :math:`(N, C_{in}, H_{in}, W_{in})`
- Output: :math:`(N, C_{out}, H_{out}, W_{out})`
.. note::
If `in_channels =! out_channels` and `stride > 1`, we set `skip_connection=False`
"""
def __init__(
self,
in_channels: int,
out_channels: int,
stride: int,
expand_ratio: Union[int, float], # 扩张因子,到底要在隐层将通道数扩张多少倍
skip_connection: Optional[bool] = True, # 是否使用跳跃连接
) -> None:
assert stride in [1, 2]
hidden_dim = make_divisible(int(round(in_channels * expand_ratio)), 8)
super().__init__()
block = nn.Sequential()
if expand_ratio != 1:
block.add_module(
name="exp_1x1",
module=ConvLayer(
in_channels=in_channels,
out_channels=hidden_dim,
kernel_size=1
),
)
block.add_module(
name="conv_3x3",
module=ConvLayer(
in_channels=hidden_dim,
out_channels=hidden_dim,
stride=stride,
kernel_size=3,
groups=hidden_dim # depth-wise convolution
),
)
block.add_module(
name="red_1x1",
module=ConvLayer(
in_channels=hidden_dim,
out_channels=out_channels,
kernel_size=1,
use_act=False, # 最后一层不使用激活函数
use_norm=True,
),
)
self.block = block
self.in_channels = in_channels
self.out_channels = out_channels
self.exp = expand_ratio
self.stride = stride
self.use_res_connect = (
self.stride == 1 and in_channels == out_channels and skip_connection
)
def forward(self, x: Tensor, *args, **kwargs) -> Tensor:
if self.use_res_connect: # 如果需要使用残差连接
return x + self.block(x)
else:
return self.block(x)
class MobileViTBlock(nn.Module):
"""
This class defines the `MobileViT block <https://arxiv.org/abs/2110.02178?context=cs.LG>`_
Args:
opts: command line arguments
in_channels (int): :math:`C_{in}` from an expected input of size :math:`(N, C_{in}, H, W)`
transformer_dim (int): Input dimension to the transformer unit
ffn_dim (int): Dimension of the FFN block
n_transformer_blocks (int): Number of transformer blocks. Default: 2
head_dim (int): Head dimension in the multi-head attention. Default: 32
attn_dropout (float): Dropout in multi-head attention. Default: 0.0
dropout (float): Dropout rate. Default: 0.0
ffn_dropout (float): Dropout between FFN layers in transformer. Default: 0.0
patch_h (int): Patch height for unfolding operation. Default: 8
patch_w (int): Patch width for unfolding operation. Default: 8
transformer_norm_layer (Optional[str]): Normalization layer in the transformer block. Default: layer_norm
conv_ksize (int): Kernel size to learn local representations in MobileViT block. Default: 3
no_fusion (Optional[bool]): Do not combine the input and output feature maps. Default: False
"""
def __init__(
self,
in_channels: int, # 输入通道数
transformer_dim: int, # 输入到transformer的每个token序列长度
ffn_dim: int, # feed forward network的维度
n_transformer_blocks: int = 2, # transformer block的个数
head_dim: int = 32,
attn_dropout: float = 0.0,
dropout: float = 0.0,
