点云的处理任务
场景语义分割

物体的三维表达方法(3D representations):
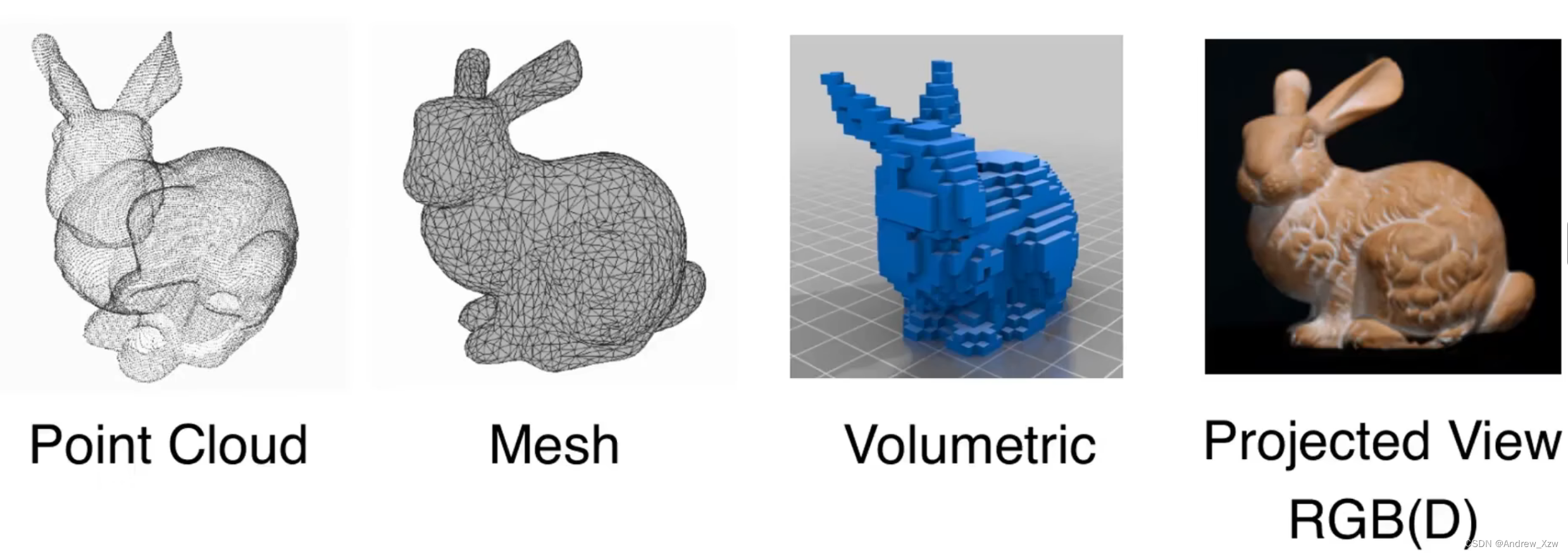
点云:是由物体表面上许多点数据来表征这个物体。最接近原始传感器数据,且具有丰富的几何信息。
Mesh:用三角形面片和正方形面片拼成一个物体。
Volumetric:一种栅格化的表征方法。
Projected View:通过图片来不同的角度来构成的一个立体的兔子。(附有RGB颜色信息和D深度信息)。
点云数据的获取方法:
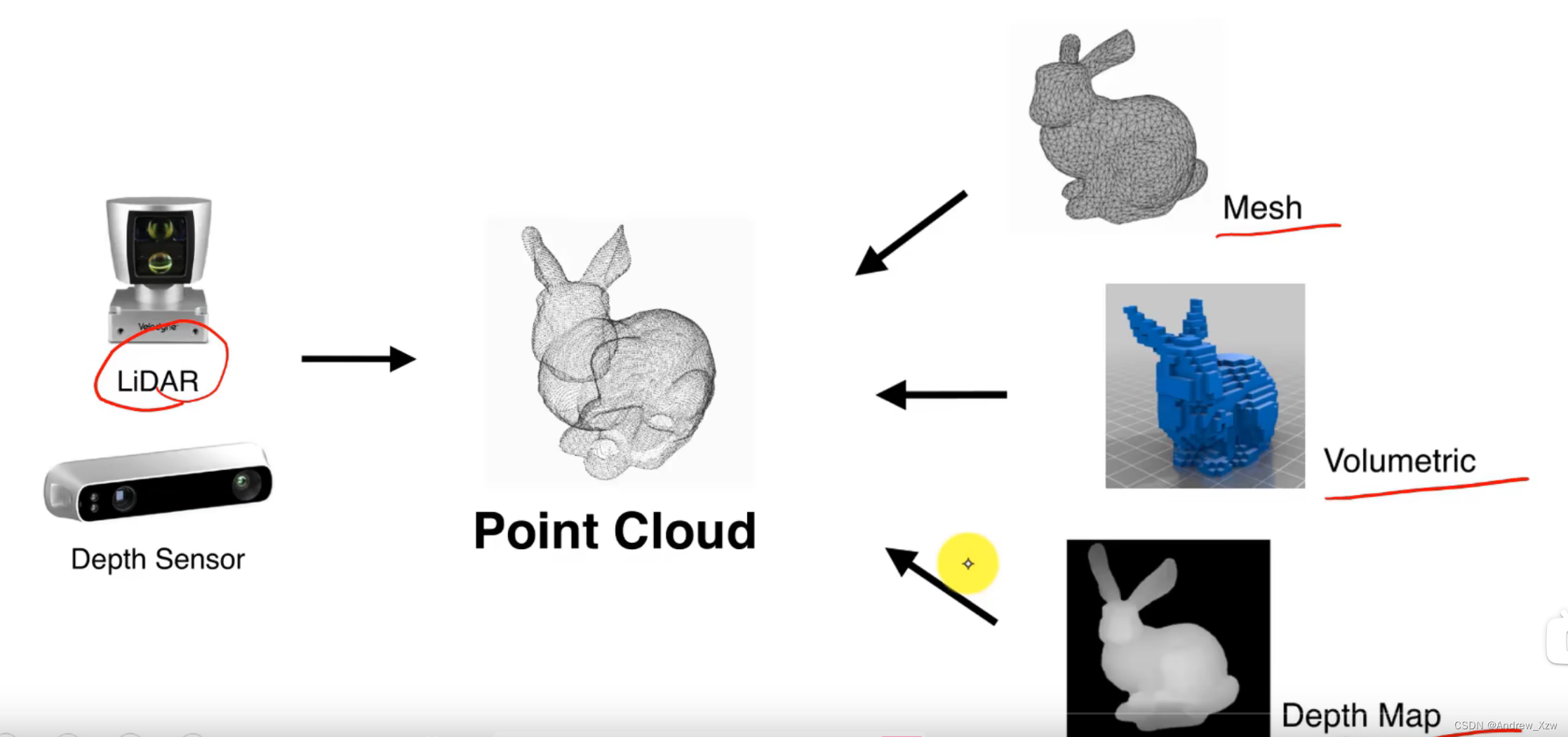
(1)可以通过激光雷达扫描所得到;
(2)通过摄影的方法,获取RGB图像,再通过一些方法获取深度信息。最后通过透视即可反推出空间中的一些点云数据。
Depth Sensor(带有深度传感器的摄像头)这种相对图中其他方法更为接近原始传感器数据。过去还需要经过点云对准、去噪等处理。
比如:较为先进的,可以通过多个摄像头进行倾斜摄影来构造点云数据。
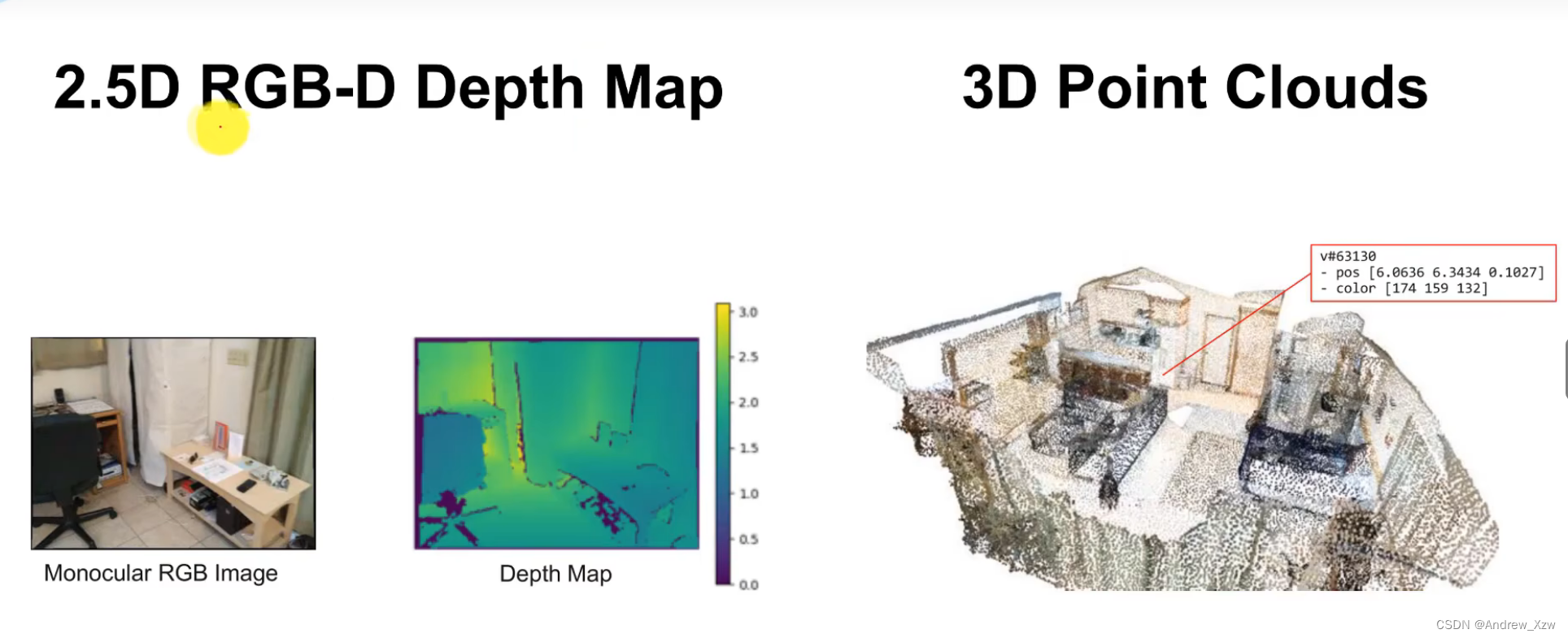
