结构光相机国产、非国产统计参数对比分析
1. Kinect v1
Kinect v1深度相机拥有一个RGB彩色摄像头,一个红外线CMOS摄像机和一个红外发射器。相机的红外线CMOS摄像机和红外发射器以左右水平的方式分布。该相机采用的是以结构光为基础进行改进后的光编码(Light Coding)技术获得物体的深度信息。Kinect v1有Moving Touch传动马达电动机用于仰角控制,一般是根据它与用户间的位置、距离调节。Kinect v1如图所示,从左至右分别为红外投影机,颜色摄像机,红外摄像机。

其RGB分辨率为640×480,帧率为30FPS,深度分辨率为320×240,帧率为30FPS,接口为USB2.0接口。
2. Intel RealSense
Intel® RealSense™深度摄像头D415和D435将Intel D4视觉处理器和深度模块集成在外形小巧、功能强大、成本低廉、可立即部署的封装中。Intel® RealSense™ D400系列摄像头设计用于实现轻松设置和便于携带,是将深度感应应用到设备中的开发者、制造者和创新者的理想选择。这些摄像头可捕获室内或室外环境,具有远距离功能以及高达1280x720的深度分辨率(30帧每秒 (fps))。
D415具有标准视野,非常适合3D扫描等高精度应用,这种视野为较小的物体或需要更精确的测量时带来更高的深度分辨率。且D415在深度传感器上设置了卷帘快门,可提供最高的深度质量。此外,D415还集成了RGB传感器,非常适合面部认证、3D扫描或体积捕获。
其物理尺寸为99mmL×20mmW×23mmH,深度测距范围为0.5m-3m,视场角为65°×40°,输出的深度分辨率最高可达1280×720,帧率可达90FPS;

D435i提供Intel® RealSense™所有摄像头中最宽广的视野,深度传感器上的全局快门非常适合快速移动的应用。D435i可为各种应用提供高质量的深度,它的宽视场非常适合机器人或增强和虚拟现实等应用,在这些应用中,尽可能多地看到场景至关重要。这款小型摄像头的射程可达10米,可轻松集成到任何解决方案中,并配有英特尔实感SDK 2.0和跨平台支持。
其物理尺寸为90mmL×25mmW×25mmH,深度测距范围为0.3m-3m,视场角为87°×58°,输出的深度分辨率最高可达1280×720,帧率可达90FPS;RGB分辨率为1920×1080,帧率为30FPS,视场角为69°×42°,接口为USB‑C* 3.1 Gen 1*。

D455是D400系列中的第四款产品,根据 10 多年立体摄像机开发过程中获得的反馈和知识进行设计。D455将深度传感器之间的距离延长至95mm,从而将4m时的深度误差提高到2%以下。为了改善RGB图像以及深度和RGB图像之间的对应关系,RGB传感器包括一个全局快门,并与深度FOV相匹配。且集成了IMU,使应用程序能够在相机移动的任何情况下优化其深度感知。
其物理尺寸为124mmL×26mmW×29mmH,深度测距范围为0.6m-6m,视场角为87°×58°,输出的深度分辨率最高可达1280×720,帧率可达90FPS;RGB分辨率为1280×800,帧率为30FPS,视场角为90°×65°,接口为USB‑C* 3.1 Gen 1*。
3. HP 3D Scanner Pro S3
HP 3D Scanner Pro S3是最新款工业级超高精度结构光3D扫描仪。这款改进的版本用一种更好的处理方式优化了结构光技术,考虑到扫描物体的不同条件和各种尺寸,比以前更容易调整的扫描系统,这款扫描仪是可移动的,可以很轻易的放在被扫描物体前,单击开始扫描,几秒钟后屏幕上就会出现数字化三维模型,并且可以同时捕获到扫描对象的表面纹理,您可以扫描物体的多个面,并随后呈现一个封闭的360度模型,三维模型可以导出标准的3D文件格式(如OBJ,STL和PLY),兼容市面上大多数三维设计软件。
扫描仪类型为白色结构光,扫描尺寸范围为60-500毫米,分辨率/精度约为物体实际尺寸的0.05%(高至0.05mm),扫描时长为单幅扫描2秒(或者最高到10秒,要取决于设置和电脑速度);网格密度为每幅扫描顶点2,300,000,排列拼接可以选配旋转平台全自动拼接、特征重叠区域自动拼接、围绕Y轴旋转角度拼接、指定点区域自动拼接,纹理辅助拼接等;输出文档格式有OBJ,STL,PLY。
其物理尺寸为323×613×209mm,使用结构光,最大分辨率为0.05mm,最大精度为0.05mm,采集速度为2300000points/s,深度范围为0.06-0.5m。

