前言
学习笔记,仅供学习,不做商用,如有侵权,联系我删除即可
一、主要目标
1. 理解单目SLAM中稠密深度估计的原理。
2. 通过实验了解单目稠密重建的过程。
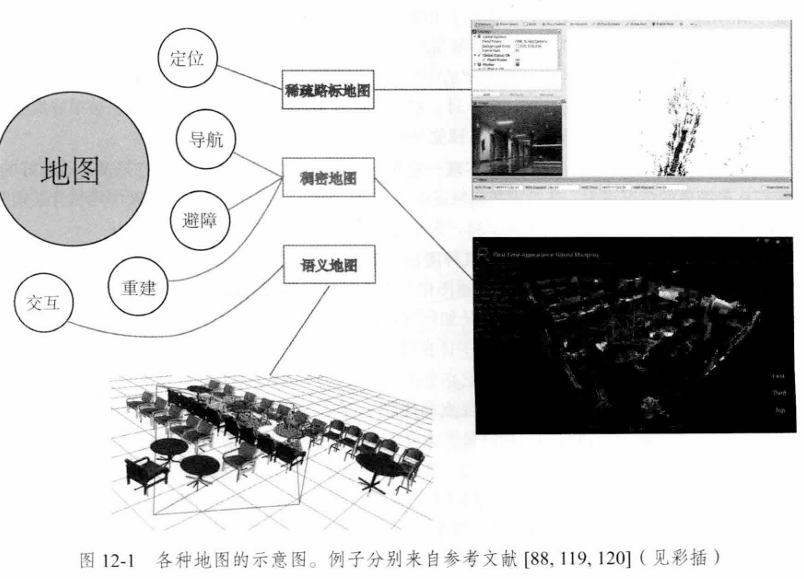
3. 了解几种RGB-D重建中的地图形式。
构建的地图也有多种功能分类:
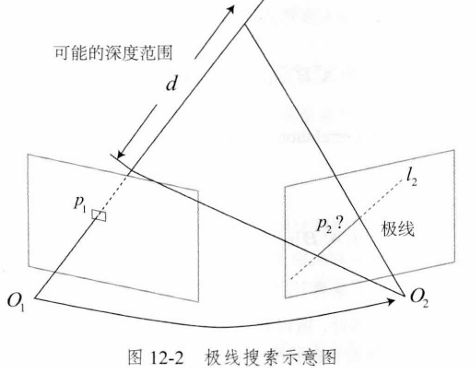
二、单目稠密重建
使用极限搜索和块匹配技术
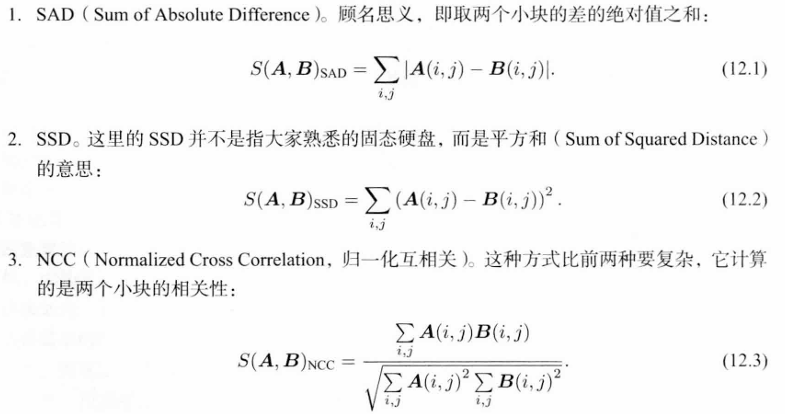
有多种计算方法,其中常用的算法是NCC:


学习笔记,仅供学习,不做商用,如有侵权,联系我删除即可
1. 理解单目SLAM中稠密深度估计的原理。
2. 通过实验了解单目稠密重建的过程。
3. 了解几种RGB-D重建中的地图形式。
构建的地图也有多种功能分类:
使用极限搜索和块匹配技术
有多种计算方法,其中常用的算法是NCC:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1797460.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!




![[office] 如何才能用EXCEL打开dat文件- #微信#学习方法](https://img-blog.csdnimg.cn/img_convert/672e8054a6939b300743000bc8182308.png)