点云一般具有的基本信息:位置信息三维坐标:(x,y,z),颜色信息。
另外还可以通过别的方法来获取:强度信息(intensity)、法向量的信息等。
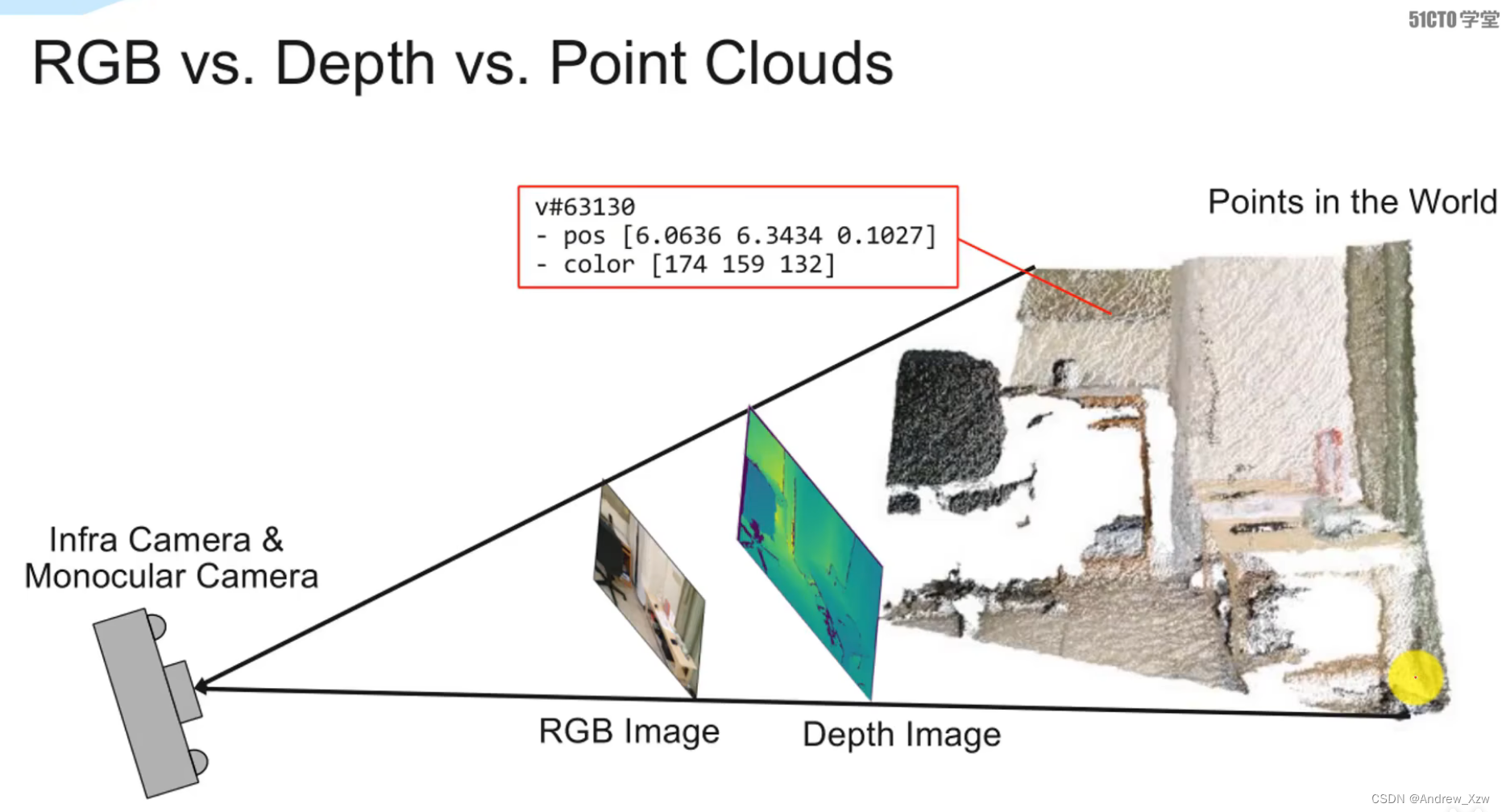
严格来说呢,RGB+D这种结合,只能算为2.5D。
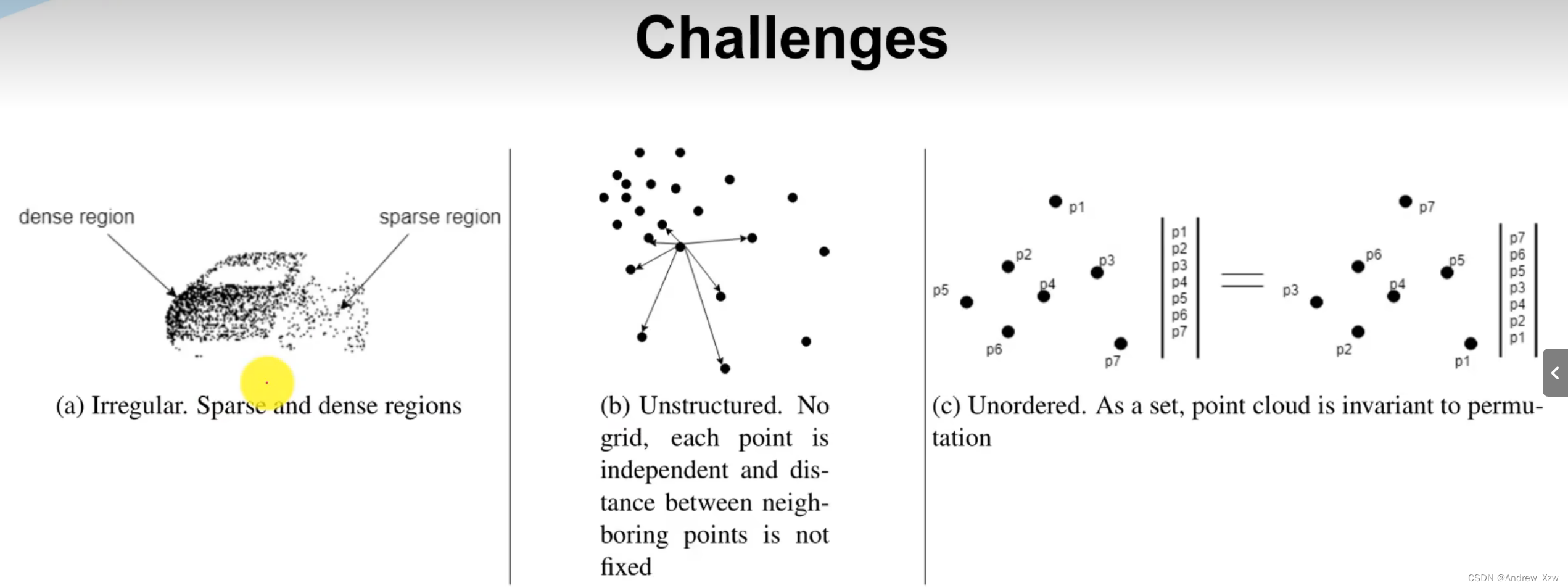
点云数据处理的挑战:
(1)不规则:密集和稀疏的区域不规则。通常激光雷达获取的数据,近密远疏。
(2)非结构化。
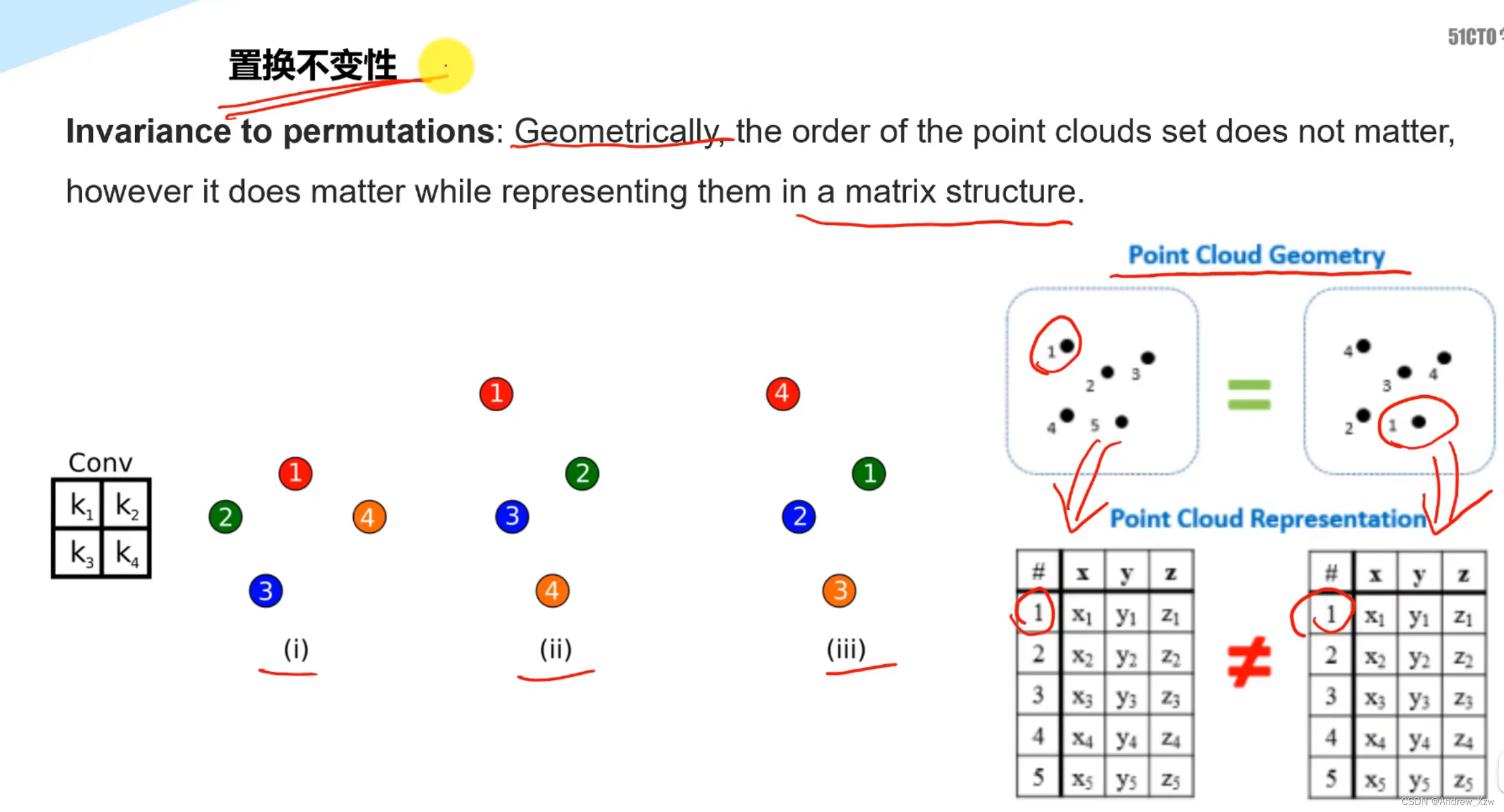
(3)无序的。这就带来置换不变性:从几何上来说,这个点云的顺序是没有关系的,不同的点排不同的序还是同一个点云。
对于点云的处理:
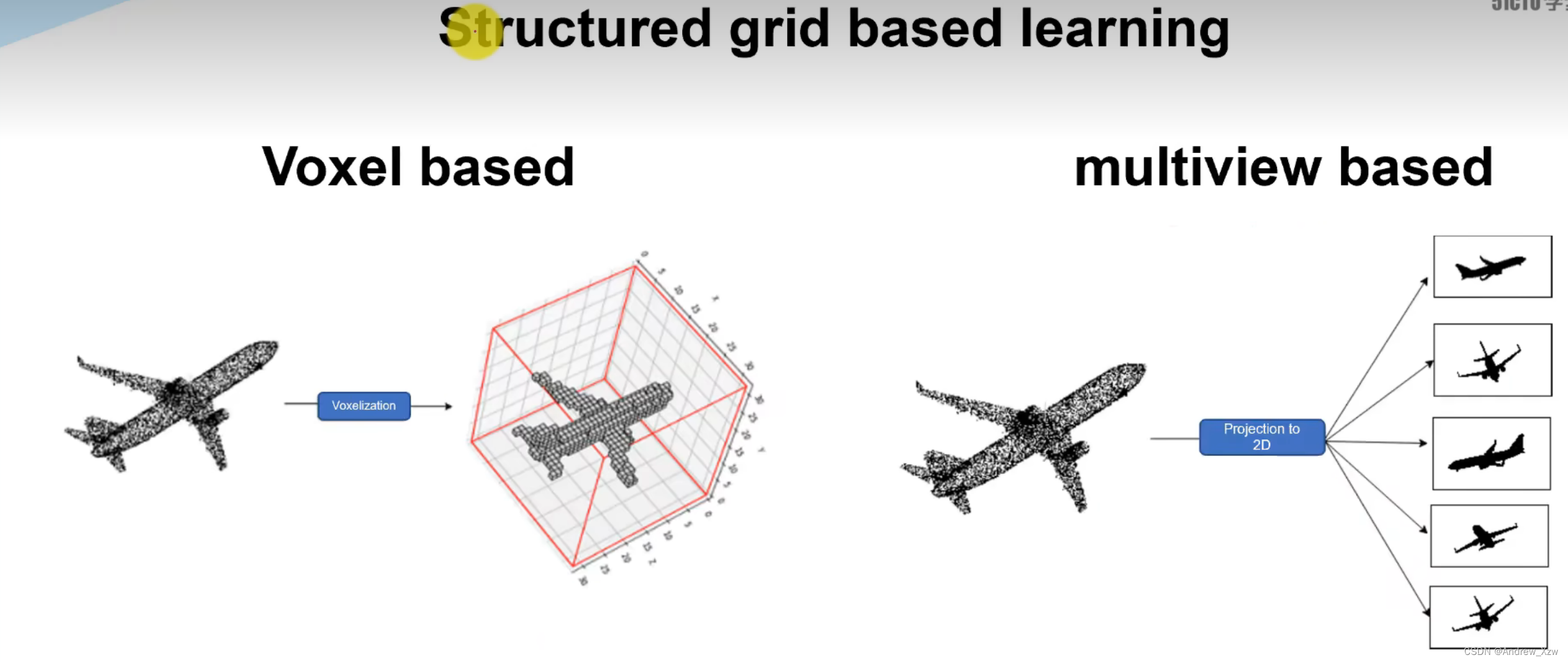
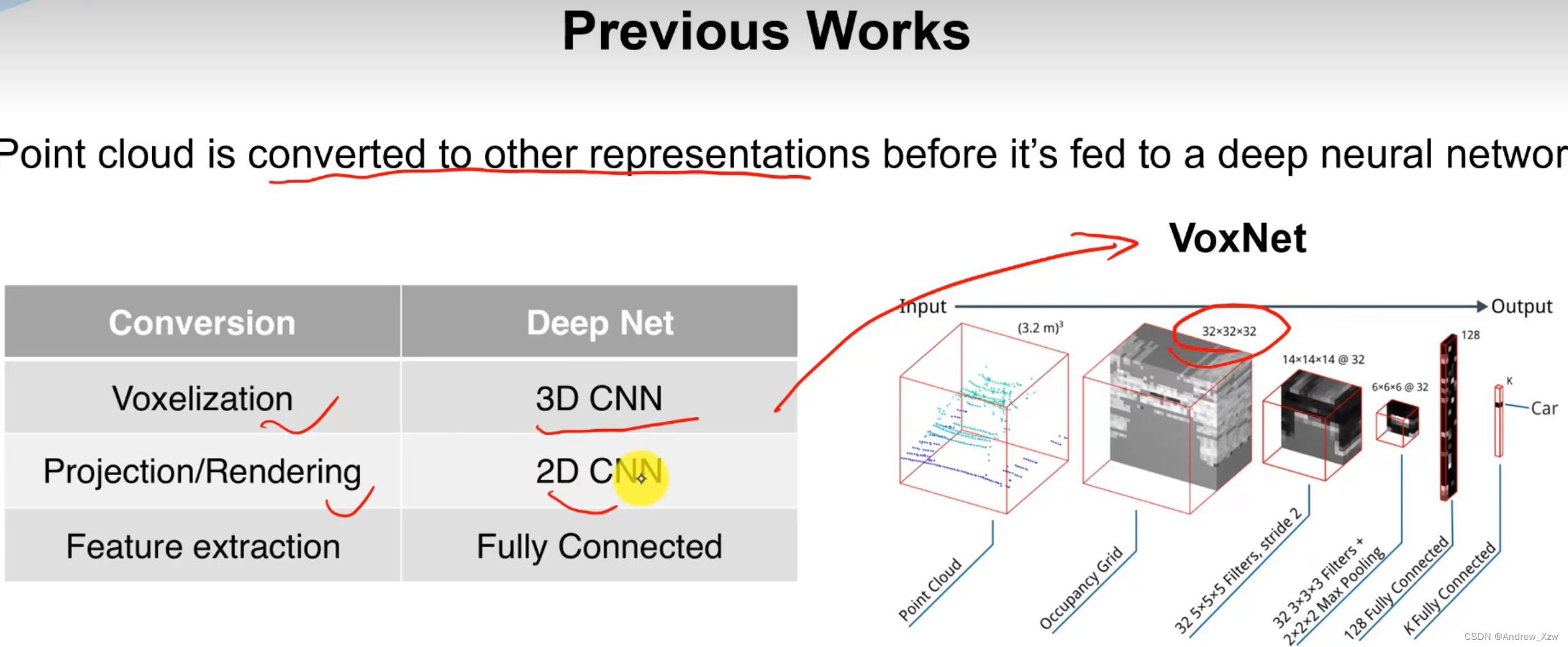
(1)结构化表示学习:
1.1基于体素:将非结构化点云数据,转换为右边的很多小栅格所表示的表达方式来处理。
