基本原理:
引入速度控制模块:
/cmd_vel
设置目标角度,计算偏移差值
然后消息传递在z轴移动的角度
代码实现:
C++:

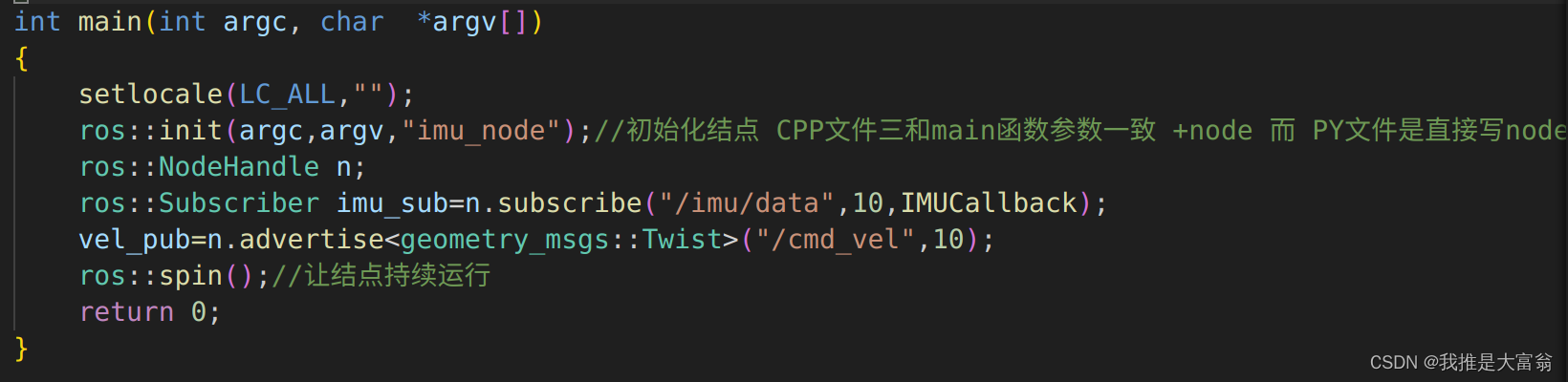
CPP文件还需要编辑CMAKE文件

Python:
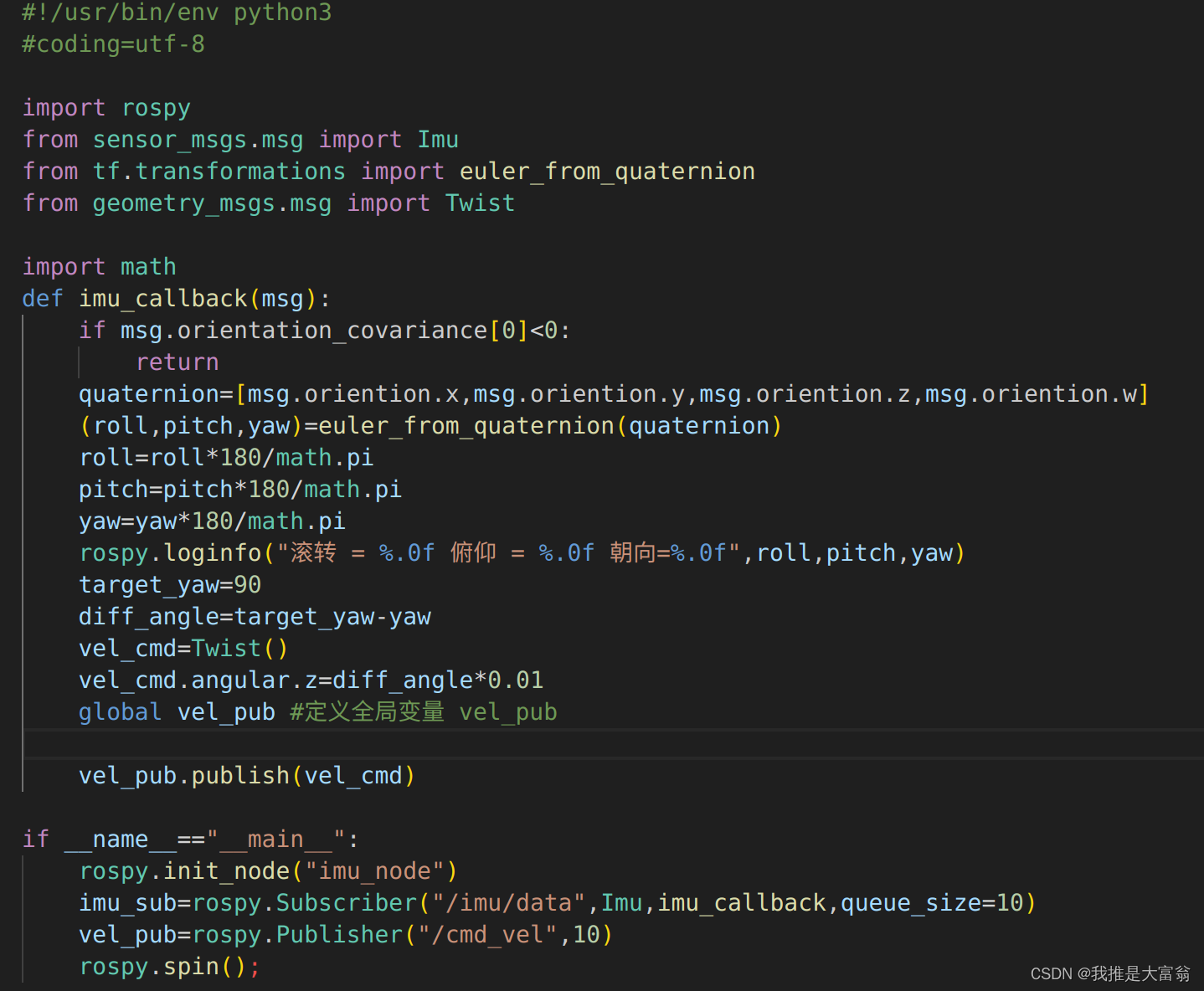
Python文件需要给于权限:chmod +x imu_node.py
引入速度控制模块:
/cmd_vel
设置目标角度,计算偏移差值
然后消息传递在z轴移动的角度
CPP文件还需要编辑CMAKE文件
Python文件需要给于权限:chmod +x imu_node.py
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1685118.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!