ffn_dropout: float = 0.0,
patch_h: int = 8,
patch_w: int = 8,
conv_ksize: Optional[int] = 3, # 卷积核大小
*args,
**kwargs
) -> None:
super().__init__()
conv_3x3_in = ConvLayer(
in_channels=in_channels,
out_channels=in_channels,
kernel_size=conv_ksize,
stride=1
)
conv_1x1_in = ConvLayer(
in_channels=in_channels,
out_channels=transformer_dim,
kernel_size=1,
stride=1,
use_norm=False,
use_act=False
)
conv_1x1_out = ConvLayer(
in_channels=transformer_dim,
out_channels=in_channels,
kernel_size=1,
stride=1
)
conv_3x3_out = ConvLayer(
in_channels=2 * in_channels,
out_channels=in_channels,
kernel_size=conv_ksize,
stride=1
)
self.local_rep = nn.Sequential()
self.local_rep.add_module(name="conv_3x3", module=conv_3x3_in)
self.local_rep.add_module(name="conv_1x1", module=conv_1x1_in)
assert transformer_dim % head_dim == 0 # 验证transformer_dim是否可以被head_dim整除
num_heads = transformer_dim // head_dim
global_rep = [
TransformerEncoder(
embed_dim=transformer_dim,
ffn_latent_dim=ffn_dim,
num_heads=num_heads,
attn_dropout=attn_dropout,
dropout=dropout,
ffn_dropout=ffn_dropout
)
for _ in range(n_transformer_blocks)
]
global_rep.append(nn.LayerNorm(transformer_dim))
self.global_rep = nn.Sequential(*global_rep)
self.conv_proj = conv_1x1_out
self.fusion = conv_3x3_out
self.patch_h = patch_h
self.patch_w = patch_w
self.patch_area = self.patch_w * self.patch_h
self.cnn_in_dim = in_channels
self.cnn_out_dim = transformer_dim
self.n_heads = num_heads
self.ffn_dim = ffn_dim
self.dropout = dropout
self.attn_dropout = attn_dropout
self.ffn_dropout = ffn_dropout
self.n_blocks = n_transformer_blocks
self.conv_ksize = conv_ksize
def unfolding(self, x: Tensor) -> Tuple[Tensor, Dict]:
patch_w, patch_h = self.patch_w, self.patch_h
patch_area = patch_w * patch_h
batch_size, in_channels, orig_h, orig_w = x.shape
new_h = int(math.ceil(orig_h / self.patch_h) * self.patch_h) # 为后文判断是否需要插值做准备
new_w = int(math.ceil(orig_w / self.patch_w) * self.patch_w) # 为后文判断是否需要插值做准备
interpolate = False
if new_w != orig_w or new_h != orig_h:
# Note: Padding can be done, but then it needs to be handled in attention function.
x = F.interpolate(x, size=(new_h, new_w), mode="bilinear", align_corners=False)
interpolate = True
# number of patches along width and height
num_patch_w = new_w // patch_w # n_w
num_patch_h = new_h // patch_h # n_h
num_patches = num_patch_h * num_patch_w # N
# [B, C, H, W] -> [B * C * n_h, p_h, n_w, p_w]
x = x.reshape(batch_size * in_channels * num_patch_h, patch_h, num_patch_w, patch_w)
# [B * C * n_h, p_h, n_w, p_w] -> [B * C * n_h, n_w, p_h, p_w]
x = x.transpose(1, 2)
# [B * C * n_h, n_w, p_h, p_w] -> [B, C, N, P] where P = p_h * p_w and N = n_h * n_w
x = x.reshape(batch_size, in_channels, num_patches, patch_area)
# [B, C, N, P] -> [B, P, N, C]
x = x.transpose(1, 3)
