文章目录
- 概述
- 效果如何?
- take home message
- lateral noise 模型
- axial noise 模型
- 实验
- 实验设定
- lateral noise与axial noise的定义
- axial noise与lateral noise的提取
- 噪声分布的结果和建模
- 最终拟合得到的lateral noise模型
- 最终拟合得到的axial noise模型
- 应用噪声模型至KinectFusion
- 数据滤波
- 位姿估计: 加权ICP
- Volumetric depth map fusion
- 重建与tracking结果
- 代码分析
- 初始化
- 结论
概述
对相机进行噪声模型分析,主要目的是为了更好地处理kincet深度图。
此外,噪声模型也可以更好地应用给kinectfusion系统pipeline中的滤波、体积融合以及位姿估计等动作。
实验结果表示,这样做的好处是可以重建更为精细的细节以及thinner surface。
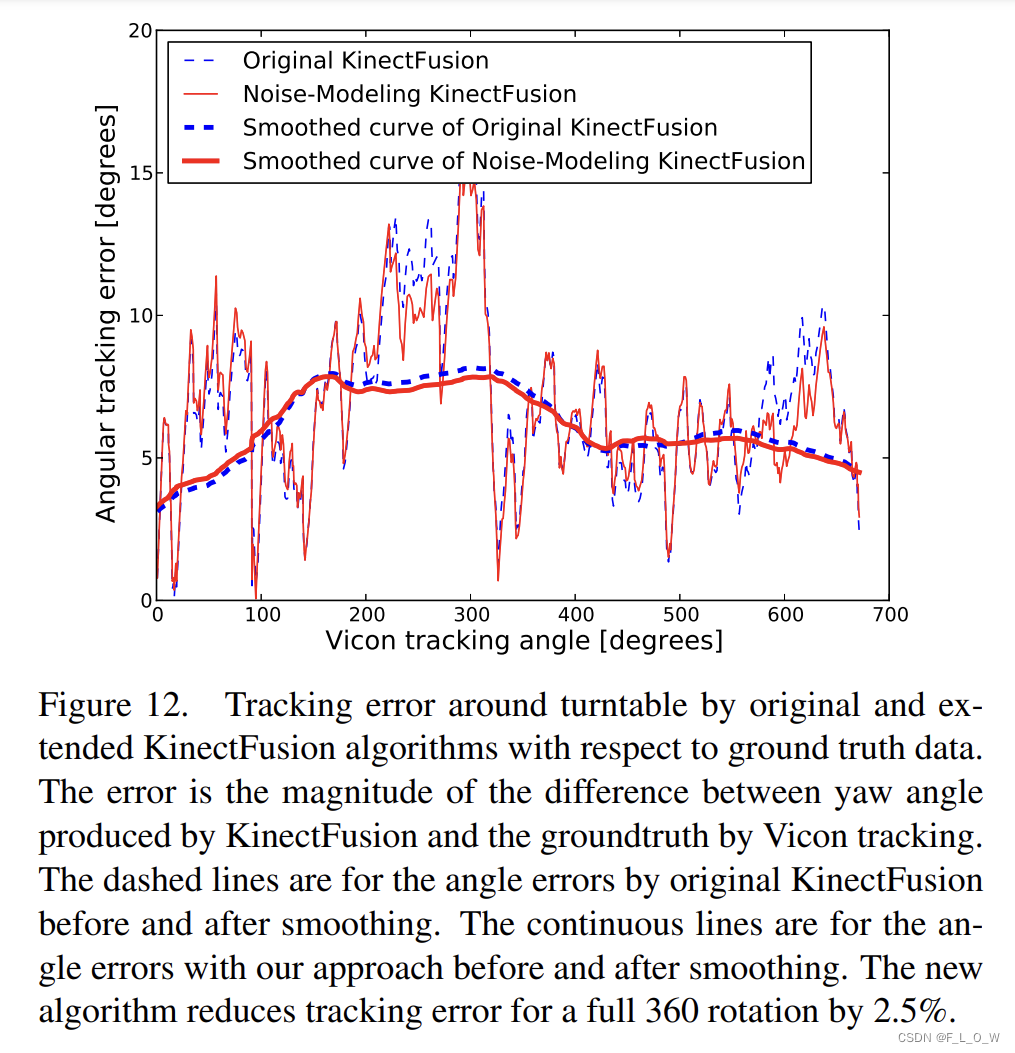
定量结果进一步地表明,噪声模型的引入,亦可以提高姿态估计的精度。
开源代码实现:https://github.com/intelligent-control-lab/Kinect_Smoothing/tree/master/kinect_smoothing (仅仅是给深度图去噪的部分有)
论文链接: http://users.cecs.anu.edu.au/~nguyen/papers/conferences/Nguyen2012-ModelingKinectSensorNoise.pdf
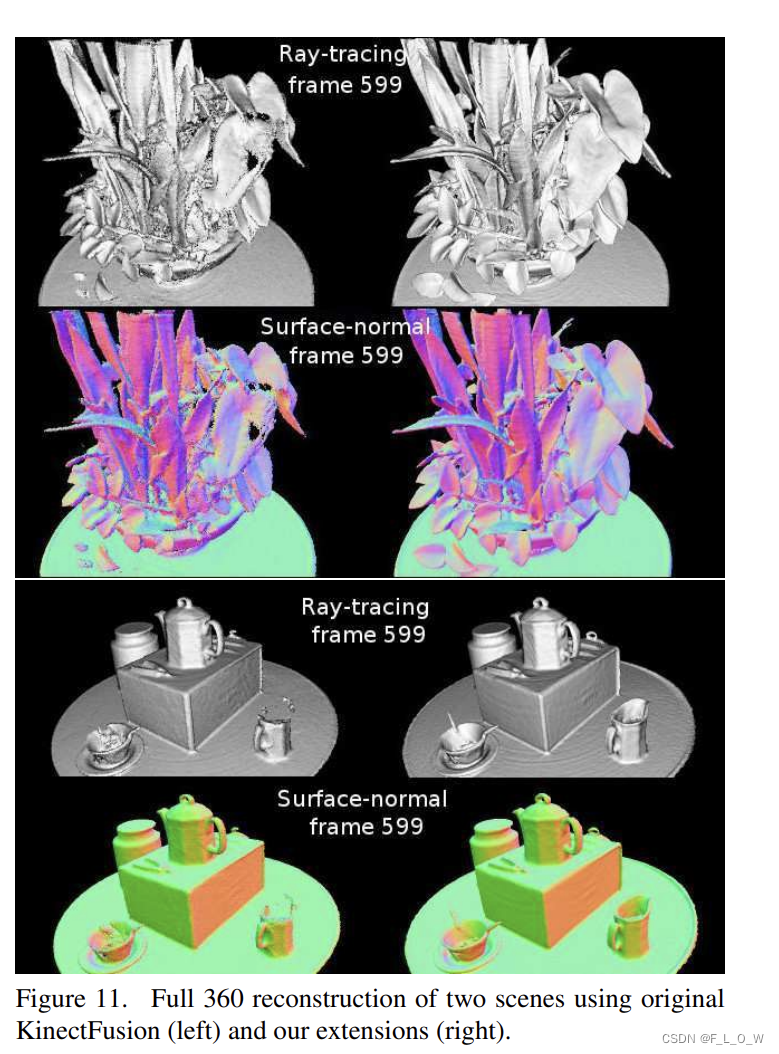
效果如何?
左边是原始结果,右边是引入噪声模型之后的结果:

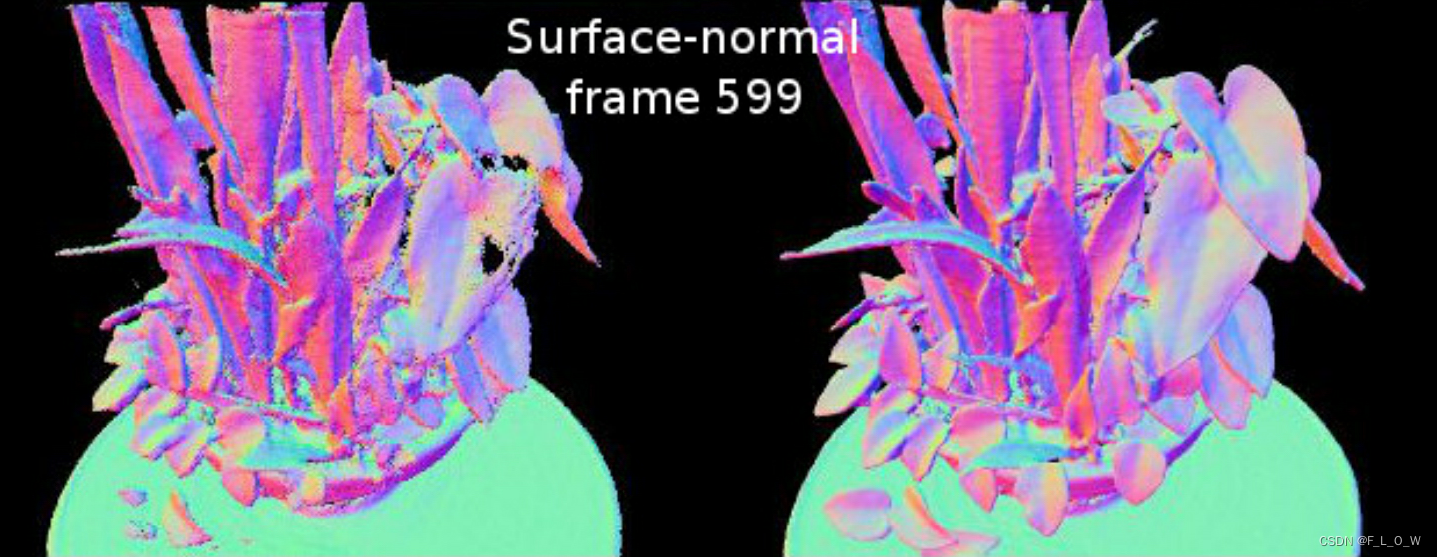

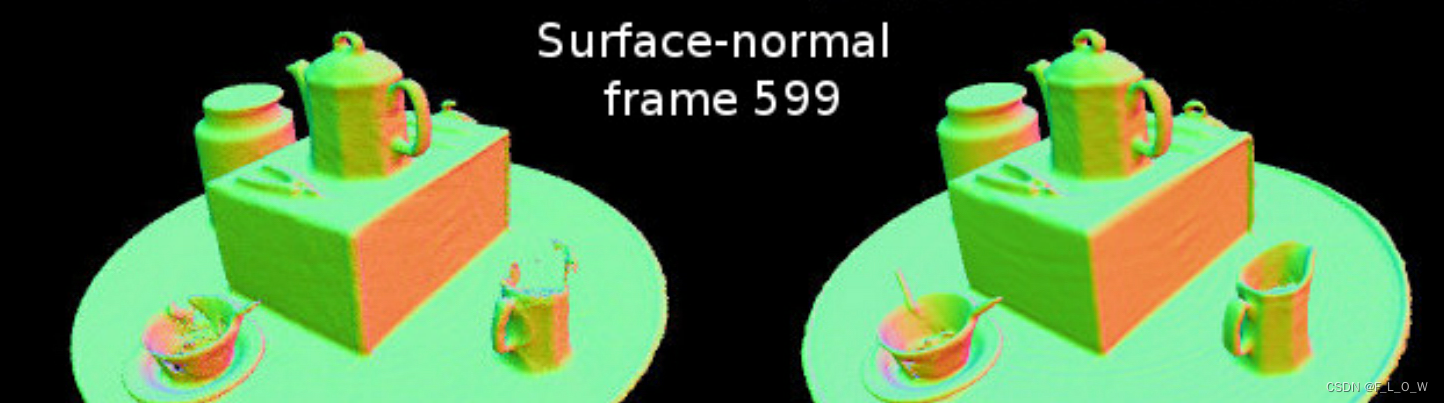

初看只觉得提升了物体的完整性,倒是没太看出来对于细节的提升。
take home message
lateral noise 模型

axial noise 模型
0-60°时:

再考虑到
θ
\theta
θ接近于90°的情况,使用双曲线模型进行拟合,最终有:

实验
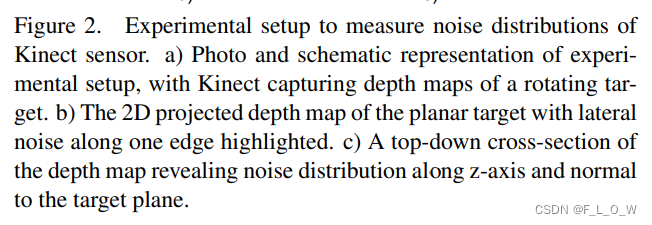
kinect 传感器的噪声,在此我们直接定义为测量深度与实际深度之间的差别。
早些时候,轴向噪声(axial noise)是直接通过比较某一平面物体(比如说门)以及目标测量值(垂直于sensor的z轴)的平均深度而实现。
当sensor距离target越来越远的时候,深度测量值的方差数值呈现出上升的趋势。
但是没有去研究 surface angle或lateral noise。
lateral noise的测量没有那么直观,理想情况下是一种点扩散模型。
完全恢复这种点扩散模型是非常困难的。
一种可选的思路是用sensor的step response function进行近似。
简而言之:
approximate the PSF as the distribution of absolute distances from the observed edge pixels to a fitted straight edge of a planar target
实验设定
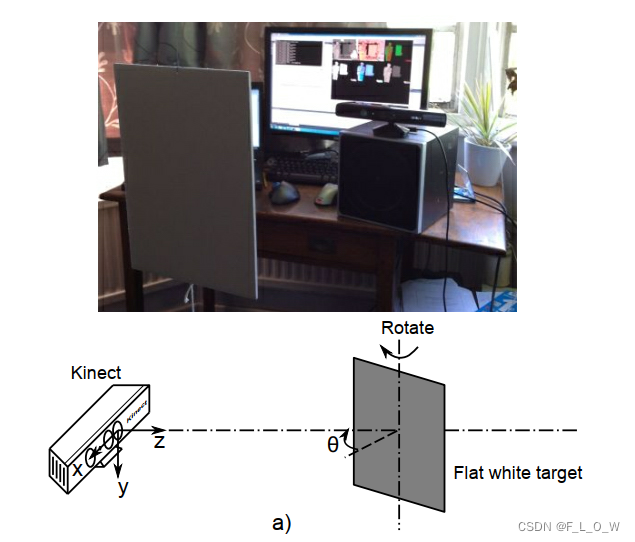
深度成像在0.4m到3.0m之间。
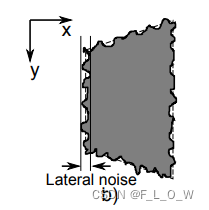
lateral noise与axial noise的定义
lateral noise从深度图的纵向边上进行提取:
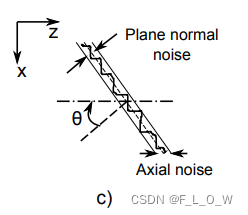
axial noise从raw depth与拟合的plane之间进行提取:
axial noise与lateral noise的提取
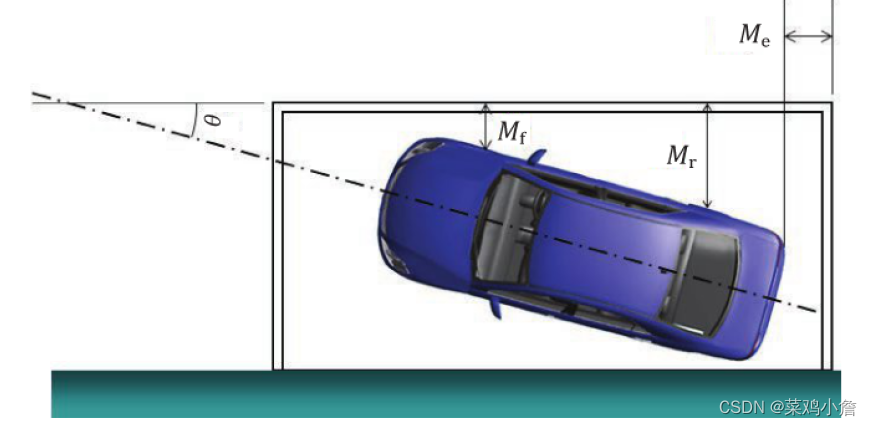
提取lateral noise与axial noise过程的示意图为:
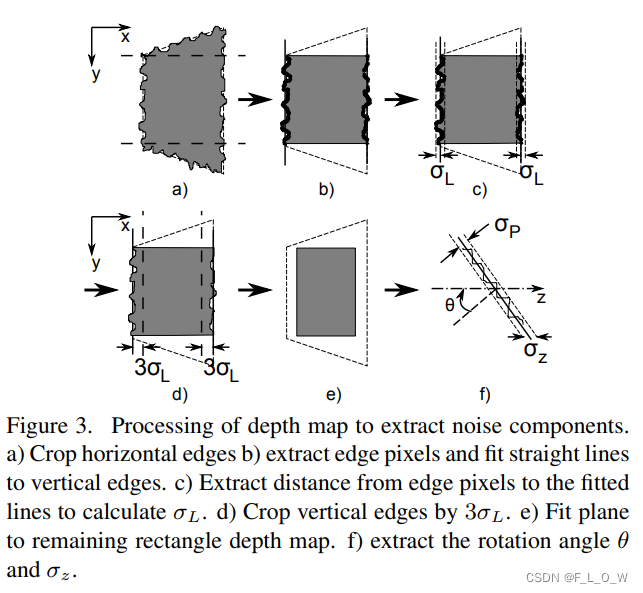
步骤(a)- 步骤(c)的目的是计算得到lateral noise STD
σ
L
\sigma_L
σL:
(a) 裁剪出两条水平边;
(b)提取两条竖直边上的像素点,然后拟合成两条竖直线;
(c)提取边缘像素点到拟合直线的距离,并用于计算lateral noise STD
σ
L
\sigma_L
σL;
(d)向内裁剪两个垂直边三倍
σ
L
\sigma_L
σL;
(e)拟合平面,使得其仍然保持为一个矩形的深度图;
(f)提取旋转角度
θ
\theta
θ以及
σ
Z
\sigma_Z
σZ。
平面拟合可以通过使用orthogonal distance regression来实现。
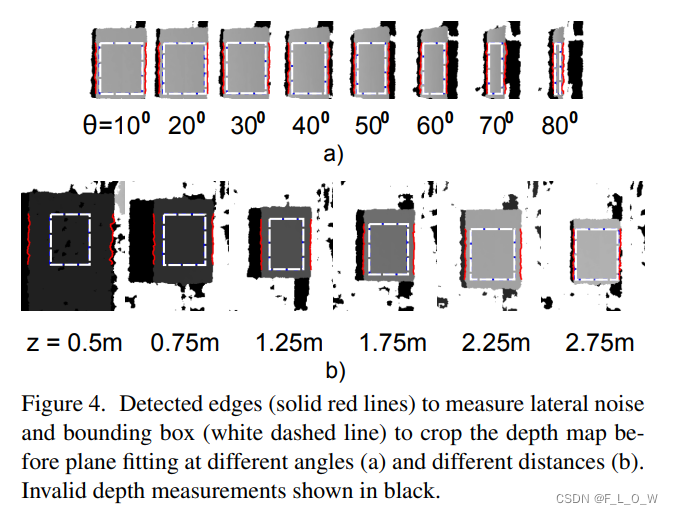
下图为一些不同
z
z
z位置和平面角度的示例:
噪声分布的结果和建模
target的大小是
A
2
A2
A2 -
A
5
A5
A5。
距离从0.5m到2.75m,步距为0.25m。
在每个距离下,抓取了不同角度
θ
\theta
θ的1000张深度图。这会导致在每个角度、每个距离都能够抓取大概10张左右的的深度图。
我们使用:
A
5
A5
A5大小的平面在0.5m、0.75m,
A
4
A4
A4大小的平面在1.0m、1.25m,
A
3
A3
A3大小的平面在1.5m、1.75m,
A
2
A2
A2大小的平面在2.25m、2.5m、2.75m。
使用kinect出厂时候的默认内参来进行镜头检校,fov是70°,等效焦距是585个像素,主点直接定义为图像中心。
三个样例距离的噪声分布有如:
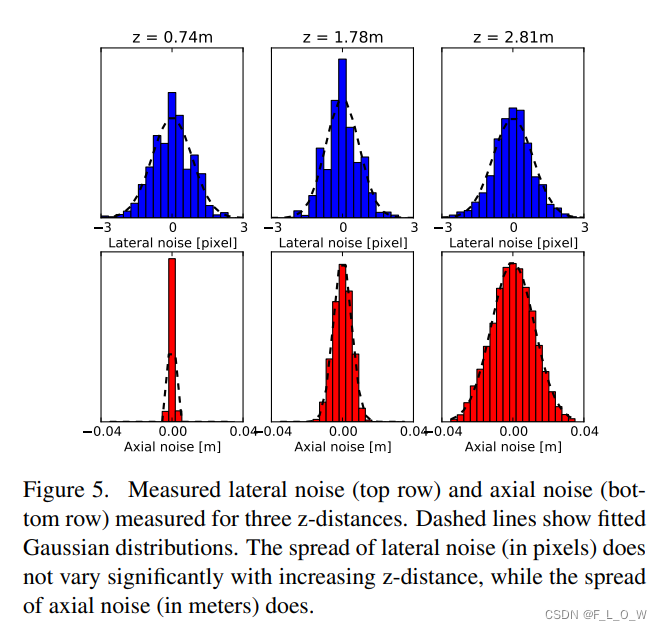
显然,lateral noise几乎不随着深度变化而显著变化。相比之下,axial noise随着深度的增加而显著增加。
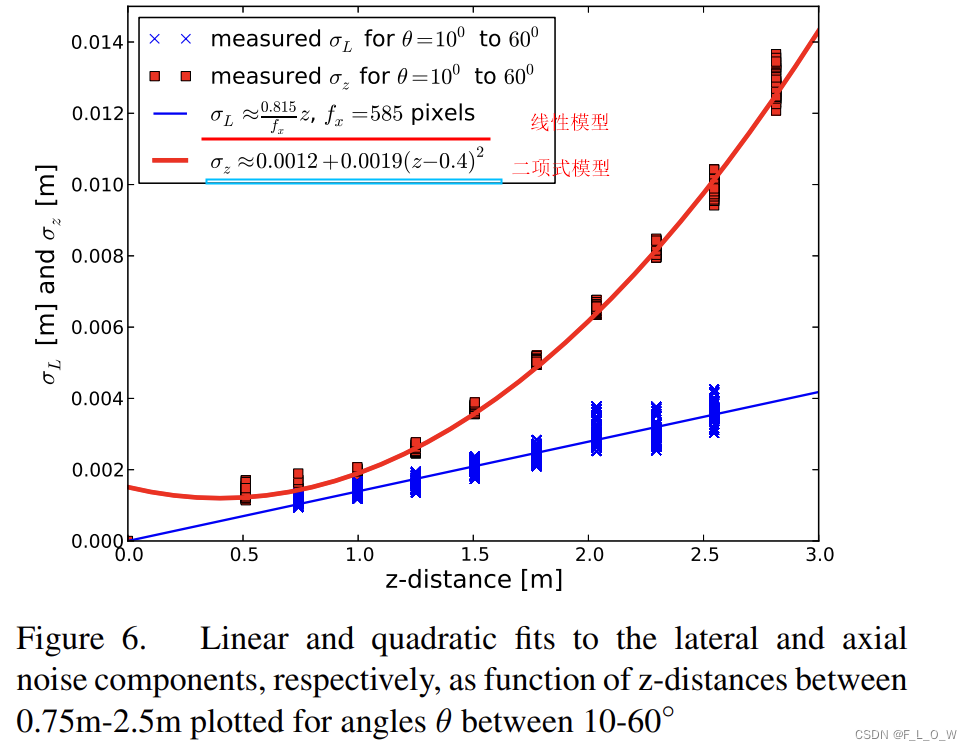
图6则给出lateral noise和axial noise关于z轴距离更加直观的表现,注意,图表中避免了极限surface angle时的情况,因为无效深度像素会使得鲁棒的平面拟合不切实际:
最终拟合得到的lateral noise模型
图7a展示了 lateral noise(单位是像素)关于距离和角度的变化情况:
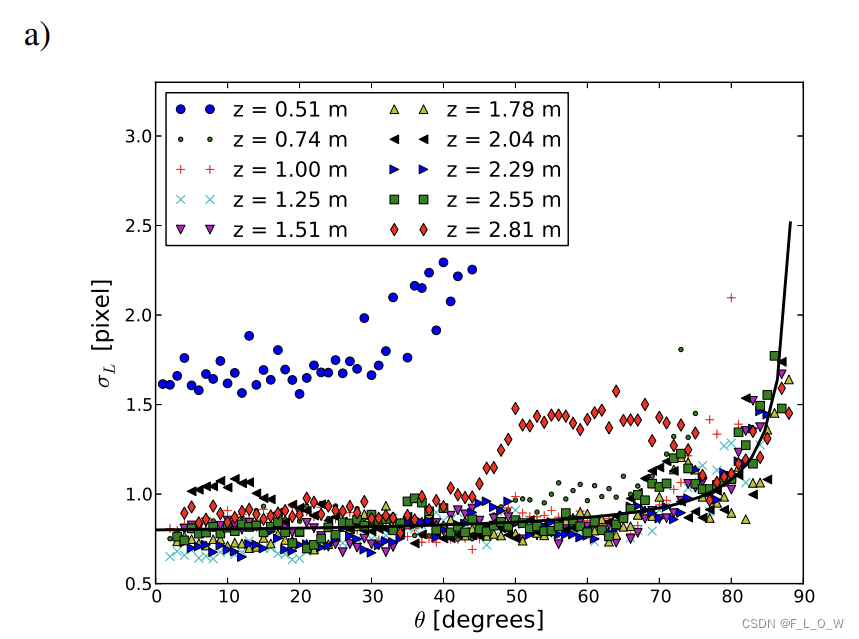
可以发现,
- 除了在 z = 0.5 m z = 0.5m z=0.5m的情况下, σ L \sigma_L σL在其他距离下的变化并不大;
- 在 70°以前, σ L \sigma_L σL呈现微微上升的状态;如果将像素值转换成真实世界中的距离的话,就是图6中所呈现的线性增长情况。
去除小于0.5m以及大于2.8m距离的无效数据,利用常规最小二乘方法回归出线性模型(用于模拟常规接近于70°时的情况)与二次项模型(用于模拟接近于90°时的变化情况)的组合形态,正如上图(a)中黑色曲线所示。
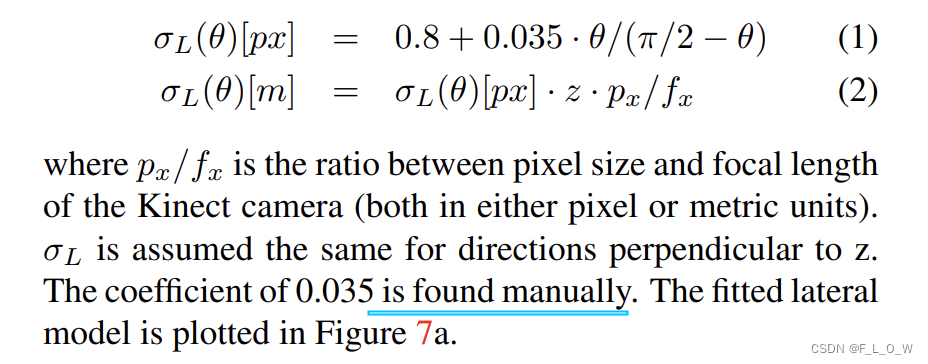
lateral noise在像素和真实世界中的公式分别为:
最终拟合得到的axial noise模型
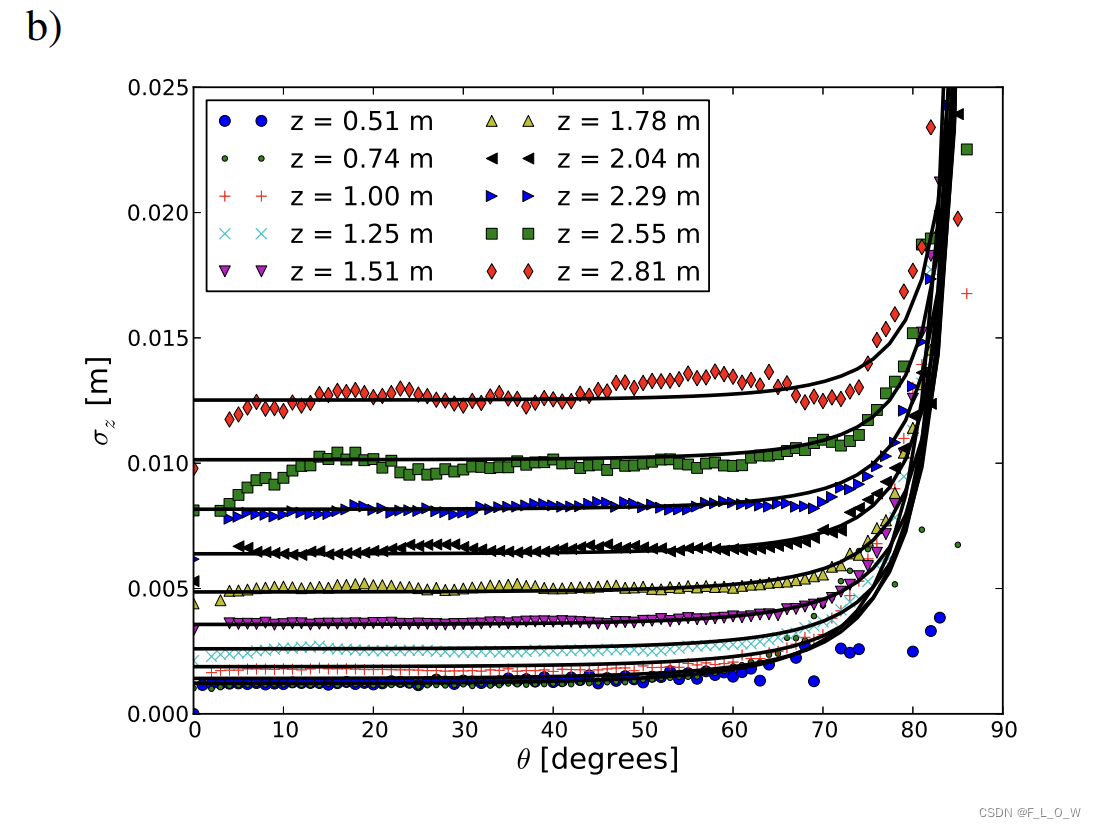
可以看到,
- σ z \sigma_z σz在不同的深度值的体现是非常不一样的,但是对于距离恒定,角度变化的情况下,60度以内基本恒定,90度以上就变得相对陡峭;
- 当距离超过 2.5m的时候, σ z \sigma_z σz在接近于0°的时候会体现较为显著的下降趋势。这主要是因为 Kinect的深度分辨率在远距离会有所下降。
假定在10°-60°之间 z轴向的噪声是恒定的,并使用线性回归来你和得到z轴向噪声与距离之间的关系。
当然,在线性回归的时候避免引入 10° - 60°以外的无效数据。
此时有:
再考虑到
θ
\theta
θ接近于90°的情况,我们使用双曲线模型进行拟合,最终有:

应用噪声模型至KinectFusion
在KinectFusion中,移动的深度相机的pose是通过传统ICP的point-plane变种而实现的。
Drift的减轻主要时通过frame-to-model来实现的。
隐式模型的提取主要有两种方式:ray-casting或marching cubes。
数学标识:
u
=
(
x
,
y
)
\bold{u} = (x, y)
u=(x,y): 深度图上的2D像素坐标;
D
i
(
u
)
\bold{D}_i(\bold{u})
Di(u):在time frame
i
i
i,
u
u
u位置上的深度数值;
K
\bold{K}
K:内参矩阵
v
i
(
u
)
=
D
i
(
u
)
K
−
1
[
u
,
1
]
\bold{v}_i(\bold{u}) = \bold{D}_i(\bold{u}) \bold{K}^{-1}[\bold{u}, 1]
vi(u)=Di(u)K−1[u,1]:对应于深度
u
\bold{u}
u的三维顶点;
v
i
g
=
T
i
v
i