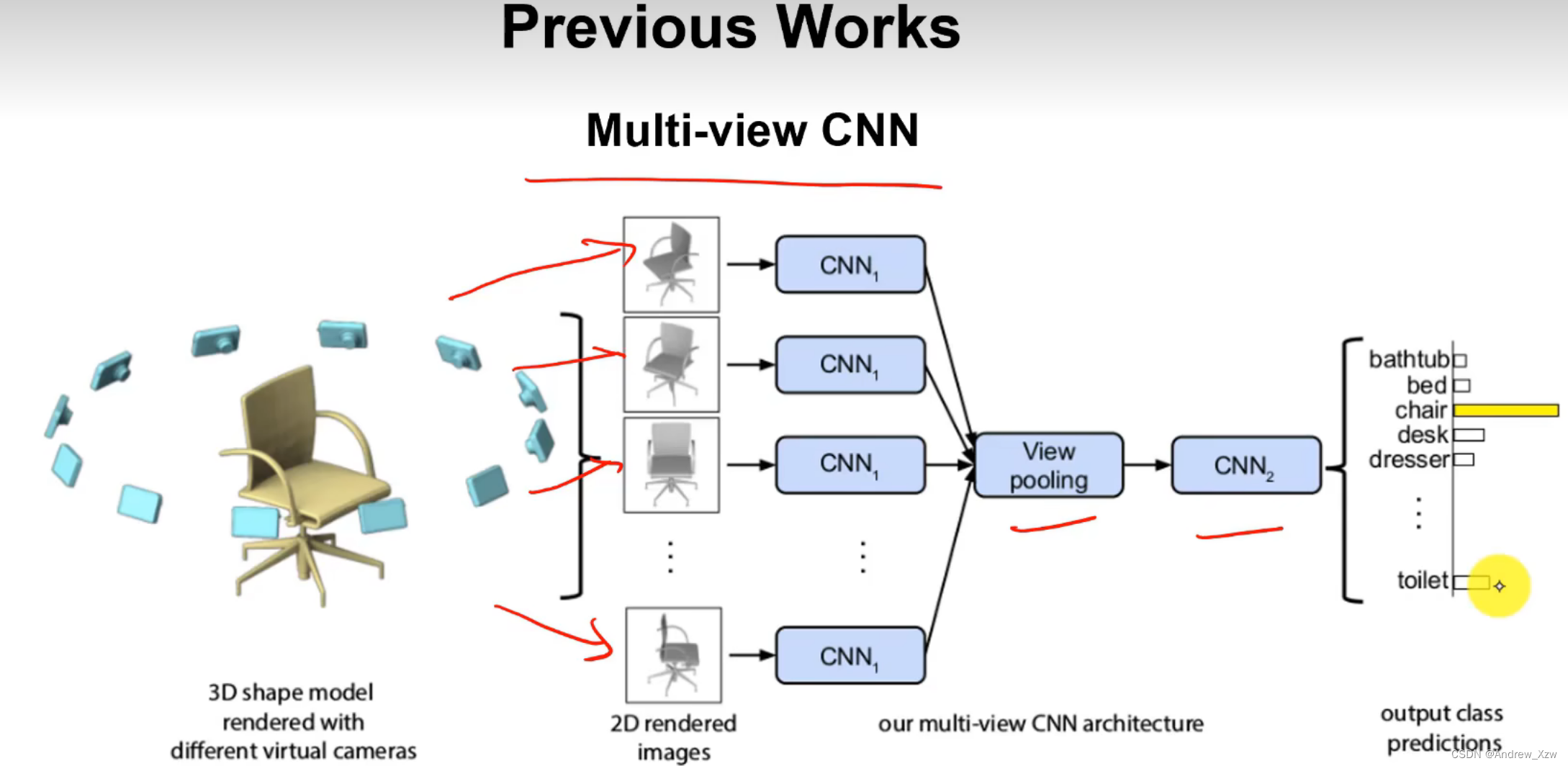
1.2基于多视角:将点云数据通过各个角度来进行投影,得到一个二维视角的一个图像。后续通过比如:CNN进行处理。
(2)深度学习直接在原始点云数据上进行处理:
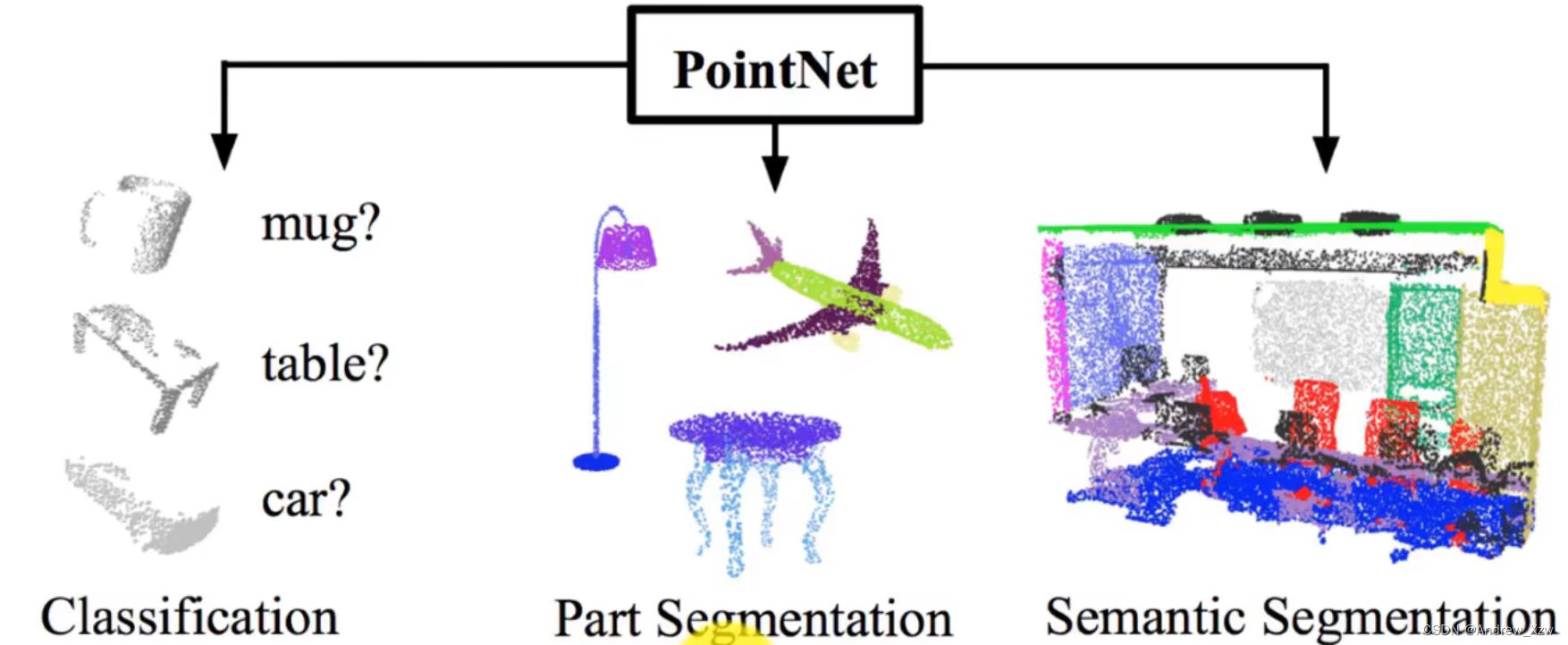
PointNet–直接处理点云数据的深度学习技术的开山之作
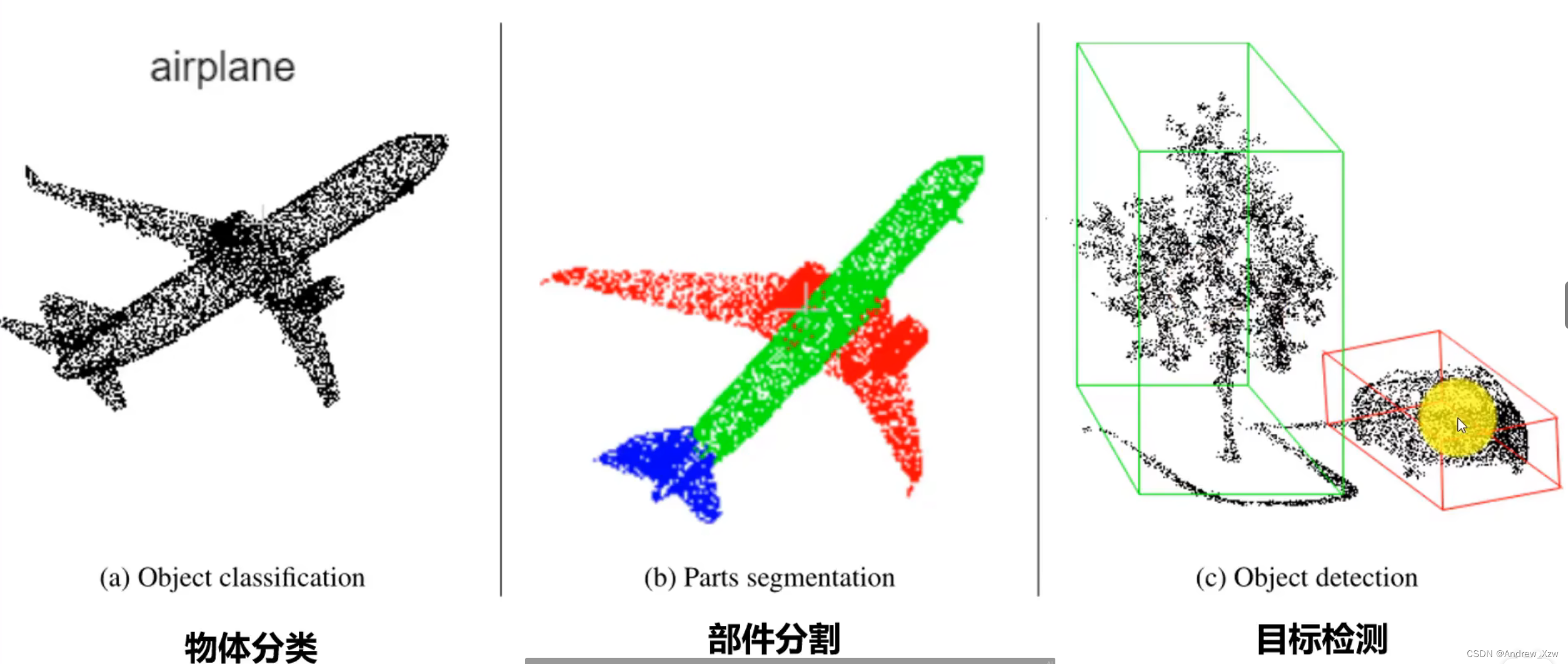
是一个可以完成多种任务的统一框架:
分类、部件分割、场景的语义分割
2.1基于点的方法:PointNet、PointNet++
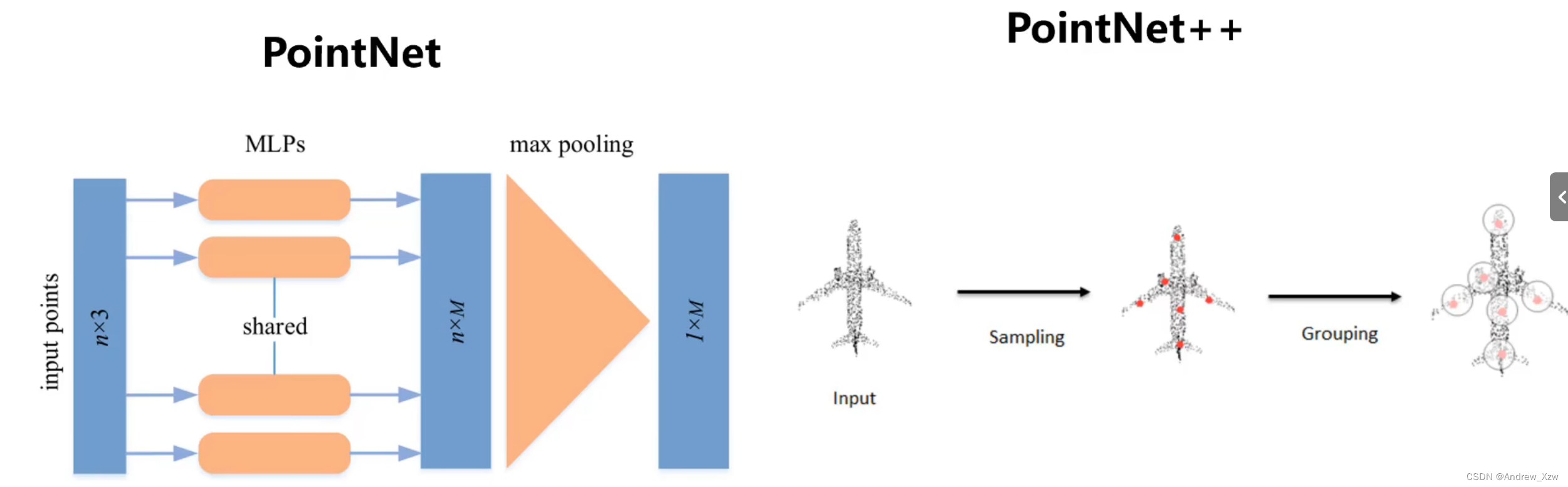
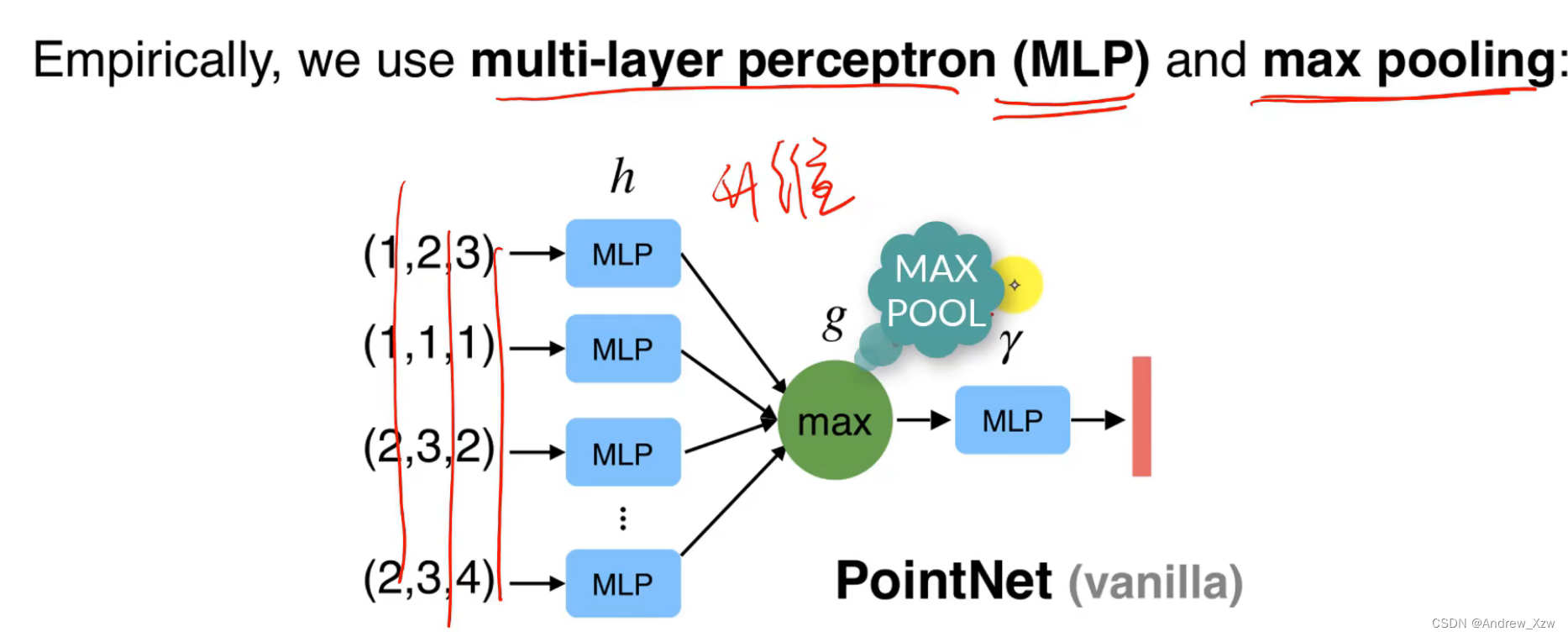
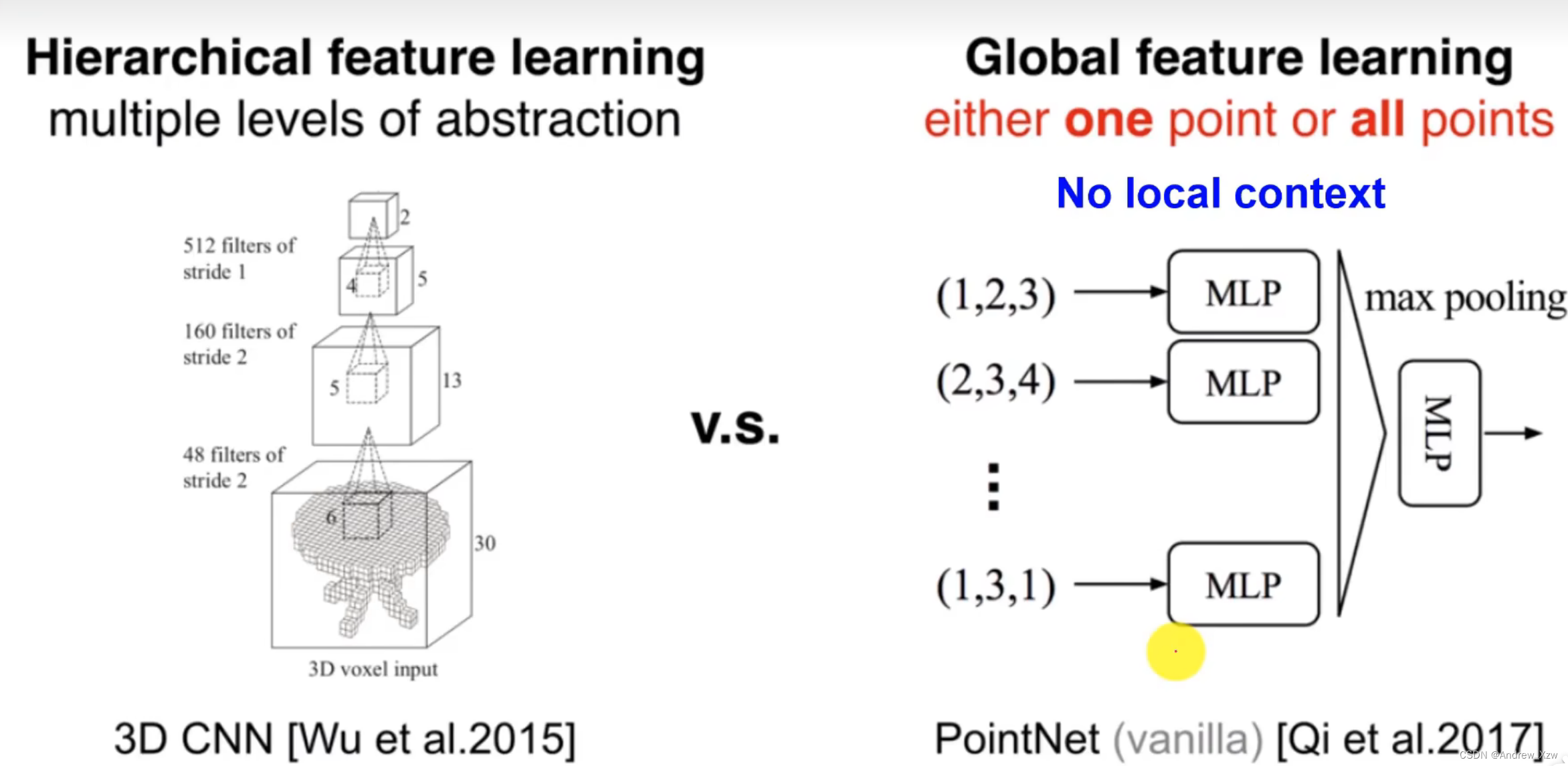
PointNet(没有考虑局部的上下文信息):就是对输入的点进行share的多层感知机MLP处理后,经过最大池化,来得到点云的特征。