4. PrimeSense
PrimeSense是以色列3d传感器公司,成立于2005年,2006年成功研制出基于结构光原理的3维传感器(这款芯片运用了“光编码”技术去制造场景,并且使用近IR(红外辐射)光线和CMOS(互补金属半导体)传感器去解读场景背后的光代码,最后使用复杂的算法去分析3D数据。),2009年微软发布的体感游戏产品-Kinect便是采用该公司提供的3D传感器。2010年年底,PrimeSense与华硕合作开发了Xtion Pro——和Kinect采用了同样的3D传感器,不过只能在PC上使用。2011年,PrimeSense与Willow Garage合作,创立了旨在“推动3D应用开源软件社区发展”的非营利性机构OpenNI。2012年,PrimeSense推出了世界上体积最小的3D传感器Capri,它的分辨率是前代产品的3倍,而体型是前代的十分之一,环境光的检测性能是前代的50倍,可以在日光下工作。Capri可以嵌入到平板电脑、笔记本电脑、智能手机以及显示器中。最后以34亿美元被苹果收购。
PrimeSense Carmine 1.09短程3D相机传感器用于短距离扫描,可以扫描人脸、头部和较小的物体。它可以像基于PrimeSense技术的Kinect扫描仪一样捕捉运动。
PrimeSense 3D深度传感器是一种端到端解决方案,使设备能够以3D方式感知世界,并以与人们相同的方式将这些感知转换为同步图像,从而利用自然交互的力量。该解决方案包括一个传感器组件,该组件可以理解用户在这些环境中的交互。3D深度传感器可查看并跟踪用户在场景中的移动。所有传感器活动都是在不对用户或环境进行任何假设的情况下执行的。无需可穿戴设备,使解决方案实用,方便,直观且易于使用。该传感器包括几个可选的感官输入功能:深度(3D)图像,彩色(RGB)图像和音频(传感器有2个麦克风)。所有感官信息(深度图像、彩色图像和音频)都通过USB2.0接口传输到主机,并具有完整的时序对齐功能。

其物理尺寸为18×2.5×3.5cm,视场角为54°H×45°V,深度图像分辨率为VGA,即640×480,最大帧率可达60FPS(QVGA),30FPS(VGA),深度范围为0.35-3m,RGB分辨率为1280×960,采用USB2.0/3.0接口。
5. Mantis Vision
Mantis Vision来自以色列,公司专注于高密度结构光,3D及计算机视觉技术15年。Mantis Vision在结构光、容积视频捕获等3D技术方面拥有40多项授权专利,结合软件算法的专长,目前在多个行业和场景已经实现商业化,包括金融支付、服装零售、定制化家居、畜牧养殖、文化娱乐和运输物流等垂直细分领域。
Mantis Vision F6是一种便携式3D扫描仪,F6以最快的工作流程提供卓越的数据质量,使其成为在几秒钟内准确扫描复杂场景的终极设备。没有场景准备、无需目标或贴纸且易于使用。F6 系列产品具有高达0.1mm的精度和高达0.4 mm的深度分辨率,工作范围为0.2m-4m,视场角为20°×26°(最近),15°×20°(最远),帧率为8FPS,数据获取速率为640000points/s。

6. Xtion Pro
Xtion PRO LIVE使用红外传感器,自适应深度检测技术,彩色图像感应和音频流来捕获用户的实时图像,运动和语音,使用户跟踪更加精确。Xtion PRO LIVE开发解决方案附带了一组开发人员工具,使开发人员可以更轻松地创建自己的基于手势的应用程序,而无需编写复杂的编程算法。

