基于python语言,实现经典蚁群算法(ACO)对车辆路径规划问题(CVRP)进行求解, 优化代码结构,改进Split函数
目录
- 往期优质资源
- 1. 适用场景
- 2. 改进效果对比
- 2.1实验结果
- 2.2 改进前后算法性能对比
- 3. 求解结果
- 4. 改进内容
- 5. 部分代码
- 6. 完整代码
- 参考
往期优质资源
-
CVRP系列
-
遗传算法
蚁群算法
禁忌搜索算法
模拟退火算法
自适应大邻域算法
粒子群算法
量子粒子群算法
差分进化算法
MDVRP系列
-
遗传算法
蚁群算法
禁忌搜索算法
模拟退火算法
自适应大邻域算法
粒子群算法
量子粒子群算法
差分进化算法
VRPTW系列
-
遗传算法
蚁群算法
禁忌搜索算法
模拟退火算法
自适应大邻域算法
粒子群算法
量子粒子群算法
差分进化算法
HVRP系列
-
遗传算法
蚁群算法
禁忌搜索算法
模拟退火算法
自适应大邻域算法
粒子群算法
量子粒子群算法
差分进化算法
MDHFVRPTW系列
-
遗传算法
蚁群算法
禁忌搜索算法
模拟退火算法
自适应大邻域算法
粒子群算法
量子粒子群算法
差分进化算法
1. 适用场景
- 求解CVRP
- 车辆类型单一
- 车辆容量不小于需求节点最大需求
- 单一车辆基地
2. 改进效果对比
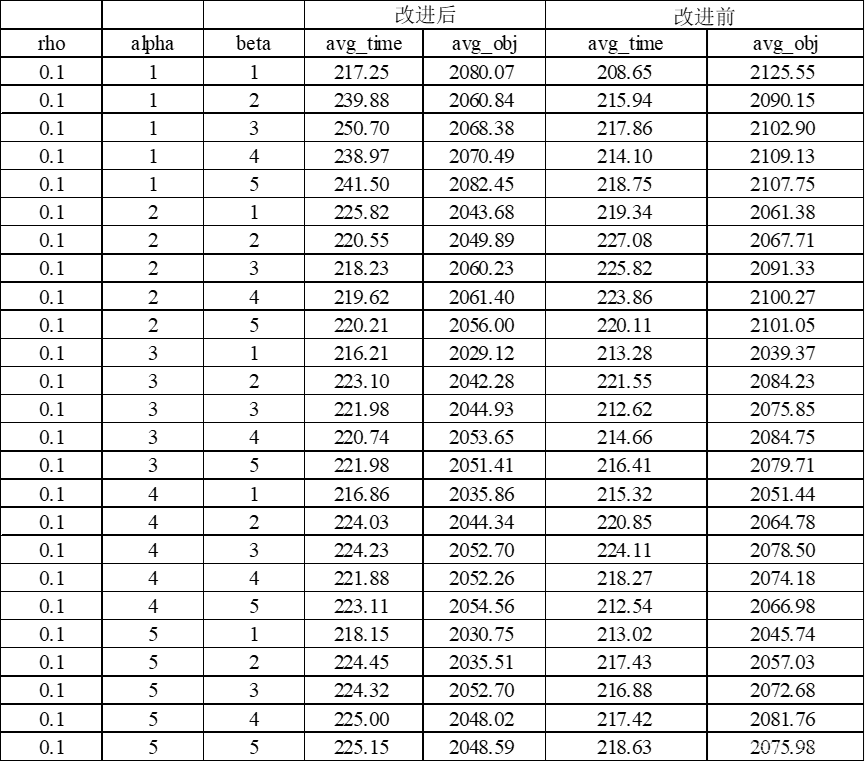
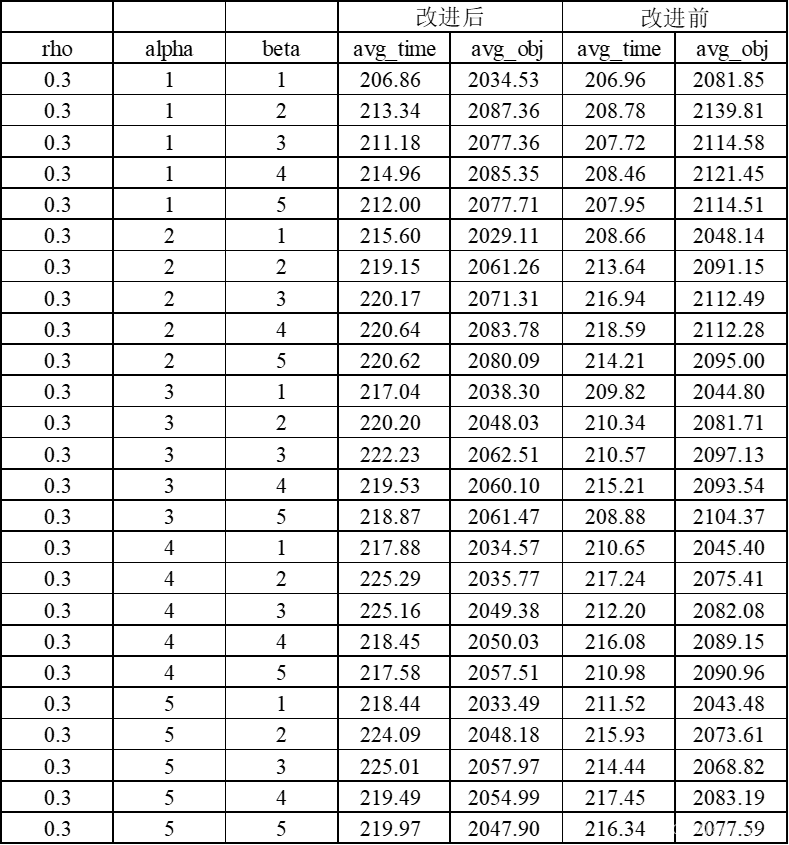
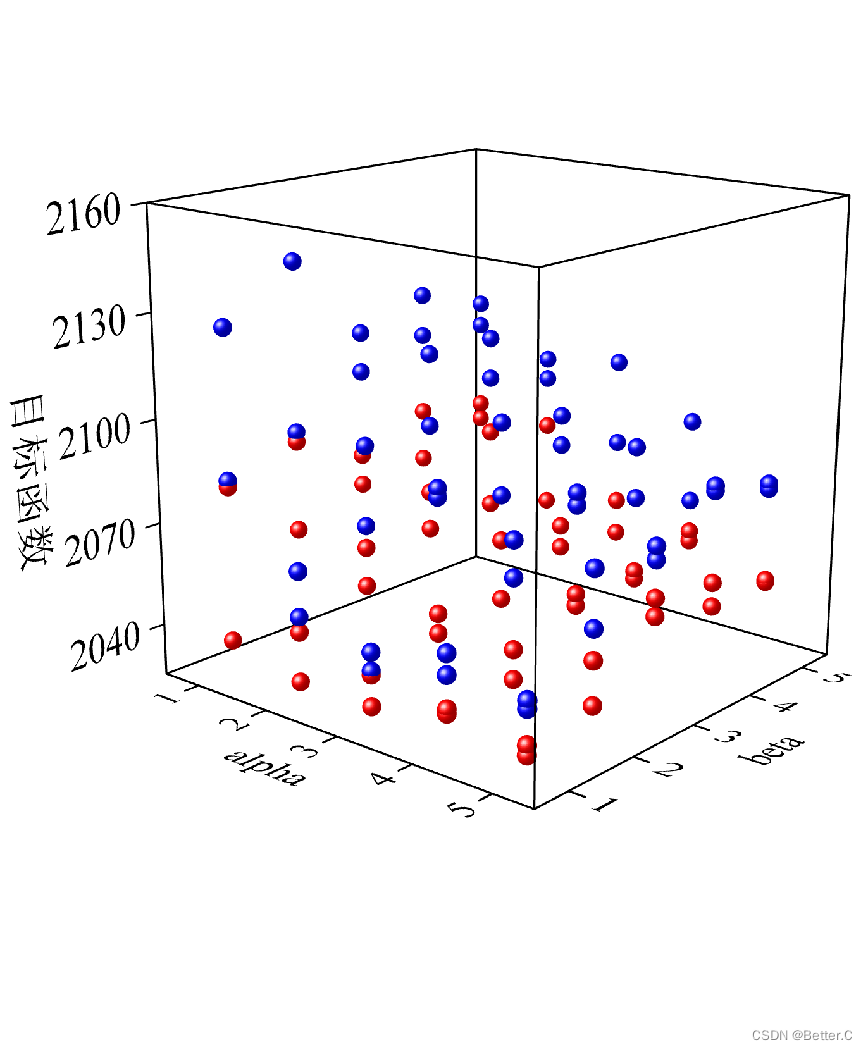
这里做了简单的参数敏感性分析,比较不同参数组合下两个版本code的最优值与求解时间的差异。具体为:1)设定信息素挥发因子为0.1,0.3三个不同等级;2)设定信息启发式因子为1,2,3,4,5不同值;3)设定期望启发式因子为1,2,3,4,5不同值,其他参数固定不变:最大迭代次数为300,车辆容量为80。
2.1实验结果
rho=0.1:
rho=0.3:
2.2 改进前后算法性能对比
求解时间对比(红色为改进后,蓝色为改进前):
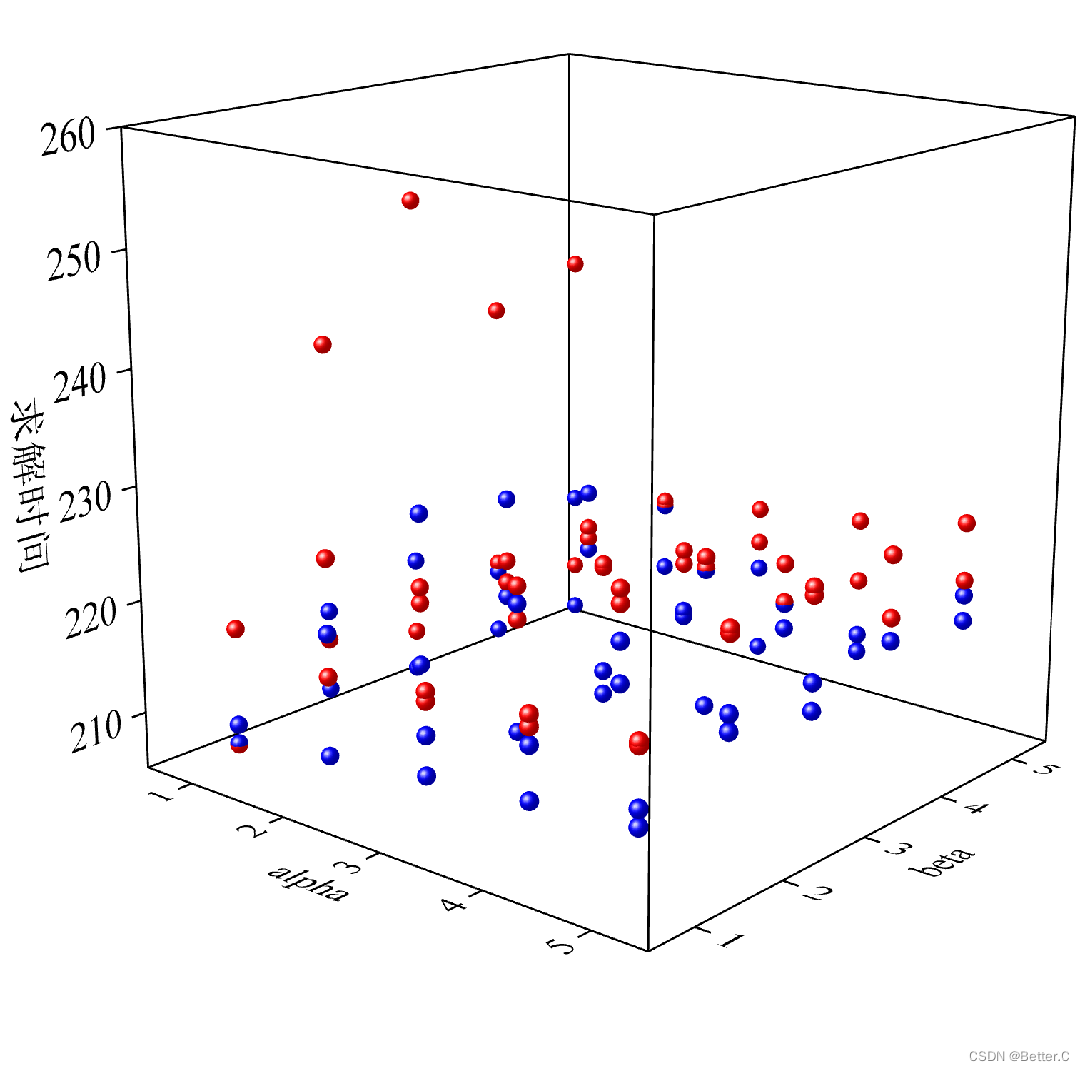
