目录
前言:
小车效果展示:
5路数字灰度传感器:
巡线思路:
加入PID调节的代码:
前言:
之前买了一批5路灰度传感器,想用这传感器进行循迹,无奈网上和官方的资料提供的还是比较少,这里还是做一下当初的学习记录。
小车效果展示:
STM32RCT6主控,5路灰度寻迹,超声波HC_SR04中断式测距,蓝牙模块HC_08通信,AS4950电机驱动芯片,减缓了MPU6050零漂问题,PID丝滑_哔哩哔哩_bilibili
5路数字灰度传感器:
这是某宝上买的5路灰度传感器,价格稍微有点贵,50多块一个。当然,一分钱一分货,这个模块可以用小螺丝刀来调节传感器上面的旋钮,通过这个旋钮来调节灵敏度,这个灵敏度调节好了的话可以识别黑白循迹、红白循迹。所以还是比较值得的。
对于这款5路数字灰度传感器来说。识别到黑线,传回来的数字量就是0,识别到白色,传回来的数字量就是1。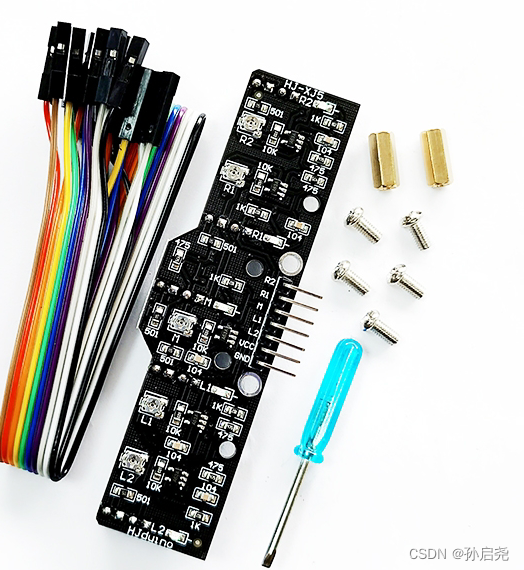
巡线思路:
博主想着用这5路的中间三路来巡线,用最左和最右端的传感器用来识别十字或者丁字路口,巡线时,加入PID算法,遇到十字或者丁字路口就用最左和最右的传感器来识别,识别到了之后,我们就可以搭配MPU6050进行转90°弯了。
加入PID调节的代码:
其中 sensor_bias 是根据中间三路传感器和黑线的相对位置来估计出的误差(如果你要问我怎么得来的,其实这个数据大差不差就行,它只是为PID服务的一个变量罢了,甚至你可以把62.5改成50,最后只要调好PID三个参数,达到的效果是一样的),这里的decide类似于状态机的信号,我令decide为6的时候,也就是小车跑出了黑线,小车停止。
#include "sensor.h"
#include "stm32f10x.h"
#include "move.h"
#include "motor.h"
#include "FSM.h"
//STEER4 --> PA11 --> R2 红线
//STEER3 --> PC9 --> R1 橘线
// --> PB4 --> M0 黄线
//STEER1 --> PA6 --> L1 绿线
//ENCODE1_A --> PB5 --> L2 棕线
float Kp_sensor = 8.134, Ki_sensor = 0.021, Kd_sensor = 2.36;//pid弯道参数参数
float sensor_bias = 0;
float sensor_bias_last = 0;
float P = 0, I = 0, D = 0, PID_value = 0; //pid直道参数
int decide;
unsigned char move_flag;
extern unsigned char FSM_state;
void sensor_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);//开启C时钟 PC9
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
//GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//这句话其实可以不用,在使用输入功能时,不需要配置频率
GPIO_Init(GPIOC, &GPIO_InitStructure);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//开启A时钟 PA11 PA6
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11|GPIO_Pin_6;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_NoJTRST, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//开启B时钟 PB4 PB5
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
unsigned char times;
extern unsigned char FSM_hc08;
unsigned char back_flag;
unsigned char one_time;
unsigned char one_flag;
unsigned char channel_num;//channel的存在导致发送2号通道的时候只会进入一次
void sensor_read()
{
if((L2 == 1)&&(L1 == 1)&&(M0 == 1)&&(R1 == 0))// 1 1 1 0
{
if(one_time == 0)
{
if(FSM_hc08 == Channel_1)
{
FSM_state = Turn_lift_state;//跳出循环,将PID分别清零。
one_time++;