其物理尺寸为18×3.5×5英寸,功耗在2.5W以下,深度范围在0.8m-3.5m,视场角FOV为58°H×45°V×70°D,深度图像为VGA(640×480),帧率为30FPS,深度图像分辨率也可为QVGA(320×240),此时帧率可达60FPS,RGB分辨率为1280×1024,接口使用USB2.0。
7. Zivid One+
Zivid One+适用于工业自动化系统和机器人单元的高质量3D彩色相机,拥有灵活的小/中/大视场。其高分辨率及原生RGB的特性,可保证拍摄的点云具备高准确度和高精确度。可在80毫秒内捕获点云,采用安全的白色结构光技术,适用于协作应用。拥有S/M/L型3D相机适用于多种不同工作距离和场景。Zivid One+ 3D通过单帧或多帧成像检测目标、并且拥有具有低遮挡特性的经过优化的基线,具备了宽广的FOV重叠区域。使用了一颗2.3MPixels的图像传感器获取RGB颜色,2D和3D数据,使自动化解决方案能够可靠地检测、检查、挑选、分类和拾取目标对象。
循环时间是高效机器人自动化的关键要素。Zivid One+相机支持快速获取3D数据和最快12FPS的彩色点云成像速度。最快2D彩色成像速度可达50FPS。

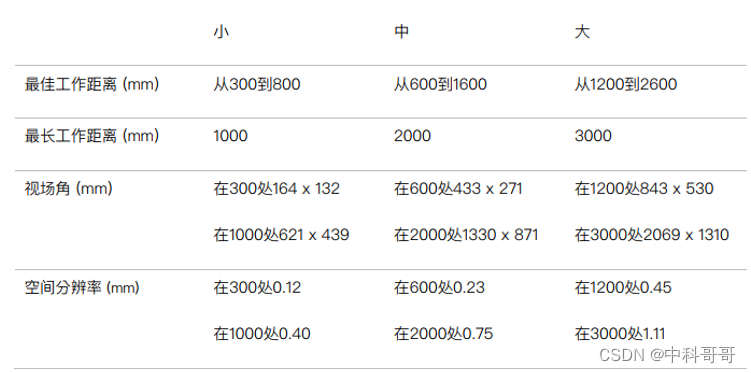
该3D相机采用结构光技术,RGB分辨率为1920×1200,点云可以输出3D(XYZ) + 颜色(RGB) + 对比©,投影仪亮度从1/4x到1.8x,1x等于400流明度,每帧3D画面有12个曝光,采用USB3.0接口,各个型号的有效工作距离和视场角如下所示。
8. optonic
optonic的ensneso是工业3D传感器技术的先驱,为工业工厂的定位和测量领域提供了新的可能性。
N35-606-16-BL相机的物理尺寸为175×50×52mm,3D分辨率为1280×1024,RGB分辨率为1280×1024,帧率为10FPS,视场角为58°H×52°V,接口为GigE以太网接口,支持PCL/ROS驱动。

9. Pickit
Pickit用于机器人引导的3D视觉系统。Pickit M-HD是高精度、高性能的3D视觉系统,最适合从桌子、箱子和盒子中高精度地挑选中小型物体(最小物体尺寸:10×10×5mm)几乎可以解决任何拣选应用的完美选择。Pickit具有以下特性:
高度准确挑选——同类最佳的摄像头;
节省安装和设置时间——可于数小时内插入并开始拾取;
富有高度灵活性的自动化——具有一流的用户界面,可快速适应并完成转换;
摆脱庞大且占用空间的固定装置——Pickit可以在任何位置和场景中找到零件;
安全的生产速度——检测周期不到一秒钟,并且可以在一个周期内找到多个零件;
以固定价格削减成本——现成的产品已经很好地用于40多个国家的150多种应用,且拥有市场上最快的投资回报率;
全天候可靠性更少担心——Pickit可提供全年无休的高质量工作,Pickit软件甚至可以让您随时随地通过它的眼睛关注机器人。