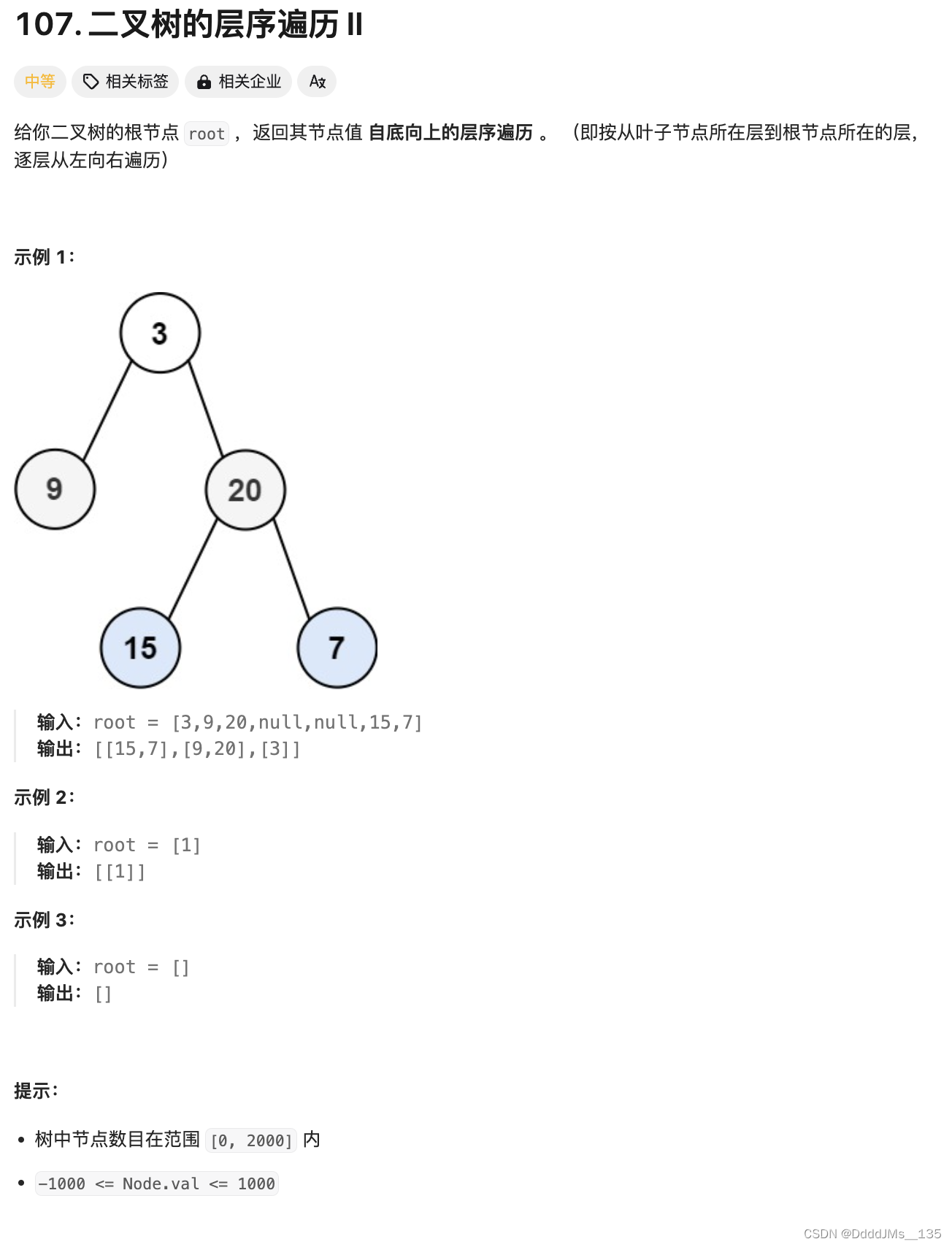
![【代码随想录】【算法训练营】【第15天】 [102]二叉树的层序遍历 [226]翻转二叉树 [101]对称二叉树](https://img-blog.csdnimg.cn/direct/1e2d24fbea6f44c98e9b74bb35aa1d24.png)






![一维前缀和[模版]](https://img-blog.csdnimg.cn/direct/7fcd78b12e1e4f4ab075ed9b9bc54c2a.png)