# [B, P, N, C] -> [BP, N, C]
x = x.reshape(batch_size * patch_area, num_patches, -1)
info_dict = {
"orig_size": (orig_h, orig_w),
"batch_size": batch_size,
"interpolate": interpolate,
"total_patches": num_patches,
"num_patches_w": num_patch_w,
"num_patches_h": num_patch_h,
}
return x, info_dict
def folding(self, x: Tensor, info_dict: Dict) -> Tensor:
n_dim = x.dim()
assert n_dim == 3, "Tensor should be of shape BPxNxC. Got: {}".format(
x.shape
)
# [BP, N, C] --> [B, P, N, C]
# 将x变成连续的张量,以便进行重塑操作
x = x.contiguous().view(
# 重塑x的第一个维度为批量大小
info_dict["batch_size"],
# 重塑x的第二个维度为每个图像块的像素数
self.patch_area,
# 重塑x的第三个维度为每个批次中的图像块总数
info_dict["total_patches"],
# 保持x的最后一个维度不变
-1
)
batch_size, pixels, num_patches, channels = x.size()
num_patch_h = info_dict["num_patches_h"]
num_patch_w = info_dict["num_patches_w"]
# [B, P, N, C] -> [B, C, N, P]
x = x.transpose(1, 3)
# [B, C, N, P] -> [B*C*n_h, n_w, p_h, p_w]
x = x.reshape(batch_size * channels * num_patch_h, num_patch_w, self.patch_h, self.patch_w)
# [B*C*n_h, n_w, p_h, p_w] -> [B*C*n_h, p_h, n_w, p_w]
x = x.transpose(1, 2)
# [B*C*n_h, p_h, n_w, p_w] -> [B, C, H, W]
x = x.reshape(batch_size, channels, num_patch_h * self.patch_h, num_patch_w * self.patch_w)
if info_dict["interpolate"]:
x = F.interpolate(
x,
size=info_dict["orig_size"],
mode="bilinear",
align_corners=False,
)
return x
def forward(self, x: Tensor) -> Tensor:
res = x
fm = self.local_rep(x) # [4, 64, 28, 28]
# convert feature map to patches
patches, info_dict = self.unfolding(fm) # [16, 196, 64]
# print(patches.shape)
# learn global representations
for transformer_layer in self.global_rep:
patches = transformer_layer(patches)
# [B x Patch x Patches x C] -> [B x C x Patches x Patch]
# Patch 所有的条状Patch的数量
# Patches 每个条状Patch的长度
fm = self.folding(x=patches, info_dict=info_dict)
fm = self.conv_proj(fm)
fm = self.fusion(torch.cat((res, fm), dim=1))
return fm
class MobileViTBlockV2(nn.Module):
"""
This class defines the `MobileViTv2 <https://arxiv.org/abs/2206.02680>`_ block
Args:
opts: command line arguments
in_channels (int): :math:`C_{in}` from an expected input of size :math:`(N, C_{in}, H, W)`
attn_unit_dim (int): Input dimension to the attention unit
ffn_multiplier (int): Expand the input dimensions by this factor in FFN. Default is 2.
n_attn_blocks (Optional[int]): Number of attention units. Default: 2
attn_dropout (Optional[float]): Dropout in multi-head attention. Default: 0.0
dropout (Optional[float]): Dropout rate. Default: 0.0
ffn_dropout (Optional[float]): Dropout between FFN layers in transformer. Default: 0.0
patch_h (Optional[int]): Patch height for unfolding operation. Default: 8
patch_w (Optional[int]): Patch width for unfolding operation. Default: 8