其采用结构光的方式进行3D测量,3D图像捕获时间为200-1000ms,3D相机分辨率为1920×1200,精度为0.15-0.8mm,接口为USB3.0接口。
3.10 Photonneo
基于一种创新的平行结构光技术,Photoneo® 3D相机有着高精确度、高精密度、扫描速度快等特点,并能捕捉运动中的物体。激光投影设备发射一组图案,相机捕捉扫描区域。接着通过算法计算出物体每个可视点的精确位置。该技术不受物体纹理和材质的影响,只要物体能反射光线即可满足扫描要求。同时,结构化的光栅系统也决定着3D重建的品质和扫描速度。在没有直射太阳光和非反光物体的情况下,在1.5米的工作距离,可提供对扫描区域进行至少5fps的扫描。
Photoneo MotionCam-3D是世界上分辨率最高,精度最高的区域3D相机,用于动态场景。它是需要快速、强大的 3D 采集的应用的首选设备。以高细节水平重建各种物体的精确点云,而不会因振动、环境光或运动模糊而影响质量。它采用平行结构光技术,平行结构光将结构光扫描的先进质量和分辨率带入高度动态场景的3D重建中。这项新颖的专利技术采用巧妙的传感器设计,可在一个快照中执行采集,而不是标准图像传感器的顺序扫描。这意味着平行结构光方法实际上可以及时冻结3D场景。

S系列相机的扫描范围为366-558mm,点大小为0.37mm@z=442mm,准确性<0.300mm,时间噪声<0.100mm;扫描仪的点大小为0.25mm@z=442mm,准确性<0.150mm,时间噪声<0.050mm;静态模式时深度图分辨率为1680×1200,动态模式时为1120×800,数据采集时间为10ms,3D点吞吐量为每秒1500万点,物理尺寸为80×68×307毫米,基线为230mm。
11. 奥比中光Astra+
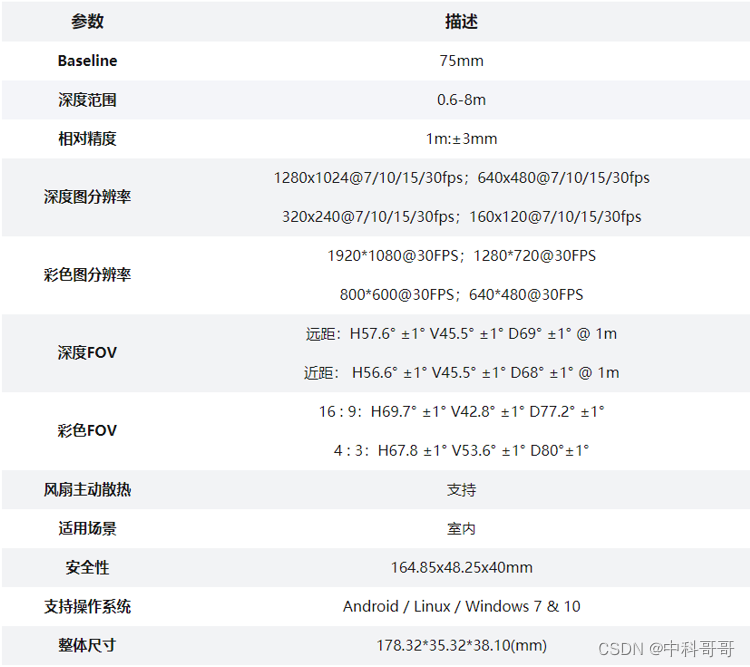
Astra+为奥比中光Astra系列的全新升级产品,外壳采用可拆卸、模块化的设计。拥有独特的智能主动散热系统,在严苛环境下仍能稳定输出高质量的深度图像。
接口升级为USB3.0,可提供更高带宽,USB Type-C带锁定接口,连接方便且稳定;底座采用标准的三角架接口设计,客户可灵活配置不同形态底座,方便固定使用。其测量原理采用的3D结构光技术。

其规格参数等如下: