主要内容
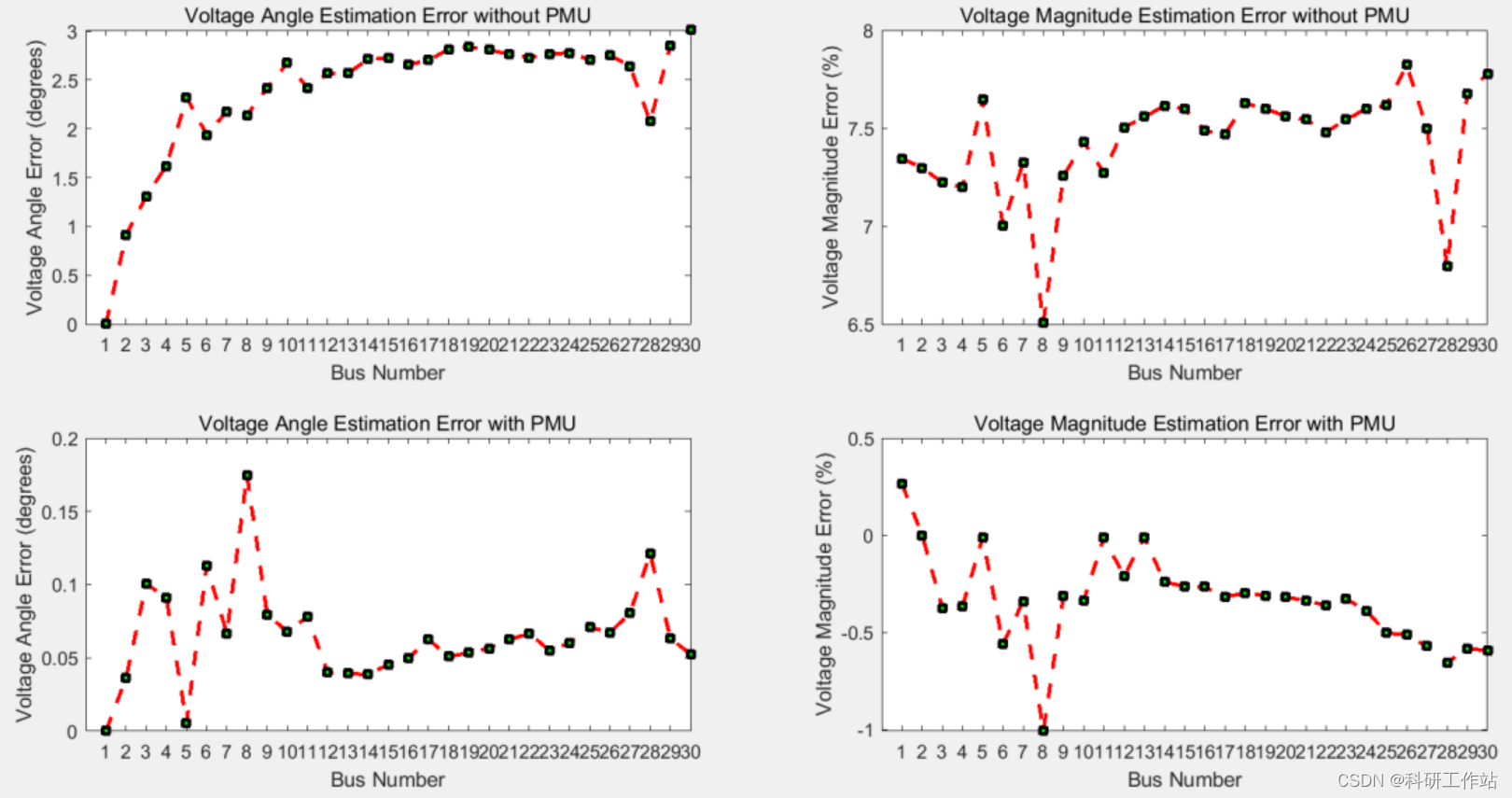
程序采用三种方法对14节点和30节点电力系统状态进行评估:
①PMU同步相量测量单元结合加权最小二乘法(WLS)分析电力系统的电压幅值和相角状态;
②并采用牛顿-拉夫逊方法进行系统潮流计算,结果作为理论分析结论;
③仅采用WLS方法对系统状态进行评估分析。
在上述方法分析的基础上得出第一种方法的误差较第三种方法有明显优势。
该程序为模块化编程,基本全部调整成中文注释,方便学习和理解!
PMU原理
PMU是一种高频测量单元,对系统电力量信息的测量可以高达几千赫兹,PMU将测量得到的信息以超高的传播速度向主站WAMS发送,这些信息借助于GPS实时授权具有同步时钟信号,在传送完成后,WAMS可以将这些信息调整为同一时间计量点,即实现了同步测量的目的。当然,在信号测量和传输过程中也会有滤波和数据转换等步骤。
部分代码
% 基于加权最小二乘法的电力系统状态估计function [E2, W1]= wls(num)%num = 14;ybus = ybusppg(num); %获取节点导纳矩阵zdata = zdatas(num); % 获取节点阻抗矩阵bpq = bbusppg(num); % 电纳nbus = max(max(zdata(:,4)),max(zdata(:,5))); % 节点数量type = zdata(:,2); % 测量类型, Vi - 1, Pi - 2, Qi - 3, Pij - 4, Qij - 5, Iij - 6..z = zdata(:,3); % 测量值fbus = zdata(:,4); % 起始节点tbus = zdata(:,5); % 终止节点Ri = diag(zdata(:,6)); % 测量误差V = ones(nbus,1); % 初始电压值del = zeros(nbus,1); %初始化电压相角E = [del(2:end); V]; % 电压状态向量G = real(ybus);B = imag(ybus);vi = find(type == 1); % 电压测量结果ppi = find(type == 2);qi = find(type == 3);pf = find(type == 4);qf = find(type == 5);nvi = length(vi); % 电压测量数量
结果一览
14节点系统
30节点系统