我们上期提到了二叉搜索树,只是简单的讲了一下原理,那么今天我们就讲一下AVL树。
目录
- AVL树的概念
- AVL树的实现
- AVL树的架构
- insert插入
- 引用pair对象
- 引进parent指针
- 仅插入数据
- 调节平衡因子
- 情况1:插入在父亲的右边,父亲的平衡因子++后为0
- 情况2:插入在父亲的左边,父亲的平衡因子--后为0
- 情况3:插入左或者右,恰巧父亲不是0,是-1/1
- 情况4:当父亲的平衡因子==-2/2,不需要在更新了,证明不平衡了,需要旋转。
- 左边高,右旋
- 右边高,左旋
- 双旋转
- 右左旋转:先右旋然后左旋。
- 左右双旋:先左旋,在右旋。
- 中序遍历
- 判断是否平衡
- AVL树整体代码
AVL树的概念
其实大家应该很奇怪,难道二叉搜索树不能存储数据吗?为什么要有AVL树呢?二叉搜索树有可能会有畸形的情况。像下图,数据比较分散的话,这棵树很正常,如果我们插入的数相对有序就会变成右边那样畸形的树。
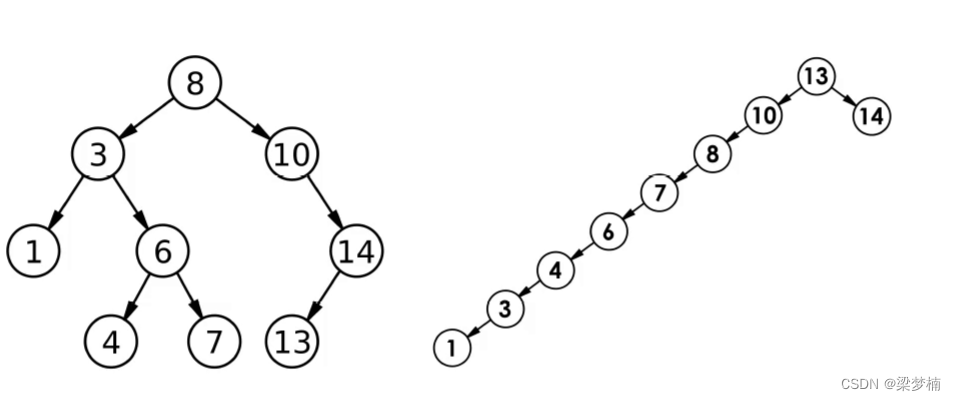
这个时候就需要人工干预,这里的AVL数就可以更好的控制这个情况,它有自己的平衡规则:左右子树高度之差(平衡因子)绝对不超过1(-1,0,1)。如果不满足这个规则,那么我们就旋转。
AVL树的实现
因为AVL树也是二叉搜索树的一种,所以他也要满足二叉搜索树的条件,然后在满足他自己的平衡规则。
AVL树的架构
其实数的节点架构和整体架构并没有变,只是多了一个bf(平衡因子),用来调节平衡。
struct AVLTreeNode
{
AVLTreeNode(const pair<K, V> kv)
:_left(nullptr)
,_right(nullptr)
,_parent(nullptr)
,_kv(kv)
,_bf(0)
{}
AVLTreeNode* _left;
AVLTreeNode* _right;
AVLTreeNode* _parent;
pair<K, V> _kv;
int _bf;
};