conv_ksize (Optional[int]): Kernel size to learn local representations in MobileViT block. Default: 3
dilation (Optional[int]): Dilation rate in convolutions. Default: 1
attn_norm_layer (Optional[str]): Normalization layer in the attention block. Default: layer_norm_2d
"""
def __init__(self,
in_channels: int,
attn_unit_dim: int,
ffn_multiplier: Optional[Union[Sequence[Union[int, float]], int, float]] = 2.0,
n_transformer_blocks: Optional[int] = 2,
attn_dropout: Optional[float] = 0.0,
dropout: Optional[float] = 0.0,
ffn_dropout: Optional[float] = 0.0,
patch_h: Optional[int] = 8,
patch_w: Optional[int] = 8,
conv_ksize: Optional[int] = 3,
*args,
**kwargs) -> None:
super(MobileViTBlockV2, self).__init__()
cnn_out_dim = attn_unit_dim
conv_3x3_in = ConvLayer(
in_channels=in_channels,
out_channels=in_channels,
kernel_size=conv_ksize,
stride=1,
use_norm=True,
use_act=True,
groups=in_channels,
)
conv_1x1_in = ConvLayer(
in_channels=in_channels,
out_channels=cnn_out_dim,
kernel_size=1,
stride=1,
use_norm=False,
use_act=False,
)
self.local_rep = nn.Sequential(conv_3x3_in, conv_1x1_in)
self.global_rep, attn_unit_dim = self._build_attn_layer(
d_model=attn_unit_dim,
ffn_mult=ffn_multiplier,
n_layers=n_transformer_blocks,
attn_dropout=attn_dropout,
dropout=dropout,
ffn_dropout=ffn_dropout,
)
self.conv_proj = ConvLayer(
in_channels=cnn_out_dim,
out_channels=in_channels,
kernel_size=1,
stride=1,
use_norm=True,
use_act=False,
)
self.patch_h = patch_h
self.patch_w = patch_w
self.patch_area = self.patch_w * self.patch_h
self.cnn_in_dim = in_channels
self.cnn_out_dim = cnn_out_dim
self.transformer_in_dim = attn_unit_dim
self.dropout = dropout
self.attn_dropout = attn_dropout
self.ffn_dropout = ffn_dropout
self.n_blocks = n_transformer_blocks
self.conv_ksize = conv_ksize
def _build_attn_layer(self,
d_model: int,
ffn_mult: Union[Sequence, int, float],
n_layers: int,
attn_dropout: float,
dropout: float,
ffn_dropout: float,
attn_norm_layer: str = "layer_norm_2d",
*args,
**kwargs) -> Tuple[nn.Module, int]:
if isinstance(ffn_mult, Sequence) and len(ffn_mult) == 2:
ffn_dims = (
np.linspace(ffn_mult[0], ffn_mult[1], n_layers, dtype=float) * d_model
)
elif isinstance(ffn_mult, Sequence) and len(ffn_mult) == 1:
ffn_dims = [ffn_mult[0] * d_model] * n_layers
elif isinstance(ffn_mult, (int, float)):
ffn_dims = [ffn_mult * d_model] * n_layers
else:
raise NotImplementedError
ffn_dims = [int((d // 16) * 16) for d in ffn_dims]
global_rep = [
LinearAttnFFN(
embed_dim=d_model,
ffn_latent_dim=ffn_dims[block_idx],
attn_dropout=attn_dropout,
dropout=dropout,
ffn_dropout=ffn_dropout,
)
for block_idx in range(n_layers)
]
global_rep.append(nn.GroupNorm(1, d_model))
return nn.Sequential(*global_rep), d_model
def forward(
self, x: Union[Tensor, Tuple[Tensor]], *args, **kwargs
