一、问题描述
假设你现在在做自动驾驶的汽车,你想着首先应该做一个汽车检测系统,为了搜集数据,你已经在你的汽车前引擎盖上安装了一个照相机,在你开车的时候它会每隔几秒拍摄一次前方的道路。
您已经将所有这些图像收集到一个文件夹中,并通过在您找到的每辆车周围画边界框来标记它们。下面是一个关于边框的例子:
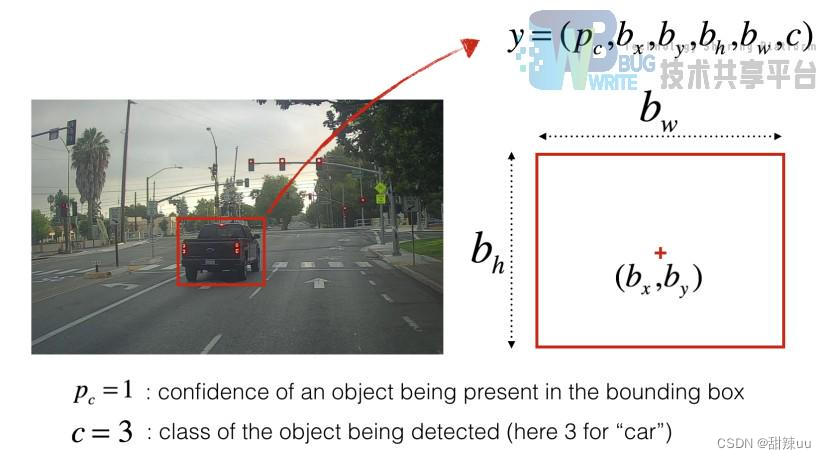
假如你想让YOLO识别80个类别的物体(见coco_classes.txt文件),你可以把分类标c从1-80进行标记,或者把它变成80维的向量(80
假设你现在在做自动驾驶的汽车,你想着首先应该做一个汽车检测系统,为了搜集数据,你已经在你的汽车前引擎盖上安装了一个照相机,在你开车的时候它会每隔几秒拍摄一次前方的道路。
您已经将所有这些图像收集到一个文件夹中,并通过在您找到的每辆车周围画边界框来标记它们。下面是一个关于边框的例子:
假如你想让YOLO识别80个类别的物体(见coco_classes.txt文件),你可以把分类标c从1-80进行标记,或者把它变成80维的向量(80
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/183571.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!