template<class K,class V>
class AVLTree
{
public:
typedef AVLTreeNode<K,V> Node;
private:
Node* _root=nullptr;
}
insert插入
引用pair对象
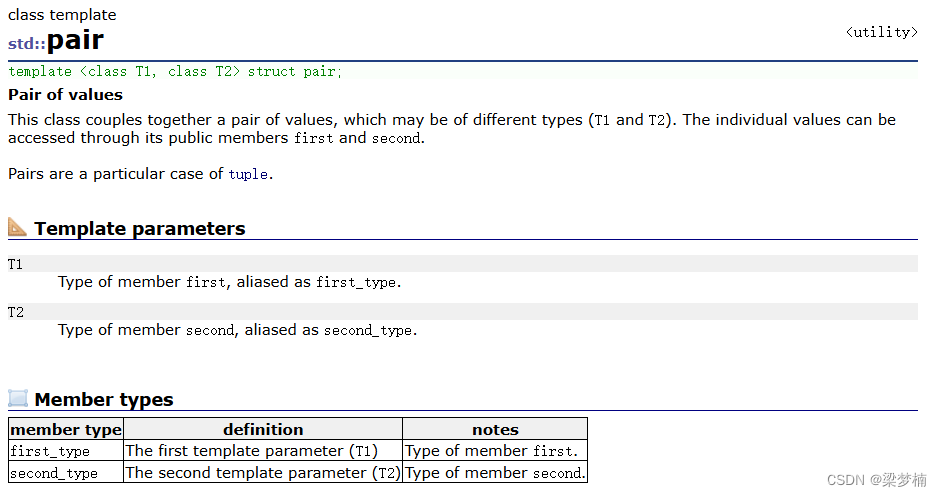
这里与原来不同,这里我们引入了一个pair对象,那么pair是什么?我们用pair来实现KV结构,在库中的map也是用pair也完成KV结构的,所以这里我们就用这pair。pair对象的first是K值,second是V值。
引进parent指针
这里引用父指针是因为我们将来要旋转,要不断向上调节平衡因子,因为当我们插入某个值有可能引起平衡因子失衡。
仅插入数据
其实插入部分和我们之前写的一样,只不过要注意的是,我们的值存的是pair对象,要像拿到K值需要 _kv.first拿到K值。一定要遵循二叉搜索树的规律,左子树比根小,右子树比根大。
if (_root == nullptr)
{
//插入第一个值
Node* newNode = new Node(kv);
_root = newNode;
return true;
}
Node* newNode = new Node(kv);
Node* cur = _root;
Node* parent = cur;
while (cur)
{
if (cur->_kv.first < newNode->_kv.first)
{
//大于在右边
parent = cur;
cur = cur->_right;
}
else if (cur->_kv.first > newNode->_kv.first)
{
//小于在左边
parent = cur;
cur = cur->_left;
}
else
{
//等于,二叉搜索树不允许冗余,所以直接返回false。
return false;
}
}
if (parent->_kv.first > newNode->_kv.first)