) -> Union[Tensor, Tuple[Tensor, Tensor]]:
if isinstance(x, Tuple) and len(x) == 2:
# for spatio-temporal data (e.g., videos)
return self.forward_temporal(x=x[0], x_prev=x[1])
elif isinstance(x, Tensor):
# for image data
return self.forward_spatial(x)
else:
raise NotImplementedError
def forward_spatial(self, x: Tensor, *args, **kwargs) -> Tensor:
x = self.resize_input_if_needed(x)
# learn global representations on all patches
fm = self.local_rep(x)
patches, output_size = self.unfolding_pytorch(fm)
# print(f"original x.shape = {patches.shape}")
patches = self.global_rep(patches)
# [B x Patch x Patches x C] --> [B x C x Patches x Patch]
fm = self.folding_pytorch(patches=patches, output_size=output_size)
fm = self.conv_proj(fm)
return fm
def forward_temporal(
self, x: Tensor, x_prev: Optional[Tensor] = None
) -> Union[Tensor, Tuple[Tensor, Tensor]]:
x = self.resize_input_if_needed(x)
fm = self.local_rep(x)
patches, output_size = self.unfolding_pytorch(fm)
for global_layer in self.global_rep:
if isinstance(global_layer, LinearAttnFFN):
patches = global_layer(x=patches, x_prev=x_prev)
else:
patches = global_layer(patches)
fm = self.folding_pytorch(patches=patches, output_size=output_size)
fm = self.conv_proj(fm)
return fm, patches
def resize_input_if_needed(self, x: Tensor) -> Tensor:
# print(f"original x.shape = {x.shape}")
batch_size, in_channels, orig_h, orig_w = x.shape
if orig_h % self.patch_h != 0 or orig_w % self.patch_w != 0:
new_h = int(math.ceil(orig_h / self.patch_h) * self.patch_h)
new_w = int(math.ceil(orig_w / self.patch_w) * self.patch_w)
x = F.interpolate(
x, size=(new_h, new_w), mode="bilinear", align_corners=True
)
# print(f"changed x.shape = {x.shape}")
return x
def unfolding_pytorch(self, feature_map: Tensor) -> Tuple[Tensor, Tuple[int, int]]:
batch_size, in_channels, img_h, img_w = feature_map.shape
# [B, C, H, W] --> [B, C, P, N]
patches = F.unfold(
feature_map,
kernel_size=(self.patch_h, self.patch_w),
stride=(self.patch_h, self.patch_w),
)
patches = patches.reshape(
batch_size, in_channels, self.patch_h * self.patch_w, -1
)
return patches, (img_h, img_w)
def folding_pytorch(self, patches: Tensor, output_size: Tuple[int, int]) -> Tensor:
batch_size, in_dim, patch_size, n_patches = patches.shape
# [B, C, P, N]
patches = patches.reshape(batch_size, in_dim * patch_size, n_patches)
feature_map = F.fold(
patches,
output_size=output_size,
kernel_size=(self.patch_h, self.patch_w),
stride=(self.patch_h, self.patch_w),
)
return feature_map
class MobileViT(nn.Module):
"""
This class implements the `MobileViT architecture <https://arxiv.org/abs/2110.02178?context=cs.LG>`_
"""
def __init__(self, model_cfg: Dict, num_classes: int = 1000):
super().__init__()