PointNet++:通过Sampling采样,然后Grouping后,来获得局部信息,以提升性能。
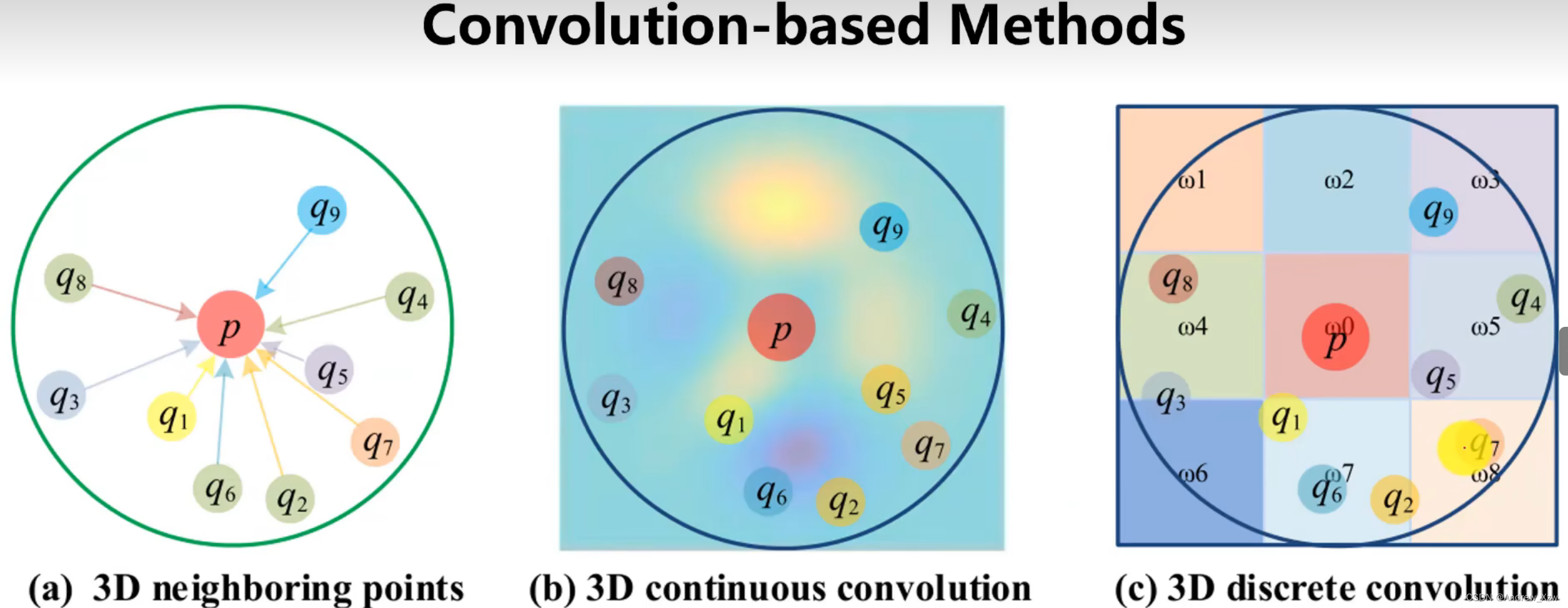
(3)基于卷积的方法:
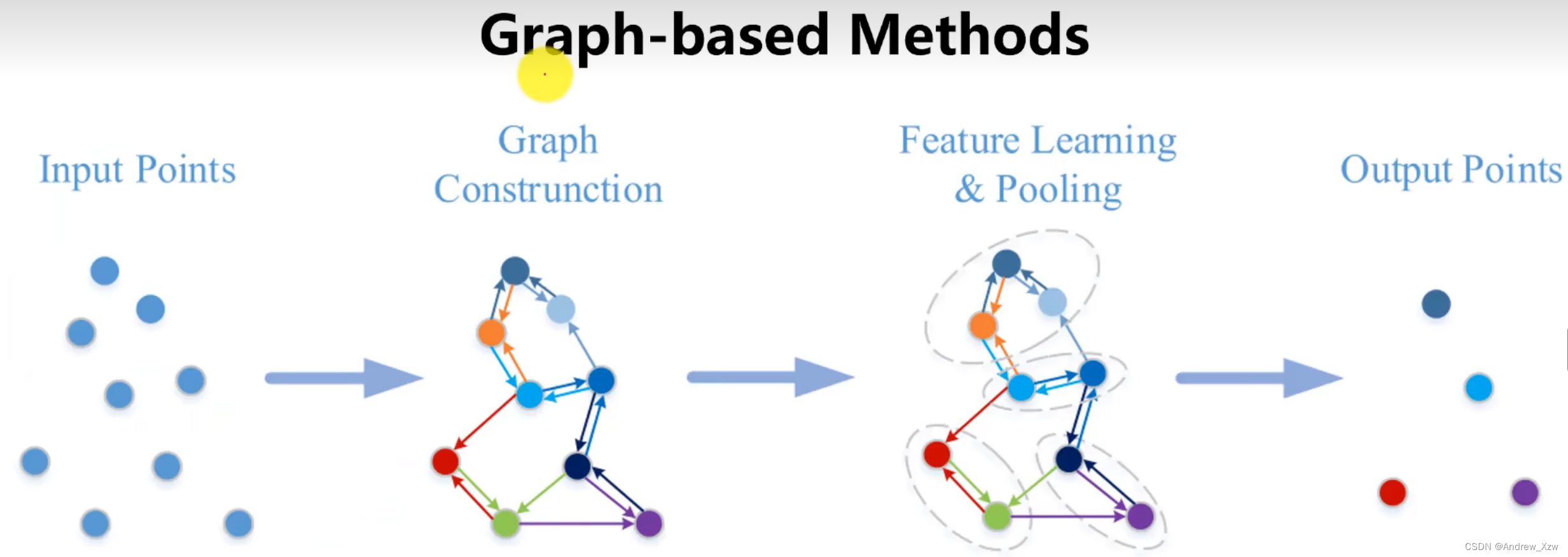
(4)基于图的方法
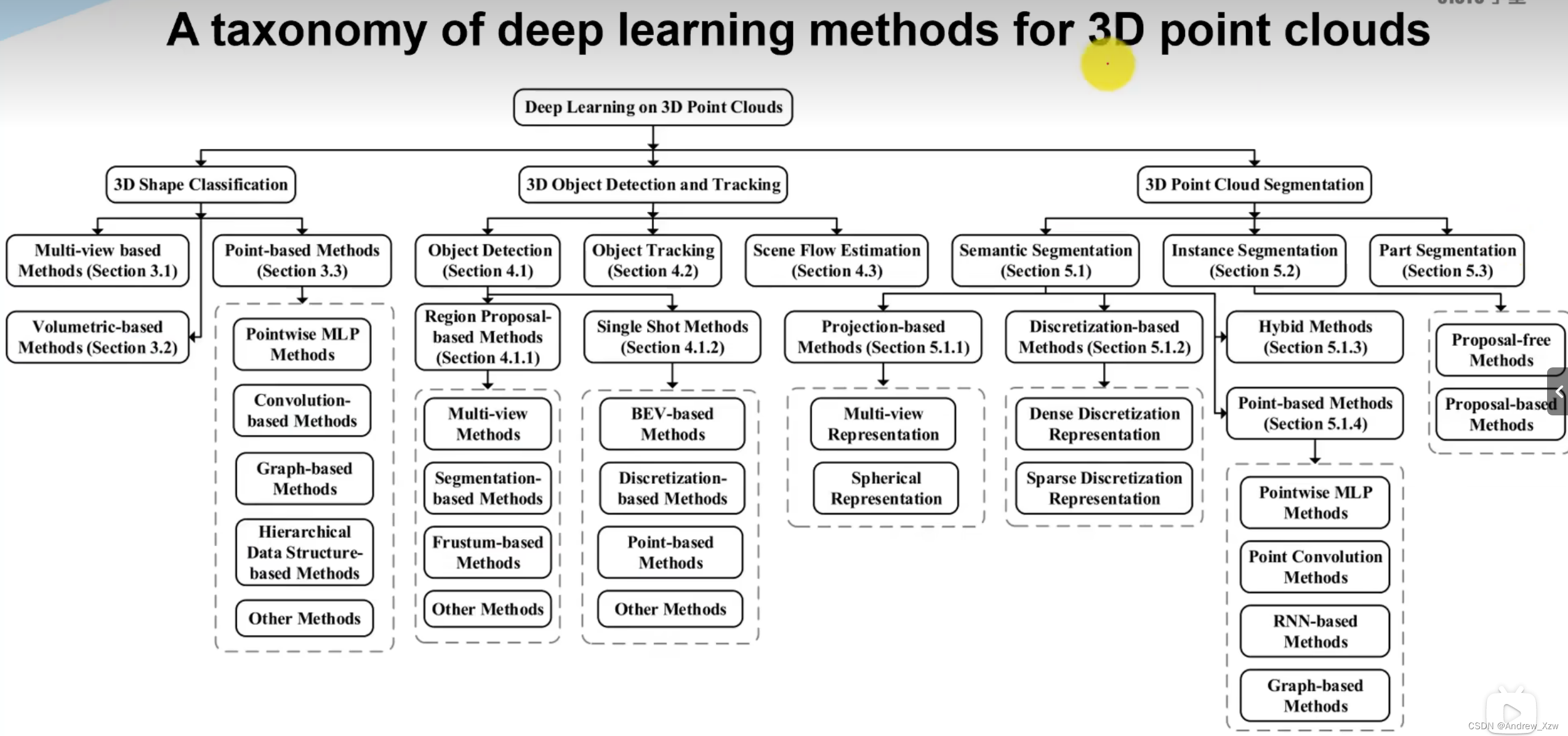
对于3D点云的一个深度学习方法的分类:
以前的一些相关工作:
PointNet原理
挑战:
(1)输入的点云是无序的点的集合;
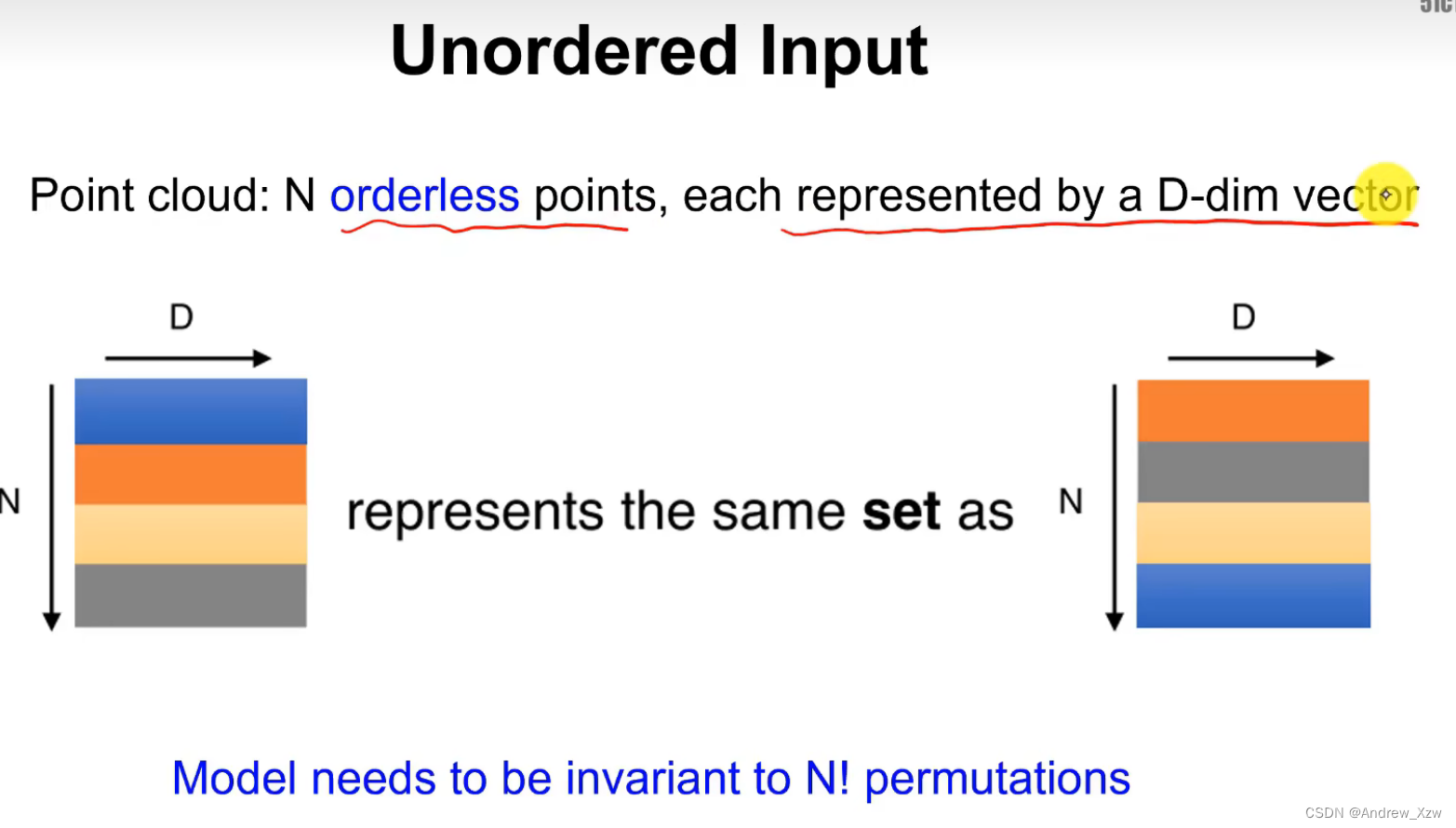
这里有一个点云数据:N个无序的点,每个点表示为D维向量。最简单的就是x,y,z三维坐标,法向量,颜色,强度信息(总之可以表达为一个矢量)
这个点的顺序的集合表示,在改变顺序后,应该还是表示同样的集合。
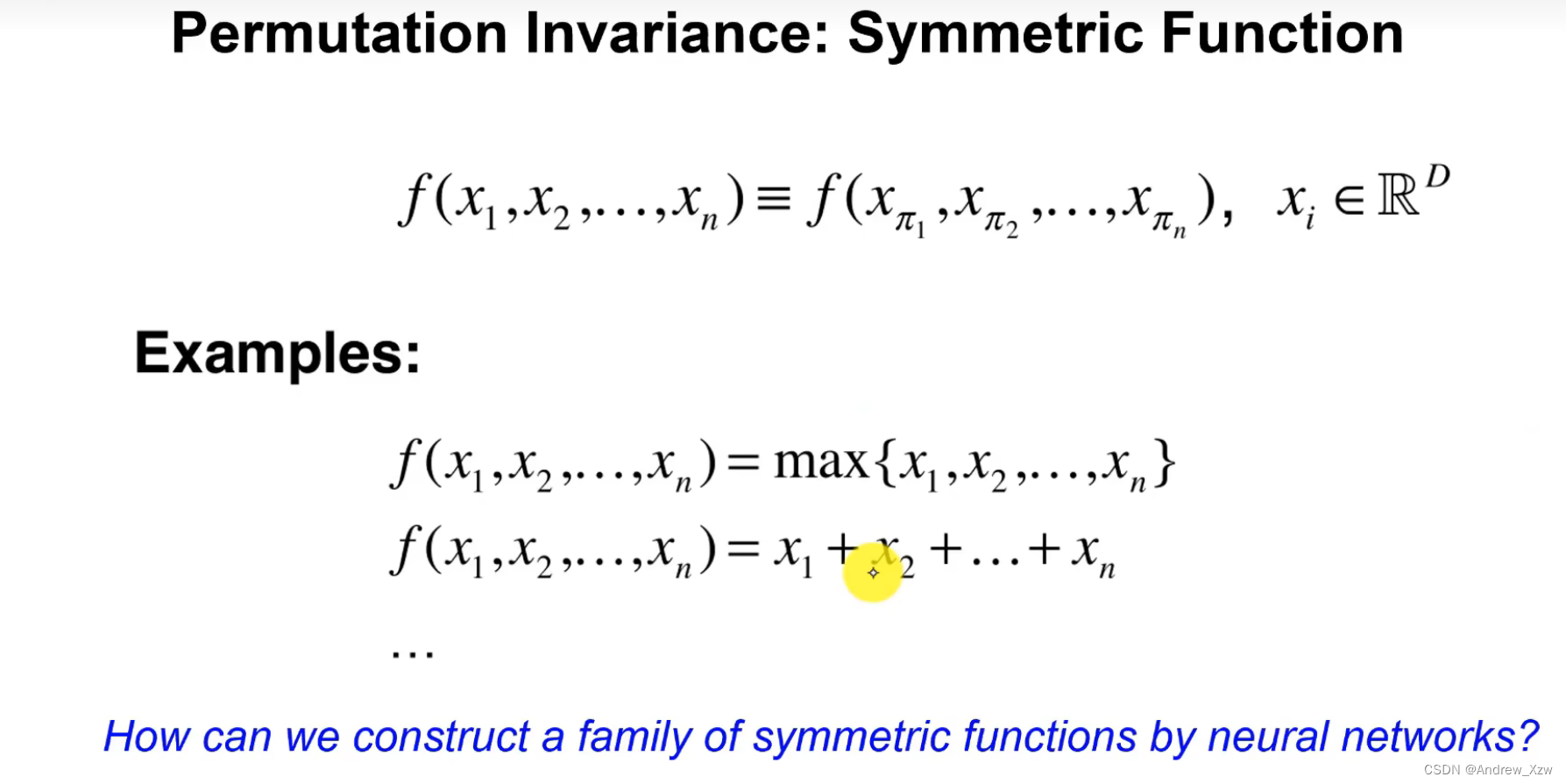
也就是说对于这种置换、排列应该有同样的结果,难么,什么样的处理能够做到这种置换不变性呢?