P = 0;I = 0; D = 0;
}
else if(FSM_hc08 == Channel_2)
{
if(one_flag == 0)
{
channel_num++;
one_flag = 1;
}
if(channel_num == 2)
{
FSM_state = stay2_state;//跳出循环,将PID分别清零。
one_time++;
P = 0;I = 0; D = 0;
}
}
}
}
else if((L1 == 0)&&(M0 == 1)&&(R1 == 0))// 0 1 0
{
sensor_bias = 0;decide = 3;one_flag = 0;//积分项清零
}
else if((L1 == 1)&&(M0 == 1)&&(R1 == 0))// 1 1 0
{
sensor_bias = -62.5;decide = 2;
}
else if((L1 == 0)&&(M0 == 1)&&(R1 == 1))// 0 1 1
{
sensor_bias = 62.5;decide = 2;
}
else if((L1 == 1)&&(M0 == 0)&&(R1 == 0))// 1 0 0
{
sensor_bias = -125;decide = 4;
}
else if((L1 == 0)&&(M0 == 0)&&(R1 == 1))// 0 0 1
{
sensor_bias = 62.5;decide = 4;
}
else if((L1 == 0)&&(M0 == 0)&&(R1 == 0))// 0 0 0
{
decide = 6;
}
else if((L1 == 1)&&(M0 == 1)&&(R1 == 1))// 1 1 1
{
decide = 6;FSM_state = Judge_state; //如果读取到了整条黑线,那么就进入下一状态
if(back_flag == 1)
{
FSM_state = Back_state;
back_flag = 0;
} //第一次识别到全黑线为小车停止线。第二次识别到,代表小车即将回归循迹
}
}
void Sensor_pid()
{
if(decide<=5)
{
P = sensor_bias;
I = I + sensor_bias;
D = sensor_bias-sensor_bias_last;
PID_value = Kp_sensor*P + Ki_sensor*I + Kd_sensor*D;
sensor_bias_last = sensor_bias;
//对积分值设置一个限制,防止积分值超标
if(I >=3500)I = 3500;
if(I <= -3500)I = -3500;
PWM_value_R = 2099 - (int)PID_value;
PWM_value_L = 2099 + (int)PID_value;//当线在左,左轮要慢,右轮要快,左轮要加,右轮要减,但这里的偏差是负值
Motor3_forward(PWM_value_R);
Motor4_forward(PWM_value_L);
//4 --> 右电机
//3 --> 左电机
}
else{
Move_stop();
}
}
对应的头文件部分
#ifndef __SENSOR_H
#define __SENSOR_H
//STEER4 --> PA11 --> R2 绿线
//STEER3 --> PC9 --> R1 黄线
// B --> PB6 --> M0 橘线
//STEER1 --> PA6 --> L1 红线
// A --> PB7 --> L2 白线
// 灰度传感器,当传感器识别到黑线的时候,输出为1,其余时刻输出为0
// 所以在这里我们要使用下拉输入
#define L2 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_5)
#define L1 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_6)
#define M0 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_4)
#define R1 GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_9)
#define R2 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_11)
void sensor_Init(void);
void sensor_read(void);
void Sensor_pid(void);
#endif



![[Rust笔记] 规则宏的“卫生保健”](https://img-blog.csdnimg.cn/img_convert/c3bf7a8936a48cb0e53e80e93cf1d079.png)