image_channels = 3
out_channels = 16
self.conv_1 = ConvLayer(
in_channels=image_channels,
out_channels=out_channels,
kernel_size=3,
stride=2
)
self.layer_1, out_channels = self._make_layer(input_channel=out_channels, cfg=model_cfg["layer1"])
self.layer_2, out_channels = self._make_layer(input_channel=out_channels, cfg=model_cfg["layer2"])
self.layer_3, out_channels = self._make_layer(input_channel=out_channels, cfg=model_cfg["layer3"])
self.layer_4, out_channels = self._make_layer(input_channel=out_channels, cfg=model_cfg["layer4"])
self.layer_5, out_channels = self._make_layer(input_channel=out_channels, cfg=model_cfg["layer5"])
exp_channels = min(model_cfg["last_layer_exp_factor"] * out_channels, 960)
self.conv_1x1_exp = ConvLayer(
in_channels=out_channels,
out_channels=exp_channels,
kernel_size=1
)
self.classifier = nn.Sequential() # 有可能会被冻结,来进行网络微调
self.classifier.add_module(name="global_pool", module=nn.AdaptiveAvgPool2d(1))
self.classifier.add_module(name="flatten", module=nn.Flatten())
if 0.0 < model_cfg["cls_dropout"] < 1.0:
self.classifier.add_module(name="dropout", module=nn.Dropout(p=model_cfg["cls_dropout"]))
self.classifier.add_module(name="fc", module=nn.Linear(in_features=exp_channels, out_features=num_classes))
# weight init
self.apply(self.init_parameters)
def _make_layer(self, input_channel, cfg: Dict) -> Tuple[nn.Sequential, int]:
block_type = cfg.get("block_type", "mobilevit")
if block_type.lower() == "mobilevit":
return self._make_mit_layer(input_channel=input_channel, cfg=cfg)
else:
return self._make_mobilenet_layer(input_channel=input_channel, cfg=cfg)
@staticmethod
def _make_mobilenet_layer(input_channel: int, cfg: Dict) -> Tuple[nn.Sequential, int]:
output_channels = cfg.get("out_channels")
num_blocks = cfg.get("num_blocks", 2)
expand_ratio = cfg.get("expand_ratio", 4)
block = []
for i in range(num_blocks):
stride = cfg.get("stride", 1) if i == 0 else 1
layer = InvertedResidual(
in_channels=input_channel,
out_channels=output_channels,
stride=stride,
expand_ratio=expand_ratio
)
block.append(layer)
input_channel = output_channels
return nn.Sequential(*block), input_channel
@staticmethod
def _make_mit_layer(input_channel: int, cfg: Dict) -> [nn.Sequential, int]:
stride = cfg.get("stride", 1)
block = []
if stride == 2:
layer = InvertedResidual(
in_channels=input_channel,
out_channels=cfg.get("out_channels"),
stride=stride,
expand_ratio=cfg.get("mv_expand_ratio", 4)
)
block.append(layer)
input_channel = cfg.get("out_channels")
transformer_dim = cfg["transformer_channels"]
ffn_dim = cfg.get("ffn_dim")
num_heads = cfg.get("num_heads", 4)
head_dim = transformer_dim // num_heads
if transformer_dim % head_dim != 0:
raise ValueError("Transformer input dimension should be divisible by head dimension. "