{
//在左边
parent->_left = newNode;
}
else
{
//在右边
parent->_right = newNode;
}
newNode->_parent = parent;
调节平衡因子
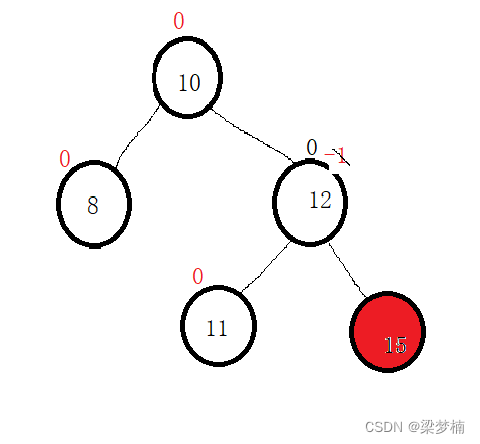
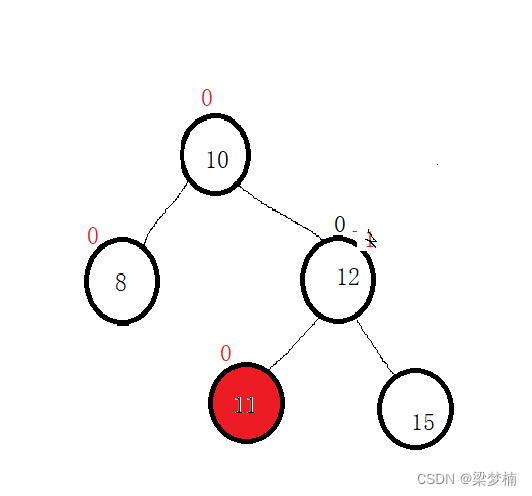
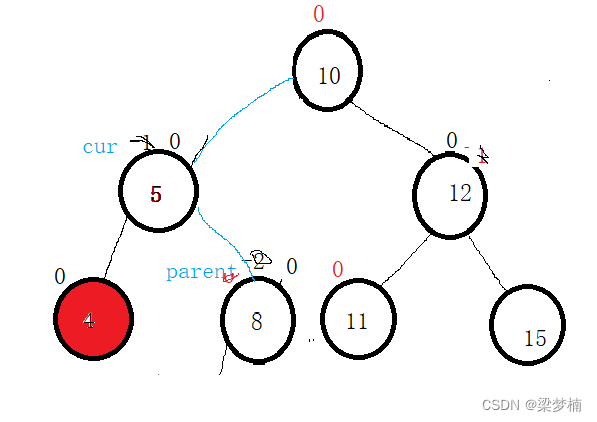
情况1:插入在父亲的右边,父亲的平衡因子++后为0
红色是我插入的数,插入后,它的parent:12从-1加加后变成了0,我们还需要向上更新吗?答案是不需要向上更新,为什么?0表示左右子树的高度差为0,也就说高度没有变,所以我不需要再向上更新。
解释:平衡因子原来是1/-1都表示这个树缺了一个节点,当我们插入之后正好填上了这个节点,但是高度并不变。看图!我把15插入,右子树这个高度没有变。
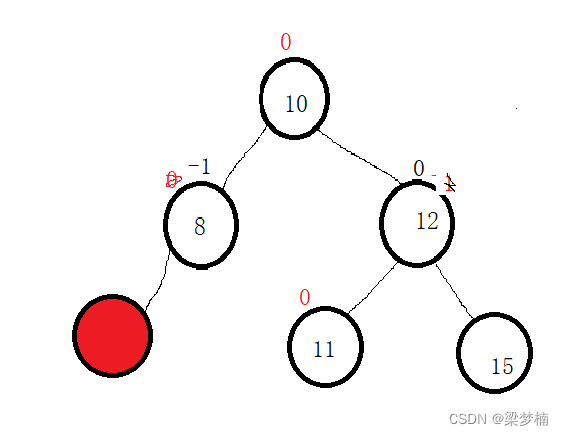
情况2:插入在父亲的左边,父亲的平衡因子–后为0
当我插入在左边,那我们就需要给父亲的因子bf–。
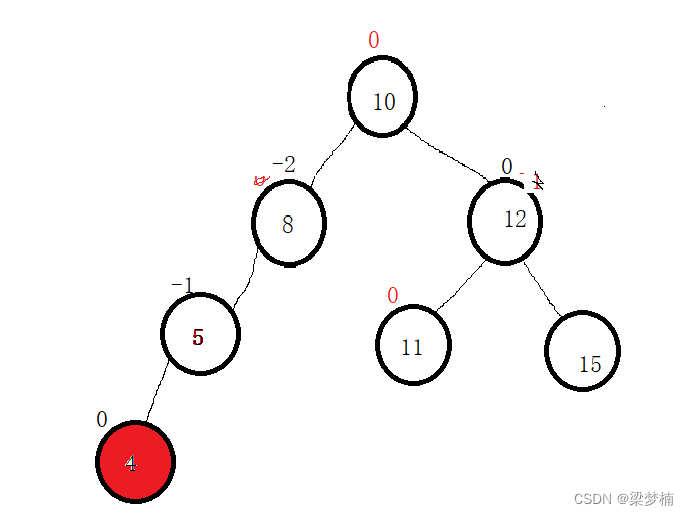
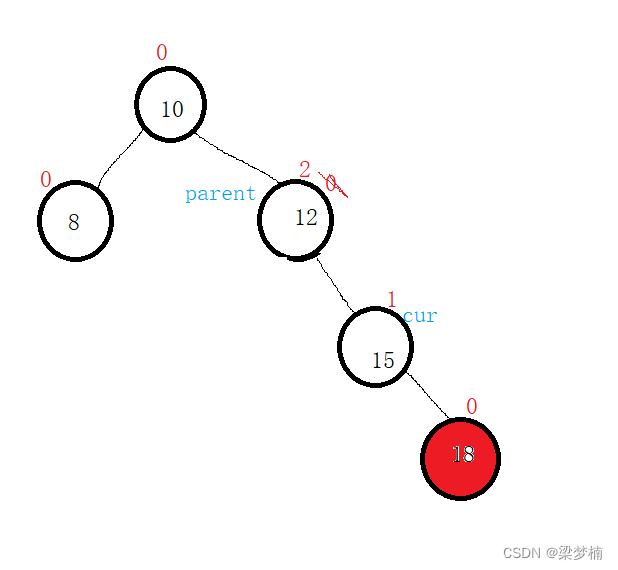
情况3:插入左或者右,恰巧父亲不是0,是-1/1
父亲的平衡因子==1/-1,父亲所在子树高度变了。高度变了继续向上更新。
情况4:当父亲的平衡因子==-2/2,不需要在更新了,证明不平衡了,需要旋转。
这个时候就不满足AVL树的规则了,就需要旋转。
左边高,右旋
这个树就是左边高的情况,你会发现parent为-2,cur为-1,这个情况就是左边比右边要高,那么我们需要右旋。
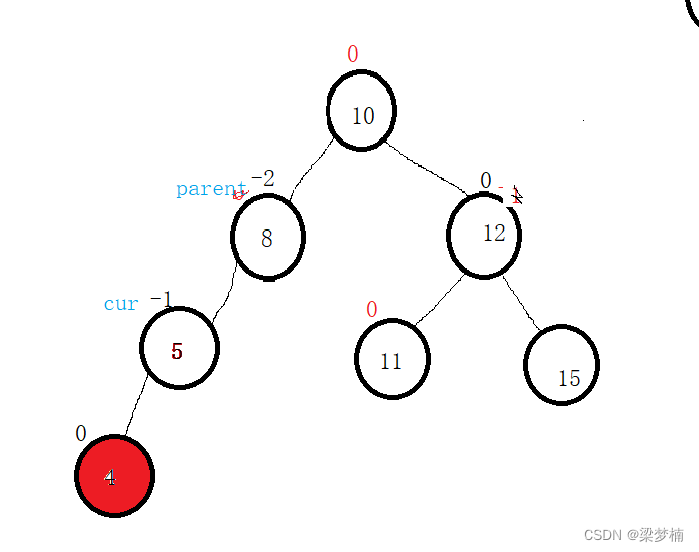
右旋的口诀:把cur的右边给parent的左边,cur的右边链接parent,在让parent的parent链接cur。会发现我们把原来的parent变成了cur的右边。并且现在是平衡的。