对称函数是可以做到这一点的,(就是改变函数中x1到xn的排列顺序后,输出不受影响)
求最大值函数是不是和排列顺序无关呢?求和函数也是啊。那么我们就可以通过神经网络构造这样的对称函数了。
构造复合函数:每个点都经过h这个函数(共享函数)(可以用MLP)进行升维变换,然后经过一个g函数(对称函数)(可以用最大池化maxpooling),比如求最大值,在经过伽马函数,得到特征。这个特征就可以用来分割、分类等。
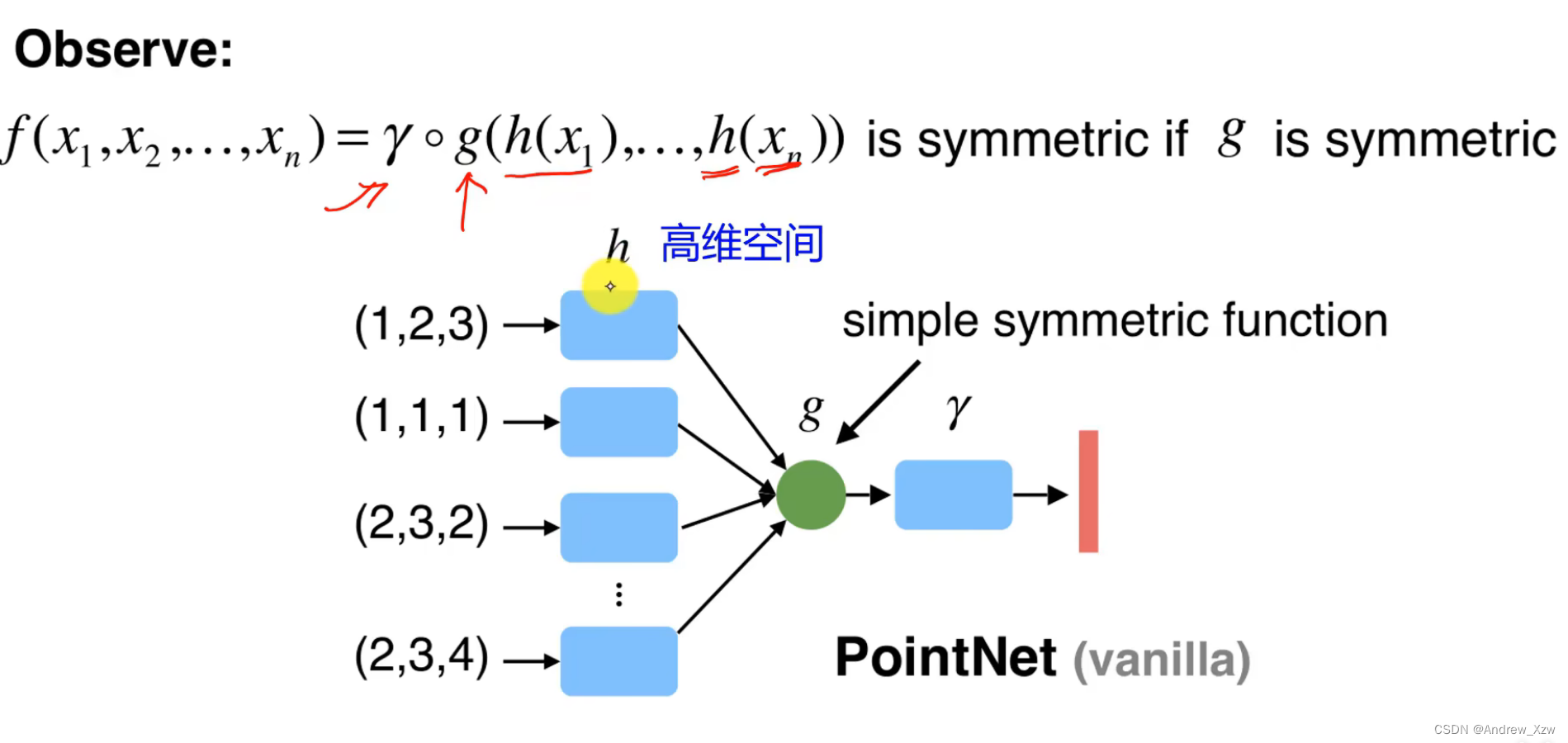
这里只要g函数是对称的,整个复合函数都是对称的。
但是这里的maxpooling是求每个维度山的最大值,会丢失一些数据点的信息;所以可以使用MLP进行升维变换(每个点单独做MLP,但是MLP的参数是共享的),高维空间里基本信息就会被保留下来。再经过maxpooling,就会得到全局特征(基本上会反映出原来点云数据的基本特征征)。
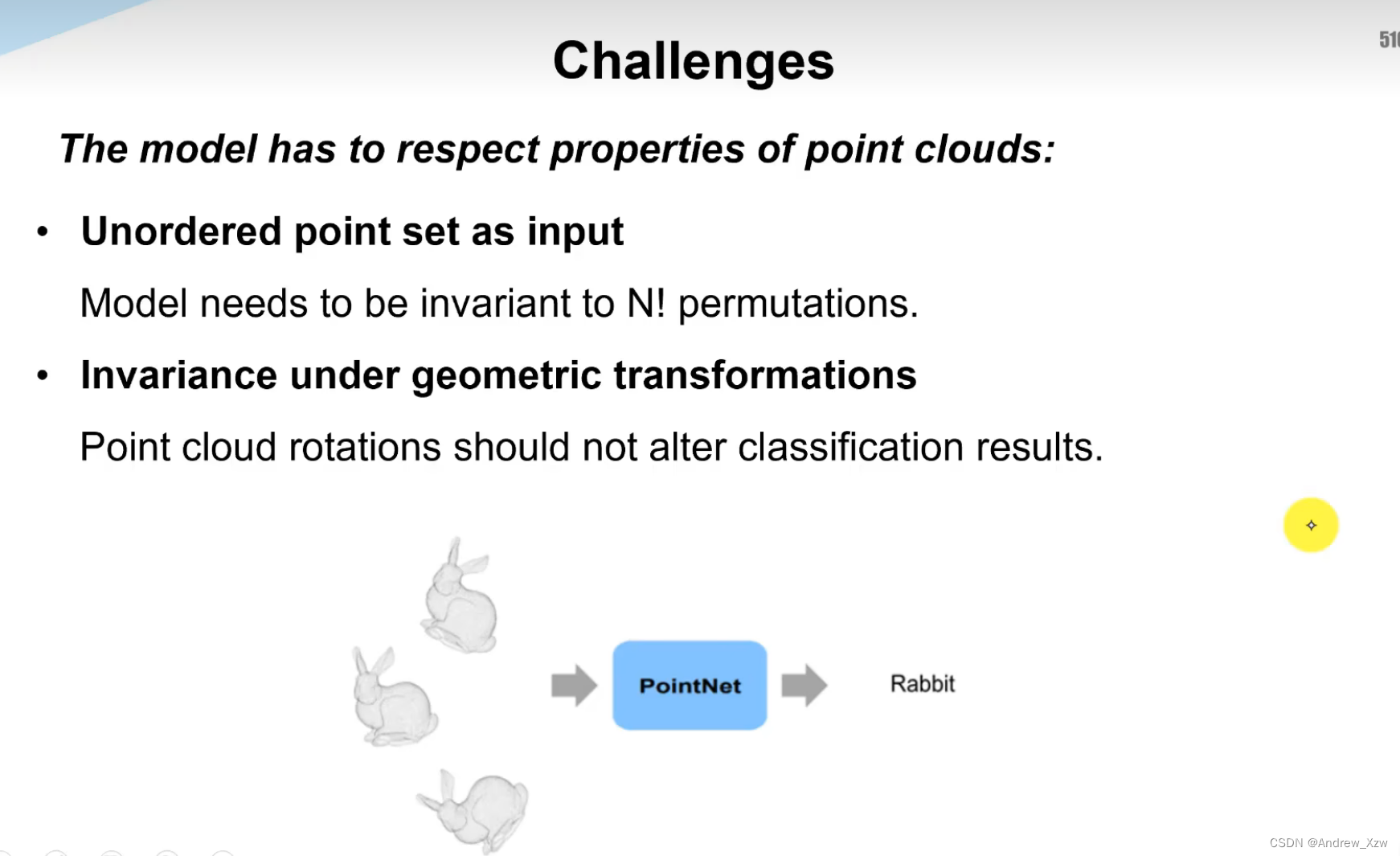
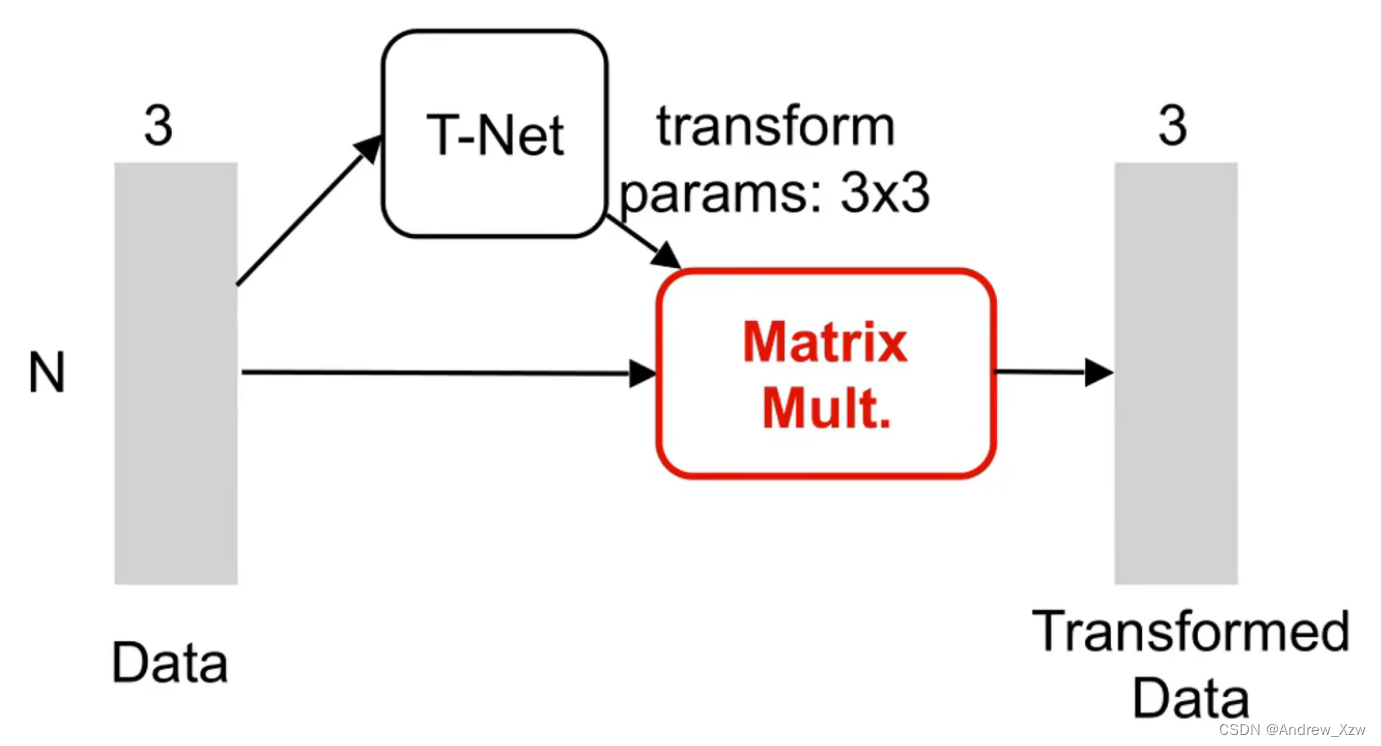
(2)对于几何变换应该有不变的特性;比如下图中的兔子有不同的视角,但是经过PoinNet后都应该分类为一个兔子。就是说这种几何变换对分类应该不会产生影响。
对于这个点,做的各种变换,最终的结果都不应有不同。设计一个变换的网络来对输入进行对准,(其实就是把点云旋转到一个角度,来更好的进行分类等。)比如,飞机旋转到一个更合适的角度,你会看的更清楚,让物体的特征更加鲜明表示出来。
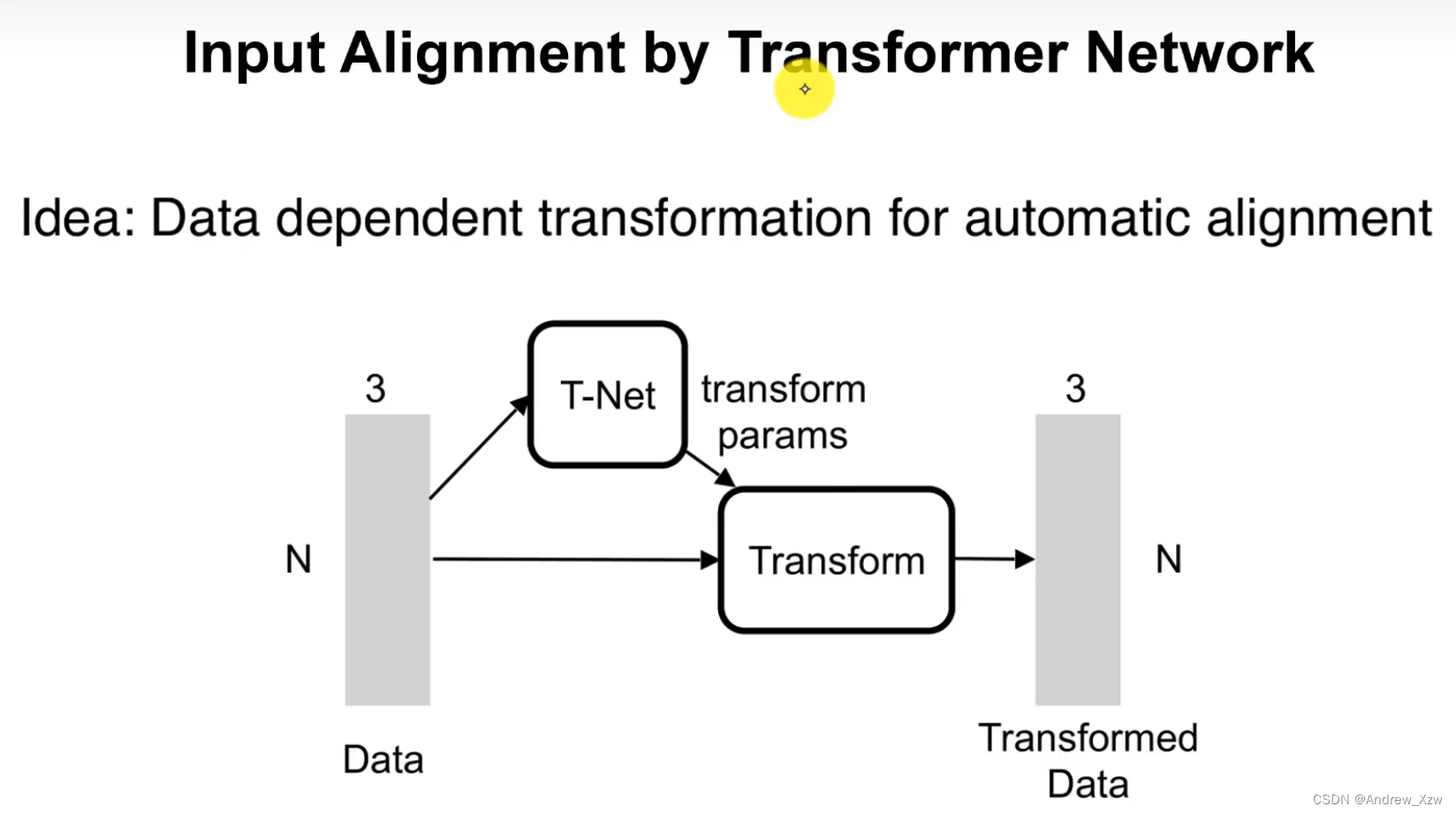
