通信的目的:将一个设备的数据传送到另一个设备,扩展硬件系统
通信接口区别
| 名称 | 引脚 | 双工 | 时钟 | 电平 | 设备 |
|---|---|---|---|---|---|
| USART | TX、RX | 全双工 | 异步 | 单端 | 点对点 |
| I2C | SCL、SDA | 半双工 | 同步 | 单端 | 多设备 |
| SPI | SCLK、MOSI、MISO、CS | 全双工 | 同步 | 单端 | 多设备 |
| CAN | CAN_H、CAN_L | 半双工 | 异步 | 差分 | 多设备 |
| USB | DP、DM | 半双工 | 异步 | 差分 | 点对点 |
以下是一些常见概念:
-
双工:通信设备是否同时能进行双方通信,一般全双工的都有两根通讯线,如 USART 就有TX/RX这两根通讯线。 I2C 只有一根通讯线SDA(另外一根是时钟线),所以 I2C 半双工的通信
-
时钟:分为同步异步
同步:有单独的时钟信号线,保证通讯时用的是同一个时钟
异步:没有单独的时钟信号线,只能双方规定制定的时钟频率。如串口发送方中可以指定波特率来实现间隔多少时间向TX发送一个数据(变化一次高低电平),那么接收方也要根据这个波特率来接收数据(间隔多长时间读取一次RX的电平) -
电平:
单端:电平参考需要一样,即如串口通讯中,发送方与接收方需要共地,保证它们的参考电压是一样的。
差分:不需要共同的参考电平,是根据两根通讯线的电平差异来获取结果的。如两根通讯线的电平不同则表示结果0,相同则表示结果1。 -
电平标准:
即通讯协议中,双方数据1和0的表达方式标准。即传输过程中人为规定电压与数据的对应关系,常用的有以下3种,抗干扰性RS485 > RS232 > TTL- TTL电平:+3.3V或+5V表示1,0V表示0
- RS232电平:(-3 , -15V)表示1,(+3 , +15V)表示数据0
- RS485标准:使用的不是绝对电压,而是两根信号线的相对电压(差分信号)作为标准。两根线电压差(+2, +6V)表示1,相差(-2, -6V)表示0。抗干扰信号非常强,距离可达到上千米
- 当电平标准不一致时,需要加电平转换芯片
-
波特率
用于指定发送的频率和接收的频率,假如发送方1秒发送1位,那么接收方也必须1秒接收(读取一次RX的电平)1位,假如接收方频率更快,那么有可能相同一个数据被接收方多次接收。其单位是bps,即1秒发
送的位数。1000bps就是1秒发送1000位数据,1位数据的发送耗时是1ms(二进制下,1位=1baud) -
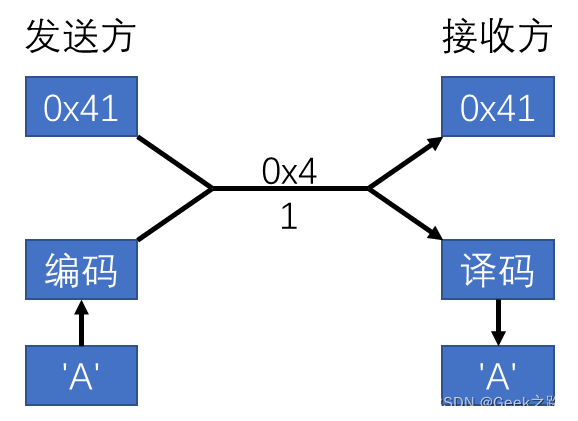
数据模式
- HEX模式/十六进制模式/二进制模式:以原始数据的形式显示
- 文本模式/字符模式:以原始数据编码后的形式显示
- 如果要显示汉字,就得制定汉字的字符集如GB2312、GBK,另外Unicode字符集:全球的语言,最常用的传输形式是UTF8
串口通信
1、参数
-
波特率
-
1位起始位(标志一个数据帧的开始,固定为低电平)
-
1位停止位(标志一个数据帧的结束,固定为高电平)一般停止位为1位,也可设置为0.5、1、1.5、2,停止位的位数越多,不同时钟同步的容忍程度越大,但是数据传输率同时也越慢。
-
8/9位数据位(是否奇偶校验,如偶校验:第9位保证9位数据中1的个数为偶数),数据低位先行
因此,在无奇偶校验的情况下一帧的数据长度为10位。
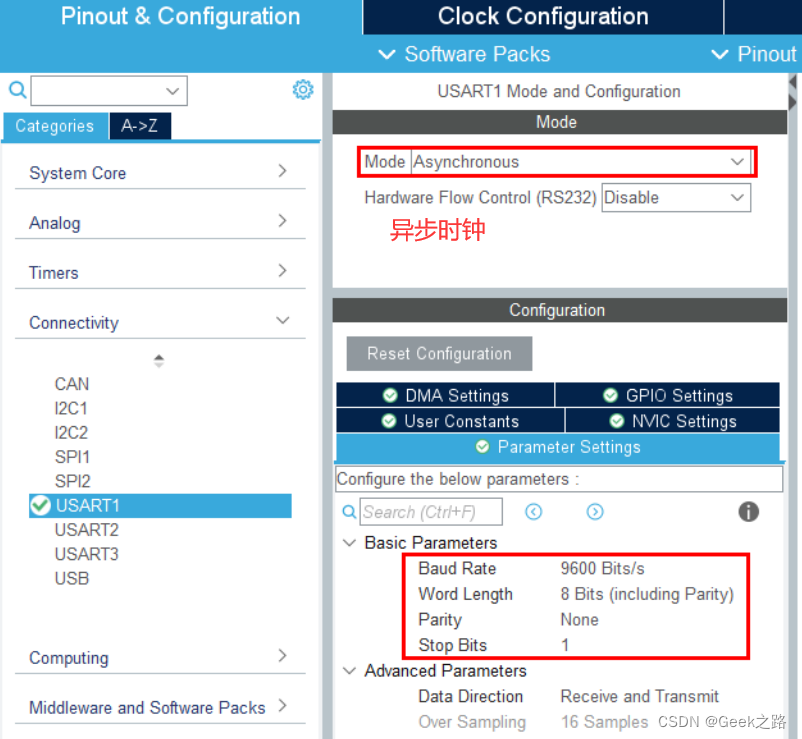
3、利用CubMX配置串口通信
配置只需要一步,关键掌握如何收发各种格式的数据。
发送数据
//1、发送一个字节
void hhSerialSendByte(uint8_t Byte){
HAL_UART_Transmit(&huart1, &Byte, 1, HAL_MAX_DELAY);
}
//2、发送一个数组
void hhSerialSendArray(uint8_t *Array,uint16_t Length){