其实为什么要把cur的右边给parent呢?是因为cur的右边时当前树最大的值,cur给了parent链接到左边,依然不会破坏二叉搜索树的规则。
void RotateR(Node* parent )
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
if (subLR)
subLR->_parent = parent;
subL->_right = parent;
Node* ppNode = parent->_parent;
parent->_parent = subL;
if (parent == _root)
{
_root = subL;
subL->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subL;
}
else
{
ppNode->_right = subL;
}
subL->_parent = ppNode;
}
parent->_bf = subL->_bf = 0;
}
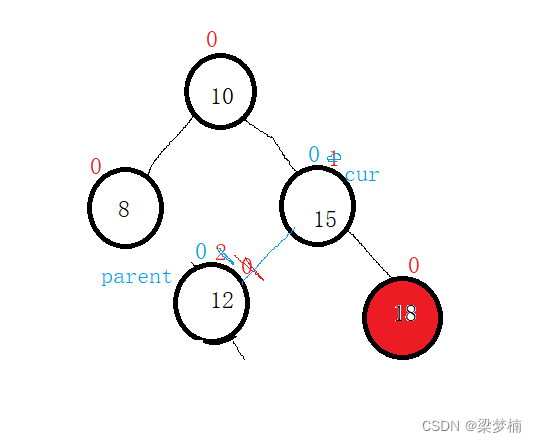
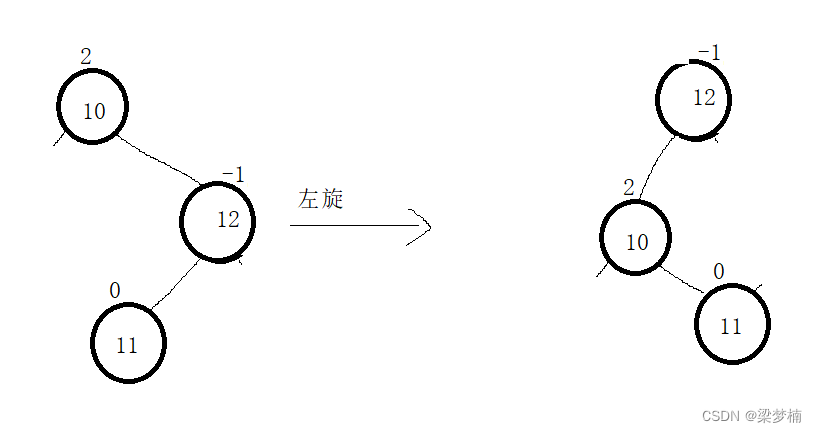
右边高,左旋
当我们插入红色节点的时候就会导致右边过高,那么我们就需要左旋。
左旋的口诀:让cur的左边给parent的右边链接,然后让父亲变成cur的左边。
解释:为什么要把cur左边的值给parent的右边?cur当前位置是parent的右边,cur的左边也是比parent大的值,给parent的右边依然不影响二叉搜索树的规则。
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
if(subRL)
subRL->_parent = parent;
subR->_left = parent;
Node* pphead = parent->_parent;