其实对输入的对准是通过矩阵乘法来实现的:
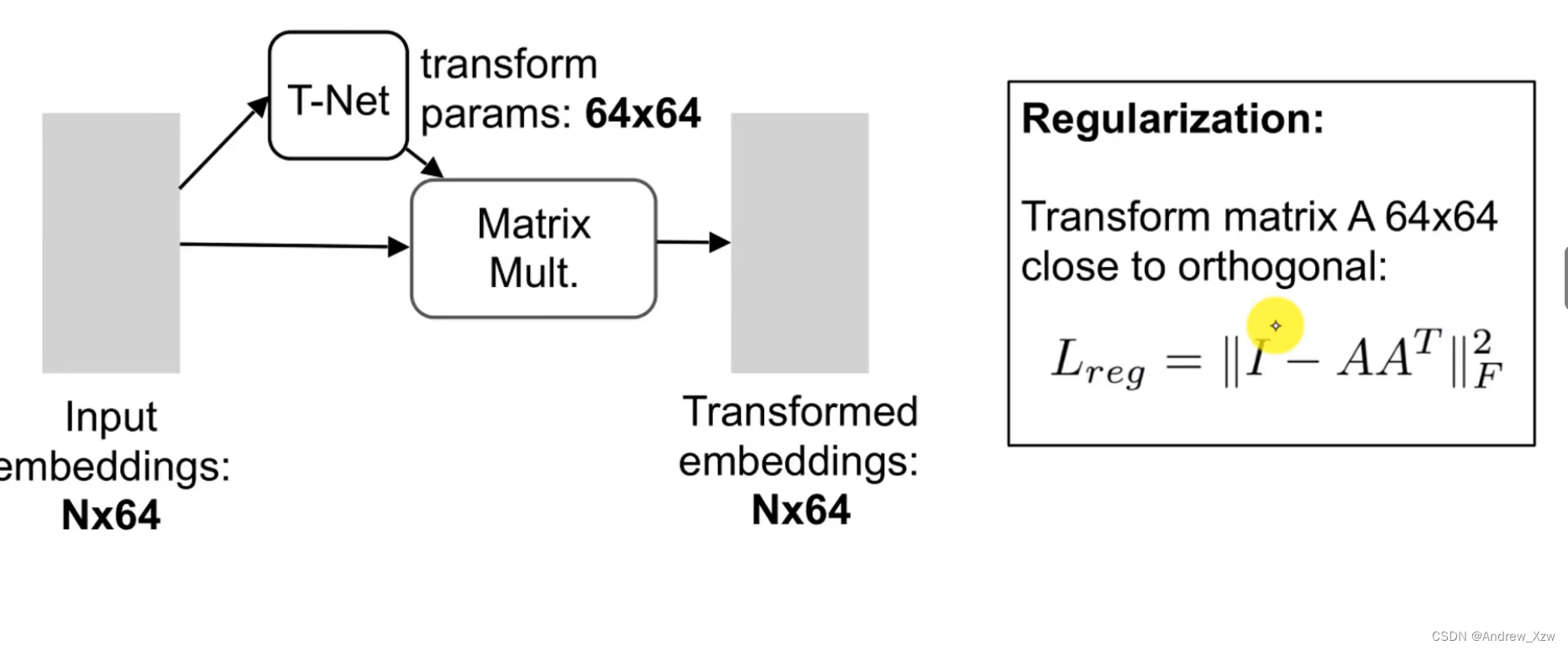
那么对于MLP升维得到的特征,也可以做一个对特征空间的对准
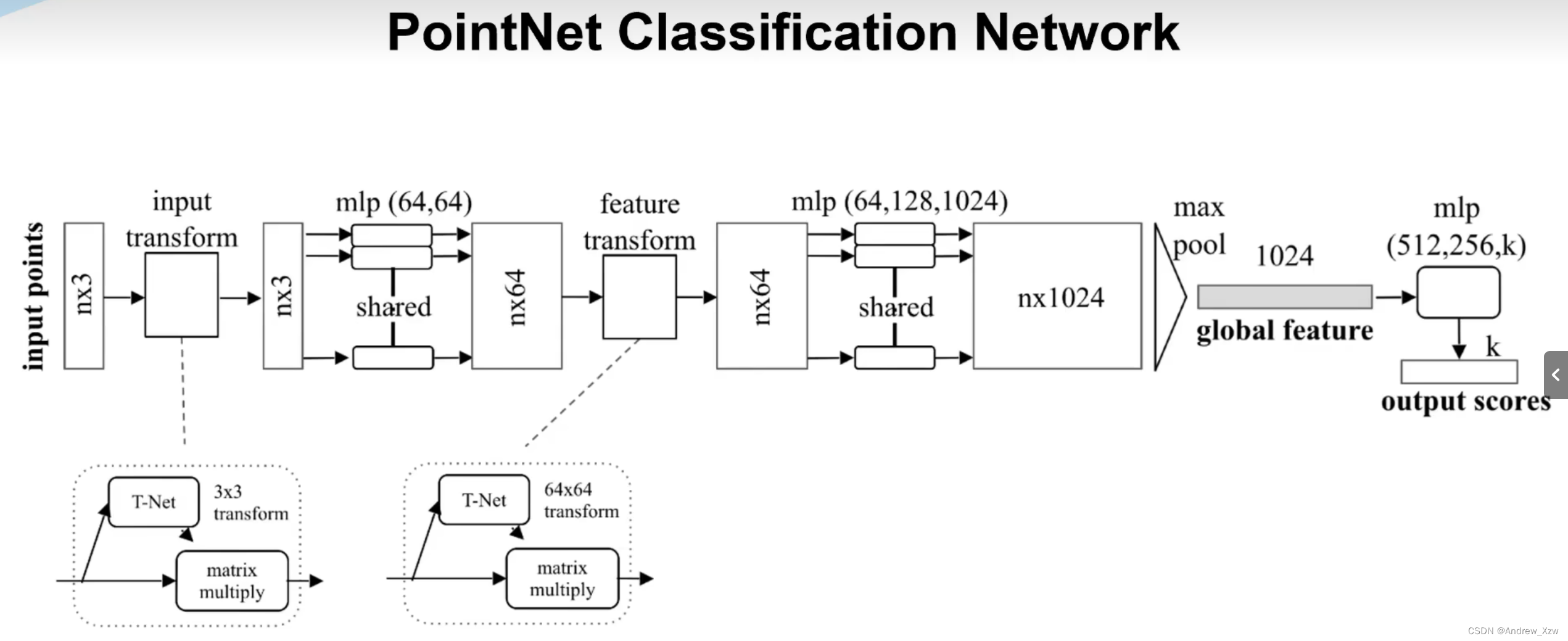
PointNet分类网络的结构:
最终输出的K,就是对于分类中的每个类别的得分值。
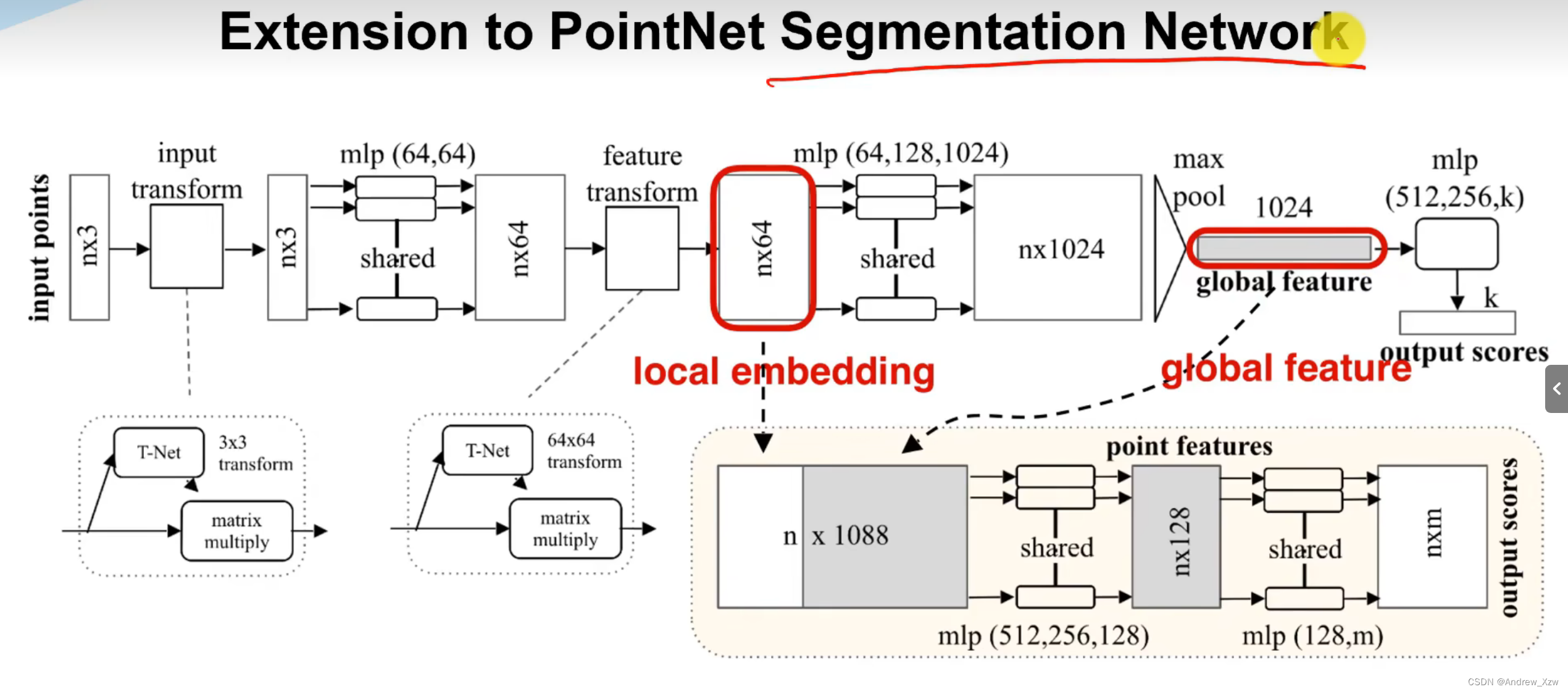
而对于分割网络,有一些变化:
分割需要对每一个点都要做分类,当我们最后得到一个全局特征后(这个其实已经丢失了每个点的基本信息了),我们对每个点进行分类的话,需要每个点的特征,所以这里进行了一个拼接操作,
最终网络的输出是nXm,还是n个点,m表示每个类别的得分情况。
PointNet++原理
是借鉴了多层神经网络的思想,可以进行层次化的多级别学习。
就和CNN类似,不同感受野下的特征学习,然后进行拼接,得到多尺度特征。
PointNet要么就是MLP对所有点学习,要么就是maxpooling对一个点,就丢失了每个点的局部上下文信息(也就是每个点和周围的点的关系)
思想:对局部区域应用PointNet(多次迭代式):
多级别学习,保持旋转不变性、置换不变性。
(1)多级别学习
多个点组成了字母“A”形状,选择一个点(红色点)作为“中心点”,画一个圈,圈里面的点作为一个组,接着对这个点应用给PointNet进行特征提取。就可以学到这个局部小区域的全局特征。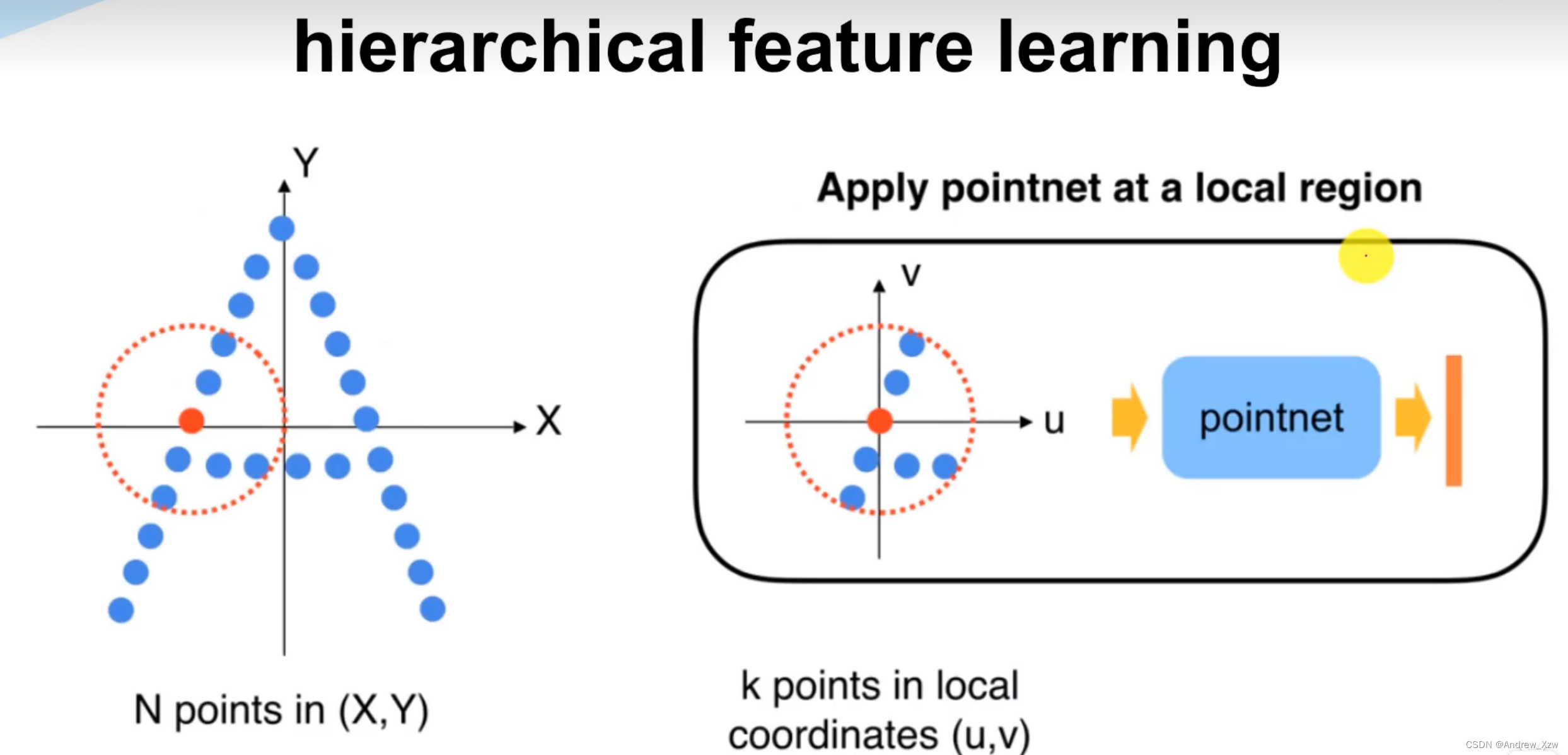
这个小区域可以是多个且可以重叠:
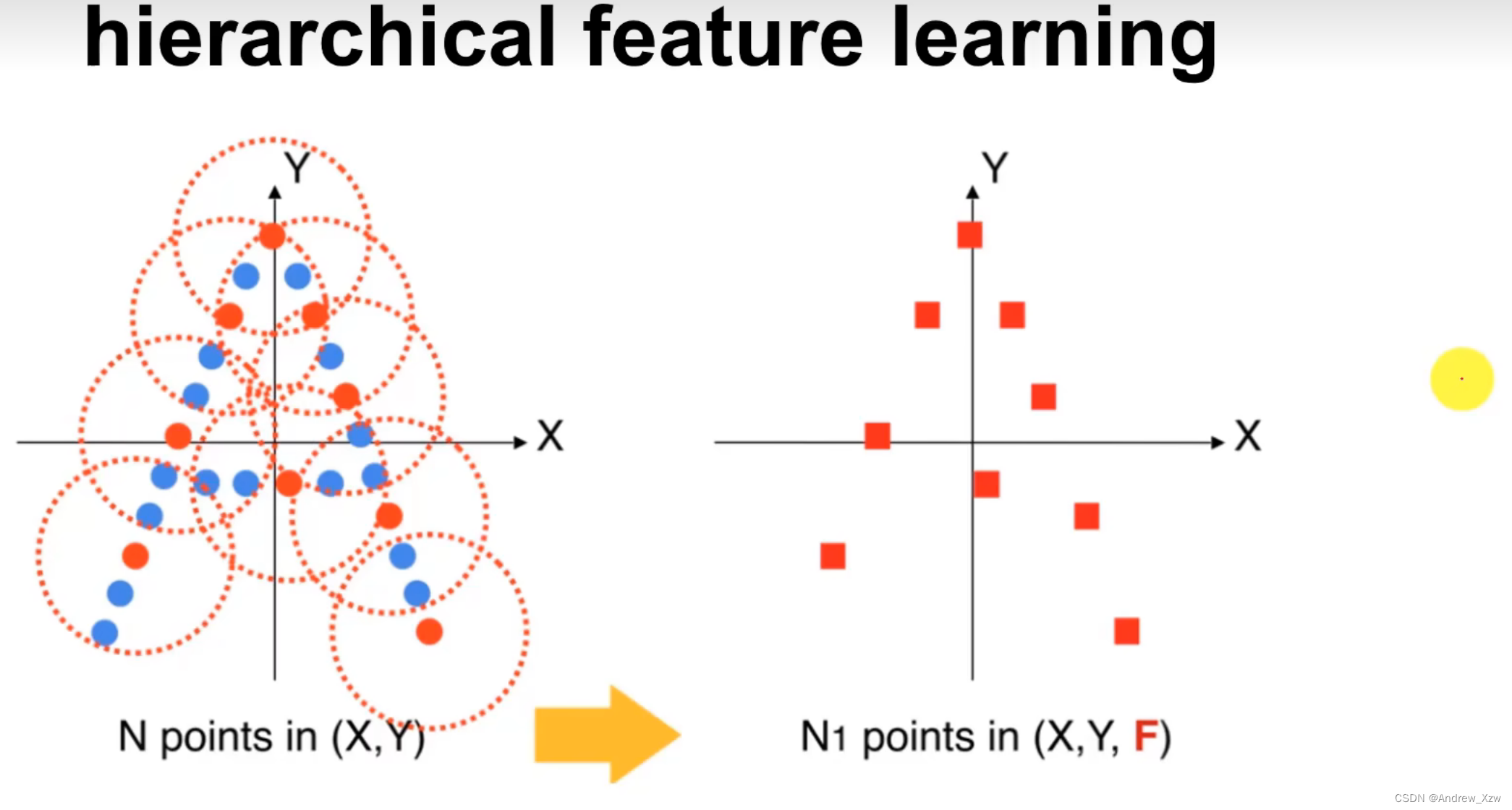
这里的确定centroid中心点就叫:Sampling采样。
确定以后,以centroid为中心选取局部的点就叫:Grouping分组。
最后对每个小分组应用PointNet进行特征学习。就得到最终小方块组成的点了。这些方块点就具有局部上下文信息特征了。
然后还可以接着小方块再次进行centroid的确定,再Grouping,再应用PointNet。就完成了多级别的特征学习了。
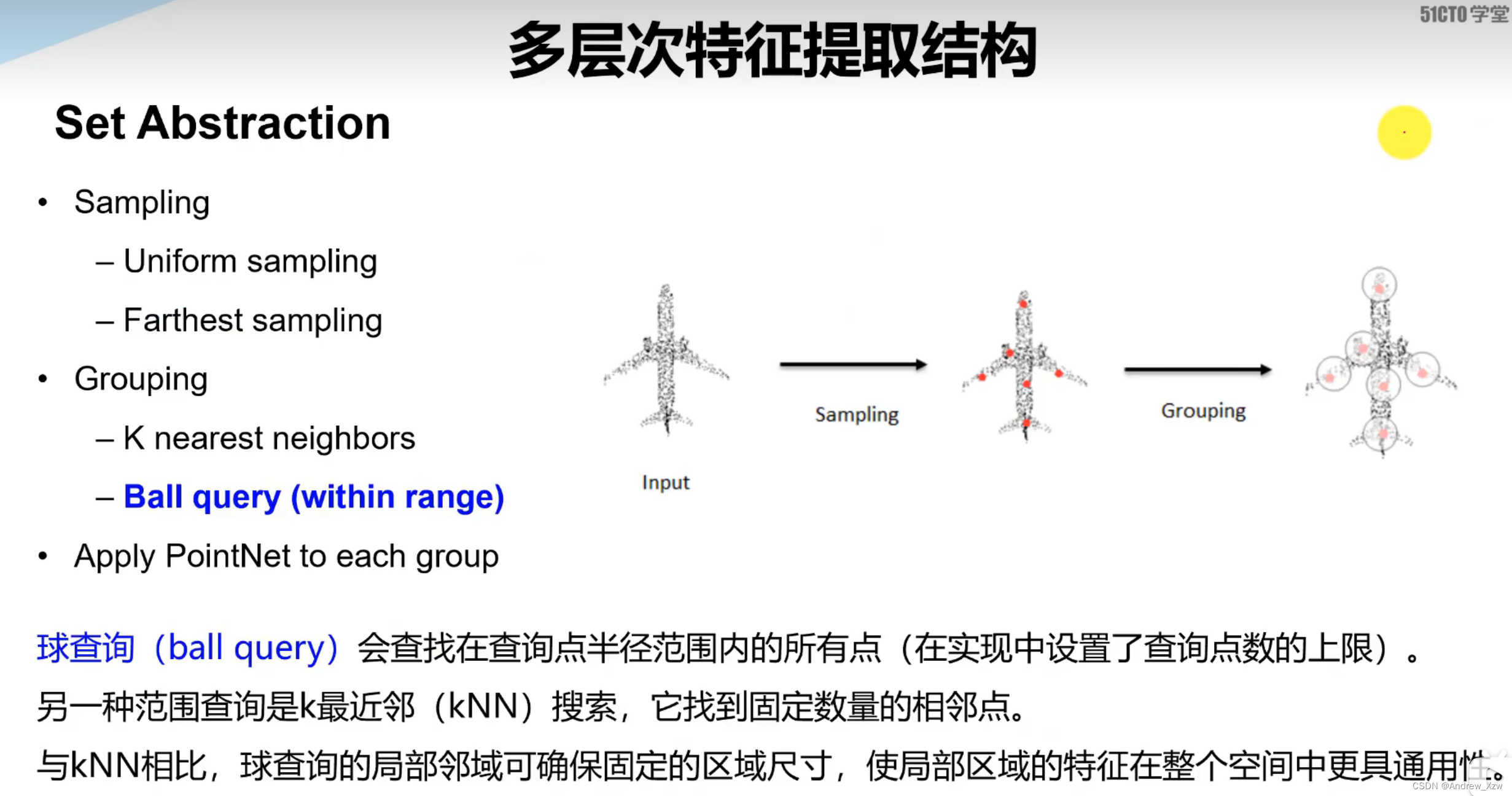
Set Abstraction = Sampling + Grouping + PointNet。

Set Abstraction:
(1)Sampling :可以均匀采样;相较于随机采样,最远点采样可以更好的覆盖采样空间。
选取距离这个点集合最远的那个点。
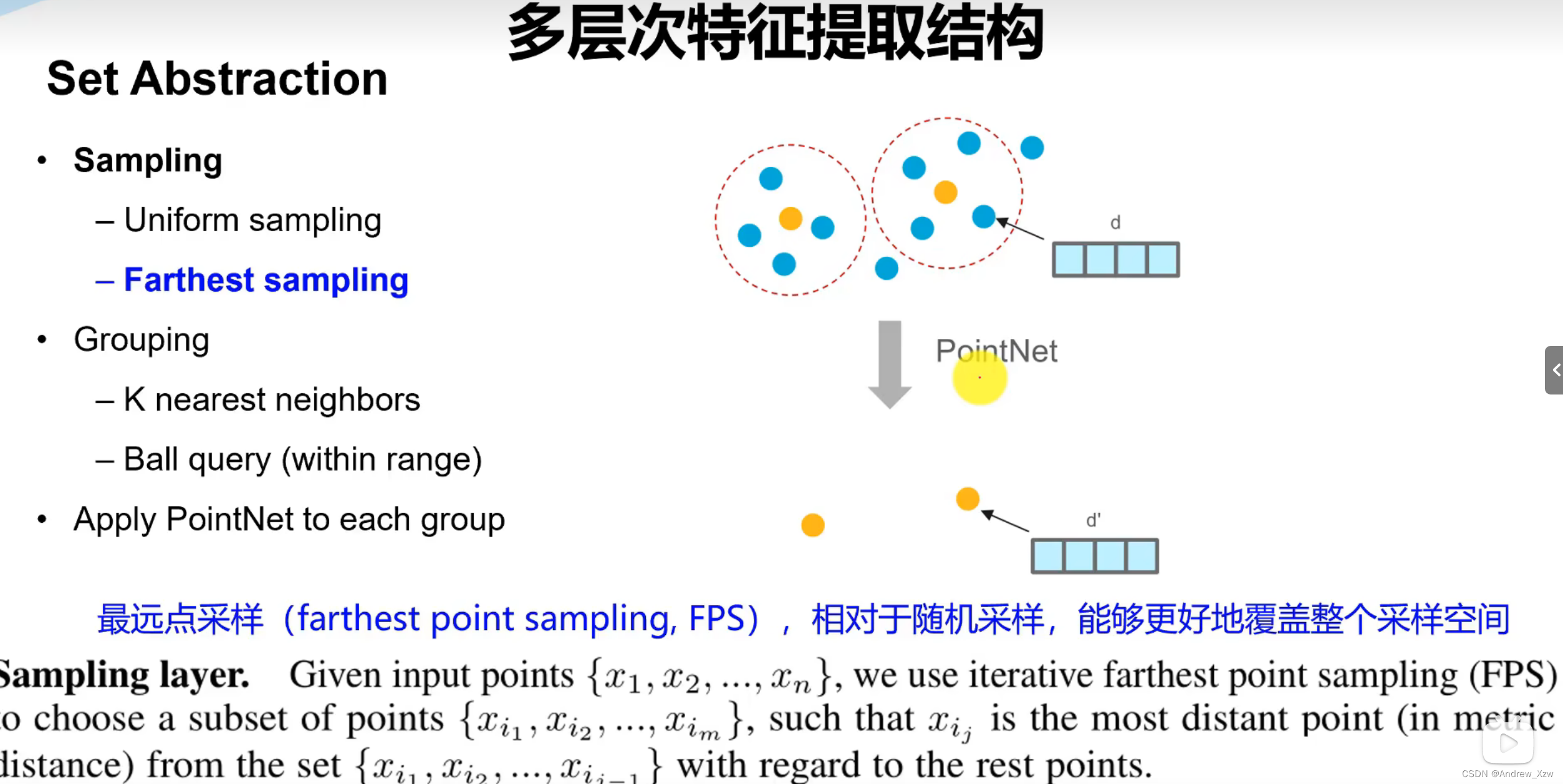
(2)Grouping :
可以利用机器学习K-means。
也可以利用球查询。以centroid为中心,按照半径(三维空间中)来找。可以保证固定区域的尺寸,让这个局部特征在整个空间中更具通用性。
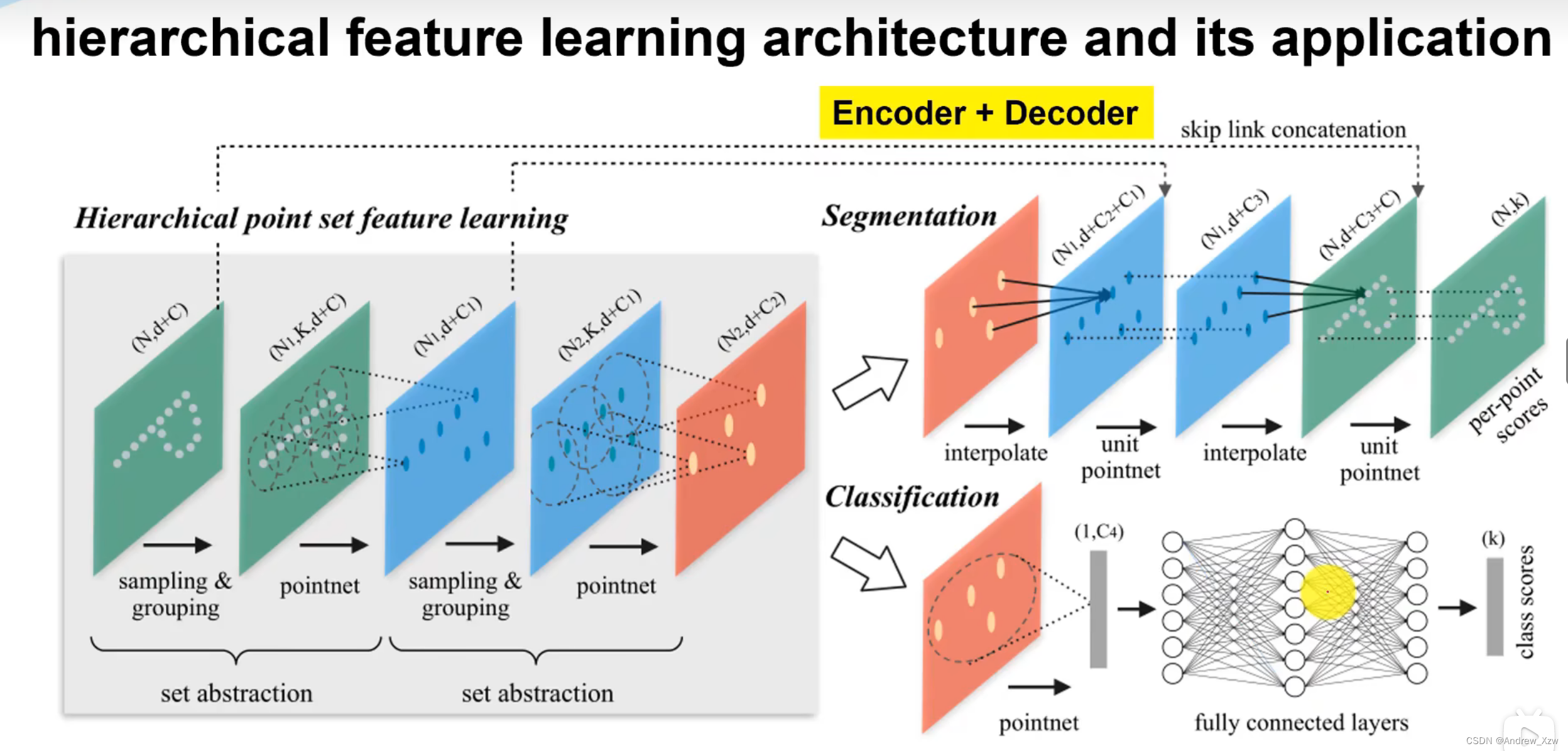
PointNet++的层次化特征学习结构:
经过两次Set Abstraction,就得到一个全局化特征了。可以用来做分类;
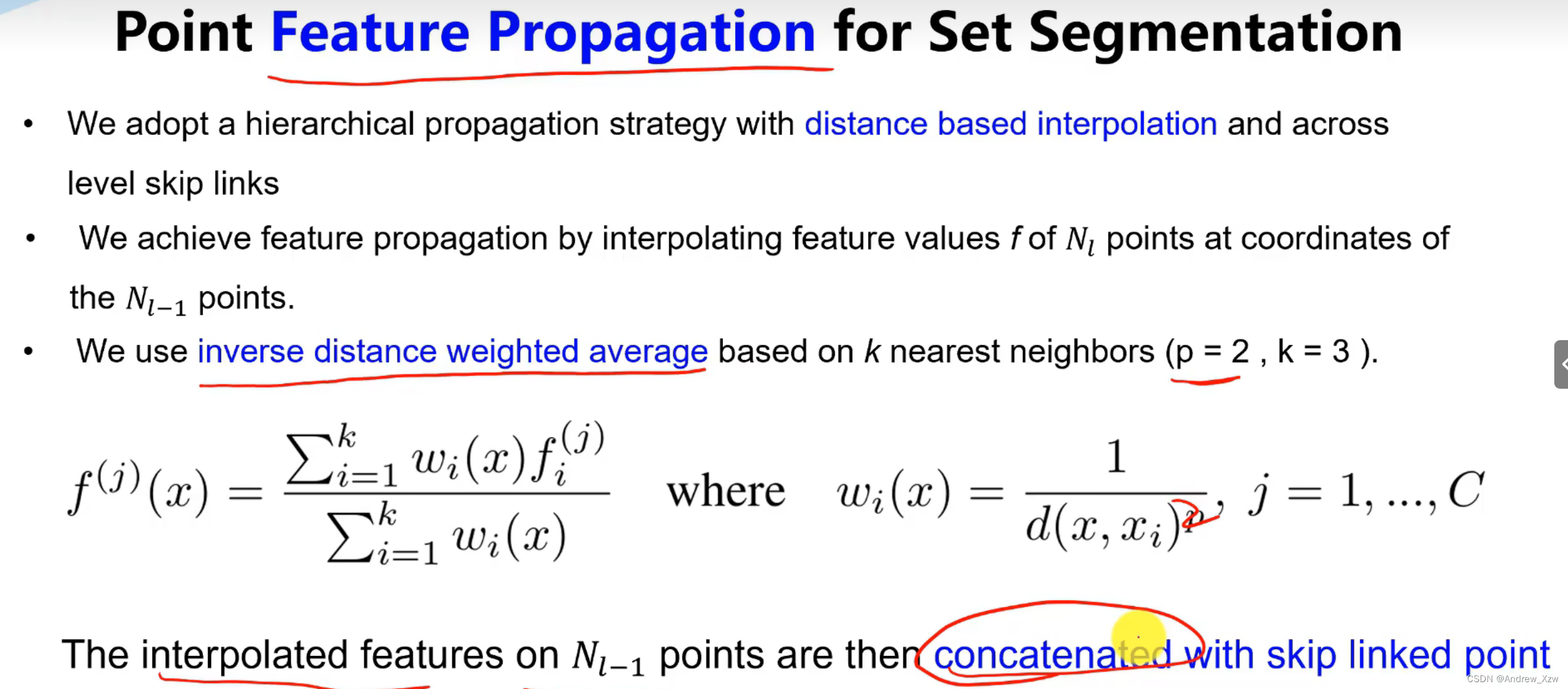