行驶距离对比(红色为改进后,蓝色为改进前):
可以直观看出,改进后算法求解时间略有增加, 平均增加3.10%,目标函数平均优化1.38%。
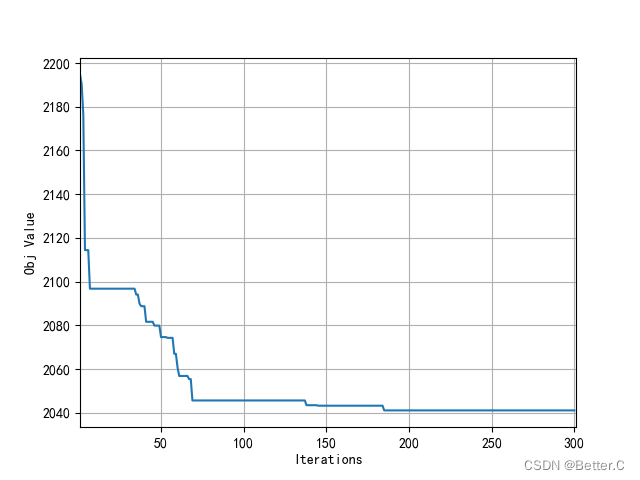
3. 求解结果
(1)收敛曲线
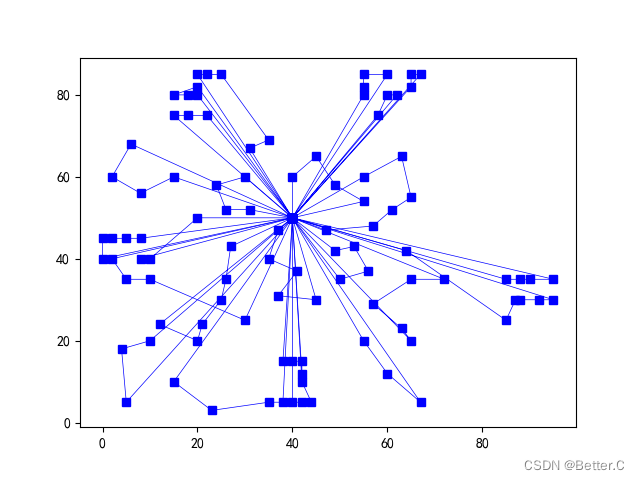
(2)车辆路径
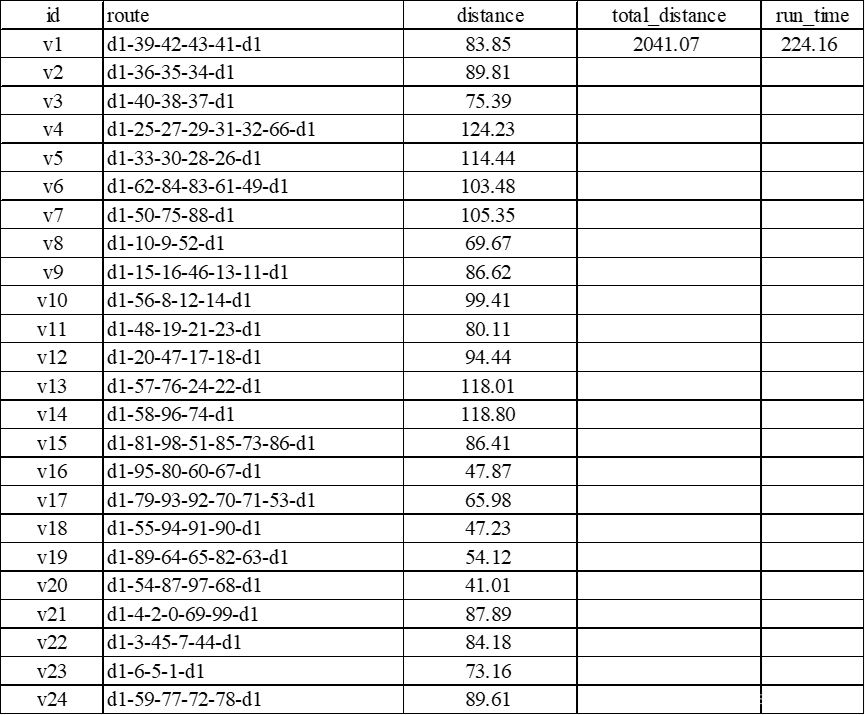
(3)输出文件
4. 改进内容
本期代码在前期代码的基础上做了以下改进:
- 增加距离矩阵,减少代码中重复计算节点间距离代码
- 引入文献中基于图论的Split方法,在给定节点id序列时,可求得最优分割方案
除了以上关键改动之外,还对代码做了细小调整。
5. 部分代码
(1)数据结构
# 数据结构:解
class Sol():
def __init__(self):
self.node_no_seq=None # 解的编码
self.obj=None # 目标函数
self.action_id=None # 算子id
self.route_list=None # 解的解码
self.route_distance = None # 车辆路径的长度集合
# 数据结构:网络节点
class Demand():
def __init__(self):
self.id = 0 # 节点id
self.x_coord = 0 # 节点平面横坐标
self.y_coord = 0 # 节点平面纵坐标
self.demand = 0 # 节点需求
# 数据结构:全局参数
class Model():
def __init__(self):
self.best_sol = None # 全局最优解
self.demand_dict = {} # 需求节点集合
self.demand_id_list = []
self.sol_list = [] # 解的集合
self.depot = None # 车场节点
self.number_of_nodes = 0 # 需求节点数量