parent->_parent = subR;
if (parent == _root)
{
_root = subR;
subR->_parent = nullptr;
}
else
{
if (pphead->_parent == parent)
{
pphead->_right = subR;
}
else
{
pphead->_left = subR;
}
subR->_parent = pphead;
}
subR->_bf = parent->_bf = 0;
}
双旋转
还有一种情况,它并不是单纯的一边高,用单旋并不能解决问题。当我们仅仅只是单旋会发现他有变成了形态不同,但是问题一样的情况,这个时候就需要双旋。
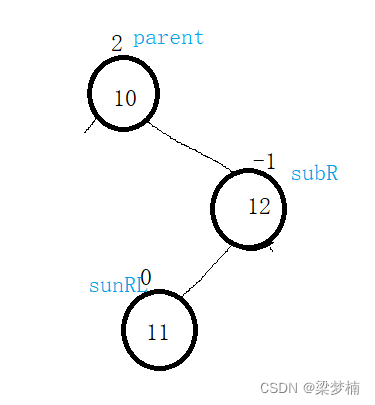
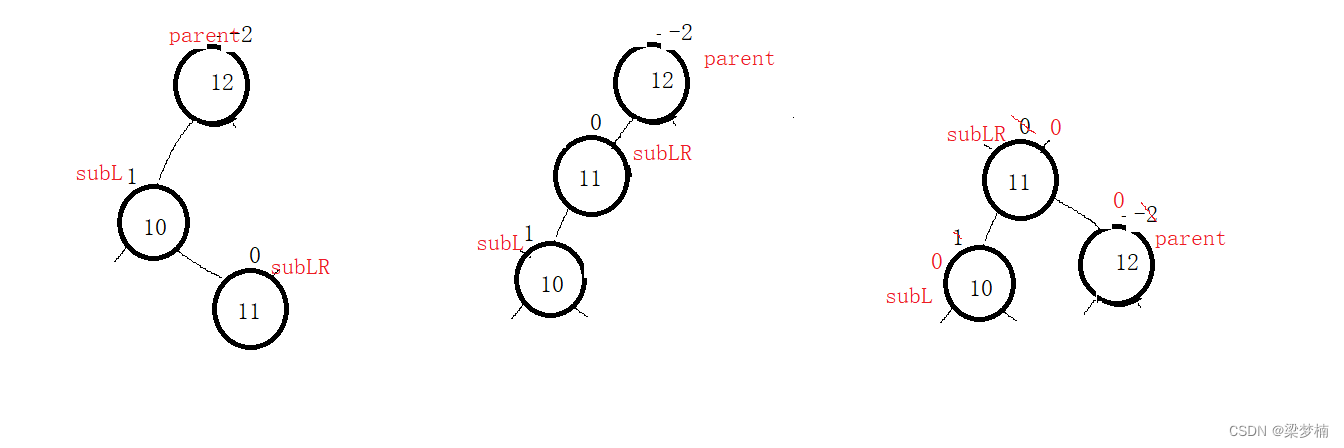
右左旋转:先右旋然后左旋。
既然我们单旋解决不了问题,我们可以把他变成一边高,然后进行单旋。
如这个图,我们可以对subR进行右旋后,在对parent左旋就可以了。
右左双旋后:
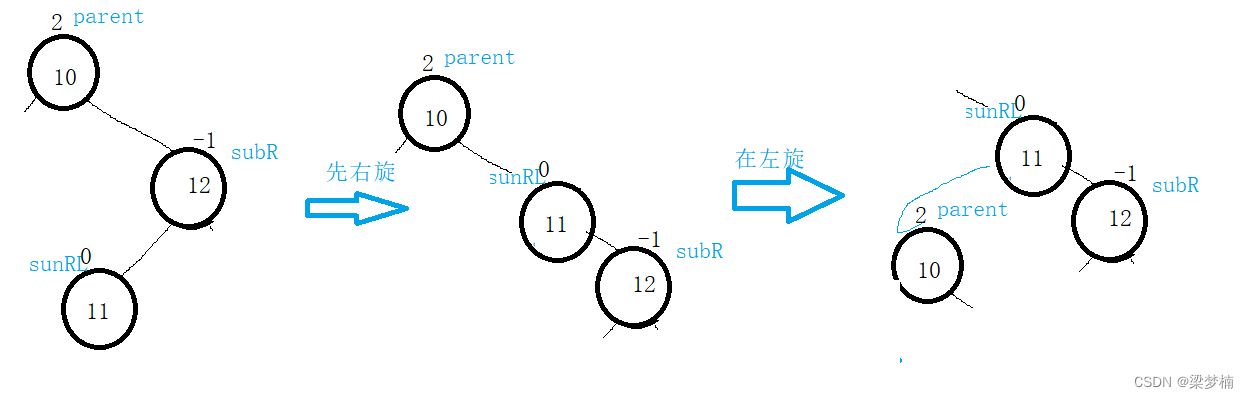
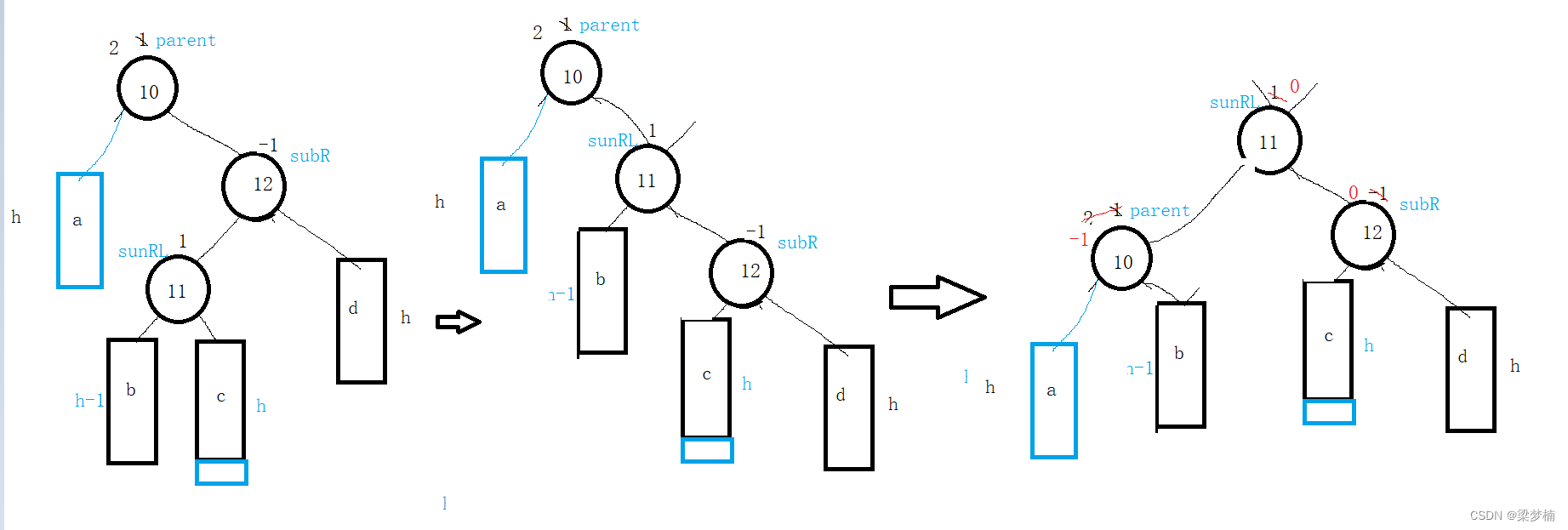
但是有个问题,平衡因子我们应该如何更新?你可能会说这种情况不是正好满足左旋/右旋后平衡因子变成0吗?但是如果其他位置都有节点呢?接下来我们抽象图,给大家演示一下。
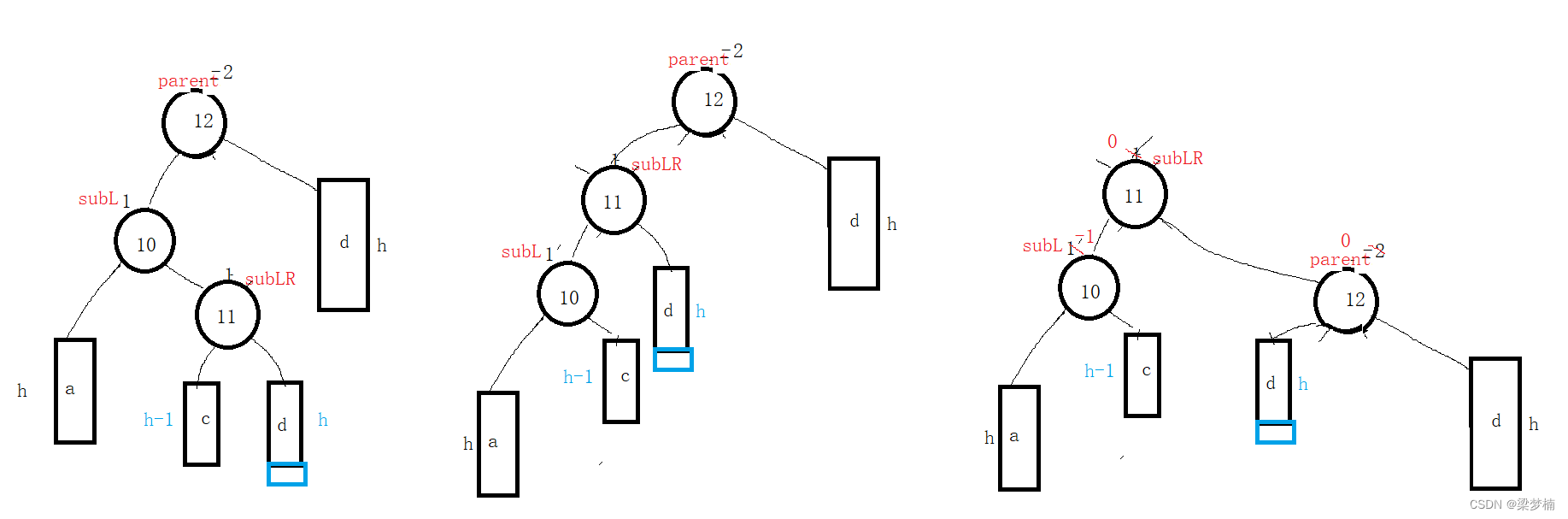
当我们插入节点的位置不同,你会发现每一个平衡因子也不一样。如图:我插在了右边。这个时候我通过右左双旋就会得到下图。如最右图的红色平衡因子,应该变成这个情况。所以说插入的位置不同,平衡因子也会不同。
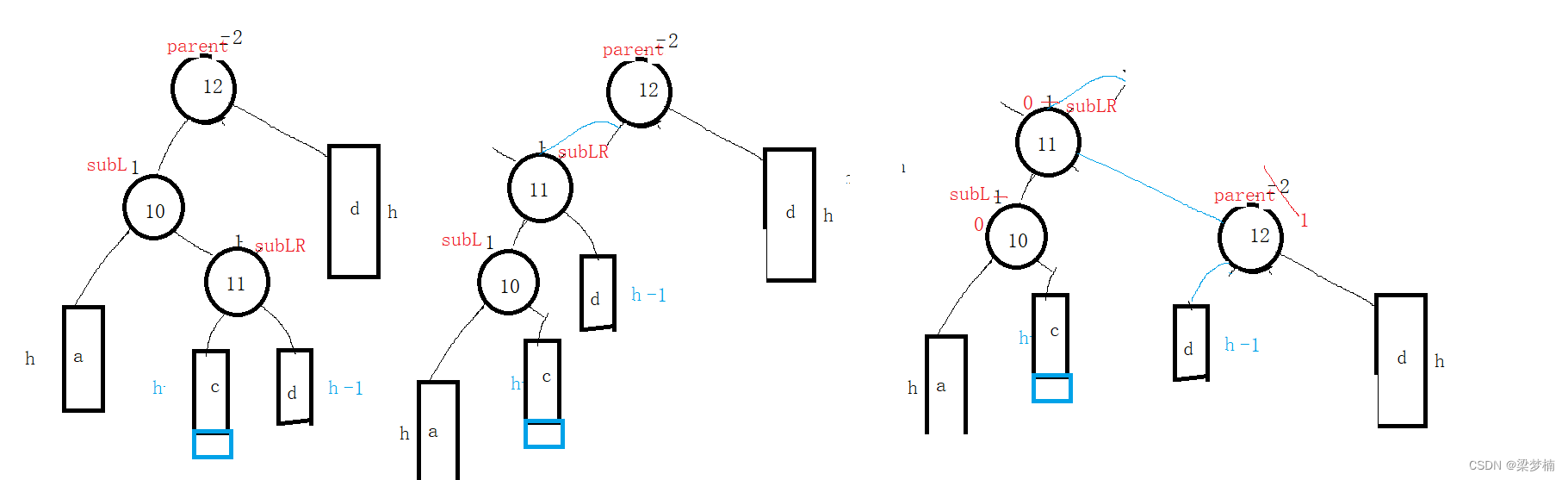
如图:假如我插在了左边。会发现平衡因子又不一样了。所以我们并不能用一个例子来概括所有。
