前言:
寒假已经过了一半了,前段时间跟学弟一起从零开始搞了一下深度学习,现在才想起来这个系列还没有更完。本篇博客主要介绍一下这个小车转直角弯的神器----MPU6050
MPU6050介绍:
我所采用的MPU6050是某宝上十几块钱的这种,这种MPU6050有个缺点是带有零点漂移,这个接下来我会在博客里给大家提供我的解决方案,优点显而易见是便宜,如果坏了也不心疼,这可比正点原子的便宜多了。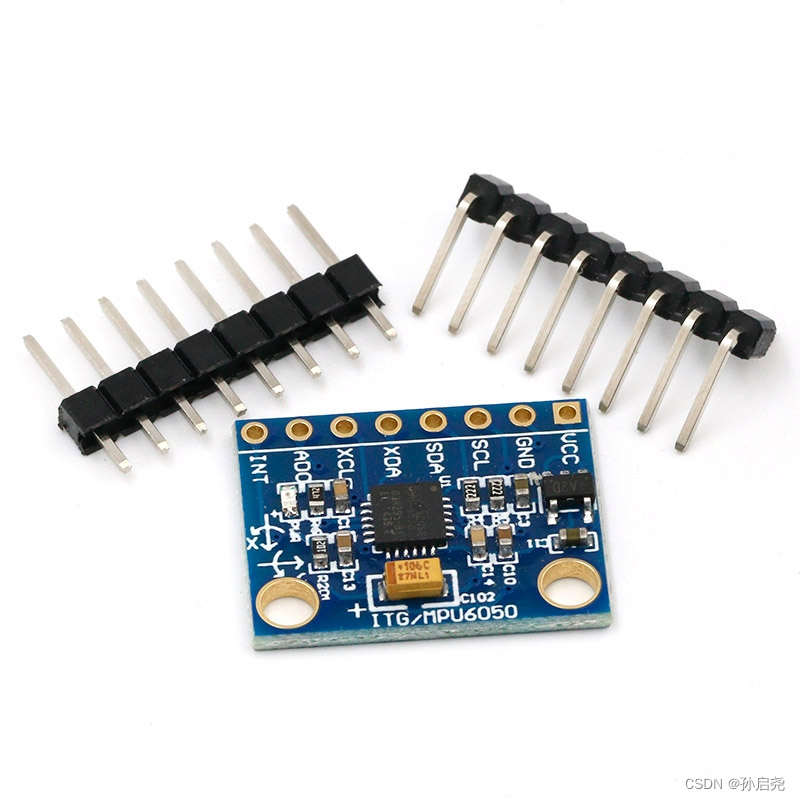 MPU6050内部整合了三轴MEMS陀螺仪、三轴MEMS加速度计以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),而且还可以连接一个第三方数字传感器(如磁力计),这样的话,就可以通过IIC接口输出一个9轴信号(链接第三方数字传感器才可以输出九轴信号,否则只有六轴信号)。当然,上面给大家展示的就是一个6轴的陀螺仪。更加方便的是,有了DMP,可以结合InvenSense公司提供的运动处理资料库,实现姿态解算。通过自带的DMP,可以通过IIC接口输出9轴融合演算的数据,大大降低了运动处理运算对操作系统的负荷,同时也降低了开发难度。其实,简单一句话说,陀螺仪就是测角速度的,加速度传感器就是测角加速度的,二者数据通过算法就可以得到PITCH、YAW、ROLL角了。
MPU6050内部整合了三轴MEMS陀螺仪、三轴MEMS加速度计以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),而且还可以连接一个第三方数字传感器(如磁力计),这样的话,就可以通过IIC接口输出一个9轴信号(链接第三方数字传感器才可以输出九轴信号,否则只有六轴信号)。当然,上面给大家展示的就是一个6轴的陀螺仪。更加方便的是,有了DMP,可以结合InvenSense公司提供的运动处理资料库,实现姿态解算。通过自带的DMP,可以通过IIC接口输出9轴融合演算的数据,大大降低了运动处理运算对操作系统的负荷,同时也降低了开发难度。其实,简单一句话说,陀螺仪就是测角速度的,加速度传感器就是测角加速度的,二者数据通过算法就可以得到PITCH、YAW、ROLL角了。
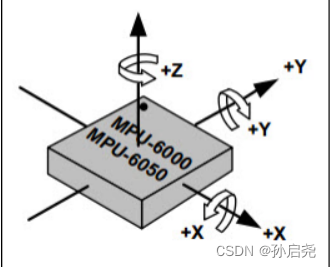
MPU6050对陀螺仪和加速度计分别用了三个16位ADC,将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的。陀螺仪的可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。
下面是一张关于MPU6050的三个姿态角。而刚才提到的零飘问题其实就是Z轴角度出了问题。
管脚的使用:
MPU6050一共有8个引脚,网上不少博主选择使用其中的5个引脚,而我选择了其中的四个引脚,没有使用INT这个引脚。这个引脚是MPU6050的中断引脚,MPU6050会50ms中断一次,我的板子上IO口不是很丰富,就没有用这个引脚。而AD0作为一个地址引脚决定了MPU6050的地址,它接地或者悬空的时候,MPU的地址为0x68,接高电平的时候,MPU的地址为0x69(博主直接悬空了)。而XCL和XDA是用来外接传感器的,这里我没有外接,所以也悬空了。此外,MPU6050的SCL和SDA,我用的是PB8、PB9来软件模拟的IIC,而不是STM32自带的硬件IIC。
| MPU6050管脚 | 对应的STM32F103RCT6 IO口 |
| SCL | PB8 |
| SDA | PB9 |
| VCC | VCC(3.3v或5v) |
| GND | GND |
代码修改部分:
这里我给大家展示一下对应的.c和.h文件。这里的文件涉及到的比较多,博主在自学的时候学习了很多博主的代码,发现其中缺的东西很多,要不是少sysclock.h要不就是少sys.h,干脆这里我一并给大家放上一个链接,STM32F103C8T6驱动MPU6050并且在OLED屏幕上显示。提取码:2471
这里我要给大家强调一下,如果delay函数不对的话,很可能会导致MPU6050的IIC时序不对而发生错误,所以大家最好是参照一下我的文件。此外要给大家强调的一点是如果大家用的管脚不是PB8 PB9而要修改其他的IO口的话,那么除了这里要修改。
对应的IO操作方向也要注意,这里给大家提个醒,当初我就是没有仔细修改这里,而导致多次初始化失败,具体修改方法可以参考数据手册

移植完成后,我们就可以通过Read_DMP(&Pitch,&Roll,&Yaw);这个函数来读取对应的角度,这个角度是由DMP结算过的,所以可以拿过来就直接用。
是否需要扶正,是否需要开机校准
关于这个问题,我并没有出现过网上说的不扶正就不能开机,博主的小车只是用了MPU6050来准确的转一下90°角,所以也就没有过多关注这一块。是否需要开机校准,我觉得还是需要的,当你转过一个90°弯之后,我们可以通过重新让MPU6050初始化,来把转完弯后的方向设置为0°方向,这样方便下一次转弯,在代码逻辑上会减轻不少工作量。