self.vehicle_cap = 80 # 车辆最大容量
self.distance_matrix = {}
self.popsize = 100 # 种群规模
self.alpha = 2 # 信息启发式因子
self.beta = 3 # 期望启发式因子
self.Q = 100 # 信息素总量
self.rho = 0.5 # 信息素挥发因子
self.tau = {} # 弧信息素集合
self.vehicle_cap=0 # 车辆最大容量
(2)距离矩阵
def calDistanceMatrix(model):
for i in range(len(model.demand_id_list)):
f_n = model.demand_id_list[i]
for j in range(i + 1, len(model.demand_id_list)):
t_n = model.demand_id_list[j]
dist = math.sqrt((model.demand_dict[f_n].x_coord - model.demand_dict[t_n].x_coord) ** 2
+ (model.demand_dict[f_n].y_coord - model.demand_dict[t_n].y_coord) ** 2)
model.distance_matrix[f_n, t_n] = dist
model.distance_matrix[t_n, f_n] = dist
model.tau[f_n, t_n] = 100
model.tau[t_n, f_n] = 100
dist = math.sqrt((model.demand_dict[f_n].x_coord - model.depot.x_coord) ** 2
+ (model.demand_dict[f_n].y_coord - model.depot.y_coord) ** 2)
model.distance_matrix[f_n, model.depot.id] = dist
model.distance_matrix[model.depot.id, f_n] = dist
(3)路径提取
def extractRoutes(node_no_seq,P,depot_id):
route_list = []
route = []
p = P[node_no_seq[0]]
for node_seq in node_no_seq:
if P[node_seq] == p:
route.append(node_seq)
else:
route.insert(0,depot_id)
route.append(depot_id)
route_list.append(route)
route = [node_seq]
p = P[node_seq]
return route_list
(4)蚁群移动
# 蚂蚁移动
def movePosition(model):
sol_list=[]
local_sol=Sol()
local_sol.obj=float('inf')
for _ in range(model.popsize):
#随机初始化蚂蚁为止
node_no_seq=[random.randint(0,len(model.demand_id_list)-1)]
all_node_no_seq=copy.deepcopy(model.demand_id_list)
all_node_no_seq.remove(node_no_seq[-1])
#确定下一个访问节点
while len(all_node_no_seq)>0:
next_node_no=searchNextNode(model,node_no_seq[-1],all_node_no_seq)
node_no_seq.append(next_node_no)
all_node_no_seq.remove(next_node_no)
sol=Sol()
sol.node_no_seq=node_no_seq
sol.obj,sol.route_list,sol.route_distance=calObj(node_no_seq,model)
sol_list.append(sol)
if sol.obj < local_sol.obj:
local_sol = copy.deepcopy(sol)
model.sol_list=copy.deepcopy(sol_list)
if local_sol.obj<model.best_sol.obj:
model.best_sol=copy.deepcopy(local_sol)
# 搜索下一移动节点
def searchNextNode(model,current_node_no,SE_List):
if len(SE_List) == 1:
return SE_List[0]
prob=np.zeros(len(SE_List))
for i,node_no in enumerate(SE_List):
eta=1/model.distance_matrix[current_node_no,node_no]
tau=model.tau[current_node_no,node_no]
prob[i]=((eta**model.alpha)*(tau**model.beta))
#采用轮盘法选择下一个访问节点
cumsumprob=(prob/sum(prob)).cumsum()
cumsumprob -= np.random.rand()
return SE_List[list(cumsumprob > 0).index(True)]
(5)收敛曲线
# 绘制目标函数收敛曲线
def plotObj(obj_list):
plt.rcParams['font.sans-serif'] = ['SimHei'] #show chinese
plt.rcParams['axes.unicode_minus'] = False # Show minus sign
plt.plot(np.arange(1,len(obj_list)+1),obj_list)
plt.xlabel('Iterations')
plt.ylabel('Obj Value')
plt.grid()
plt.xlim(1,len(obj_list)+1)
plt.show()
(6)车辆路径
# 绘制优化车辆路径
def plotRoutes(model):
for route in model.best_sol.route_list:
x_coord=[]
y_coord=[]
for node_no in route:
x_coord.append(model.demand_dict[node_no].x_coord)
y_coord.append(model.demand_dict[node_no].y_coord)
plt.plot(x_coord,y_coord,marker='s',color='b',linewidth=0.5)
plt.show()
(7)输出结果
# 输出结果
def outPut(model):
work=xlsxwriter.Workbook('result.xlsx')
worksheet=work.add_worksheet()
worksheet.write(0, 0, 'id')
worksheet.write(0, 1, 'route')
worksheet.write(0, 2, 'distance')
worksheet.write(0, 3, 'total_distance')
worksheet.write(1,3,model.best_sol.obj)
for id,route in enumerate(model.best_sol.route_list):
r=[str(i)for i in route]
worksheet.write(id + 1, 0, f'v{str(id + 1)}')
worksheet.write(id + 1, 1, '-'.join(r))
worksheet.write(id + 1, 2, model.best_sol.route_distance[id])
work.close()
6. 完整代码
如有错误,欢迎交流。
有偿获取
参考
- A simple and effective evolutionary algorithm for the vehicle routing problem