"Got {} and {}.".format(transformer_dim, head_dim))
block.append(MobileViTBlock(
in_channels=input_channel,
transformer_dim=transformer_dim,
ffn_dim=ffn_dim,
n_transformer_blocks=cfg.get("transformer_blocks", 1),
patch_h=cfg.get("patch_h", 2),
patch_w=cfg.get("patch_w", 2),
dropout=cfg.get("dropout", 0.1),
ffn_dropout=cfg.get("ffn_dropout", 0.0),
attn_dropout=cfg.get("attn_dropout", 0.1),
head_dim=head_dim,
conv_ksize=3
))
return nn.Sequential(*block), input_channel
@staticmethod
def init_parameters(m):
if isinstance(m, nn.Conv2d):
if m.weight is not None:
nn.init.kaiming_normal_(m.weight, mode="fan_out")
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, (nn.LayerNorm, nn.BatchNorm2d)):
if m.weight is not None:
nn.init.ones_(m.weight)
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, (nn.Linear,)):
if m.weight is not None:
nn.init.trunc_normal_(m.weight, mean=0.0, std=0.02)
if m.bias is not None:
nn.init.zeros_(m.bias)
else:
pass
def forward(self, x):
unique_tensors = {}
x = self.conv_1(x)
width, height = x.shape[2], x.shape[3]
unique_tensors[(width, height)] = x
x = self.layer_1(x)
width, height = x.shape[2], x.shape[3]
unique_tensors[(width, height)] = x
x = self.layer_2(x)
width, height = x.shape[2], x.shape[3]
unique_tensors[(width, height)] = x
x = self.layer_3(x)
width, height = x.shape[2], x.shape[3]
unique_tensors[(width, height)] = x
x = self.layer_4(x)
width, height = x.shape[2], x.shape[3]
unique_tensors[(width, height)] = x
x = self.layer_5(x)
width, height = x.shape[2], x.shape[3]
unique_tensors[(width, height)] = x
x = self.conv_1x1_exp(x)
width, height = x.shape[2], x.shape[3]
unique_tensors[(width, height)] = x
result_list = list(unique_tensors.values())[-4:]
return result_list
def mobile_vit_xx_small(num_classes: int = 1000):
# pretrain weight link
# https://docs-assets.developer.apple.com/ml-research/models/cvnets/classification/mobilevit_xxs.pt
config = get_config("xx_small")
m = MobileViT(config, num_classes=num_classes)
return m
def mobile_vit_x_small(num_classes: int = 1000):
# pretrain weight link
# https://docs-assets.developer.apple.com/ml-research/models/cvnets/classification/mobilevit_xs.pt
config = get_config("x_small")
m = MobileViT(config, num_classes=num_classes)
return m
def mobile_vit_small(num_classes: int = 1000):
# pretrain weight link
# https://docs-assets.developer.apple.com/ml-research/models/cvnets/classification/mobilevit_s.pt
config = get_config("small")
m = MobileViT(config, num_classes=num_classes)
return m
if __name__ == "__main__":
# Generating Sample image
image_size = (1, 3, 640, 640)
image = torch.rand(*image_size)
# Model
model = mobile_vit_xx_small()
out = model(image)
print(out.size())
二、如何添加
2.1 修改一