\bold{v}_i^g = \bold{T}_i \bold{v}_i
vig=Tivi: 全局坐标系下的顶点。
数据滤波
一种在3D空间下对Kinect 数据滤波的方式是将噪声PDF建模成
3
∗
3
3 * 3
3∗3的协方差矩阵。
但lateral nosie与深度无关,这会导致协方差矩阵有所冗余。
进而,我们可以直接在二维的深度图上继续进行滤波。
注意,PDF仅仅在Z方向上expand。 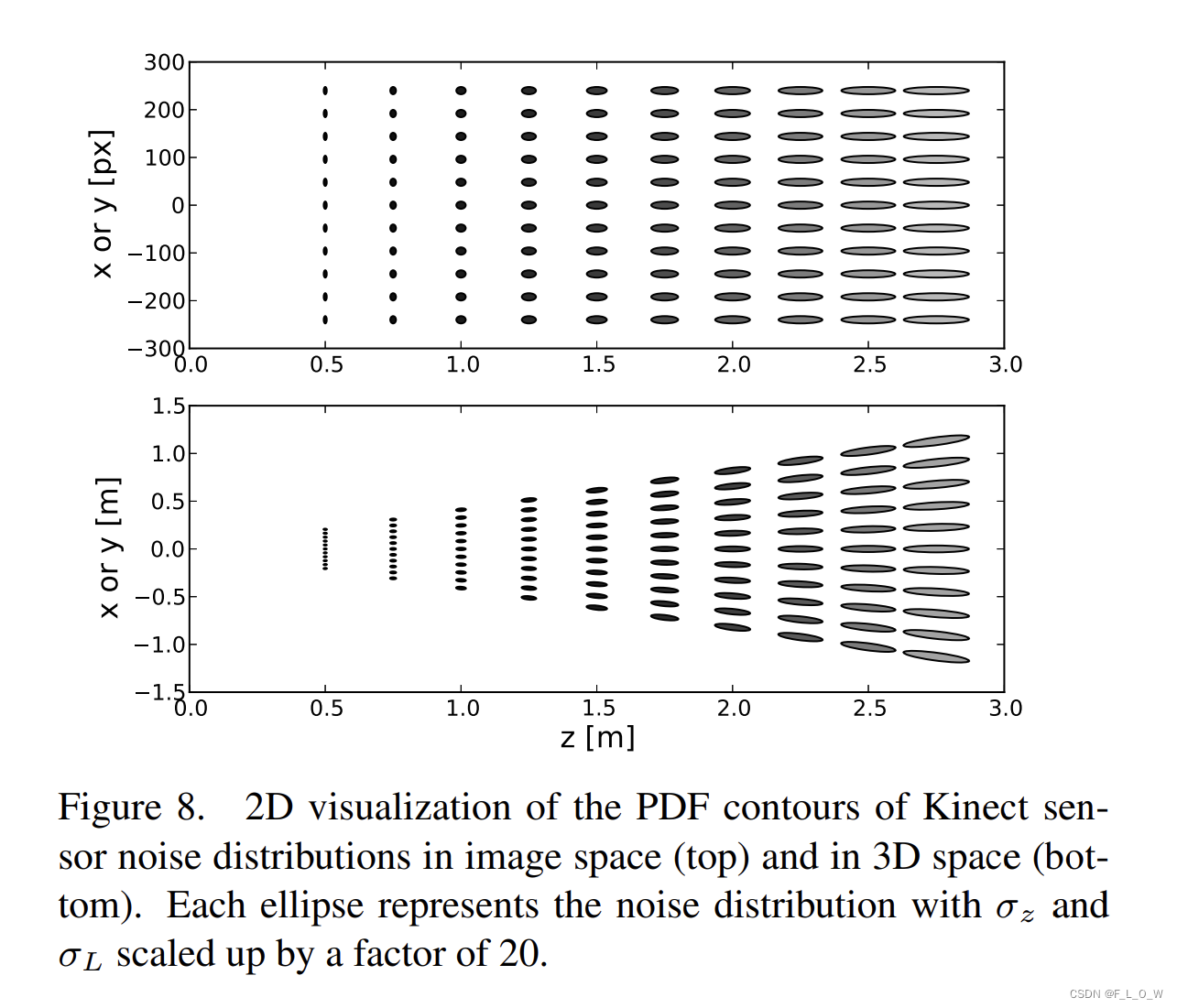
换言之,
σ
L
\sigma_L
σL和
σ
Z
\sigma_Z
σZ可以被直接用于做深度图的保边滤波【怎么理解保边?】。
σ
L
\sigma_L
σL在多数情况下会小于1。
首先使用
3
∗
3
3 * 3
3∗3大小的核对深度图
D
i
\bold{D}_i
Di进行平滑滤波,进而得到平滑后的深度图
D
i
~
(
u
)
\tilde{\bold{D}_i} (\bold{u})
Di~(u)。
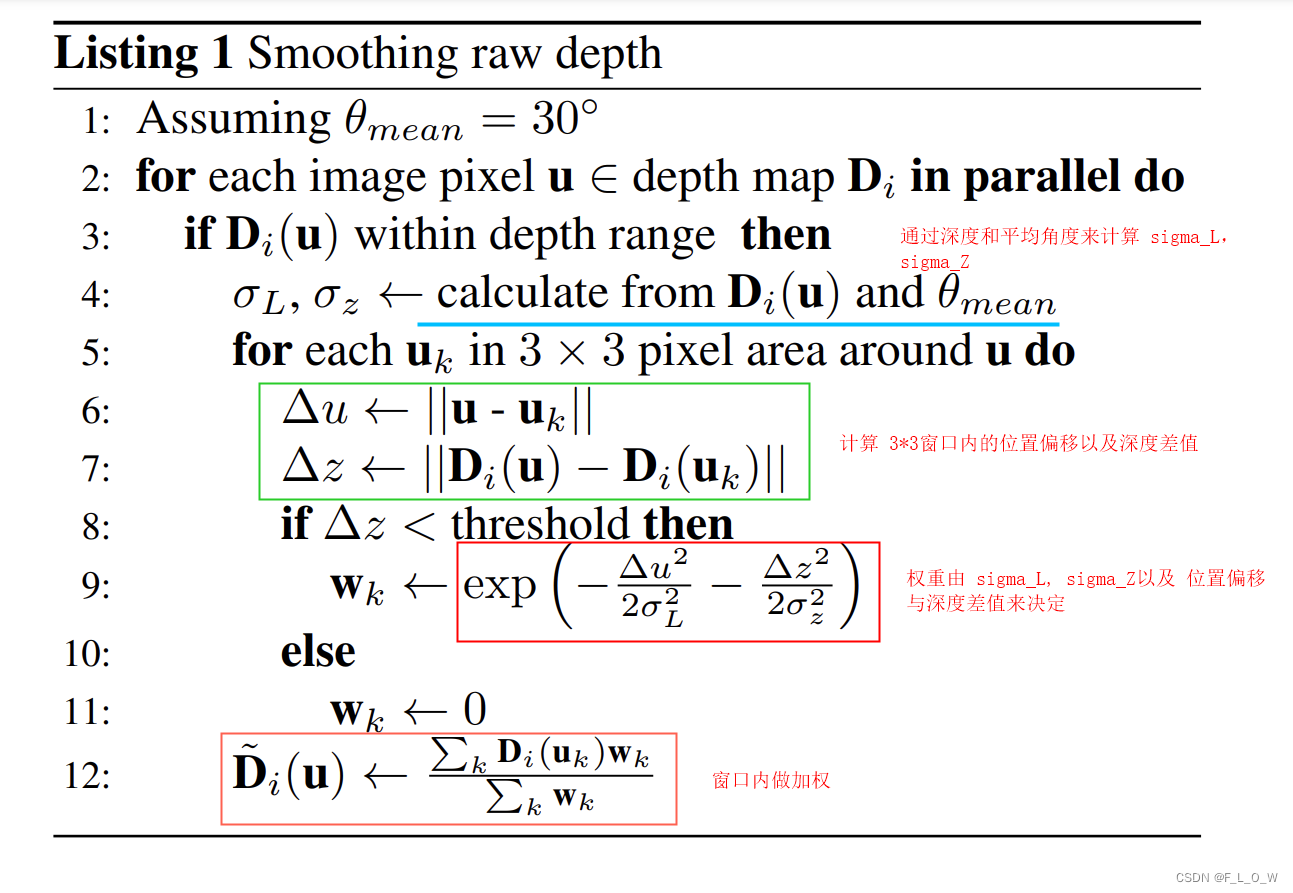
实现代码为:
def modeling_filter(self,img, theta=30, threshold=10, depth_min=100, depth_max=4000,noise_type='normal'):
"""
modeling the noise distribution and filtering based on noise model
:param img: numpy-array,
:param theta: float, average angle between kinect z-axis and object plane.
:param threshold: int, thrshold for 'modeling' and 'modeling_pf' method.
:param depth_min: float, minimum valid depth, we only filter the area of depth > depth_min
:param depth_max: float, maximum valid depth, we only filter the area of depth < depth_max
:param noise_type: 'normal' of 'pf',
'normal': noise modeling based on 'Modeling Kinect Sensor Noise for Improved 3D Reconstruction and Tracking'
'pf': noise modeling based on 'Kinect v2 for Mobile Robot Navigation: Evaluation and Modeling'
:return: denoised img: numpy-array
"""
denoised_img = img.copy()
h, w = img.shape
lateral_noise = self._lateral_noise_pf if noise_type=='pf' else self._lateral_noise
axial_noise = self._axial_noise_pf if noise_type == 'pf' else self._axial_noise
l_noise = np.power(lateral_noise(img, theta), 2)
z_noise = np.power(axial_noise(img, theta), 2)
distance_metrics = np.array([[1.414, 1, 1.414],
[1, 0, 1],
[1.414, 1, 1.414]])
for x in range(h):
for y in range(w):
D_u = img[x, y]
if D_u >= depth_min and D_u <= depth_max:
# 计算 sigma_l, sigma_l
sigmal_l = l_noise[x, y]
sigmal_z = z_noise[x, y]
D_k = img[max(x - 1, 0):x + 2, max(y - 1, 0):y + 2]
delta_z = abs(D_k - D_u)
delta_u = distance_metrics[int(x == 0):2 + int(x < h - 1), int(y == 0):2 + int(y < w - 1)]
mark = delta_z < threshold
D_k_list = D_k[mark].flatten()
u_list = delta_u[mark].flatten()
z_list = delta_z[mark].flatten()
if len(D_k_list) > 0:
w_k_list = np.exp(- u_list ** 2 / (2 * sigmal_l) - z_list ** 2 / (2 * sigmal_z))
denoised_img[x, y] = np.sum(D_k_list * w_k_list) / w_k_list.sum()
return denoised_img
从平滑后的深度图中,我们可以引出得到法向量图:

所谓的surface angle也就是 法向量方向与相机z轴方向之间的夹角,即:
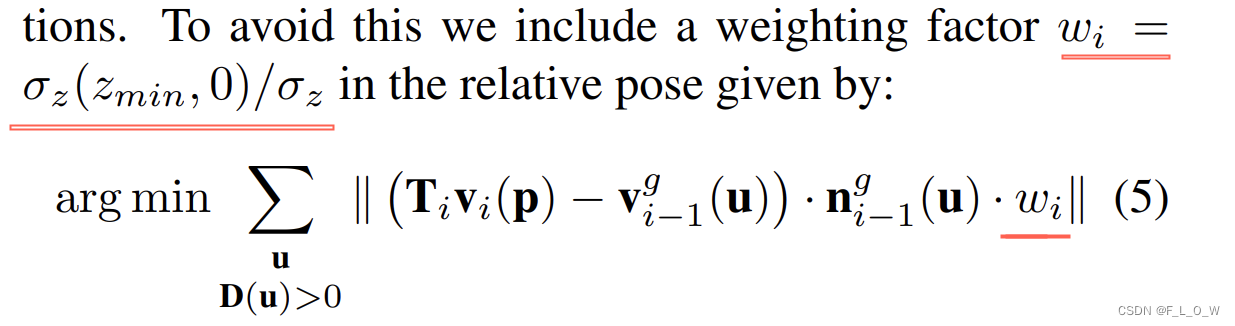
位姿估计: 加权ICP
数据关联的方式为:projective data association。
在数据关联的过程中,不仅仅使用了距离以及法向的阈值,还限制了
需要小于 70°。
point-plane 能量函数线性化的前提假设是上一个pose到下一个pose之间的移动是非常小的。
这种方式会使得每一个数据都有着一样的重要程度,可能会导致次优解。
因此,这里引入加权的概念,即有:
Volumetric depth map fusion
为了更好地适应高斯形态的axial-noise,进一步提出在voxel grid中的tsdf编码,主要是基于axial noise pdf的cdf。
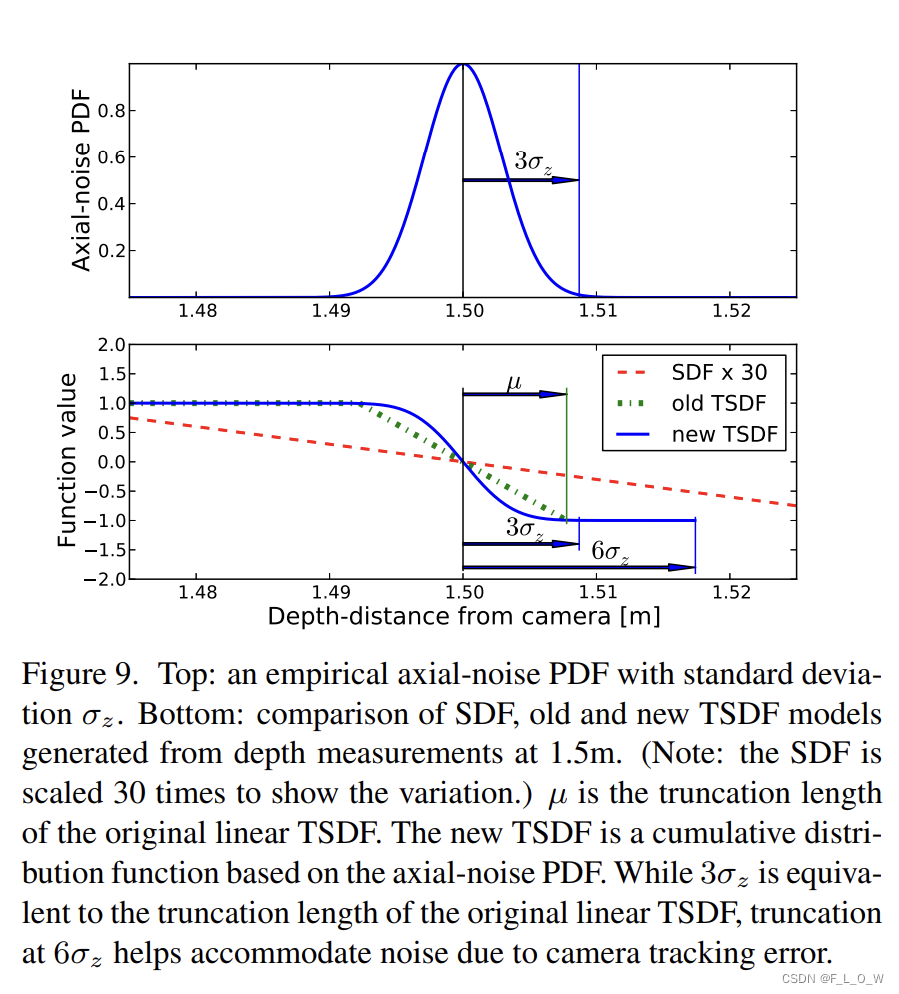
在最原始的sdf中, truncation length μ \mu μ主要用于去评估不确定性。在此,我们直接将其设置为 3 σ z 3 \sigma_z 3σz。
在实验中,当截断长度为 6 σ z 6 \sigma_z 6σz的时候,可以进一步地包容住相机tracking的误差。
随着ICP误差的逐步减小,truncation length可以被自适应地从 6 σ z 6 \sigma_z 6σz降低至 3 σ z 3 \sigma_z 3σz。
这个过程的伪代码是:
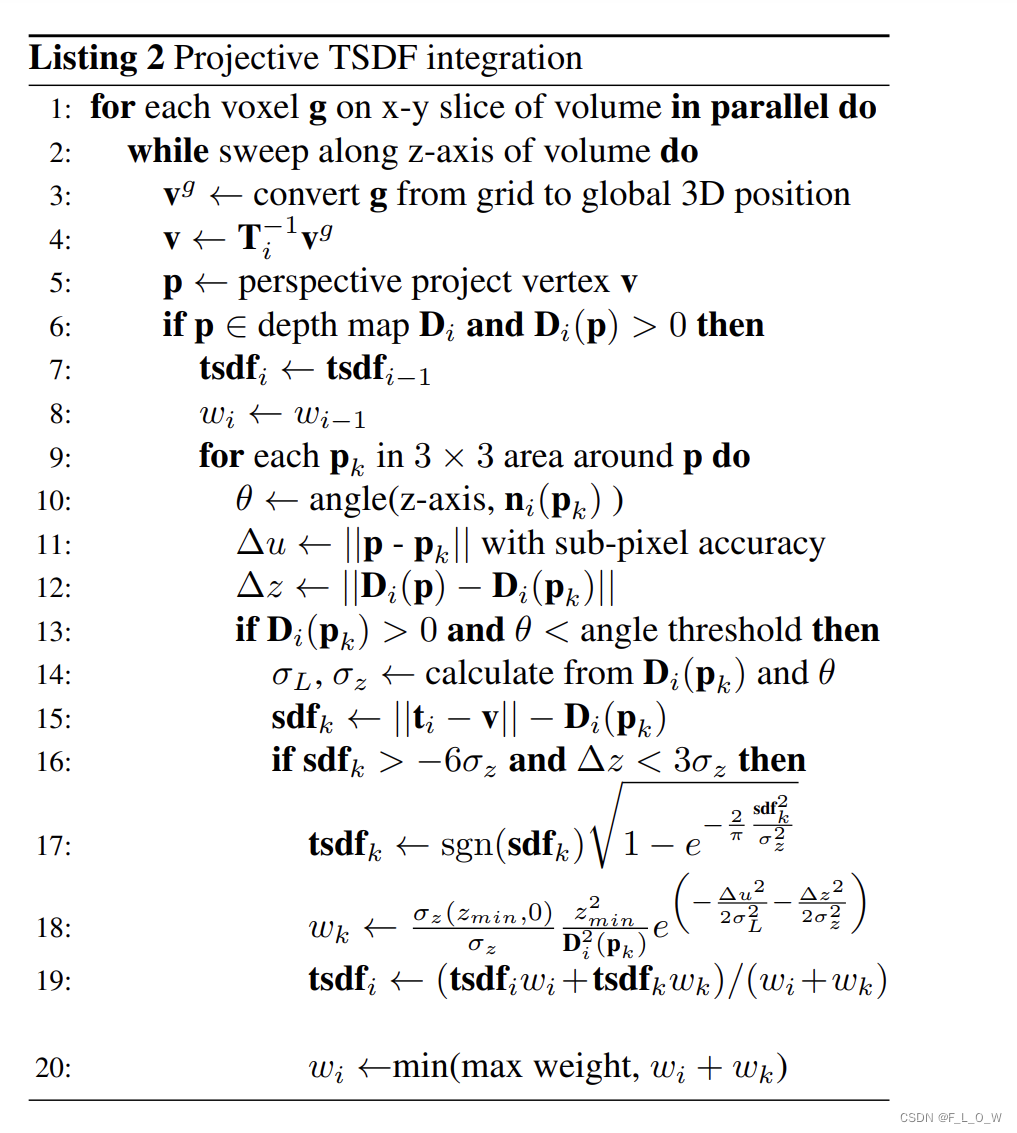
上述伪代码的第17行是一个近似的高斯CDF的修改版本,可以使得产生的数值在 [-1,1]之间。
而
s
d
f
k
sdf_k
sdfk则指代原本KinectFusion算法中的sdf数值。
在原始的KinectFusion系统中,如果下一帧融合进来的点云距离表面比较远(比如说噪声),却会以同样的权重intergrate进来,就会导致几何特征有所丢失。
为了避免这个问题,标准化的项会被加进voxel weight中,如上述伪代码的第18行所示。其中,指数项就是noise distribution weight。
项 主要用来自适应 3D noise 分布的宽度,在深度增加的情况下尽量覆盖更多的voxels。
主要用来自适应 3D noise 分布的宽度,在深度增加的情况下尽量覆盖更多的voxels。
项 accounts for increased length of the distribution for larger z-depths:
accounts for increased length of the distribution for larger z-depths:
重建与tracking结果
代码分析
初始化
从去噪滤波初始化的“flag”可以看出来,设计了四种方式:“modeling”、“modeling_pf”、“anisotropic”、“gaussian”。
我们主要关注“modeling”的方式: 使用kinect v2 噪声模型进行滤波,‘Modeling Kinect Sensor Noise for Improved 3D Reconstruction and Tracking’。,需要指定的参数为:
class Denoising_Filter(object):
"""
Denoising filter can be used to improve the resolution of the depth image
"""
def __init__(self, flag='modeling',theta=30, threshold=10,depth_min=100,depth_max=4000,
ksize=5, sigma=0.1,niter=1,kappa=50,gamma=1,option=1):
"""
:param flag: string, specific methods for denoising.
'modeling': filter with Kinect V2 noise model, 'Modeling Kinect Sensor Noise for Improved 3D Reconstruction and Tracking'
'modeling_pf': another Kinect V2 noise modeling by Peter Fankhauser, 'Kinect v2 for Mobile Robot Navigation: Evaluation and Modeling'
'anisotropic': smoothing with anisotropic filtering, 'Scale-space and edge detection using anisotropic diffusion'
'gaussian': smoothing with Gaussian filtering
:param theta: float, the average angle between Kinect z-axis and the object plane.
Used to calculate noise in the 'modeling' and 'modeling_pf' method
:param threshold: int, thrshold for 'modeling' and 'modeling_pf' method.
:param depth_min: float, minimum valid depth, we only filter the area of depth > depth_min
:param depth_max: float, maximum valid depth, we only filter the area of depth < depth_max
:param ksize: int, Gaussian kernel size
:param sigma: float, Gaussian kernel standard deviation
:param niter: int, number of iterations for anisotropic filtering
:param kappa: int, conduction coefficient for anisotropic filtering, 20-100 ?
:param gamma: float, max value of .25 for stability
:param option: 1 or 2, options for anisotropic filtering
1: Perona Malik diffusion equation No. 1
2: Perona Malik diffusion equation No. 2
"""
self.flag=flag
self.f_x = 585 #focal length of the Kinect camera in pixel
if flag=='modeling' or flag=='modeling_pf':
self.threshold = threshold
self.depth_min = depth_min
self.depth_max = depth_max
self.theta = theta
self.noise_type='pf' if flag=='modeling_pf' else 'normal'
self.filter = partial(self.modeling_filter,theta=theta,
threshold=threshold, depth_min=depth_min,
depth_max=depth_max,noise_type=self.noise_type)
elif flag=='gaussian':
self.ksize = ksize
self.sigma = sigma
self.filter = partial(cv2.GaussianBlur,ksize=(ksize,ksize),sigmaX=0)
elif flag=='anisotropic':
self.niter = niter
self.kappa = kappa
self.gamma=gamma
self.sigma=sigma
self.option=option
self.filter = partial(self.anisotropic_filter,niter=niter,kappa=kappa,
gamma=gamma,sigma=sigma)
if flag not in self.all_flags:
raise('invalid flags. Only support:', self.all_flags)