如果选择开机校准的话,那么我们就要让run_self_test()函数正常运行
static void run_self_test(void)
{
int result;
long gyro[3], accel[3];
result = mpu_run_self_test(gyro, accel);
if (result == 0x3) {
/* Test passed. We can trust the gyro data here, so let's push it down
* to the DMP.
*/
float sens;
unsigned short accel_sens;
mpu_get_gyro_sens(&sens);
gyro[0] = (long)(gyro[0] * sens);
gyro[1] = (long)(gyro[1] * sens);
gyro[2] = (long)(gyro[2] * sens);
dmp_set_gyro_bias(gyro);
mpu_get_accel_sens(&accel_sens);
accel[0] *= accel_sens;
accel[1] *= accel_sens;
accel[2] *= accel_sens;
dmp_set_accel_bias(accel);
printf("setting bias succesfully ......\r\n");
}
}博主在让小车完成指令的过程中,采用了状态机的思路(FSM),当小车转弯一个90°之后,即将进入下一个状态的时候,我让MPU6050重新初始化,方便下一次转弯。
IIC_Init();
MPU6050_initialize(); //=====MPU6050初始化
DMP_Init();
Yaw1 = 0; //yaw1角度是缓解零飘问题的产物,这里也需要清零。缓解yaw角零飘问题:
这个问题其实困扰我很久,当时将MPU6050加到小车上的时候,我使用JLINK给板子烧录程序时,在OLED显示屏上看到的零飘很小,我猜测可能是有JLINK和电池一起供电的原因。我将JLINK断开后,使用电池给板子供电,零飘一秒能有2到3°,这就很离谱了,我从知乎一篇文章那里找到了一个软件的解决方案,那就是按照它的漂移规律,写一个可以随时间变换角度的函数来减缓这个趋势。我一并把代码粘出来,我将这个代码放到了TIM7定时器里,每10ms中断一次,把处理过的角度用OLED显示一下,大概是1分重才漂移1°,这就符合我们的要求了,而这个yaw1就是我们处理过后的角度。
if(++mpu_count == 6000)mpu_count = 0;
Read_DMP(&Pitch,&Roll,&Yaw);
yaw1 = Yaw - 0.001*mpu_count-0.49;
转弯函数:
这个转弯函数是一个比较简单的写法,我通过两轮的差速来让小车进行转弯,同时利用MPU6050来时刻测算角度,满足指定角度之后,就停止差速转弯。
这里要注意的一点是,MPU6050在旋转的过程中,如果到了180°左右,会突然变成0,这就说明这时候小车转弯转过了,就要给MPU6050加上一个角度大于0的限制,否则一旦跃变成0,那肯定会不停地旋转。
#include "stm32f10x.h"
#include "move.h"
#include "MPU6050.h"
#include "motor.h"
#include "FSM.h"
extern float Yaw1;
//float Target_Left = 85.000;
float bias_r; //左转函数用到的偏差
float bias_last_r; //左转函数用到的上一次偏差
float bais_error;
float bias_l;
float bias_last_l;
float media_r;
unsigned char stop_flag;
void turn_right_90(float Yaw1,float Target_right)
{
if(Yaw1 < Target_right)
{
Motor3_forward(1499);
Motor4_reverse(8499);
}
else
{
Move_stop();
}
}
void turn_back(float Yaw1,float Target_right)
{
if((Yaw1 < Target_right)&&(Yaw1 > 0))
{
Motor3_forward(1499);
Motor4_reverse(8499);
}
else if((Yaw1 > Target_right)||(Yaw1 < 0))
{
Move_stop();
}
}