ultralytics/nn/modules文件夹下建立一个目录’Addmodules’文件夹,然后在其内部建立一个MobileViTv1.py文件,将上述代码复制粘贴进去即可 ;
2.2 修改二
在该目录下创建一个新的py文件名字为’init.py’,然后在其内部添加如下代码:
from .MobileViTv1 import *
2.3 修改三
到如下文件’ultralytics/nn/tasks.py’进行导入和注册我们的模块,在首行添加如下语句:
from .Addmodules import *
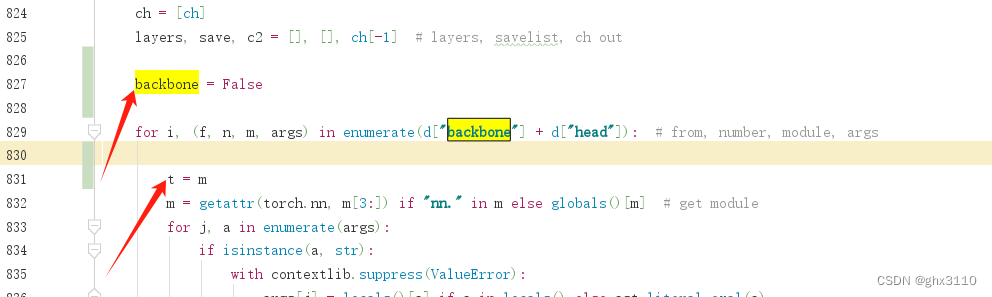
2.4 修改四
在task.py的parse_model类中,添加如下两句:
2.5 修改五
parse_model中添加如下代码:
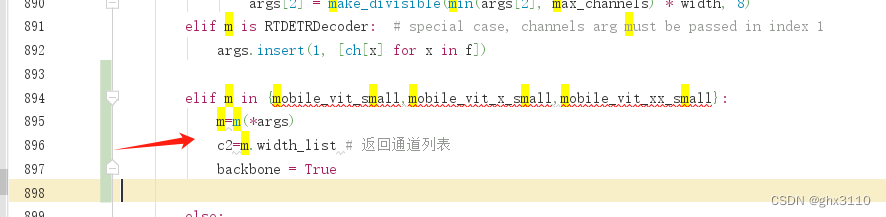
elif m in {自行添加对应的模型即可,下面都是一样的}:
m = m(*args)
c2 = m.width_list # 返回通道列表
backbone = True
2.6 修改六
在修改五的下方,添加如下代码:
if isinstance(c2, list):
m_ = m
m_.backbone = True
else:
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
m.np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type = i + 4 if backbone else i, f, t # attach index, 'from' index, type
else:
c2 = ch[f]
2.7 修改七
将如下图中的代码,替换为下方代码:
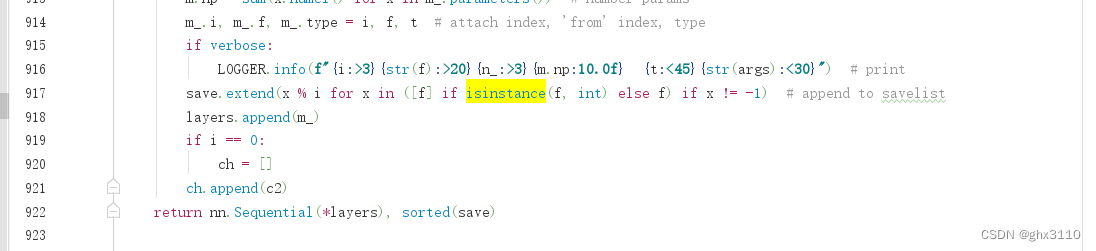
if verbose:
LOGGER.info(f'{i:>3}{str(f):>20}{n_:>3}{m.np:10.0f} {t:<45}{str(args):<30}') # print
save.extend(x % (i + 4 if backbone else i) for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list):
ch.extend(c2)
if len(c2) != 5:
ch.insert(0, 0)
else:
ch.append(c2)
2.8 修改八
修改task.py中前向传播中的一个部分, 已经离开了parse_model方法了。
将如下图中代码替换为下方代码:
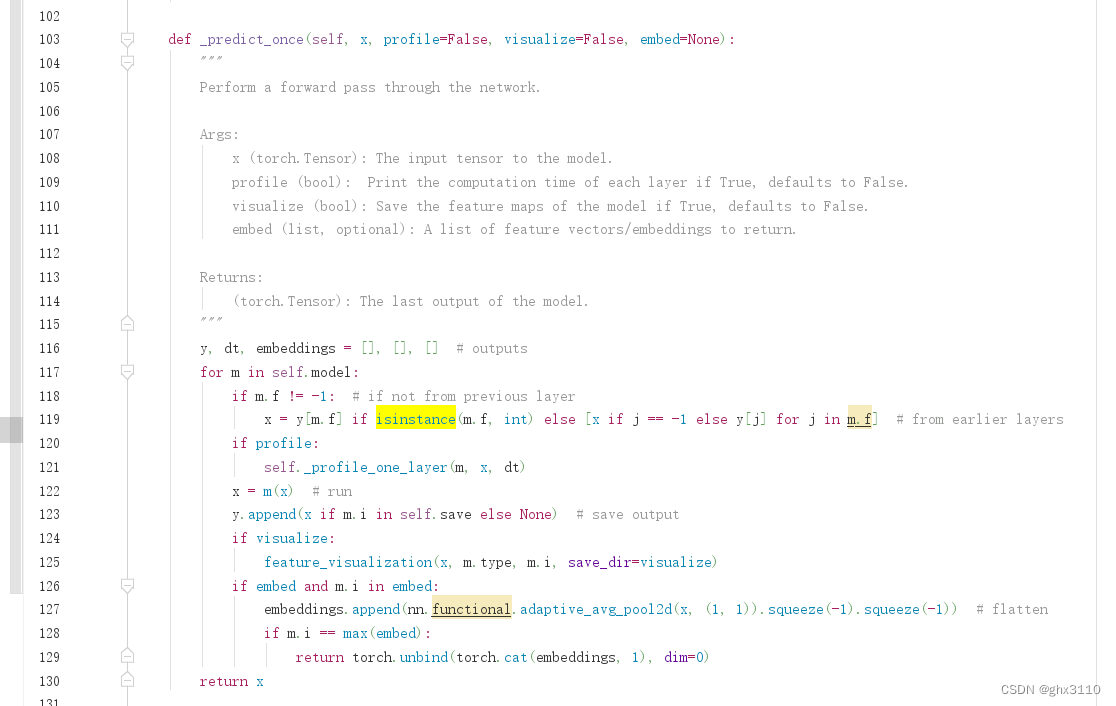
def _predict_once(self, x, profile=False, visualize=False):
"""
Perform a forward pass through the network.
Args:
x (torch.Tensor): The input tensor to the model.
profile (bool): Print the computation time of each layer if True, defaults to False.
visualize (bool): Save the feature maps of the model if True, defaults to False.
Returns:
(torch.Tensor): The last output of the model.
"""
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, 'backbone'):
x = m(x)
if len(x) != 5: # 0 - 5
x.insert(0, None)
for index, i in enumerate(x):
if index in self.save:
y.append(i)
else:
y.append(None)
x = x[-1] # 最后一个输出传给下一层
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
return x
三、yaml文件配置
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# 支持下面的版本均可替换
# ['mobile_vit_small', 'mobile_vit_x_small', 'mobile_vit_xx_small']
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, mobile_vit_xx_small, []] # 4
- [-1, 1, SPPF, [1024, 5]] # 5
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 6
- [[-1, 3], 1, Concat, [1]] # 7 cat backbone P4
- [-1, 3, C2f, [512]] # 8
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 9
- [[-1, 2], 1, Concat, [1]] # 10 cat backbone P3
- [-1, 3, C2f, [256]] # 11 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]] # 12
- [[-1, 8], 1, Concat, [1]] # 13 cat head P4
- [-1, 3, C2f, [512]] # 14 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]] # 15
- [[-1, 5], 1, Concat, [1]] # 16 cat head P5
- [-1, 3, C2f, [1024]] # 17 (P5/32-large)
- [[11, 14, 17], 1, Detect, [nc]] # Detect(P3, P4, P5)
然后即可成功运行: