OpenVINO Runtime支持同步或异步模式下的推理。Async API的主要优点是,当设备忙于推理时,应用程序可以并行执行其他任务(例如,填充输入或调度其他请求),而不是等待当前推理首先完成。 当我们使用异步API时,第二个请求的传输与第一个推理的执行重叠,这防止了任何硬件空闲时间。
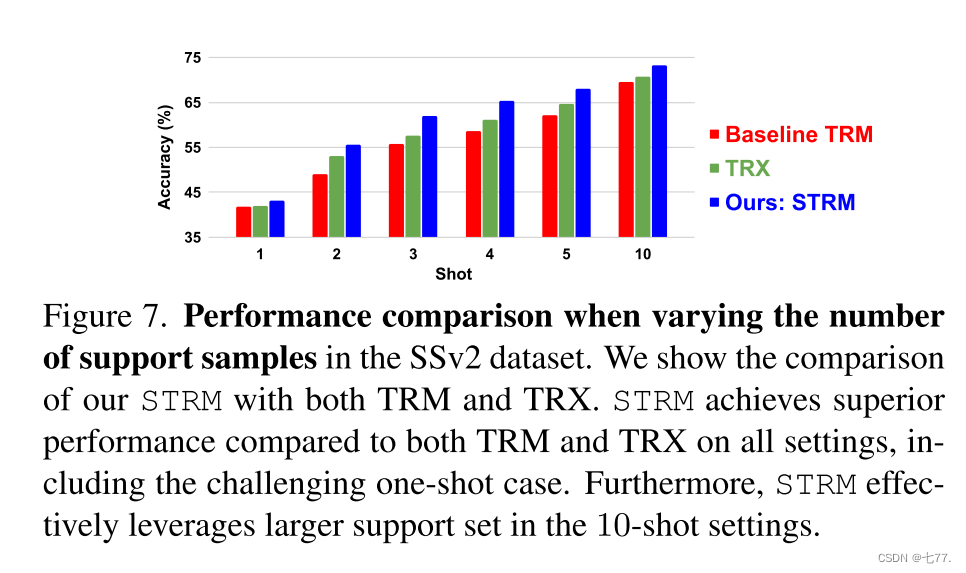
在上一篇文章中我们已经实现了使用OpenVINO™ C++ 异步API接口部署YOLOv8 实现视频快速推理,得到了大家的一致肯定。一些C#开发者也想在使用OpenVINO™在C#中实现异步推理,那么该如何实现呢?那么他来了,下面我们将会演示如何使用OpenVINO™异步接口在C#中部署YOLOv8 实现视频快速推理。首先我们看一下两种不同的推理方式其效果差异:
| 异步推理效果 | 同步推理效果 |
|---|---|
 |  |
1. OpenVINO™ C# API
英特尔发行版 OpenVINO™ 工具套件基于 oneAPI 而开发,可以加快高性能计算机视觉和深度学习视觉应用开发速度工具套件,适用于从边缘到云的各种英特尔平台上,帮助用户更快地将更准确的真实世界结果部署到生产系统中。通过简化的开发工作流程,OpenVINO™ 可赋能开发者在现实世界中部署高性能应用程序和算法。
OpenVINO™ C# API 是一个 OpenVINO™ 的 .Net wrapper,应用最新的 OpenVINO™ 库开发,通过 OpenVINO™ C API 实现 .Net 对 OpenVINO™ Runtime 调用,使用习惯与 OpenVINO™ C++ API 一致。OpenVINO™ C# API 由于是基于 OpenVINO™ 开发,所支持的平台与 OpenVINO™ 完全一致,具体信息可以参考 OpenVINO™。通过使用 OpenVINO™ C# API,可以在 .NET、.NET Framework等框架下使用 C# 语言实现深度学习模型在指定平台推理加速。
2. OpenVINO™ C# 异步接口
2.1 创建推断请求
可以从以下位置创建:InferRequest
var infer_request = compiled_model.create_infer_request();
InferRequest可以运行推理,支持同步和异步模式进行推理。
2.2 同步模式
InferRequest.infer可以使用来阻止应用程序执行,以同步模式下进行模型推理。
infer_request.infer();
2.3 异步模式
异步模式可以提高应用程序的整体帧速率,方法是使其在加速器繁忙时在主机上工作,而不是等待推理完成。要在异步模式下推断模型,需要使用InferRequest.start_async接口。
infer_request.start_async();
异步模式支持应用程序等待推理结果的两种方式:
InferRequest.wait_for:指定阻止方法的最大持续时间(以毫秒为单位)。该方法将被阻止,直到指定的时间过去,或者结果变得可用,以先到者为准。
infer_request.wait_for(long timeout);
InferRequest.wait:等到推理结果可用
infer_request.wait();
其中这两种等待推理结果的方法都是线程安全的。
3. 项目环境
- 推理设备:OpenVINO IGPU
- CPU: Intel Core i7-1165G7
- IGPU: Intel Iris Xe Graphics
- 推理模型: YOLOv8s
- 视频分辨率:1920×1080
4. 代码实现
4.1 定义YOLOv8数据处理方法
首先定义了一下YOLOv8模型前后处理的方法,包括输入数据处理接口pre_process(cv::Mat* img, int length, float* factor, std::vector<float>& data)以及预测结果处理接口std::vector<DetResult> post_process(float* result, float factor, int outputLength) ,具体不做过多讲解,代码如下所示:
public static float[] preprocess(Mat img, out float factor)
{
Mat mat = new Mat();
Cv2.CvtColor(img, mat, ColorConversionCodes.BGR2RGB);
mat = Resize.letterbox_img(mat, 640, out factor);
mat = Normalize.run(mat, true);
return Permute.run(mat);
}
public static DetResult postprocess(float[] result, float factor)
{
// Storage results list
List<Rect> positionBoxes = new List<Rect>();
List<int> classIds = new List<int>();
List<float> confidences = new List<float>();
// Preprocessing output results
for (int i = 0; i < 8400; i++)
{
for (int j = 4; j < 84; j++)
{
float source = result[8400 * j + i];
int label = j - 4;
if (source > 0.2)
{
float maxSource = source;
float cx = result[8400 * 0 + i];
float cy = result[8400 * 1 + i];
float ow = result[8400 * 2 + i];
float oh = result[8400 * 3 + i];
int x = (int)((cx - 0.5 * ow) * factor);
int y = (int)((cy - 0.5 * oh) * factor);
int width = (int)(ow * factor);
int height = (int)(oh * factor);
Rect box = new Rect(x, y, width, height);
positionBoxes.Add(box);
classIds.Add(label);
confidences.Add(maxSource);
}
}
}
DetResult re = new DetResult();
int[] indexes = new int[positionBoxes.Count];
CvDnn.NMSBoxes(positionBoxes, confidences, 0.2f, 0.5f, out indexes);
for (int i = 0; i < indexes.Length; i++)
{
int index = indexes[i];
re.add(classIds[index], confidences[index], positionBoxes[index]);
}
return re;
}
4.2 异步推理实现
与在C++一致,在C#中进行异步推理时,需要创建两个以上的推理通道InferRequest,首先读取第一帧数据并将其添加在第一个推理通道上,并开启异步推理;然后读取下一帧视频数据,并加载到另一个推理通道上;接着等待上一帧数据推理是否结束,如果结束,便会读取推理结果,进行结果处理;接着读取下一帧数据,并将推理结果加载到对应的通道上,依次往复,便可以实现视频数据的异步推理。
static void yolov8_async_det()
{
string video_path = "E:\\ModelData\\NY.mp4";
string model_path = "E:\\Model\\yolo\\yolov8s.onnx";
Core core = new Core();
Model model = core.read_model(model_path);
CompiledModel compiled_model = core.compile_model(model, "GPU");
VideoCapture capture = new VideoCapture(video_path);
if (!capture.IsOpened())
{
Console.WriteLine("ERROR: 视频无法打开");
return;
}
List<InferRequest> requests = new List<InferRequest> { compiled_model.create_infer_request(), compiled_model.create_infer_request() };
Mat frame = new Mat();
capture.Read(frame);
float factor = 0f;
float[] input_data = preprocess(frame, out factor);
requests[0].get_input_tensor().set_data(input_data);
requests[0].start_async();
Stopwatch sw = new Stopwatch();
float[] total_infs = new float[3];
while (true)
{
Mat next_frame = new Mat();
if (!capture.Read(next_frame))
{
break;
}
sw.Restart();
input_data = preprocess(frame, out factor);
requests[1].get_input_tensor().set_data(input_data);
sw.Stop();
total_infs[0] = sw.ElapsedMilliseconds;
sw.Restart();
requests[1].start_async();
requests[0].wait();
sw.Stop();
total_infs[1] = sw.ElapsedMilliseconds;
sw.Restart();
float[] output_data = requests[0].get_output_tensor().get_data<float>(8400 * 84);
DetResult result = postprocess(output_data, factor);
sw.Stop();
total_infs[2] = sw.ElapsedMilliseconds;
Cv2.PutText(frame, "PreProcess: " + (1000.0 / total_infs[0]).ToString("0.00") + "FPS " + (total_infs[0]).ToString("0.00") + "ms",
new Point(20, 40), HersheyFonts.HersheyPlain, 2, new Scalar(255, 0, 255), 2);
Cv2.PutText(frame, "Inference: " + (1000.0 / total_infs[1]).ToString("0.00") + "FPS " + (total_infs[1]).ToString("0.00") + "ms",
new Point(20, 70), HersheyFonts.HersheyPlain, 2, new Scalar(255, 0, 255), 2);
Cv2.PutText(frame, "PostProcess: " + (1000.0 / total_infs[2]).ToString("0.00") + "FPS " + (total_infs[2]).ToString("0.00") + "ms",
new Point(20, 100), HersheyFonts.HersheyPlain, 2, new Scalar(255, 0, 255), 2);
Cv2.PutText(frame, "Total: " + (1000.0 / (total_infs[0] + total_infs[1] + total_infs[2])).ToString("0.00")
+ "FPS " + ((total_infs[0] + total_infs[1] + total_infs[2])).ToString("0.00") + "ms",
new Point(20, 130), HersheyFonts.HersheyPlain, 2, new Scalar(255, 0, 255), 2);
Mat res_mat = Visualize.draw_det_result(result, frame);
Cv2.ImShow("Result", res_mat);
Cv2.WaitKey(10);
swap(requests);
frame = next_frame;
}
}
上面已经展示了该项目实现的全部代码,如果想获取项目文件,通过下面链接进行下载:
ttps://download.csdn.net/download/Grape_yan/89460175
5. 时间测试
写完代码后,对同步接口以及异步推理接口进行了时间测试,如下表所示:
| API | PrePocess | Inference | PostProcess | Total | FPS |
|---|---|---|---|---|---|
| Sync | 11.97 ms | 34.68 ms | 1.58 ms | 48.23 ms | 20.73 |
| Async | 14.26 ms | 0.01 ms | 1.22 ms | 15.49 ms | 64.56 |
其中同步推理一帧平均推理时间为48.23毫秒,而异步接口一帧平均推理时间仅为15.49毫秒,异步接口一秒钟平均可以实现64.56FPS的推理,是同步推理的3.11倍,速度快到飞起!!之前我们已经测试过C++异步推理时间,如下表所示:
| API | PrePocess | Inference | PostProcess | Total | FPS |
|---|---|---|---|---|---|
| Sync | 9.83 ms | 33.18 ms | 0.1 ms | 43.02 ms | 23.25 |
| Async | 11.27 ms | 0.02 ms | 0.08 ms | 11.37 ms | 87.98 |
6. 总结
在该项目中,我们实现了在C#中使用OpenVINO异步模式下的推理,并和同步推理进行了对比,异步推理速度提升了3.78倍,并且在没有进行任何优化掉前提下,使用集成显卡中便实现了视频的快速推理。
最后如果各位开发者在使用中有任何问题,欢迎大家与我联系。





![[17] 使用Opencv_CUDA 进行滤波操作](https://img-blog.csdnimg.cn/direct/0b3071cbfb7048d6b71b4b57964702fb.png)