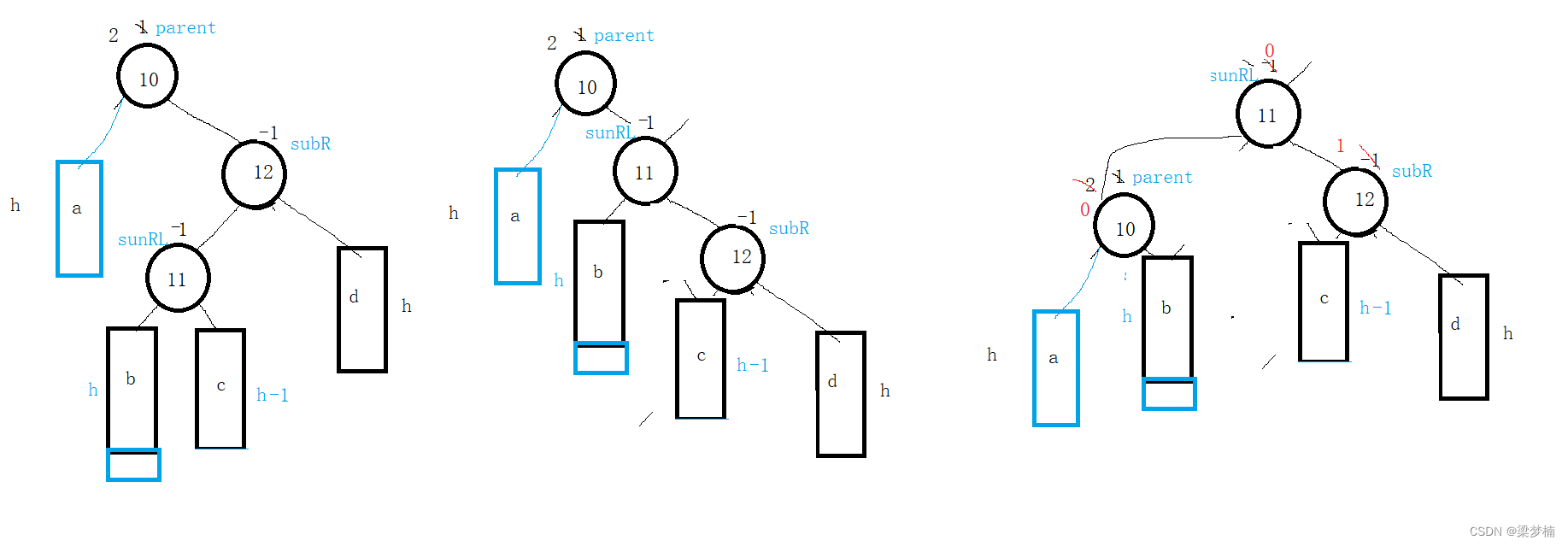
那么我们应该怎么做呢?其实从我们画图,你会发现我们改变的只不过是parent 、subR、sunRL这三个节点的因子,其他的并没有改变。并且,跟subRL的因子有密切关系,所以我们只需要判断subRL的因子是0/1/-1就能修改他们三个因子。
void RotateRL(Node* parent)
{
//右左双旋
//平衡因子需要自己调节
Node* subR = parent->_right;
Node* subRL = subR->_left;
int bf = subRL->_bf;
RotateR(subR);
RotateL(parent);
if (bf == 0)
{
//新插入的
parent->_bf =0;
subR->_bf = 0;
subRL->_bf = 0;
}
else if (bf == 1)
{
//右边插入的
subR->_bf = 0;
subRL->_bf = 0;
parent->_bf = -1;
}
else if(bf==-1)
{
//在左边插入的
parent->_bf = 0;
subR->_bf = 1;
subRL->_bf = 0;
}
else
{
assert(false);
}
}
左右双旋:先左旋,在右旋。
图下是:左右双旋。
当然了,我们依然需要分析平衡因子,所以我们依然要分析插入在哪个位置。
如图:当插入在右边。
如图:当我们插在左边。
void RotateLR(Node* parent)
{
//左右双旋
//平衡因子需要单独调节
Node* subL = parent->_left;
Node* subLR = subL->_right;
int bf = subLR->_bf;
//先左旋在右旋
RotateL(parent->_left);
RotateR(parent);
//重新计算调节因子
if (bf == 0)
{
//当且节点就是新插的
subL->_bf = 0;
parent->_bf = 0;
