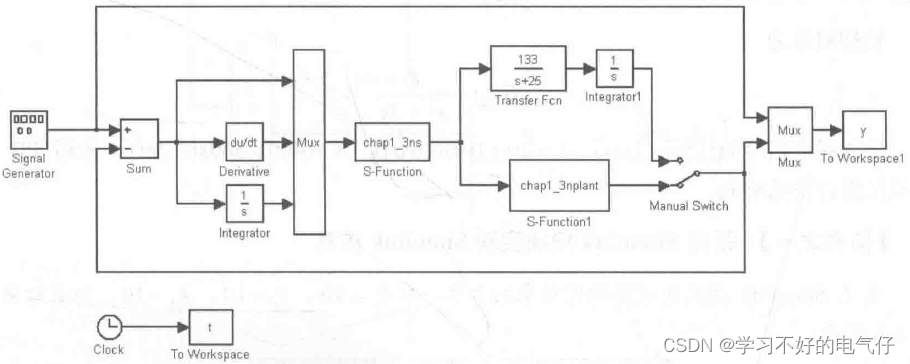
利用简化S函数,实现连续系统PID的Simulink仿真-2中S函数同样的功能。
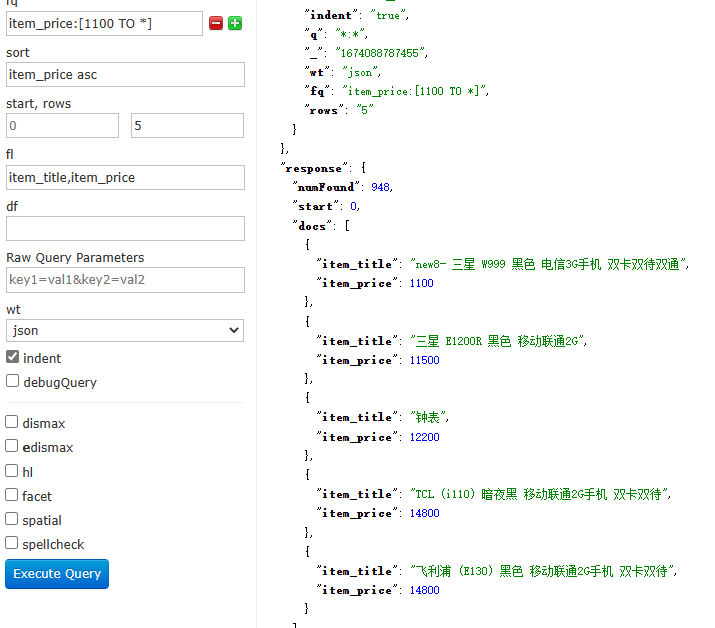
利用S函数简化形式实现被控对象的表达、控制器的设计及仿真结果的输出。在简化S函数中,flag-0时为S函数初始化,其中 sys包括6个参数:第1个参数表示连续系统的阶数;第2个参数表示离散系统的阶数;第3个参数表示S函数的输出个数;第4个参数表示S函数的输入个数;第5个参数表示直接馈通(DirFeedthrough),即输入信号是否在输出端出现的标识,取值为0或1;第6个参数表示模块采样周期的个数,S函数支持多采样周期的系统,x0=[为系统初始值设定; flag=1时为S函数被控对象微分方程的描述;flag=3时为S函数输出。仿真结果如图所示。
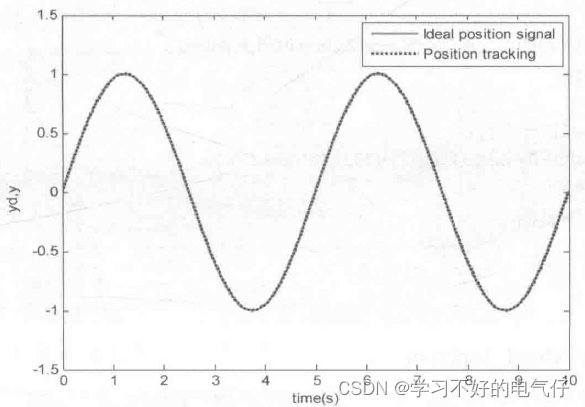
仿真图:
简化的S函数控制器程序:chap1_3ns.m
function [sys,x0]=s_function(t,x,u,flag)
kp=60;
ki=1;
kd=3;
if flag==0
sys=[0,0.1,3,0,1]; %Outputs=1,Inputs=3,DirFeedthrough=0;
x0=[ ];
clseif flag==3
sys(1)=kp*u(1)+ki*u(2)+kd*u(3);
else
sys=[];
end
简化的S函数被控对象程序:chap1_3nplant.m
function [sys,x0]=s_function(t,x,u,flag)
if flag==0
sys=[2,0,1,1,0,0]; %ContStates=2,Outputs=1,Inputs=l
x0=[0.0];
elseif flag==1
sys(1)=x(2)
sys(2)=-(25+10*rands(1))*x(2)+(133+30*rands(1))*u;
elseif flag==3
sys(1)=x(1);
else
sys=[ ];
end
作图程序:chap1_3nplot.m
close all;
plot(t,y(:,1).'r',ty(:,2),'k:','linewidth' ,2);
xlabel( 'time(s)');ylabel('yd,y');
legend('ldeal position signal','Position tracking');