for(uint16_t i=0;i<Length;i++){
hhSerialSendByte(Array[i]);
}
}
//3、发送一个字符串
void hhSerialSendString(char * mString){
for(uint16_t i=0;mString[i]!='\0';i++){
hhSerialSendByte(mString[i]);
}
}
//4、发送一个数字
uint32_t Serial_Pow(uint32_t X, uint32_t Y){
uint32_t Result = 1;
while (Y --){
Result *= X;
}
return Result;
}
void hhSerial_SendNumber(uint32_t Number, uint8_t Length){
uint8_t i;
for (i = 0; i < Length; i ++)
{
hhSerialSendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
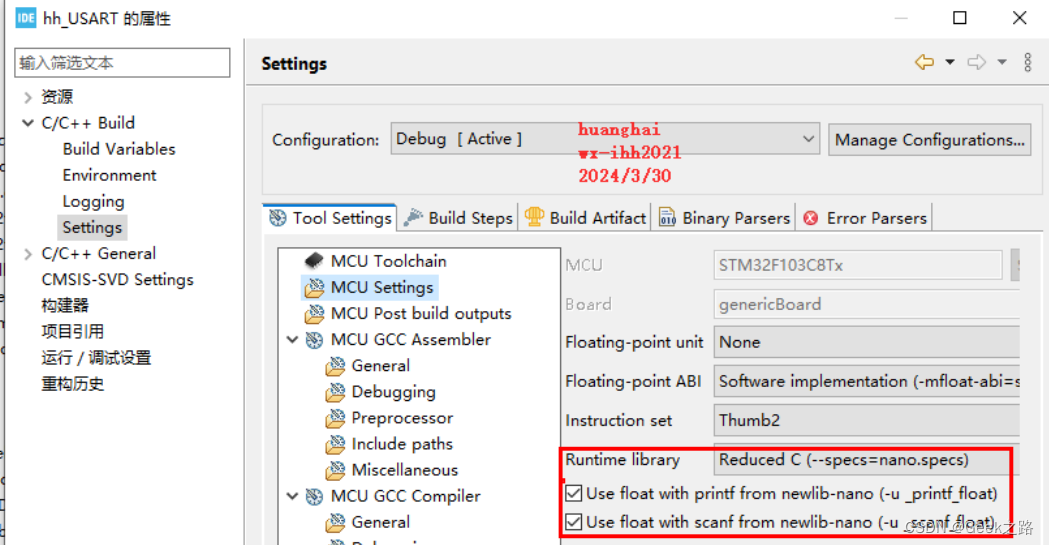
//5、发送浮点数 前设置
#include <stdarg.h>
#include "stdio.h"
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
hhSerialSendString(String);
}
接收数据
1、查询法接收
在前面配置好USART的波特率等信息后,循环不断查询是否有数据传输过来
uint8_t ByteRecv;
int main(void){
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
OLED_Init();
OLED_Clear();
while (1){
HAL_UART_Receive(&huart1, &ByteRecv, 1, HAL_MAX_DELAY);
hhSerialSendByte(ByteRecv);
}
}
2、中断法接收
//1.单字节发送
void hhSerialSendByte(uint8_t Byte){
HAL_UART_Transmit(&huart1, &Byte, 1, HAL_MAX_DELAY);
}
uint8_t Serial_RxFlag;
uint8_t Serial_GetRxFlag(void){
if (Serial_RxFlag == 1){
Serial_RxFlag = 0;
return 1;
}
return 0;
}
uint8_t ByteRecv;
//接收中断函数
HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){
if (huart == &huart1){
Serial_RxFlag=1;//已接收标志位,说明已经接收完一次
HAL_UART_Receive_IT(&huart1, &ByteRecv, 1);//接收了一次后需要再次打开接收中断为下次中断接收做准备
}
}
int main(void){
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
OLED_Init();
OLED_Clear();
HAL_UART_Receive_IT(&huart1, &ByteRecv, 1);//启动中断接收一个字节
OLED_ShowString(1, 1, "RxData:");
while (1){
if (Serial_GetRxFlag() == 1){
hhSerialSendByte(ByteRecv);//将接收到的数据重新发送返回给电脑串口
OLED_ShowHexNum(1, 8, ByteRecv, 2);
}
}
}