subLR->_bf = 0;
}
else if(bf==1)
{
//在当前节点的右边插入的
parent->_bf = 0;
subL->_bf = -1;
subLR->_bf = 0;
}
else if(bf == -1)
{
subL->_bf = 0;
parent->_bf = 1;
subLR->_bf = 0;
}
else
{
assert(false);
}
}
中序遍历
因为二叉搜索树我们都是中序遍历,因为中序遍历更接近有序。
void _Inorder(Node* root)
{
if (root == nullptr)
{
return;
}
_Inorder(root->_left);
cout << root->_kv.first << ":" << root->_kv.second<<endl;
_Inorder(root->_right);
}
判断是否平衡
什么时候不平衡?是不是因子大于等于2的时候,所以我们需要算左右树的高度相减,如果超过2,那就是不平衡。
bool _isBalance(Node* root)
{
if (root == nullptr)
{
return true;
}
int left = _Height(root->_left);
int right = _Height(root->_right);
if (abs(left - right) >= 2) return false;//因子大于等于2的时候不平衡
return _isBalance(root->_left) && _isBalance(root->_right);
}
int _Height(Node* root)
{
if (root == nullptr)
return 0;
int left = _Height(root->_left);
int right = _Height(root->_right);
return max(left, right) + 1;
}
AVL树整体代码
以下是整个AVL树所有的代码?
问题:为什么没有像库一样写删除呢?答:我们模拟实现其实是为了了解底层,并不是要超过底层,因为现有的库已经很好了,我们没必要写一个。二叉搜索树很少用删除接口。所以这里没有实现。
#pragma once
#include<iostream>
#include<vector>
#include<string>
#include<assert.h>
using namespace std;
namespace KV
{
template<class K,class V>
struct AVLTreeNode
{
AVLTreeNode(const pair<K, V> kv)
:_left(nullptr)
,_right(nullptr)
,_parent(nullptr)
,_kv(kv)
,_bf(0)
{}
AVLTreeNode* _left;
AVLTreeNode* _right;
AVLTreeNode* _parent;
pair<K, V> _kv;
int _bf;
};
template<class K,class V>
class AVLTree
{
public:
typedef AVLTreeNode<K,V> Node;
bool insert(const pair<K, V> kv)
{
if (_root == nullptr)
{
//插入第一个值
Node* newNode = new Node(kv);
_root = newNode;
return true;
}
Node* newNode = new Node(kv);
Node* cur = _root;
Node* parent = cur;
while (cur)
{
if (cur->_kv.first < newNode->_kv.first)
{
//大于在右边
parent = cur;
cur = cur->_right;
}
else if (cur->_kv.first > newNode->_kv.first)
{
//小于在左边
parent = cur;
cur = cur->_left;
}
else
{
//等于,二叉搜索树不允许冗余,所以直接返回false。
return false;
}
}
if (parent->_kv.first > newNode->_kv.first)
{
//在左边
parent->_left = newNode;
}
else
{
//在右边
parent->_right = newNode;
}
newNode->_parent = parent;
cur = newNode;
while (parent)
{
if (parent->_left == cur)
{
cur->_parent->_bf--;
}
else if (parent->_right == cur)
{
cur->_parent->_bf++;
}
if (parent->_bf == 0)
{
break;
}
else if (parent->_bf == 1 || parent->_bf == -1)
{
cur = parent;
parent = parent->_parent;
}
else if (parent->_bf == 2 || parent->_bf == -2)
{
//出现健康问题需要旋转
//左边高,右旋转
if (parent->_bf == -2 && cur->_bf == -1)
{
RotateR(parent);
}
//右边高,左旋转
else if (parent->_bf == 2 && cur->_bf == 1)
{
RotateL(parent);
}
else if (parent->_bf == -2 && cur->_bf == 1)
{
//左右双旋
RotateLR(parent);
}
else if (parent->_bf == 2 && cur->_bf == -1)
{
//右左双旋
RotateRL(parent);
}
else
{
assert(false);
}
}
else
{
//按道理说不可能有这种情况,但是保不准会有bug
assert(false);
break;
}
}
return true;
}
void Inorder()
{
_Inorder(_root);
}
int Height()
{
return _Height(_root);
}
bool isBalance()
{
return _isBalance(_root);
}
private:
int _Height(Node* root)
{
if (root == nullptr)
return 0;
int left = _Height(root->_left);
int right = _Height(root->_right);
return max(left, right) + 1;
}
bool _isBalance(Node* root)
{
if (root == nullptr)
{
return true;
}
int left = _Height(root->_left);
int right = _Height(root->_right);
if (abs(left - right) >= 2) return false;
return _isBalance(root->_left) && _isBalance(root->_right);
}
void RotateRL(Node* parent)
{
//右左双旋
//平衡因子需要自己调节
Node* subR = parent->_right;
Node* subRL = subR->_left;
int bf = subRL->_bf;
RotateR(subR);
RotateL(parent);
if (bf == 0)
{
//新插入的
parent->_bf =0;
subR->_bf = 0;
subRL->_bf = 0;
}
else if (bf == 1)
{
//右边插入的
subR->_bf = 0;
subRL->_bf = 0;
parent->_bf = -1;
}
else if(bf==-1)
{
//在左边插入的
parent->_bf = 0;
subR->_bf = 1;
subRL->_bf = 0;
}
else
{
assert(false);
}
}
void RotateLR(Node* parent)
{
//左右双旋
//平衡因子需要单独调节
Node* subL = parent->_left;
Node* subLR = subL->_right;
int bf = subLR->_bf;
//先左旋在右旋
RotateL(parent->_left);
RotateR(parent);
//重新计算调节因子
if (bf == 0)
{
//当且节点就是新插的
subL->_bf = 0;
parent->_bf = 0;
subLR->_bf = 0;
}
else if(bf==1)
{
//在当前节点的右边插入的
parent->_bf = 0;
subL->_bf = -1;
subLR->_bf = 0;
}
else if(bf == -1)
{
subL->_bf = 0;
parent->_bf = 1;
subLR->_bf = 0;
}
else
{
assert(false);
}
}
void RotateR(Node* parent )
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
if (subLR)
subLR->_parent = parent;
subL->_right = parent;
Node* ppNode = parent->_parent;
parent->_parent = subL;
if (parent == _root)
{
_root = subL;
subL->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subL;
}
else
{
ppNode->_right = subL;
}
subL->_parent = ppNode;
}
parent->_bf = subL->_bf = 0;
}
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
if(subRL)
subRL->_parent = parent;
subR->_left = parent;
Node* pphead = parent->_parent;
parent->_parent = subR;
if (parent == _root)
{
_root = subR;
subR->_parent = nullptr;
}
else
{
if (pphead->_parent == parent)
{
pphead->_right = subR;
}
else
{
pphead->_left = subR;
}
subR->_parent = pphead;
}
subR->_bf = parent->_bf = 0;
}
void _Inorder(Node* root)
{
if (root == nullptr)
{
return;
}
_Inorder(root->_left);
cout << root->_kv.first << ":" << root->_kv.second<<
" 因子:" <<root->_bf<< endl;
_Inorder(root->_right);
}
Node* _root=nullptr;
};
}




![[LitCTF 2023]yafu (中级) (素数分解)](https://img-blog.csdnimg.cn/direct/71f4ed8317ab4e829f089146738cffe0.png)
![[vue3后台管理二]首页和登录测试](https://img-blog.csdnimg.cn/direct/dba3a7b2120b4b36be69931ff1a413a2.png)