分割的话,用了一个插值,多级别学习,点是逐渐变得稀疏的,分割是需要对原始点云数据中的每个点做分类,这样的话特征是不够的,做一个插值让点数增加;类似于RGB分割的编码(下采样)与解码(上采样)操作。
插值方式,其实就是基于距离:
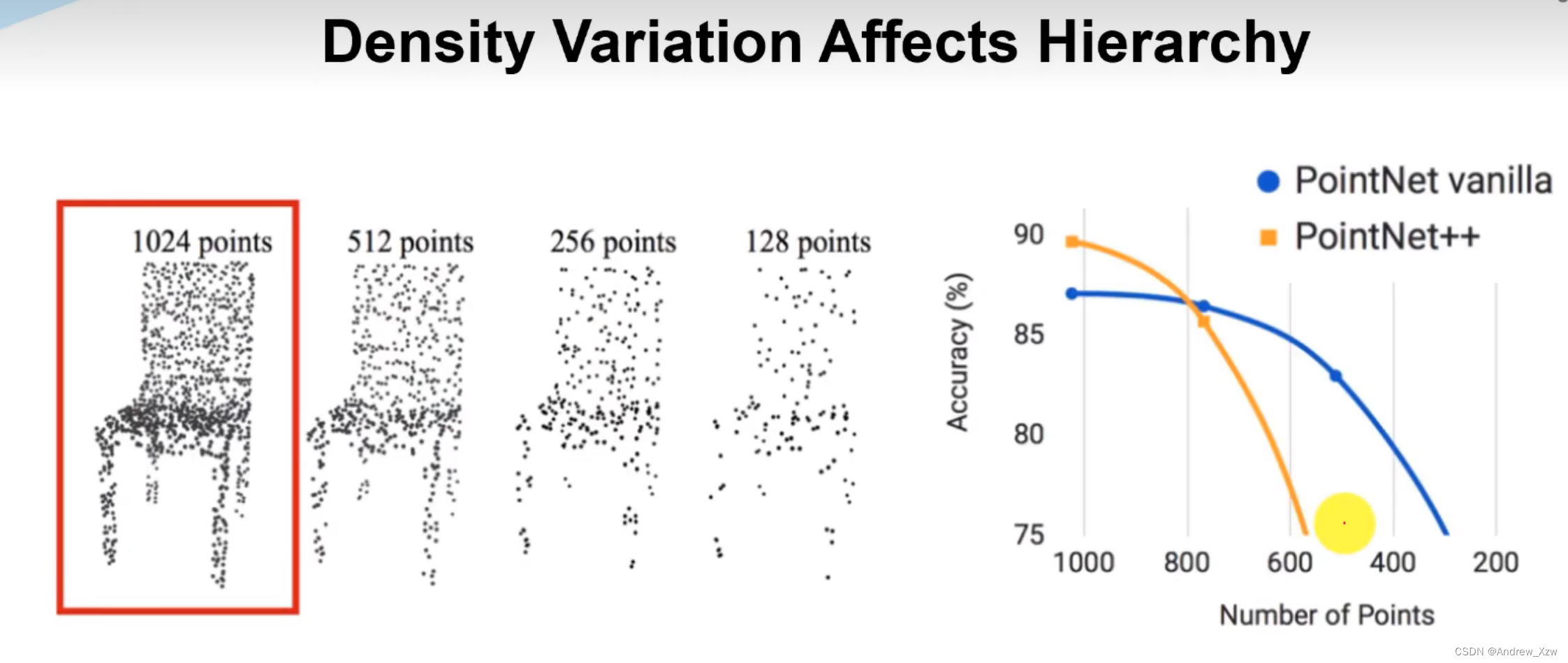
非均匀采样密度:
获取点云数据的时候,通常会出现近密远疏的现象:
会影响层次化特征学习,分组半径的选择就需要进行考量,那么对于密集点和稀疏点就不应该选取同样的半径进行分组。
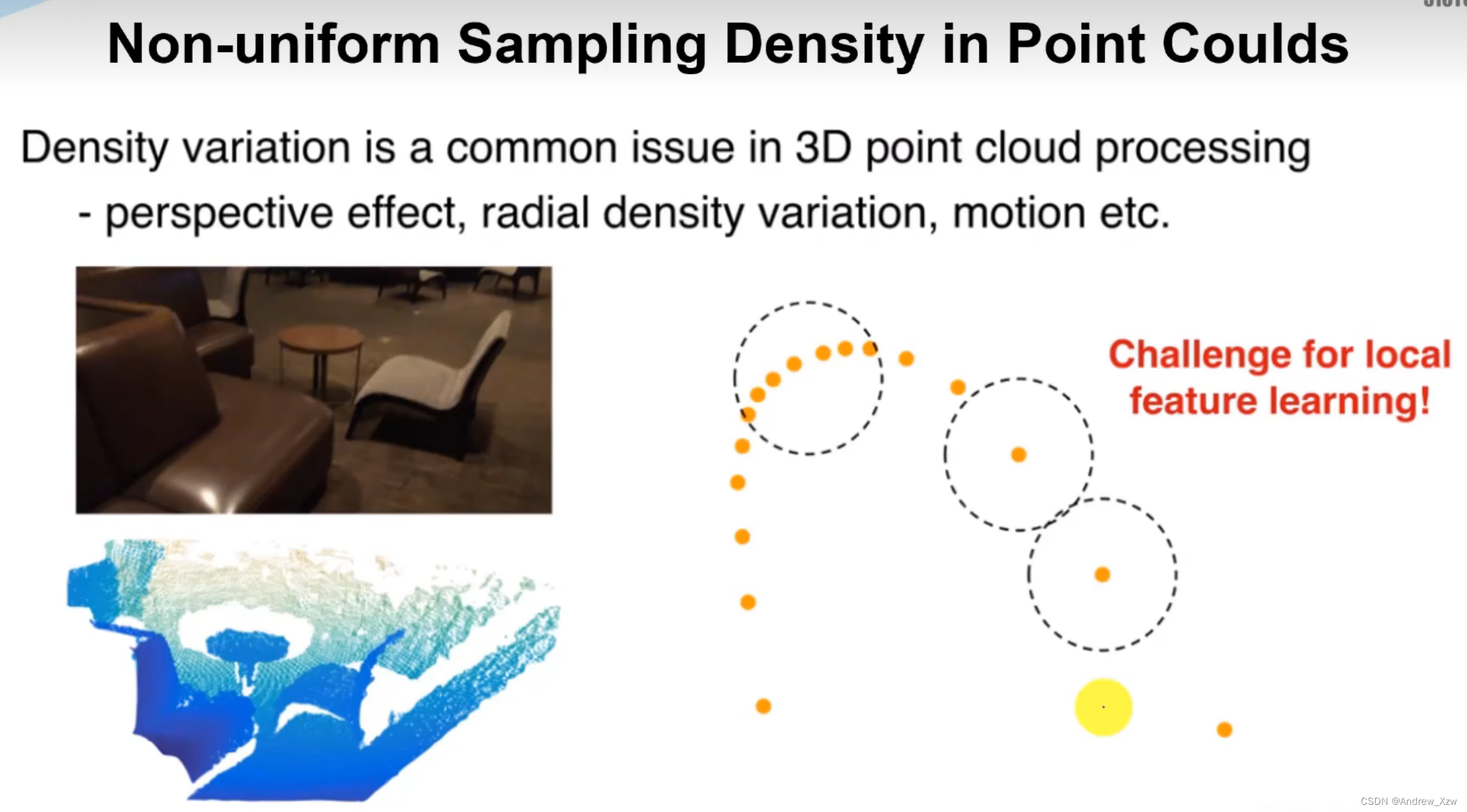
点的密集程度会对网络产生性能影响:
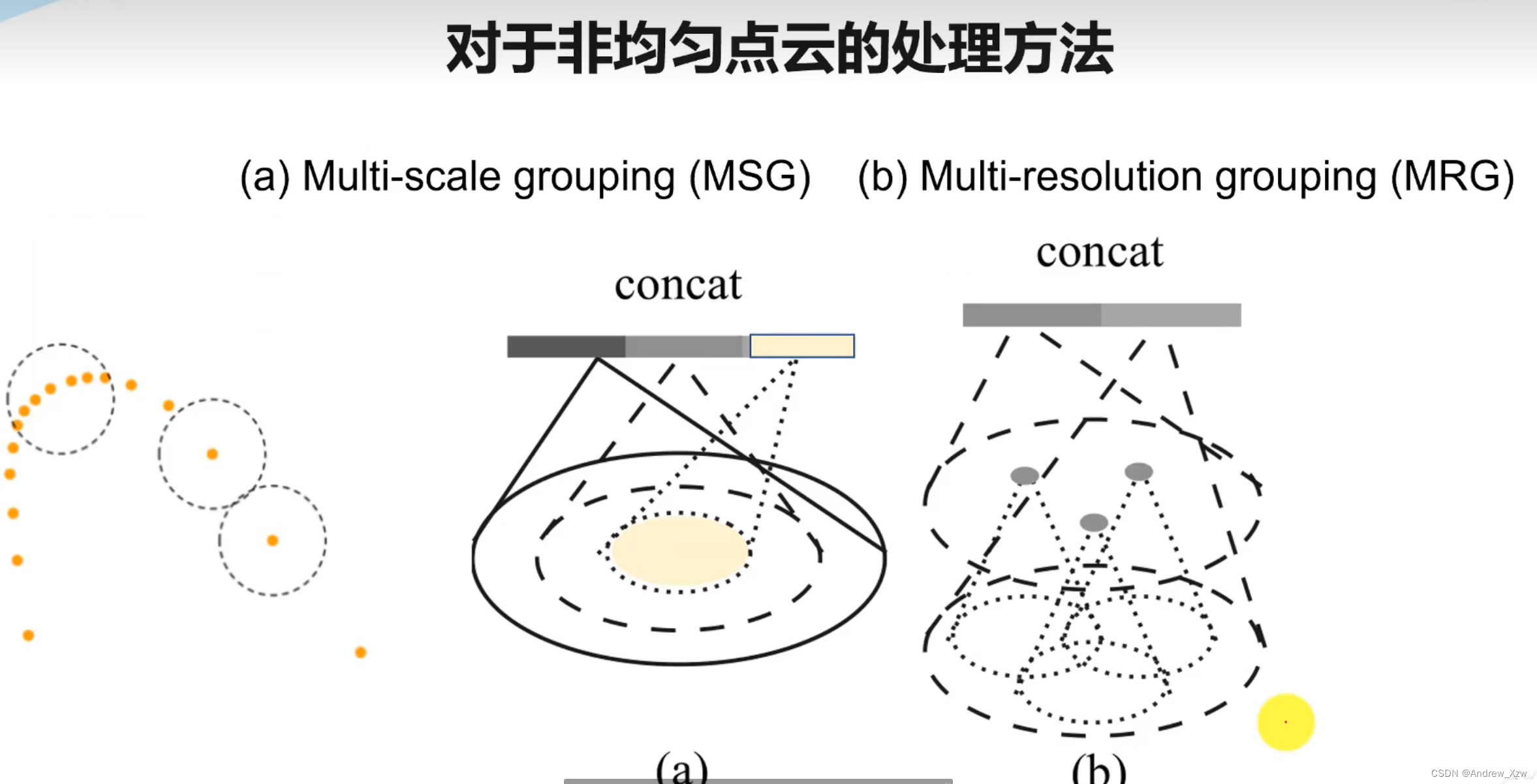
处理方法:
(1)MSG:这是对于同一级别,选取不同的半径进行分组来提取局部特征,然后拼接不同区域得到的结果;
(2)MRG:在不同级别上,将第一次的Set Abstraction的结果作为下一级别的输入。将两次Set Abstraction的结果进行拼接。
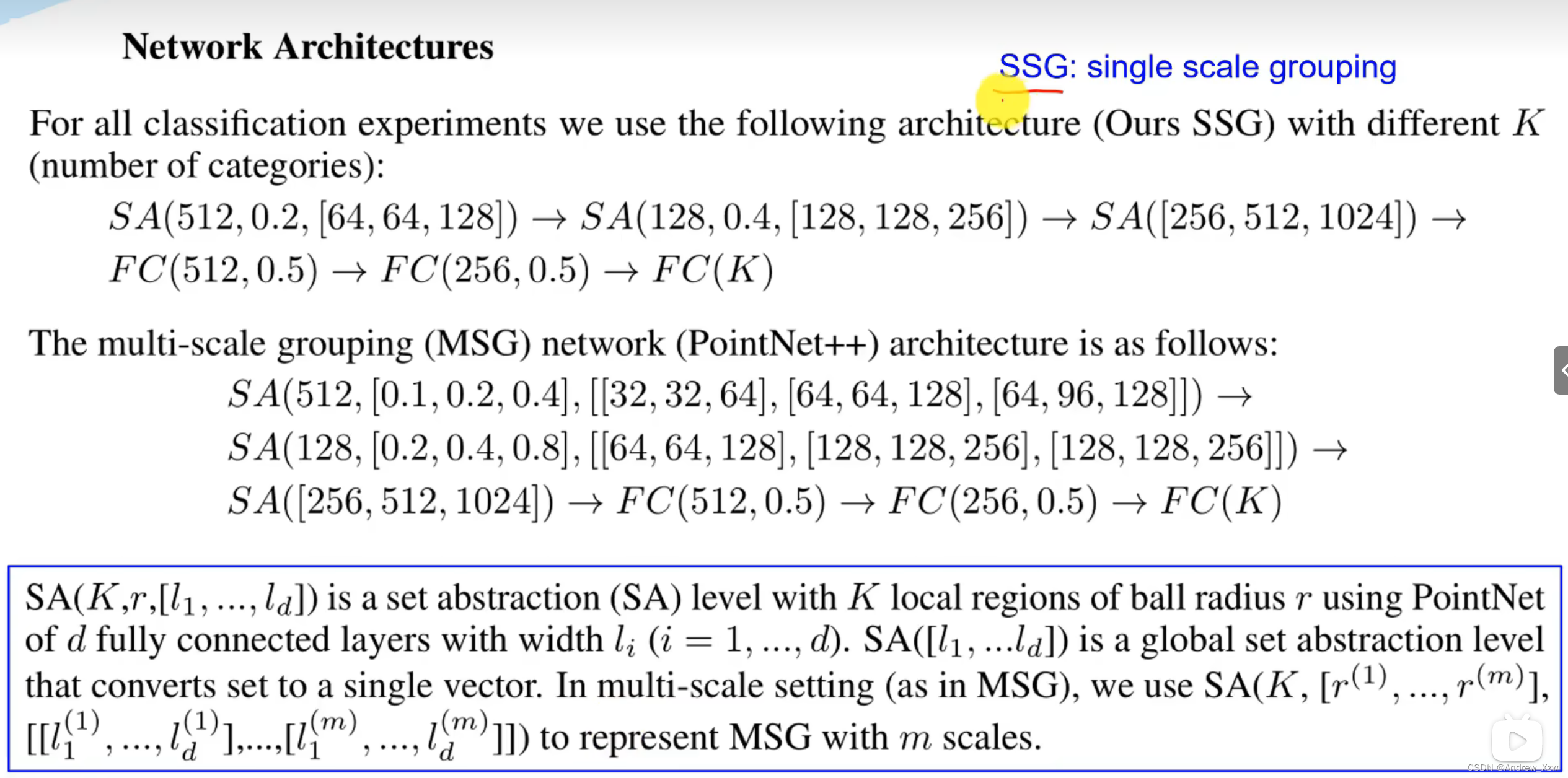
网络结构中的一些表达方式:
除了MSG,还有SSG:
用了多个SA(Set Abstraction)(但是多个SA不做拼接),每个SA有不同的半径,整个物体的尺寸都被归一化(以中心点为原点,最远点的距离是1);
而MSG:
多个SA,每个SA有多个不同的半径,比如这里的SA(512,[0.1,0.2,0.4]),有0.1,0.2,0.4不同的半径,不同半径的局部特征要做拼接。